
Pada bagian pertama saya berbicara tentang konsep proyek. Pada bagian kedua, kami menganalisis desain robot MIRO dengan tulang (banyak gambar).
Pada awalnya saya mengucapkan terima kasih atas ide dan dukungan Anda setelah publikasi pertama ! Butuh sedikit waktu untuk membangun format dukungan proyek bersama. Karena itu, setiap orang yang memutuskan untuk bergabung, saya meminta Anda untuk memberi saya sedikit kali ini - segera semuanya akan terjadi!Daftar Isi:
Bagian 1 ,
Bagian 2 ,
Bagian 3 ,
Bagian 4 ,
Bagian 5 .
Seperti yang saya sebutkan di bagian pertama, versi MIRO lama praktis tanpa bagian plastik yang dibuat menggunakan printer 3D, dan hampir seluruhnya terbuat dari bahan lembaran dengan pemotongan laser. Akrilik dan kayu lapis digunakan. Plus, hanya ada satu - relatif murahnya partai kecil. Nah, kecepatan produksi yang relatif tinggi dari produk itu sendiri. Tetapi selama operasi, saya harus menjauh dari pendekatan ini. Alasan utama adalah bahwa bagian-bagian yang dirakit dari bahan lembaran, pengencang tidak akurat, tidak dapat diandalkan, membawa rakitan yang panjang dengan sekelompok gadget kecil, cincin, kunci. Seluruh struktur tidak memiliki perasaan menyenangkan "dirobohkan." Ya, dan banyak batasan pada bentuk dan geometri. Dengan pencetakan 3D, semuanya jauh lebih sederhana.
Salah satu persyaratan utama dalam desain kasing, saya mengidentifikasi kesederhanaan pencetakan - jika memungkinkan, detail kasing harus dicetak tanpa dukungan. Baik, atau dengan dukungan yang sangat sederhana. Jadi semuanya jujur - saya bisa mencetak robot yang sangat baik pada ANET A6 murah kami langsung dari kotak, seperti yang mereka katakan.
Semua desain dilakukan di Autodesk Fusion 360.
Robot terdiri dari banyak bagian tubuh, yang secara kondisional dapat dibagi menjadi tiga kelompok:
- sekelompok bagian yang dibuat oleh teknologi cetak 3D
- sekelompok bagian yang dibuat oleh teknologi pemotongan laser
- produk serial.
Konvensi di sini adalah apa yang dimaksud adalah metode pembuatan komponen yang paling jelas. Tetapi tidak ada yang mau mencetak rincian kelompok kedua pada printer.
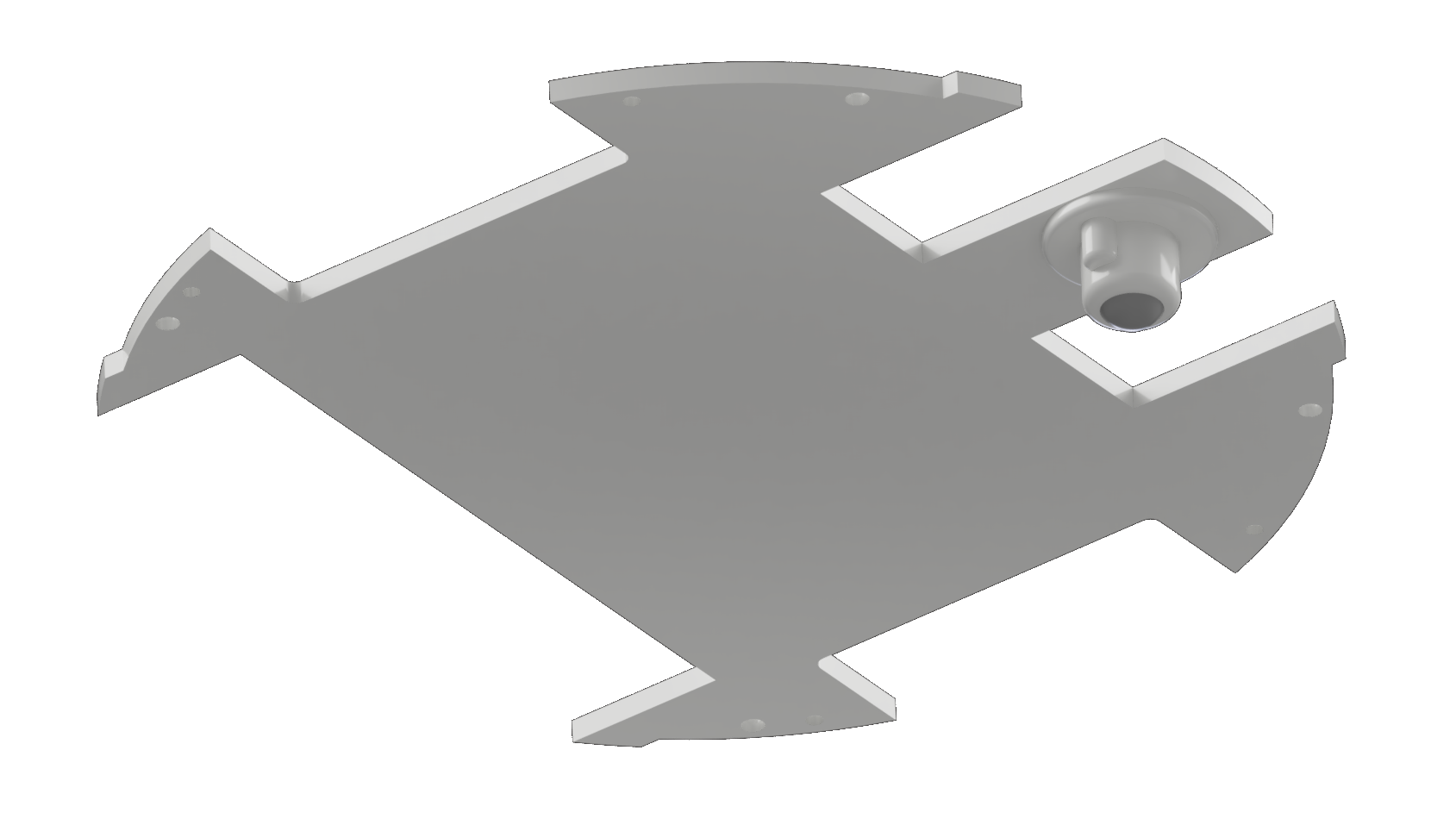
Jadi, robot berkumpul di sekitar platform pusat yang terbuat dari kayu lapis 4mm (grup 2). Karena di bagian ini ada banyak lubang dan slot, dan itu adalah pembawa itu sendiri, tidak disarankan untuk menggunakan akrilik untuk produksinya - ini cukup rapuh.
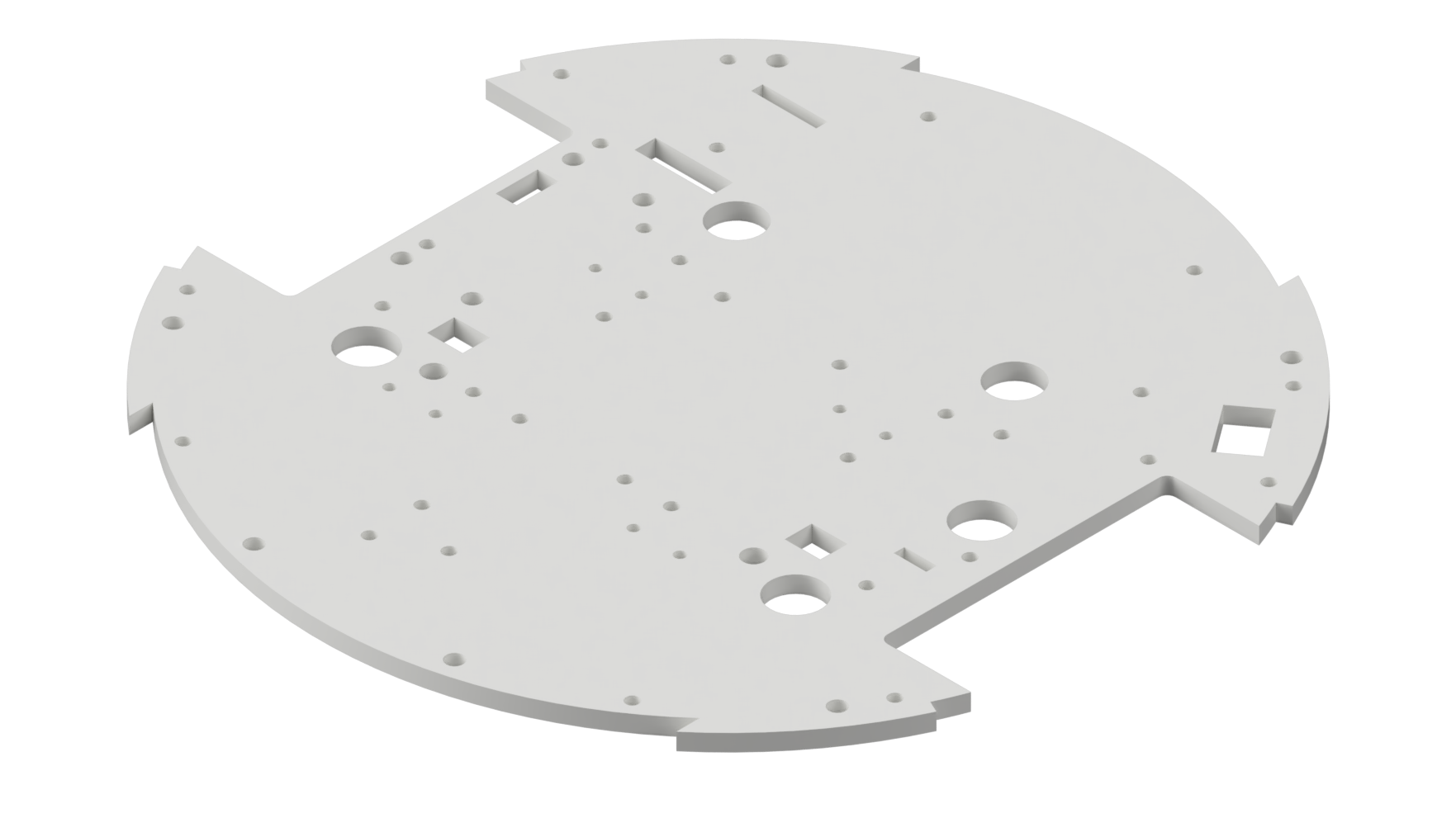
Hampir semua bagian saling berhubungan dengan baut dengan panjang yang berbeda dan mur M3. Dan hanya untuk papan pemasangan Anda harus menggunakan M2.5. Bagian yang dicetak memiliki rongga untuk "menekan" mur (umpan ketat).
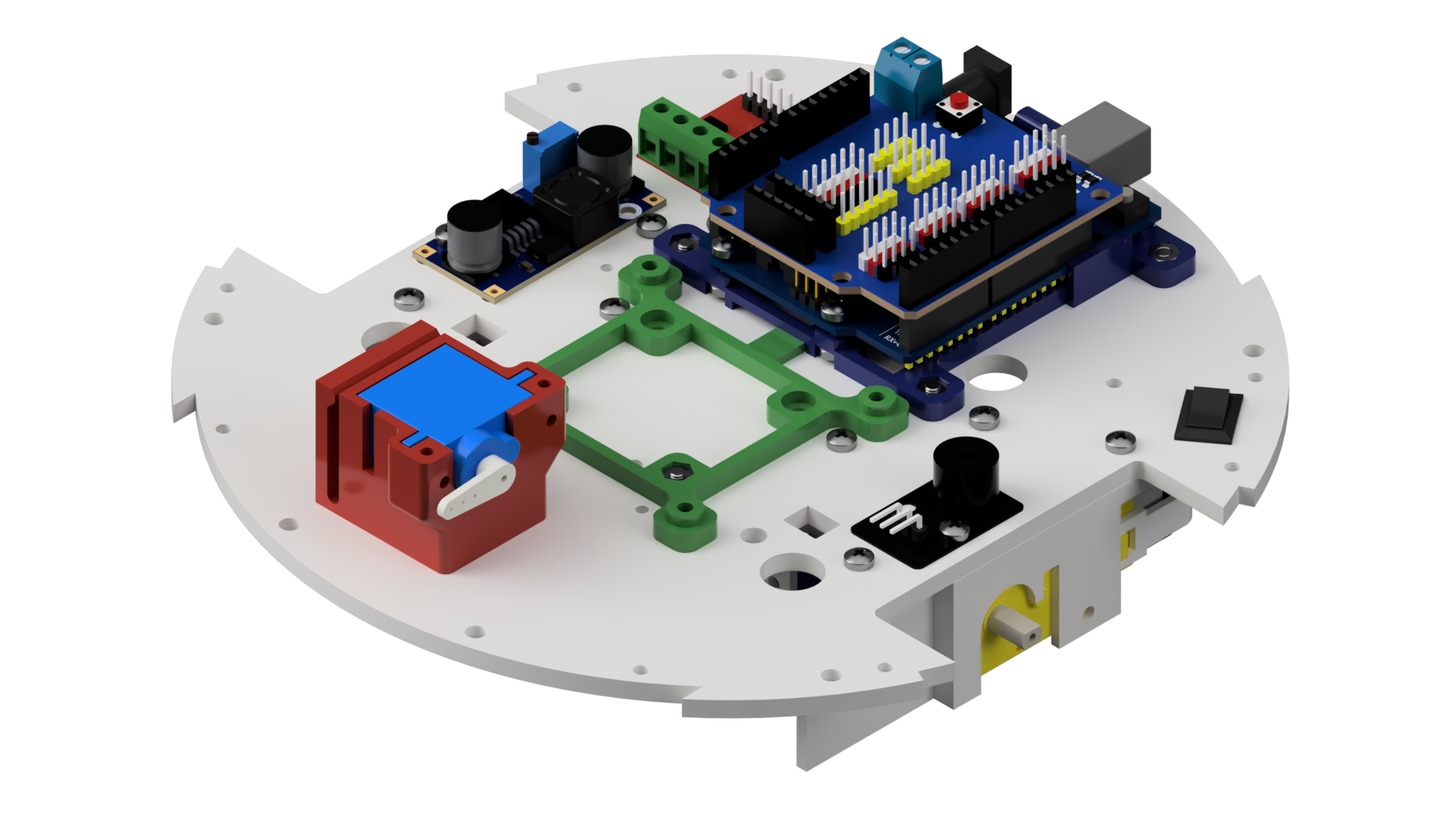
Di atas platform terpasang dua media (grup 1) untuk papan sirkuit tercetak: ARDUINO dan Raspberry Pi.
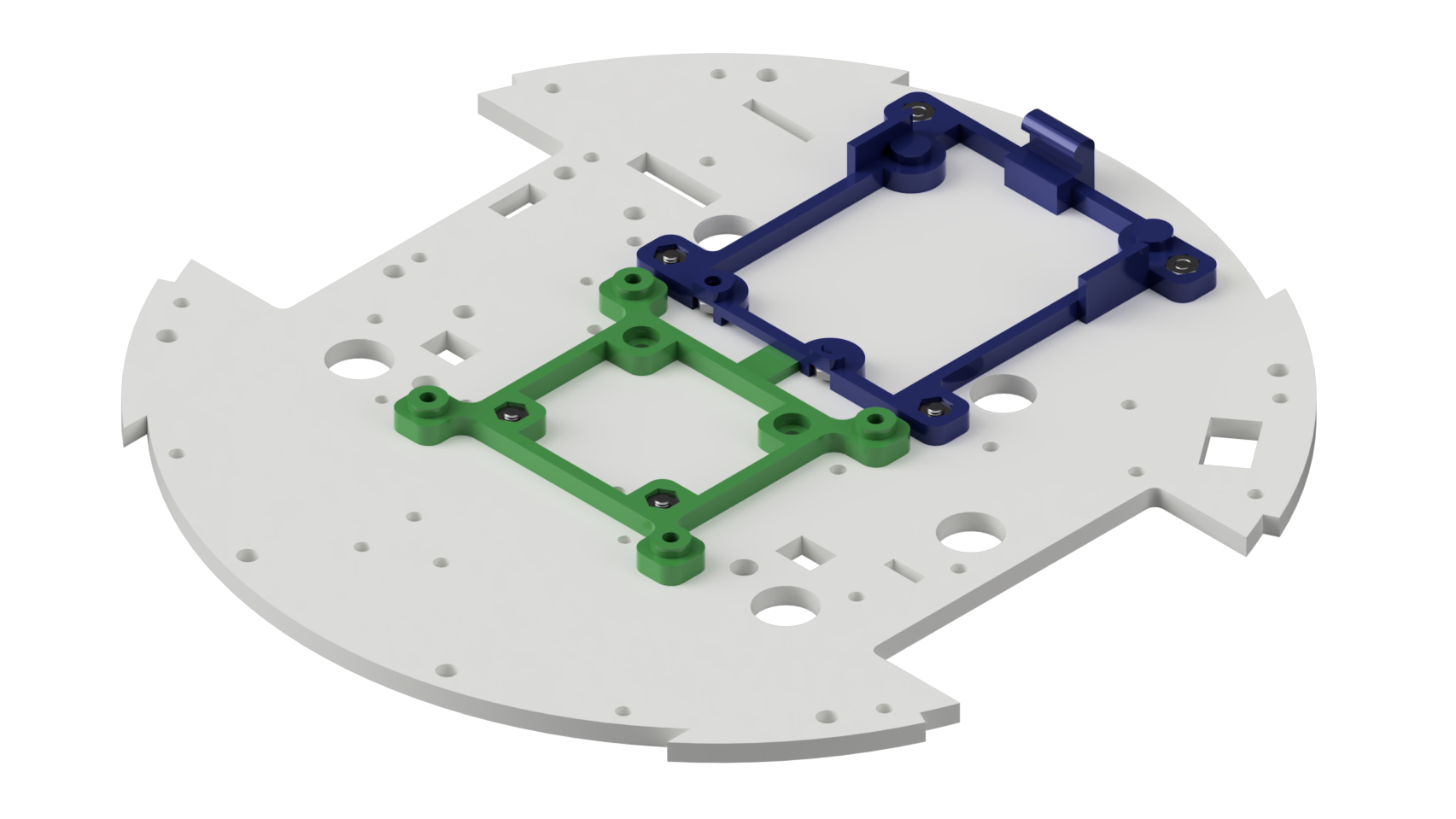
Substrat ini, bersama-sama dengan rongga tambahan untuk mur di dudukan gearbox motor, memungkinkan Anda untuk menghapus dari robot dan mengganti pengontrol, driver motor, pengatur tegangan - dengan kata lain, hampir semua elektronik robot dengan hanya melepas penutup atas.
Substrate untuk Raspberry Pi dipasang pada dua baut di satu sisi, dan di sisi lain memiliki tab yang dimasukkan ke slot di bawah substrat untuk papan ARDUINO. Dari bawah, mur M2.5 ditekan ke dalam substrat untuk pengikatan baut selanjutnya dari papan yang sesuai.
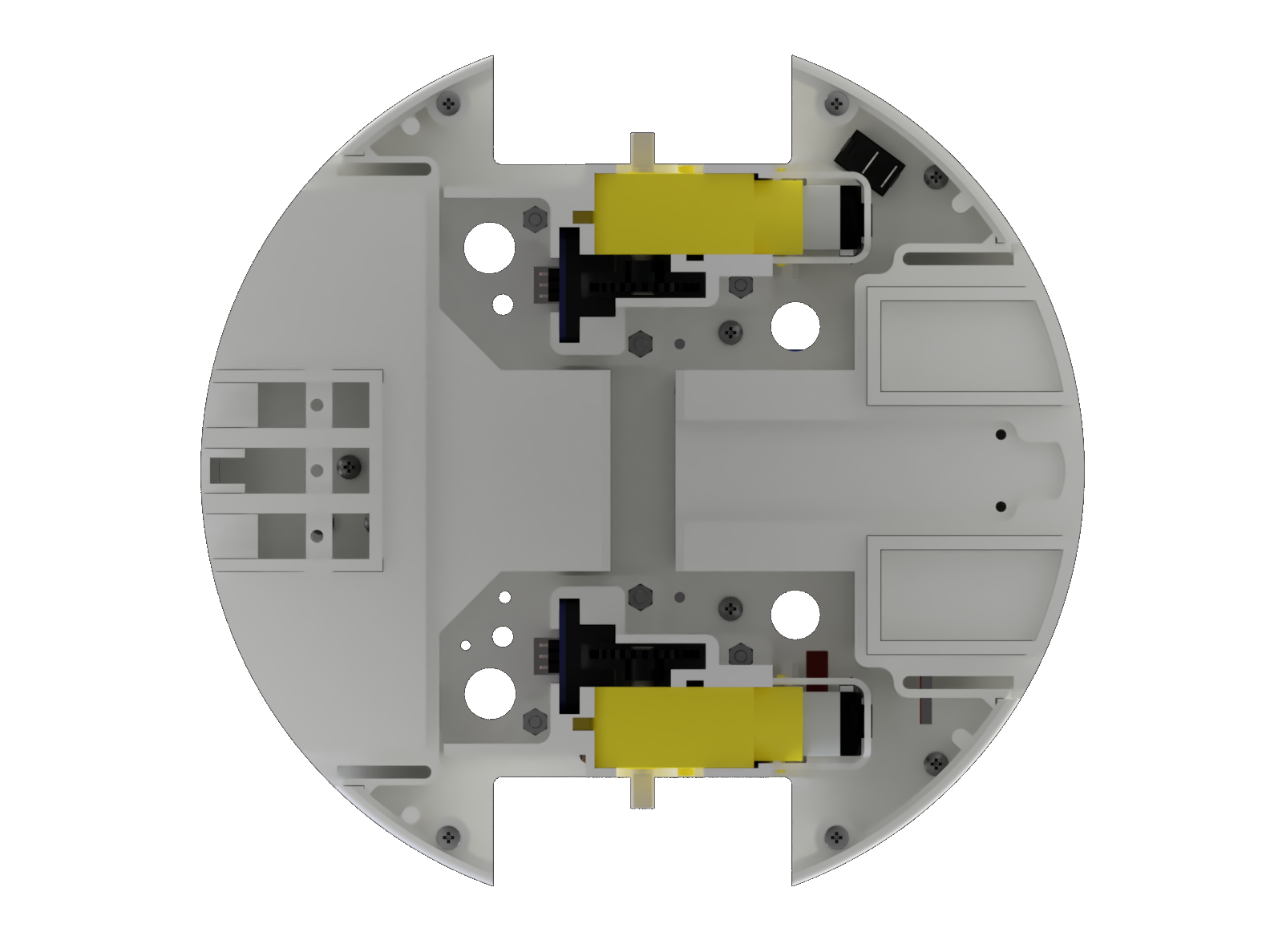
Bawah ke platform tengah dipasang dudukan (grup 1) untuk motor gir dan encoders slot optik.
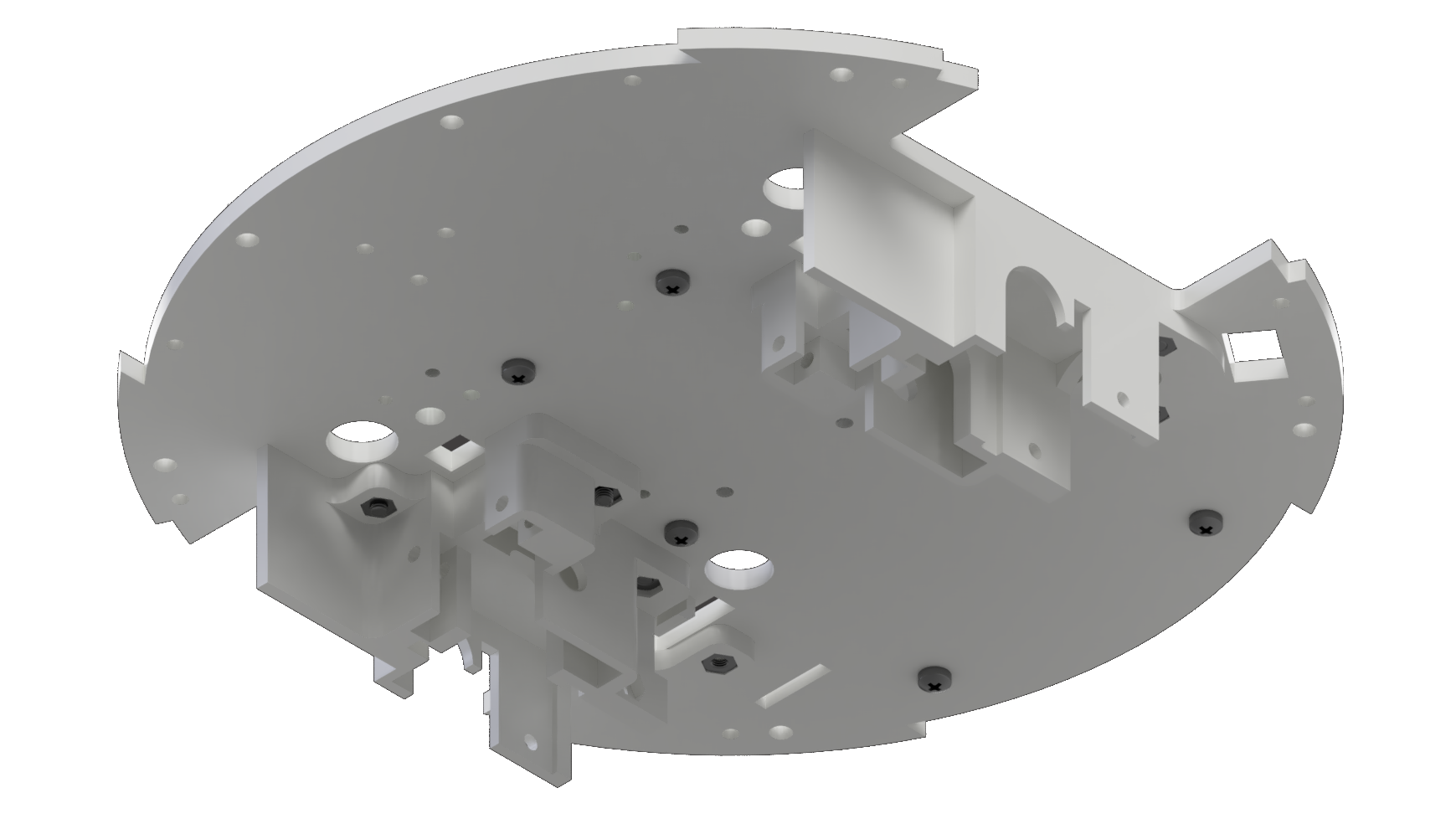
Di depan tiga baut dipasang bagian lain dari grup 1 - dudukan kamera servo.
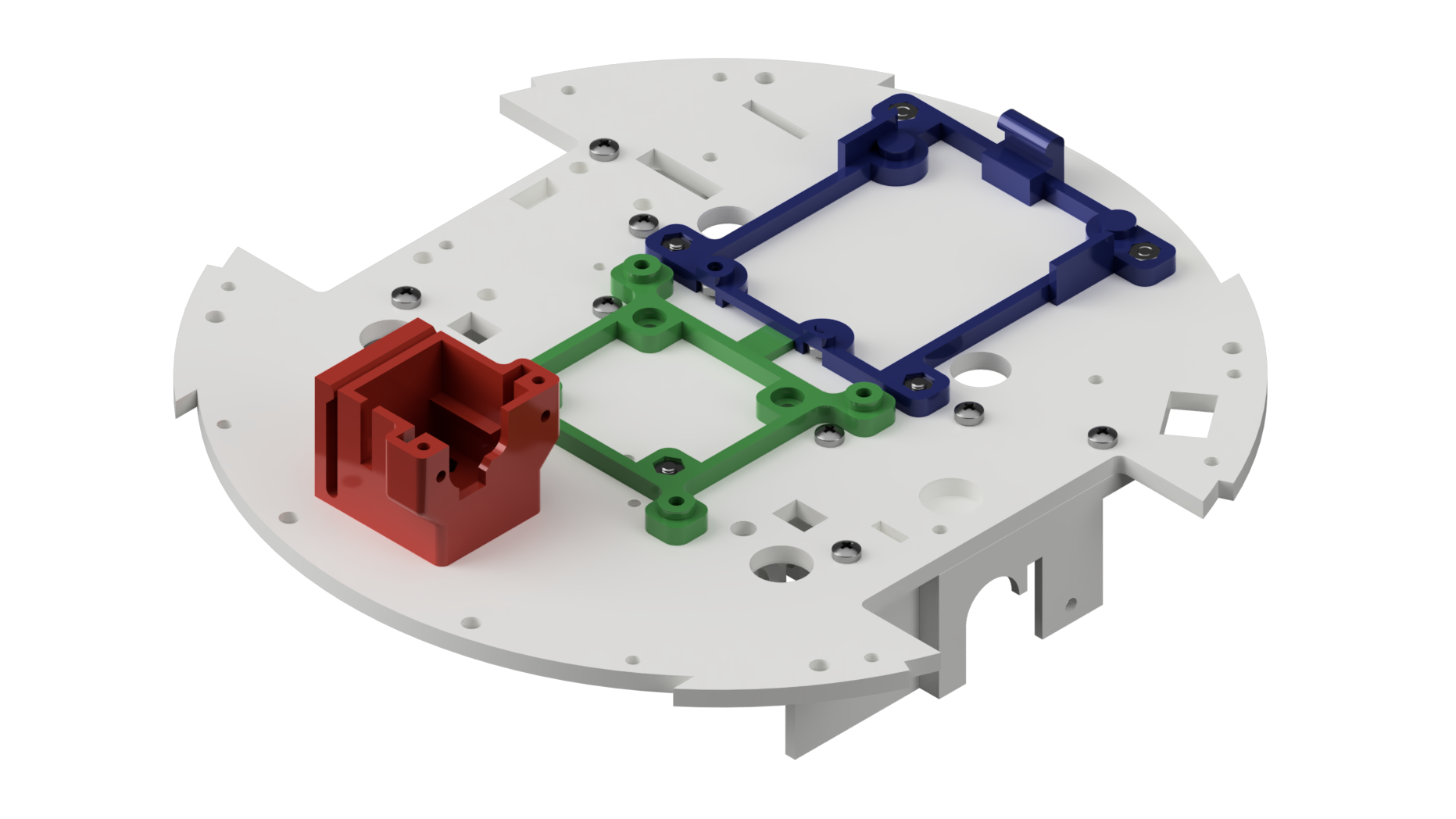
Pada prinsipnya, pada tahap ini, Anda dapat mulai memasang elektronik. Papan Raspberry Pi tidak ditampilkan pada render, karena jatuh di suatu tempat dari proyek, tetapi ada di substrat hijau. Kartu ekspansi juga ditampilkan sebagai "beberapa" - seperti yang saya sebutkan di
artikel pertama - "sandwich" dapat dilakukan dengan cara yang berbeda (baik ARDUINO UNO dan kartu ekspansi dengan ESP8266 dan konektor tiga pin di atas, atau kartu WiFi ARDUINO + dan kartu ekspansi serupa. yang ada di gambar).
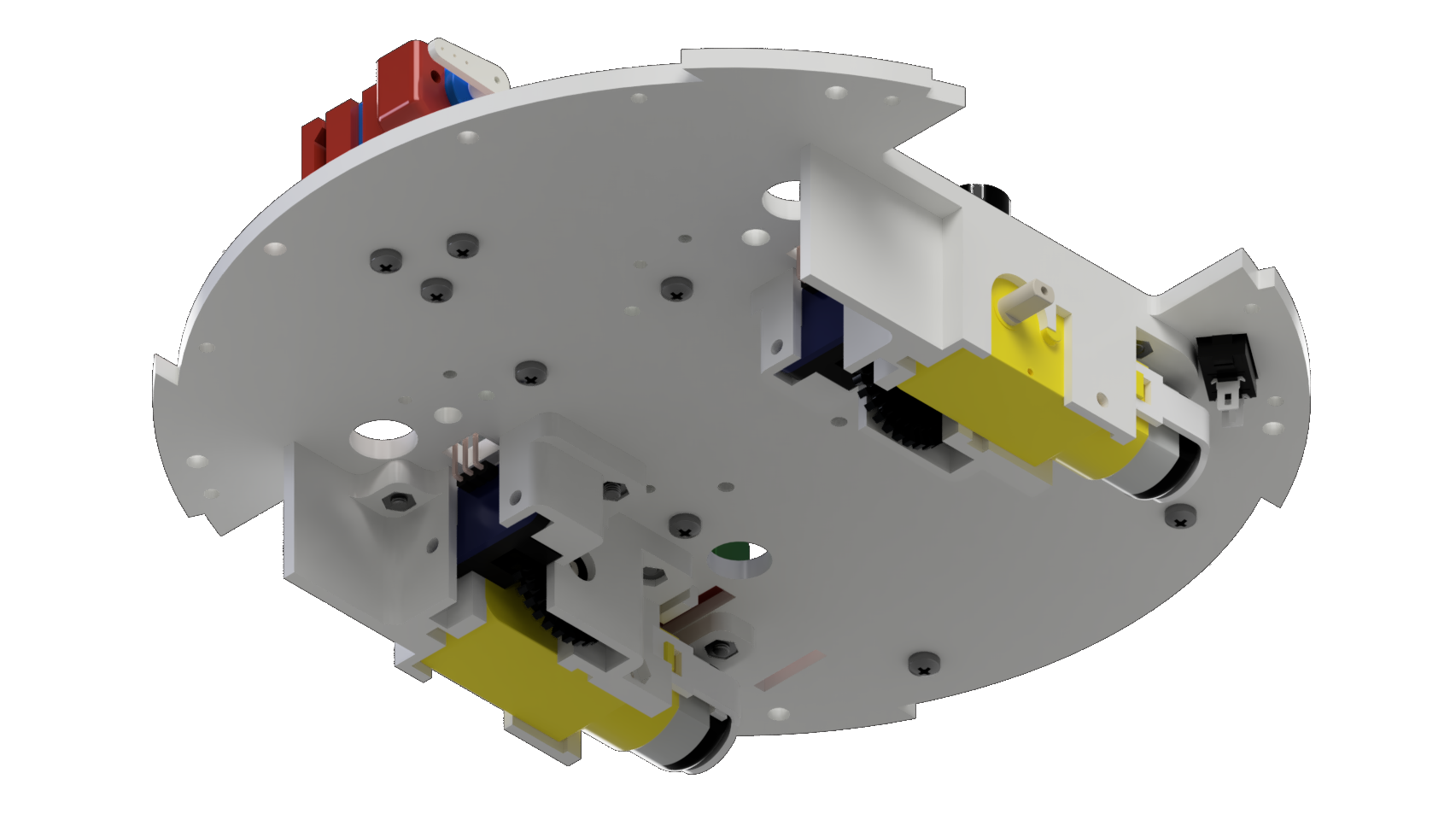
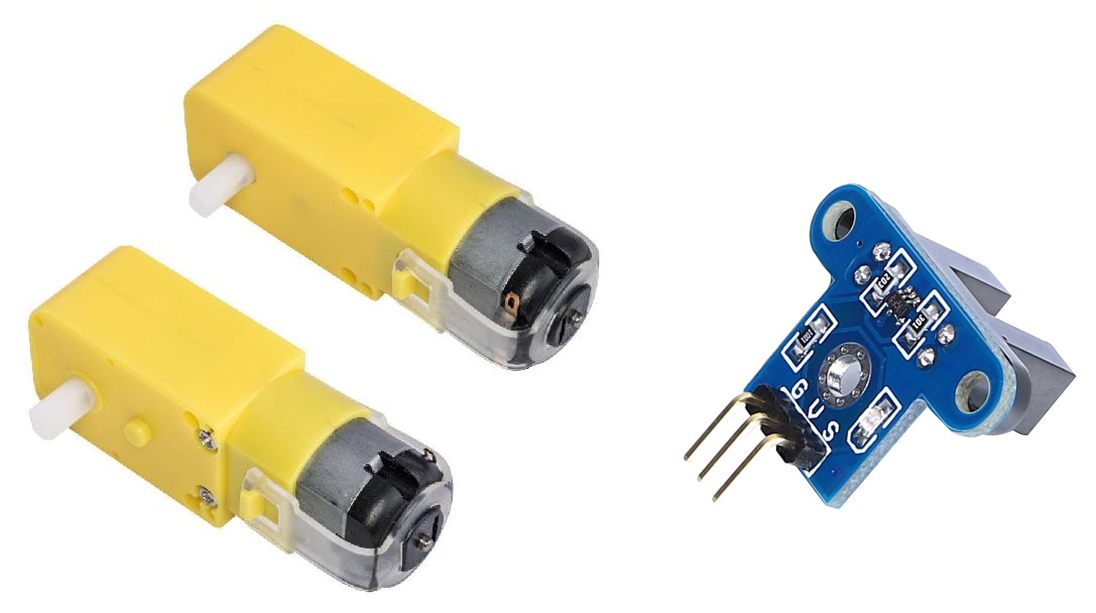
Seperti yang Anda lihat, MIRO menggunakan motor "kuning" murah yang biasa. Ini adalah salah satu kompromi yang paling menjijikkan dalam mekanisme proyek. Mereka tidak bisa diandalkan, mereka berisik. Tetapi mereka terjangkau. Pertama-tama, dengan ketersediaan di sudut mana pun. Selain itu, seperti diketahui, enkode slotted mudah dikirim kepada mereka setelah gearbox. Dan dengan mempertimbangkan fakta bahwa sinyal dari encoders terganggu oleh ATMEGA328 yang sederhana dan terjangkau, inilah yang Anda butuhkan. Beberapa motor dengan encoder ke gearbox "segera pasang" chip ini. Secara umum, keputusan untuk menggunakan motor khusus ini adalah kompromi yang menyakitkan. Tetapi di MIRO, kami melakukan segalanya untuk sedikit meningkatkan sifat operasional mereka - motor dipasang erat memeluk motor-motor ini dari semua sisi, mengurangi penyelarasan roda yang biasa untuk perangkat Cina dan serangan balik tambahan yang disebabkan oleh kekakuan yang tidak memadai dari kotak roda gigi. Encoders, seperti dalam gambar, hanya dimasukkan ke dalam alur dari bagian yang dicetak dari motor mount.
Selanjutnya, 8 bagian yang dicetak dari dinding casing luar (grup 1) melekat pada platform: 4 dari atas dan 4 dari bawah.

Dari bawah, semuanya ditutup oleh penutup (grup 2), di mana roda penopang belakang dipasang melalui spacer adaptor (grup 1). Roda joki - standar, luas, mencari “3PI N20 UNIVERSAL BALL WHEEL”.
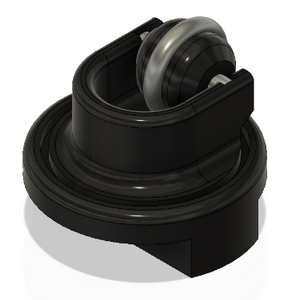
Masalah yang agak besar, ternyata, adalah menemukan roda pendukung normal untuk robot kecil. Semua roda bola memiliki satu minus - bola keras yang melaluinya semua getaran dari gerakan ditransmisikan ke tubuh robot. Dan roda dengan hub juga semuanya plastik. Kami bahkan mengembangkan untuk MIRO roda kami sendiri di hub - dengan tapak cincin O ukuran standar. Namun proyeknya belum dimuat secara normal. Ini tidak mudah untuk diproduksi, karena menggunakan dua bantalan miniatur sekaligus. Mereka mudah dipesan dari Cina, tetapi jelas tidak tersedia. Namun kualitas pergerakan robot, rasa MIRO dengan roda ini sangat berbeda - robot bergerak dengan lembut dan pelan. Siapa yang mengunjungi situs
mirorobot.ru , dia bisa memperhatikan penyebutan dia dalam proyek.
Di sebelah kanan dan kiri, serta di belakang robot, alih-alih bagian cetakan plastik, digunakan plastik PVC tipis (1 mm) (grup 2). Untuk memperbaiki sisipan di dinding casing luar ada alur. Melalui sisipan samping, Anda dapat dengan mudah mencapai konektor USB Raspberry Pi, dan melalui sisipan belakang, ke papan USB ARDUINO (atau ARDUINO + WiFi) tanpa melepas penutup atas kasing.

Penutup atas (grup 2) memiliki lubang untuk memasang pegangan tanggam (grup 1) untuk membawa robot.
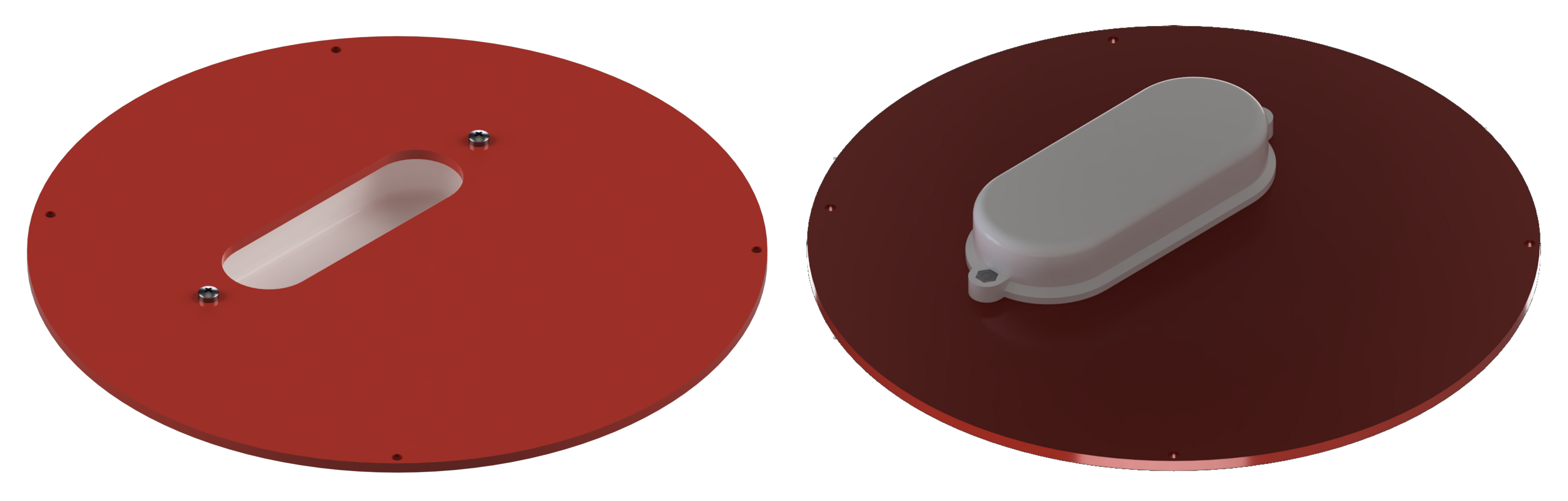
Penutup atas itu sendiri dipasang pada robot dengan koneksi baut yang sama (lihat ilustrasi utama untuk
publikasi pertama ).

Roda penggerak robot dibuat menggunakan teknologi cetak 3D, bersama dengan tapak, yang merupakan produk seri - gelang silikon (grup 3) dengan diameter 65 mm. Ini adalah ukuran yang paling umum - jika Anda mendapatkan gelang semacam itu untuk beberapa jenis pesta - 90% cocok. Baik, atau Anda dapat membelinya di perusahaan periklanan yang memproduksi dan menjual berbagai produk bermerek ("merch").
Modul depan dan belakang (grup 1) dipasang di bagian depan dan belakang robot dengan kait.

Berikut ini contoh modul depan SENS1.
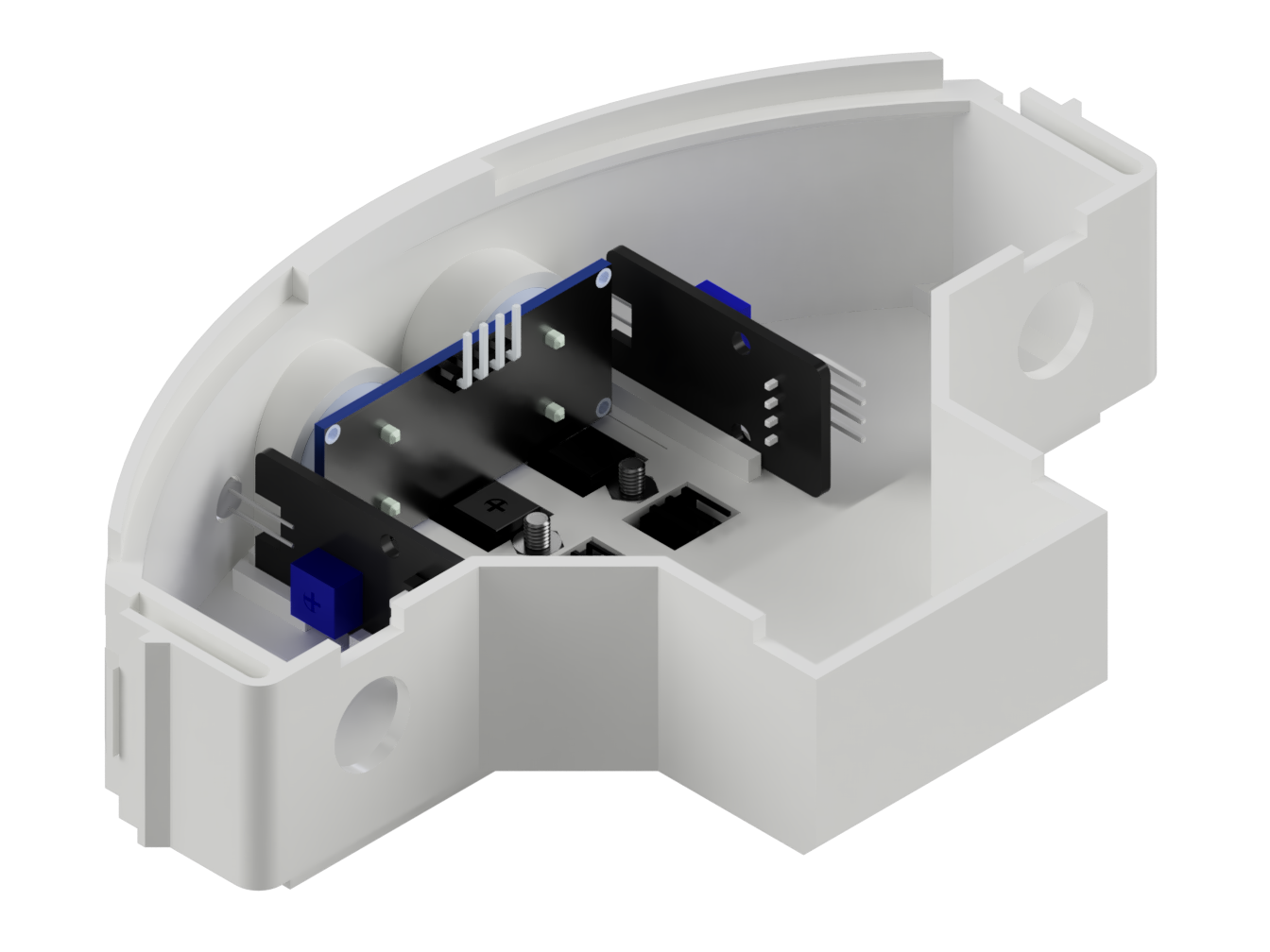
Modul di atas tidak menutup sama sekali - mereka hanya dimasukkan di sepanjang panduan antara penutup bawah dan platform pusat.
Agar mudah dilepas, pada detail dinding case terdapat guntingan untuk jari-jari, sehingga nyaman untuk menekan kait dan melepaskan modul.
Gambar tersebut dengan jelas menunjukkan posisi modul dalam robot dengan penutup bawah dilepas.

Baterai terletak di modul belakang (sekarang dual 18650, 7.4V), tetapi keputusan telah dibuat untuk sedikit meningkatkan kedalaman modul belakang untuk baterai LiPo 2200-2500mAh (diperiksa - disertakan).
Di dinding kiri belakang kasing terdapat lubang untuk jari (ya, ya, di bawah jari telunjuk) untuk mengakses sakelar sakelar daya. Keputusan ini dibuat secara sadar - saya tidak ingin membuat sakelar sakelar pada penutup atau dinding luar kasing, yang mudah untuk dimatikan secara tidak sengaja.
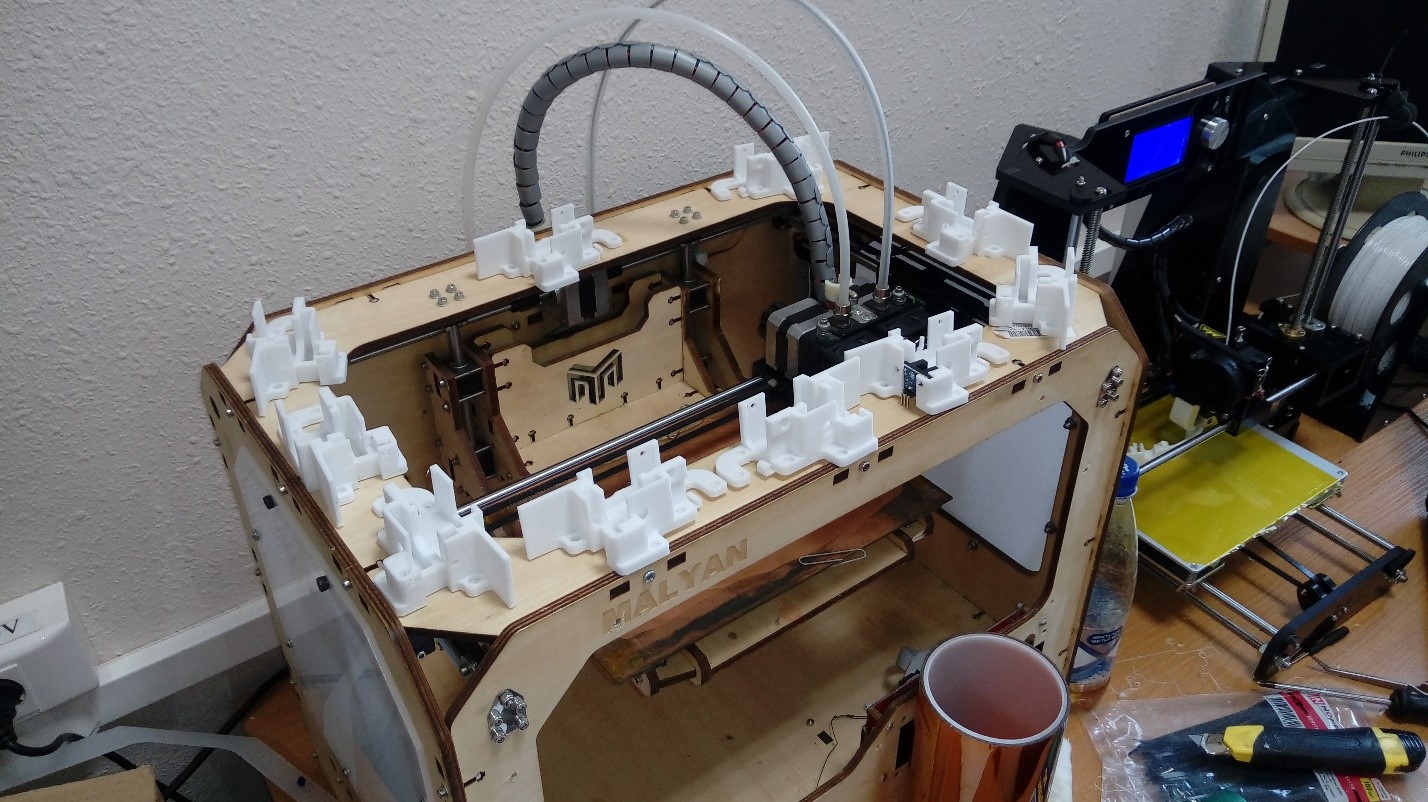
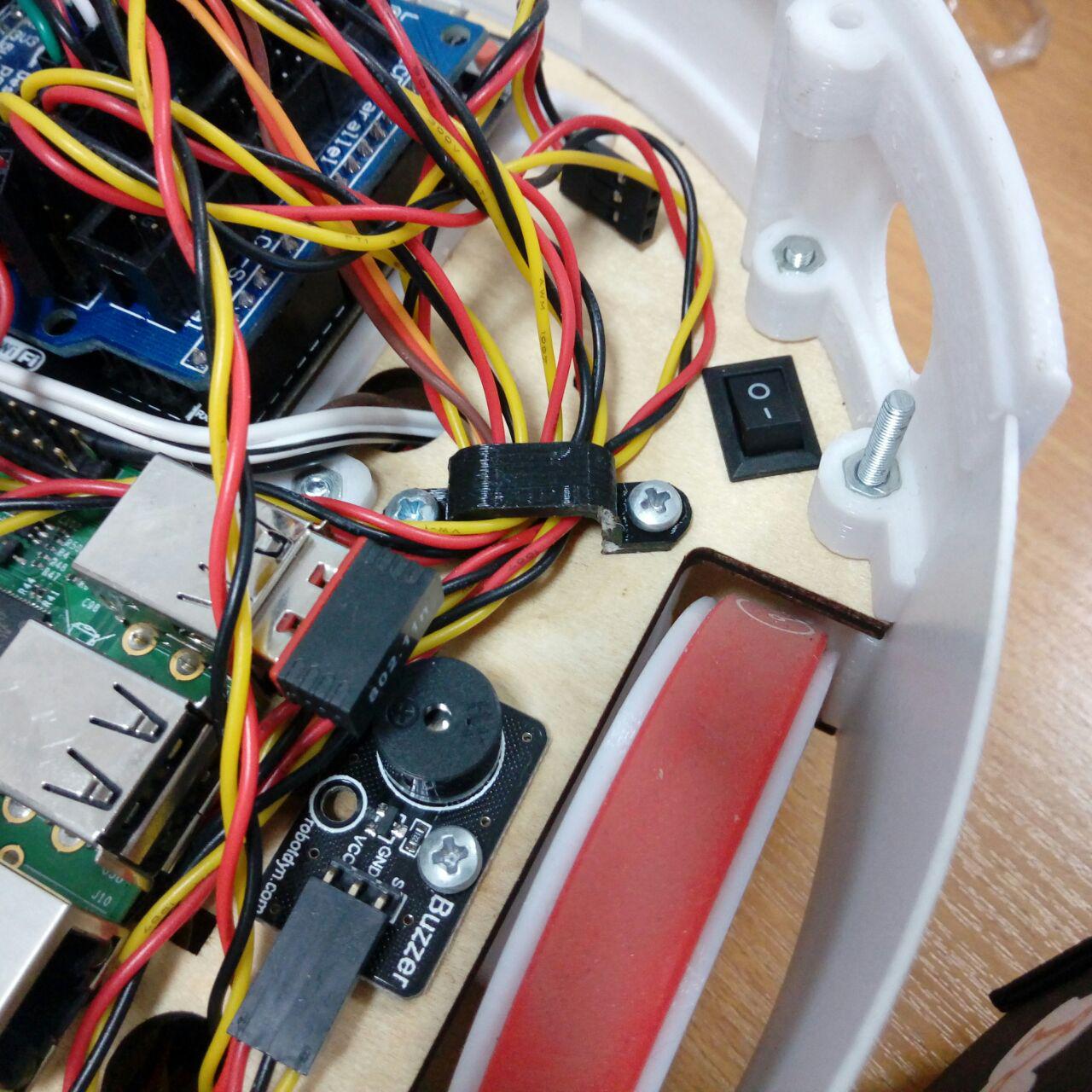
Sekarang tentang tugas (bukan tentang masalah, karena semua ini sedang diselesaikan). Pertama, itu tidak ditampilkan pada rendering, tetapi pada kenyataannya di dalam robot ada kekacauan dari kabel (foto terlampir).
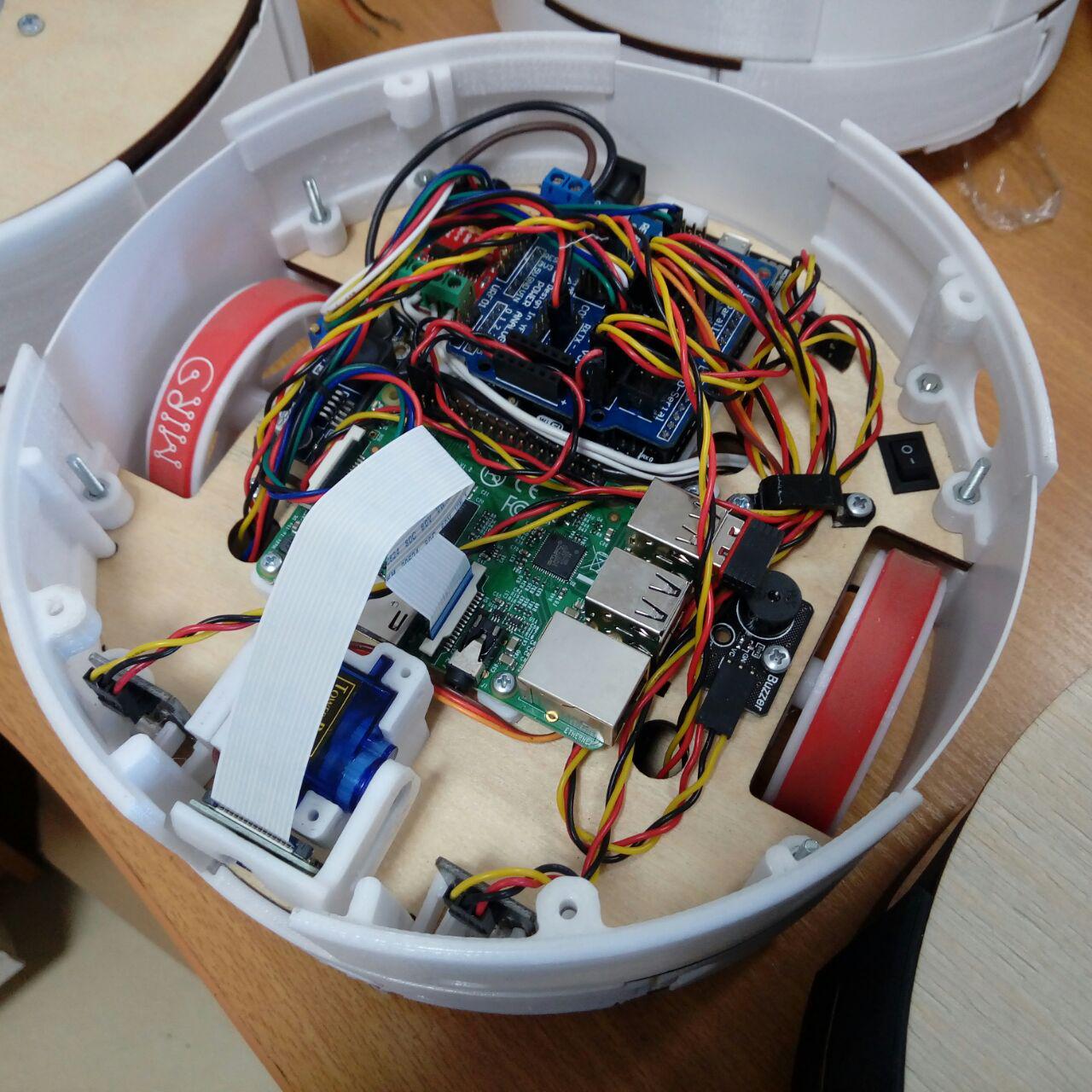
Kami merapikannya sedikit dengan klip hitam di sebelah kanan, dipasang di lubang yang sama untuk memasang motor kiri, tetapi masih kacau. Kita harus berurusan dengan ini.
Kedua, dan ini adalah tugas yang terkait dengan yang pertama, modul-modul sekarang terhubung dengan agak buruk - kabel-kabel mengalir melalui lubang-lubang teknologi di platform pusat dan rumah modul dan dari kedua ujungnya pas pada konektor pin (dalam kasus modul belakang, baterai terhubung ke konektor kawin pada kawat). Ini tentu tidak indah.
Dan di sini sepertinya Anda tidak beristirahat, tetapi satu-satunya solusi menunjukkan sendiri - Anda memerlukan motherboard Anda sendiri. Setidaknya murni untuk meneruskan output dari konektor switching modul di bawah platform pusat (di dalam "ayah" kasus, "ibu" menonjol dari modul) - sehingga modul adalah unit yang sepenuhnya terisolasi dengan antarmuka mekanis standar. Di sini kami berencana untuk melakukan ini. Pada prinsipnya, papan pasti akan memiliki tidak lebih dari dua lapisan, sehingga semua orang akan dapat memenuhinya di rumah. Dan kami punya mesin.
Enam bulan lalu, saya membuat video yang menggambarkan proses perakitan. Sejak itu, desainnya agak berubah. Yang paling penting, kami meninggalkan kompartemen sentral bawah untuk baterai - lokasinya tanpa pengisian modul belakang yang efisien menyebabkan stabilitas robot tidak memadai selama pengereman. Ergonomi telah sedikit ditingkatkan, detail telah difasilitasi. Tetapi perubahan mendasar lainnya tidak dibuat. Karena itu, video ini menggambarkan dengan baik perangkat robot. Dan hal-hal baru belum menjadi prioritas, terutama karena mesin animasi di Fusion 360 adalah kereta.
Saya melihat pertanyaan mengapa tidak segera mencetak kasus ini dengan semua bagian dinding eksternal dan platform pusat sebagai satu bagian yang tidak terpisahkan? Ini adalah keputusan yang sulit - untuk memungkinkan pemilik printer membuat robot, dengan ukuran dan panjang meja kurang dari 205 mm. Diameter robot hanya 201 mm. Tentu saja, saat ini sebagian besar printer murah sekalipun memiliki meja di bawah 300 mm, tetapi pengguna memiliki banyak printer dengan area cetak yang jauh lebih kecil.
Tetapi detail untuk mencetak pada printer besar sudah siap dan akan diterbitkan dalam waktu dekat - kami menggunakannya untuk membuat model utama untuk casting dalam silikon.
Repositori juga berisi sekumpulan komponen untuk dicetak dalam format STL dengan ketebalan lapisan 0,2 mm dengan penyangga yang siap dilepas (folder STLwSUPPORTS). Matikan semua dukungan di slicer dan cukup cetak pada bidang yang benar. Di mana bidang "kanan" akan membantu menentukan dokumen MIRO PARTS LIST & MANUFACTURING (dari repositori yang sama), di mana semua bagian digambarkan dalam tampilan isometrik dari atas / samping seolah-olah mereka berbaring di meja cetak.
Yah, saya harap kurang lebih diuraikan. Saya menghilangkan beberapa hal kecil, seperti bagian individual dari modul panduan dan dudukan kamera. Jika ada tempat aneh - tulis, saya akan menyesuaikan. Diskusi yang konstruktif selalu menyenangkan.
Pada bagian selanjutnya, kita akan menganalisis perangkat lunak di sisi ESP8266.