
Salam Habroyuzery. Nama saya Eugene dan dalam serangkaian artikel saya ingin berbicara tentang proses pengembangan dan pengujian sistem penghindaran tabrakan untuk peralatan industri dan orang-orang yang bekerja bersamanya.
Tapi pertama-tama sedikit cerita. Satu kota di utara adalah kota kami yang luas. Kota ini memiliki tambang besar, yang intinya adalah tempat kerja utama bagi penduduk kota. Jumat, hari kerja sudah lewat di sore hari. Penambang di cakrawala 720 meter merayakan ulang tahun seorang kolega dengan minuman beralkohol yang diselundupkan ke situs secara diam-diam. Dan kemudian seorang penambang mabuk pergi ke udara sebelum pergi ke permukaan, tetapi dalam prosesnya dia sedikit lelah dan tertidur di rel kereta api bawah tanah untuk mengangkut bijih. Dia dibangunkan oleh lokomotif listrik, pengemudi yang dalam gelap tidak memperhatikan penambang malang itu, tertidur di atas rel. Sebagai akibat tabrakan lokomotif listrik di penambang, ia kehilangan pergelangan tangannya. Kisah yang mengerikan, dan banyak kisah serupa dari bagian lain Rusia setiap kali membuat para pemimpin yang berbeda berpikir. Dan apa yang bisa dilakukan untuk membuat cerita seperti itu lebih sedikit atau tidak pernah lebih. Di sinilah permintaan untuk suatu sistem dimulai, yang akan memecahkan masalah mencegah peralatan menabrak orang.
Latar belakang masalah yang mendorong kami untuk mulai mengembangkan sistem seperti itu pada tahun 2016 adalah sebagai berikut. Penambangan adalah salah satu pekerjaan paling berbahaya di dunia. Dan di negara kita, ini adalah salah satu sektor ekonomi utama setelah produksi minyak dan gas. Ada dua cara untuk mengekstrak mineral di seluruh dunia: terbuka (permukaan) dan bawah tanah.
Kami, sebagai pengembang sistem penentuan posisi, telah lama terlibat dalam penentuan posisi penambang di tambang, dan saat ini, secara praktis di semua tambang, masalah penentuan posisi telah dipecahkan pada tingkat tertentu. Namun insiden yang terkait dengan tabrakan peralatan penambangan dan kendaraan yang menabrak personel sayangnya terus terjadi. Di Barat, masalah ini mulai diatasi pada 2006-2010 dengan pengembangan dan implementasi sistem penghindaran tabrakan. Pertama-tama, sistem seperti itu diperkenalkan di tambang, karena insiden serupa lebih sering terjadi di sana. Sejak
Maret 2019, pemasangan sistem penghindaran benturan telah menjadi wajib di Rusia, tetapi tidak di tambang, tetapi di tambang. Dan di sini kita datang sebenarnya ke TK dan permintaan untuk sistem seperti itu.
Semua perusahaan pertambangan di Rusia harus mematuhi peraturan keselamatan industri. Rostekhnadzor (Layanan Federal untuk Pengawasan Ekologi, Teknologi dan Atom) memantau kepatuhan terhadap aturan-aturan ini dan kami terutama mempertimbangkan persyaratan yang diajukan oleh layanan ini ketika mengembangkan sistem. Tetapi karena persyaratan untuk sistem penghindaran benturan di negara kita sejauh ini
dinyatakan secara luas , dalam menyusun TK untuk pengembangan, skenario pengujian dan kriteria penerimaan, kami mengandalkan dokumen internasional yang dikembangkan oleh
EMESRT (Earth Round Equipment Safety Round Table) . Ini adalah organisasi yang menyatukan perusahaan pertambangan, lembaga pemerintah, produsen peralatan pertambangan, perusahaan jasa dan rekayasa di seluruh dunia.
Organisasi ini telah mengembangkan klasifikasi sistem manajemen dan keselamatan untuk penambangan:
- Level 7 - Kesadaran Operator
Teknologi yang memberikan informasi untuk meningkatkan kemampuan operator untuk mengamati dan memahami potensi bahaya di sekitar peralatan.
- Level 8 - Kontrol Penasihat
Teknologi yang menyediakan alarm dan / atau instruksi untuk meningkatkan kemampuan operator untuk memperkirakan tindakan yang tidak aman dan tindakan korektif yang diperlukan. - Level 9 - Kontrol Intervensi
Teknologi yang secara otomatis melakukan intervensi dan mengambil beberapa bentuk kontrol peralatan untuk mencegah atau mengurangi konsekuensi dari situasi berbahaya.
Dasar untuk pengembangan sistem dan program untuk pengujian berikutnya dan skenario pengujian diambil sebagai dokumen
Sistem Interaksi Kendaraan , yang menjabarkan skenario dan situasi utama yang muncul ketika peralatan dan orang-orang bekerja di pertambangan dan kemungkinan insiden dengan mereka.
Ketika mengembangkan sistem untuk peralatan pertambangan, situasi berbahaya berikut ini harus dihilangkan atau bahaya yang disebabkan oleh mereka harus diminimalkan (meminimalkan konsekuensi dari suatu insiden):
- Cedera karena desain stasiun kerja dan struktur eksternal
- Cedera atau rawat inap akibat kelelahan fisik dan / atau mental
- Kerusakan dari visibilitas terganggu (termasuk visibilitas terdistorsi atau terganggu) atau pelanggaran kesadaran bahaya dalam berbagai kondisi operasi
- Kerusakan karena terbatas atau sulit dilihat oleh operator lingkungan dan pengoperasian alat
- Kerusakan tabrakan yang disebabkan oleh pergerakan orang dan kendaraan di zona buta operator
- Bahaya karena kehilangan stabilitas mesin selama operasi, gerakan, artikulasi
- Kerusakan karena penggunaan yang tidak tepat dari kontrol peralatan, kalibrasi yang tidak tepat / tidak akurat, atau pemeliharaan yang tidak efisien karena kontrol dan tampilan yang dirancang dengan buruk
- Kerusakan akibat salah tafsir informasi pada layar atau label
- Bahaya, termasuk mental yang berlebihan, dari peringatan yang terlewat dan alarm yang diabaikan atau tidak didengar
Mereka berisi persyaratan, baik untuk sistem itu sendiri dan untuk jenis perangkat, visualisasi pemberitahuan dan metode pemberitahuan.
Anda harus mengakui bahwa ada lebih banyak persyaratan untuk sistem penghindaran tabrakan daripada dalam edisi Rusia peraturan keselamatan industri untuk perusahaan pertambangan (
Urutan 11 Desember 2013 No. 599 Tentang Persetujuan Norma Federal dan Peraturan di Bidang Keselamatan Industri “Peraturan Keselamatan untuk Penambangan dan Pemrosesan Padat mineral " ), di mana hanya satu titik ditulis:
Poin: 325 Kendaraan pengangkut yang beroperasi di pertambangan untuk penambangan harus dilengkapi dengan sistem penghindaran benturan. Sistem penghindaran benturan harus memberikan pemberitahuan tepat waktu kepada pengemudi tentang keberadaan orang dan kendaraan dalam radius lintasan kendaraan.
Ini adalah daftar persyaratan awal yang jauh lebih besar untuk sistem penghindaran benturan yang dijelaskan oleh EMESRT dan pertimbangan persyaratan ini dalam pengembangan produk yang akan memenuhi semua persyaratan yang ada dan baru yang dapat ditambahkan ke dokumen dan peraturan yang relevan untuk perusahaan pertambangan Rusia di masa depan.
Jadi kami sampai pada skenario utama pekerjaan peralatan dan orang-orang di mana sistem penghindaran tabrakan harus menentukan bahaya dan memperingatkan semua peserta dalam situasi seperti itu tentang hal itu.
Daftar skenario penambangan:- P1-Man terletak tepat di sebelah mesin
- P3-Man dimonitor ketika bekerja dengan mesin dan peralatan
- P4-Man duduk di dalam atau di luar kabin
- L1-Frontal mendekati dengan mesin berdiri
- L2-Mendekati mesin ketika membalikkan dengan mesin berdiri
- L3-Rapprochement dari 2 mobil saat bergerak mundur
- L4-Rapprochement dari 2 mobil saat berkendara satu per satu
- L5-Keberangkatan dua mobil bergerak menuju satu sama lain
- Mobil L6-Two bergerak mundur, dengan satu mobil menyalip yang lain
- L7-Rapprochement dari 2 mobil yang bergerak dan menyalip salah satunya
- L8 Zero Visibility Approach
- C1-Rapprochement dari 2 mobil saling bertemu saat berkendara di tikungan jalan dengan jarak pandang yang tidak memadai
- C3-Mendekati kendaraan yang bergerak maju dengan kendaraan yang bergerak mundur dalam kondisi tikungan dengan jarak pandang yang tidak memadai
- T1-Rapprochement dari 2 mobil bergerak ke arah yang sama di persimpangan
- T2-Rapprochement dari 2 mobil saling berhadapan dengan niat berbelok di persimpangan salah satu mobil
- T3-Rapprochement dari 2 mobil bergerak ke arah yang sama di persimpangan-T pada sudut 90 derajat
- T4-Rapprochement dari 2 mobil bergerak ke arah yang sama di persimpangan 2 jalan teknologi
- Mesin R1 dengan alat kerja berputar bekerja di sebelah mesin lain
- R2-Machine memuat ulang material ke komputer lain
- Mesin O1 mendekati struktur, dinding, atau peralatan stasioner
- V1-Magin memasuki area terbatas di mana lalu lintas dilarang
- V4-Machine bergerak tanpa kendali operator
- V6-Machine bergerak melalui wilayah di mana ada sejumlah besar mobil dan orang lain, misalnya, bengkel
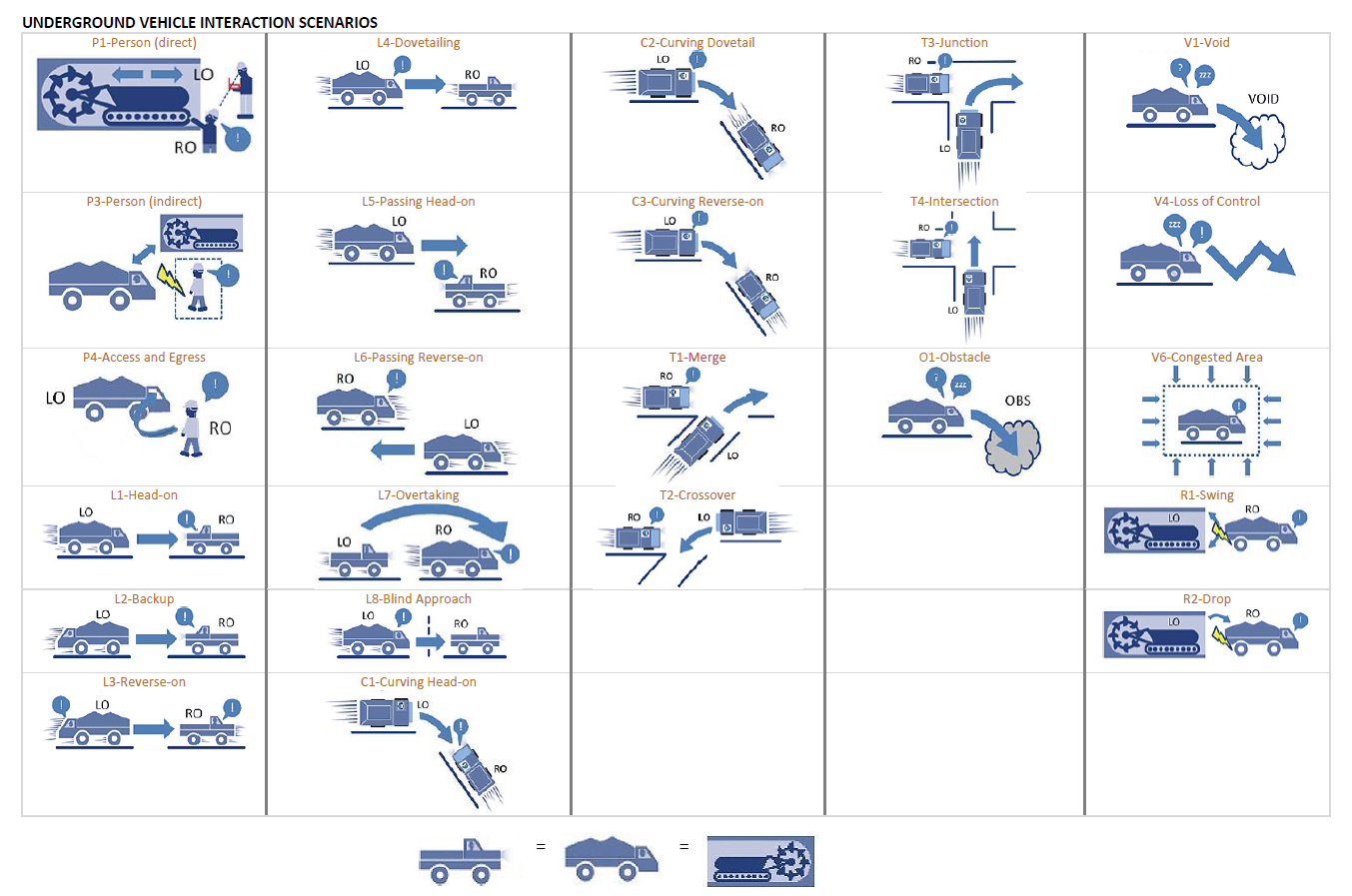
Ada 24 skenario total, yang mencakup 99% dari semua tugas khas diselesaikan dalam penambangan bawah tanah, di mana peralatan self-propelled, kendaraan digunakan dan orang-orang dapat hadir.
Selanjutnya, saya akan memberi tahu Anda bagaimana kami memilih teknologi untuk mengembangkan produk, apa yang harus kami lalui saat membuatnya dan apa yang terjadi pada output, dan bagaimana masing-masing skenario yang dijelaskan di atas diuji.
Teknologi dan solusi untuk menciptakan sistem penghindaran benturan
Sejak 2016, kami telah mengembangkan sistem penghindaran tabrakan tersebut, dan Anda dapat membacanya di artikel tentang Habré di
sini .
pada tahun 2016 terlihat seperti ini Selama waktu ini, kami mengubah teknologi dari teknologi
Nanoloc yang dulu usang
menjadi teknologi
UWB yang lebih menjanjikan. Kami menulis lebih banyak tentang teknologi UWB di Habré di
sini dan di
sini .
Apa keunggulan teknologi UWB (UWB) untuk penentuan posisi objek?- Akurasi posisi tinggi: hingga 10 cm.
- Resistensi terhadap pantulan sinyal radio dalam kondisi visibilitas langsung.
Pada 2018, berdasarkan teknologi UWB, sistem penghindaran tabrakan dikembangkan dan melewati beberapa tahap pengembangan.
Itu terlihat seperti antena prototipe pertamaPada tahap pertama pengembangan, papan antena dibangun menjadi senter untuk peralatan khusus. Frekuensi lampu kilat senter ditentukan di zona mana tag pribadi berada.

"alt =" image "/>
Salah satu tahap pengujian perumahan antena baruRumah antena dibentuk dari polimer hijau tugas berat. Warna dipilih berdasarkan fakta bahwa tidak boleh ditemukan di lingkungan di mana sistem akan digunakan.

Sekarang sistem terdiri dari komponen-komponen berikut:
 Tag (TAG)
Tag (TAG) - sebuah chip dengan dukungan untuk teknologi UWB, dibangun di dalam senter penambang atau perangkat terpisah berdasarkan itu.
 Antena (VBU)
Antena (VBU) - dipasang di kulit kendaraan. Ini juga berisi chip UWB, yang menentukan jarak ke chip UWB lain oleh ToF (Waktu Penerbangan).
 Unit kontrol (VCU)
Unit kontrol (VCU) adalah komputer mikro yang memproses pengukuran yang diterima dari antena dan, menggunakan algoritma matematika, menentukan lokasi tag relatif terhadap kendaraan dan mengirimkan data untuk visualisasi ke layar pengemudi.
 Display (VOD)
Display (VOD) - menyediakan representasi visual informasi tentang lokasi tag relatif terhadap mobil.
Di jantung teknologi penentuan posisi UWB adalah chip dari perusahaan Irlandia Decawave. Chip memiliki antena sendiri, yang dapat digunakan untuk mengukur waktu transit sinyal di antara mereka. Karena chip UWB yang sama terletak di VBU seperti pada tag, mereka mendeteksi satu sama lain di hadapan visibilitas radio dan juga mengukur di antara mereka sendiri. Prinsip ini memungkinkan Anda untuk menentukan waktu penerbangan sinyal, seperti antara antena kendaraan, jadi antara antena dan tag.
Dari sini kita mendapatkan dua bidang kendali:
- transport-vehicle (Kendaraan ke Kendaraan atau V2V)
- transport-person (Kendaraan ke Personel, V2P)
Prinsip sistem
Sistem ini didasarkan pada prinsip menciptakan di sekitar kendaraan 3 zona kontrol kedekatan yang berbahaya. Selain itu, zona dapat berbentuk apa saja dan mempertimbangkan fitur struktural dan parameter gerakan kendaraan.
Zona PerhatianMemperingatkan pekerja tentang keberadaan kendaraan, peralatan, dll. Dalam jarak dekat.
Sistem memberi sinyal kemungkinan pendekatan berbahaya dan memungkinkan pengemudi dan penambang untuk menarik perhatian pada fakta mendekati objek lain.
Antena (VBU) memancarkan sinyal ke ruang di sekitar kendaraan UWB untuk mencari antena lain (VBU) atau tag pribadi (TAG) di zona visibilitas radio.
Jika antena lain (VBU) atau tag pribadi (TAG) terdeteksi di zona "Perhatian", jarak dari antena (VBU) ke objek diukur.
Data tentang pengukuran jarak ditransmisikan ke unit kontrol (VCU), di mana lokasi objek yang terdeteksi pada jarak, arah dan area dihitung.
Hasil perhitungan ditampilkan pada tampilan driver (VOD).
Area perhatian pada layar Zona BahayaIni memperbaiki pemulihan hubungan yang berbahaya dan menarik perhatian pekerja, dapat memperlambat peralatan dan transportasi.
Sistem ini memberitahukan kemungkinan kecelakaan dan memungkinkan Anda untuk menarik perhatian pengemudi dan penambang pada fakta mendekati objek lain.
Pengemudi melihat pada layar (VOD) di mana zona objek terdeteksi dan ketika mendekati kendaraan, objek akan bergerak dari zona "Perhatian" ke zona "Bahaya" di layar (VOD). Pada saat yang sama, peringatan cahaya dan suara (VOD) akan muncul di kabin ketika objek memasuki zona "Bahaya", memancarkan suar dan peringatan suara akan diaktifkan baik di kabin pengemudi maupun di luar kendaraan. Pada saat yang sama, peringatan suara dan cahaya juga akan menyalakan tanda pribadi karyawan (TAG) atau di kabin kendaraan lain yang dilengkapi dengan produk RealTrac Collision Avoidance.
Zona KecelakaanIni menghasilkan alarm ketika objek lain yang dilengkapi dengan sistem memasuki zona Alarm.
Ketika suatu benda masuk dari zona "Bahaya" ke zona "Kecelakaan", semua cara untuk memberi tahu pengemudi kendaraan disertakan. Sinyal bahaya merah menyala pada tampilan pengemudi (VOD) dan bunyi peringatan yang konstan terdengar. Tag pribadi penambang (TAG) juga menyertakan peringatan suara dan peringatan getaran untuk menunjukkan bahwa mereka berada di zona Kecelakaan.
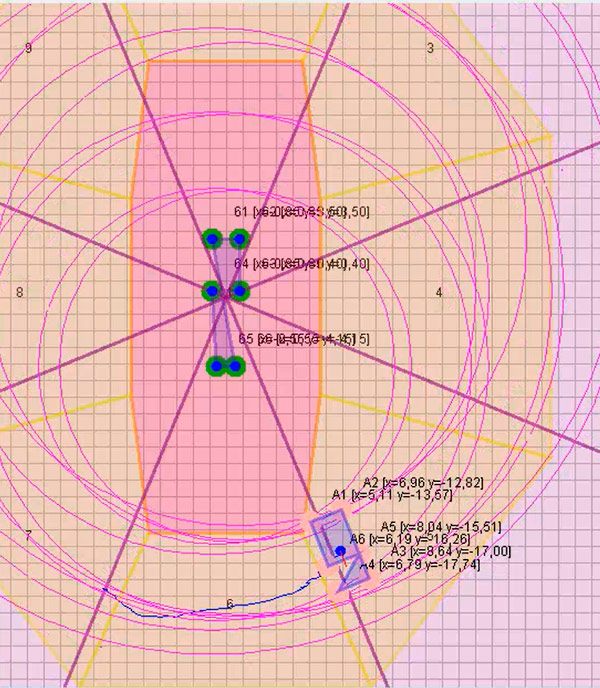
Zona kerusakan ditampilkan Ini adalah seperti apa zona kontrol terlihat di konfigurator sistem penghindaran tabrakan. Titik pemasangan antena pada kendaraan dan tanda yang dipasang pada kendaraan lain terlihat. Pagar kotak 1 m.
Ini adalah prinsip sistem yang dijelaskan dalam teori. Bagaimana semua ini terlihat dalam praktek, saya akan memberi tahu di bagian kedua artikel dalam seminggu.
Jika Anda memiliki pertanyaan, tulis di komentar.