Kisah saya adalah tenggelam dalam studi tentang robotika dan pembuatan robot menggunakan printer 3d. Kesalahan yang saya temui dan apa yang ingin saya terima sebagai hasilnya
Latar belakang
Sekitar 10 tahun yang lalu, dalam kursus pertama di universitas, belajar tentang keberadaan Arduino dan belajar cara memesan barang dari China, saya memesan sendiri starter kit Arduino Mega dan mulai, seperti orang lain, belajar mengedipkan LED. Saya mendapatkan kesenangan liar dari kenyataan bahwa saya tidak hanya dapat memprogram dan mendapatkan beberapa solusi di layar komputer, tetapi saya dapat membuat beberapa perangkat yang dapat membuat hidup saya lebih mudah. Saya mulai berpikir tentang IOT sebelum saya belajar tentang konsep seperti itu dan dari waktu ke waktu saya berpikir untuk mengimplementasikan hal-hal yang bermanfaat. Proyek pertama di Arduino, yang saya anggap selesai untuk saya sendiri, adalah pengontrol untuk terarium dengan laba-laba. Layar, beberapa tombol untuk kontrol, sensor suhu dan kelembaban DHT11, otomatisasi lampu latar, pemanasan dengan kabel inkubator dan semuanya. Saya sudah memiliki pengalaman bekerja dengan pascal di sekolah, saya suka pemrograman, tetapi saya tidak ingin menghubungkan kehidupan dengannya secara langsung, itu membosankan bagi saya, dan saya jelas pergi untuk belajar di bidang teknik khusus, atau lebih tepatnya, Teknologi Desain Informasi di NTU "KhPI" .
Mereka menjanjikan arahan yang sangat maju, teknologi canggih, memberi tahu seberapa banyak spesialis seperti itu dalam permintaan dan terpikat dengan gambar perhitungan yang cerah di Ansys, Solidworks dan sistem perangkat lunak lainnya. Bahkan, sekarang, 6 tahun setelah lulus, saya dapat mengatakan bahwa saya tidak menyesal sedikit pun bahwa saya memilih arah ini untuk diri saya sendiri. Banyak hal, tentu saja, tidak seperti yang dijelaskan pada saat masuk, tetapi pada tahun ke-3 saya tetap menunggu barang yang saya sukai. Saya menjadi tertarik mempelajari sistem CAD, di salah satu Olimpiade saya menerima sertifikat CSWA dari Solidworks, tanpa melelahkan sama sekali dan tidak bersiap untuk ini. Tetapi setelah lulus, saya menerima tawaran tanpa pengalaman dan pengetahuan khusus dalam pemrograman untuk posisi pengembang .NET untuk proyek yang terkait dengan integrasi plugin di Solidworks. Kemudian 6 tahun bekerja dengan .NET di beberapa perusahaan dengan arah yang berbeda, upaya untuk bekerja jarak jauh dengan cryptocurrency, dll. tapi itu semua tidak membuatku senang. Dari waktu ke waktu, saya menyadari bahwa saya menyukai proses otomatisasi proses sehari-hari, tetapi saya tidak bisa memikirkan apa pun untuk melakukannya, tidak hanya untuk bermain, tetapi sesuatu yang nyata dan bermanfaat. Tahun demi tahun berlalu, universitas terus berjalan selama beberapa tahun, tidak ada waktu luang, tetapi entah bagaimana, pada malam perbaikan, saya memutuskan bahwa kesempatan ini adalah untuk menerapkan pengetahuan saya dan mencoba melakukan sesuatu yang sangat berguna, dan saya mulai mengembangkan rumah pintar. Dia menyegarkan sedikit pengetahuan tentang situasi saat ini di mikrokontroler di dunia, belajar tentang keberadaan ESP8266 dengan Wifi di papan, startup Blynk yang dulu-Ukraina, yang memungkinkan untuk mendapatkan aplikasi kondisional gratis untuk mengendalikan perangkat dari telepon, tanpa pengalaman dan pengetahuan tentang mengembangkan perangkat lunak untuk ponsel. Beberapa bulan kemudian saya menerima prototipe yang dipasang di papan tempat memotong roti, tetapi itu bekerja dengan stabil. Untuk pertama kalinya, untuk pengujian, saya meninggalkannya dalam bentuk modul yang dimasukkan ke dalam kotak distribusi. Saya ingin menulis bahwa setelah tes dalam kondisi nyata saya menyebar papan dan mengumpulkan semuanya dengan baik, tapi tidak, untuk tahun ketiga semuanya telah bekerja secara stabil, jadi saya tidak mencoba untuk mengulang apa pun. Dari apa yang bermanfaat bagi saya dalam hal ini, saya mendapatkan semua orang kesempatan untuk menghemat listrik secara otomatis, termasuk konsumen utama seperti ketel, mesin pencuci piring, mesin cuci dengan tarif malam. Memantau suhu di setiap kamar dan, karenanya, mengendalikan pemanasan di setiap kamar. Di sana ia juga menerapkan pengontrol untuk pemanas di bawah lantai dan penerangan jalan. 3 tahun yang lalu, seluruh solusi ini harganya sekitar $ 50, mengingat fakta bahwa itu hanya biaya controller normal untuk lantai yang hangat. 3 tahun pengoperasian seluruh sistem ini memberi saya keyakinan bahwa mikrokontroler benar-benar dapat digunakan untuk pengembangan dan mereka dapat bekerja secara stabil.
Upaya pertama untuk membangun robot
Beberapa tahun yang lalu, saya masih memutuskan dan mengalokasikan anggaran untuk hobi dengan membeli printer 3D. Klon kayu lapis Ultimaker segera mulai diselesaikan dengan tangan, pintu dan kotak akrilik selesai untuk mencetak ABS, dan saya mulai memahami bahwa dengan printer itu sudah mungkin untuk mengembangkan sesuatu yang lebih serius, dapat dipindahkan dan menarik bagi saya. Teringat dari siaran masa kecil di televisi dengan pertempuran robot, saya memutuskan, mengapa tidak menjadikan diri Anda sesuatu yang menarik. Saya pergi ke festival robotika, semakin bersemangat dengan ide ini. Saya mulai menonton proyek robot di thingiverse dan menyadari bahwa ini semua salah, perkembangan orang lain kebanyakan membosankan dan biasa saja, kurangnya kode sumber dan masih "YAGENZHENER". Saya menginginkan sesuatu dengan mekanik yang tidak biasa, dan bukan hanya wheelbase. Saya ingin menerapkan mekanik yang mirip dengan robot saat memuat Solidworks.
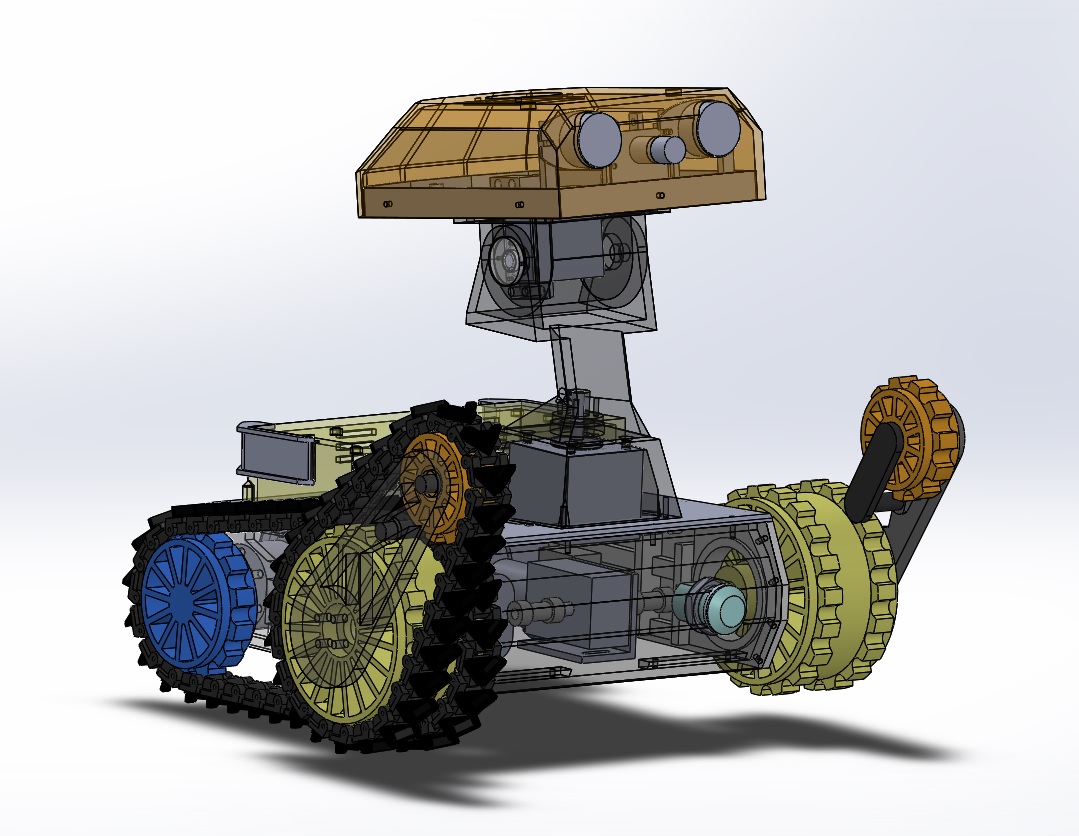
 Robot yang sama itu menjadi salah satu inspirator
Robot yang sama itu menjadi salah satu inspiratorSaya melihat desain yang sama, memahami prinsip kerja dan mengingat ide untuk melakukan sesuatu yang serupa. Kesalahan besar pertama adalah keputusan bahwa semuanya sederhana, saya akan secara bertahap memodelkan, mencetak dan memeriksa desain yang sudah jadi, tidak memiliki pemahaman lengkap tentang apa dan bagaimana akan diatur, bagaimana akan dikelola, modul mana yang akan digunakan. Betapa salahnya saya. Awalnya, saya mengerti bahwa robot akan dibuat "lebih besar", saya berencana pada robot ini untuk menggunakan semua jenis pengenalan objek menggunakan OpenCV, semacam navigasi, parkir otomatis untuk pengisian daya, Anda tidak akan mengelola satu ESP di sana. Awalnya, idenya diletakkan untuk menggunakan ESP32 untuk bekerja dengan mekanik dan RaspberryPi3 untuk bekerja dengan logika, kamera, suara, dll. Salah satu syarat yang diperlukan bagi saya adalah pengisian ulang otomatis, jadi saya harus memikirkan cara menjual daya. Karena saya tidak memiliki banyak pengalaman dengan teknik elektronik / elektro, pada awalnya saya mencoba menggunakan kemiripan Powerbank dengan kemampuan untuk bekerja dalam mode UPS. Bekerja dari baterai (dalam kasus saya, 8 elemen 18650) ketika tidak ada daya eksternal dan mengisi ulang elemen yang sama dan bekerja dari listrik ketika robot memarkir untuk pengisian daya. Secara umum, ada banyak upaya untuk menyatukan semuanya dan membuatnya berfungsi, tetapi saya menyadari bahwa saya perlu mempelajari materi atau mencari bantuan. Karena perubahan konstan pada semua modul dan papan, semuanya tidak lagi sesuai dengan tubuh robot dan pada titik tertentu saya menyadari bahwa sudah waktunya untuk mengulang semuanya.
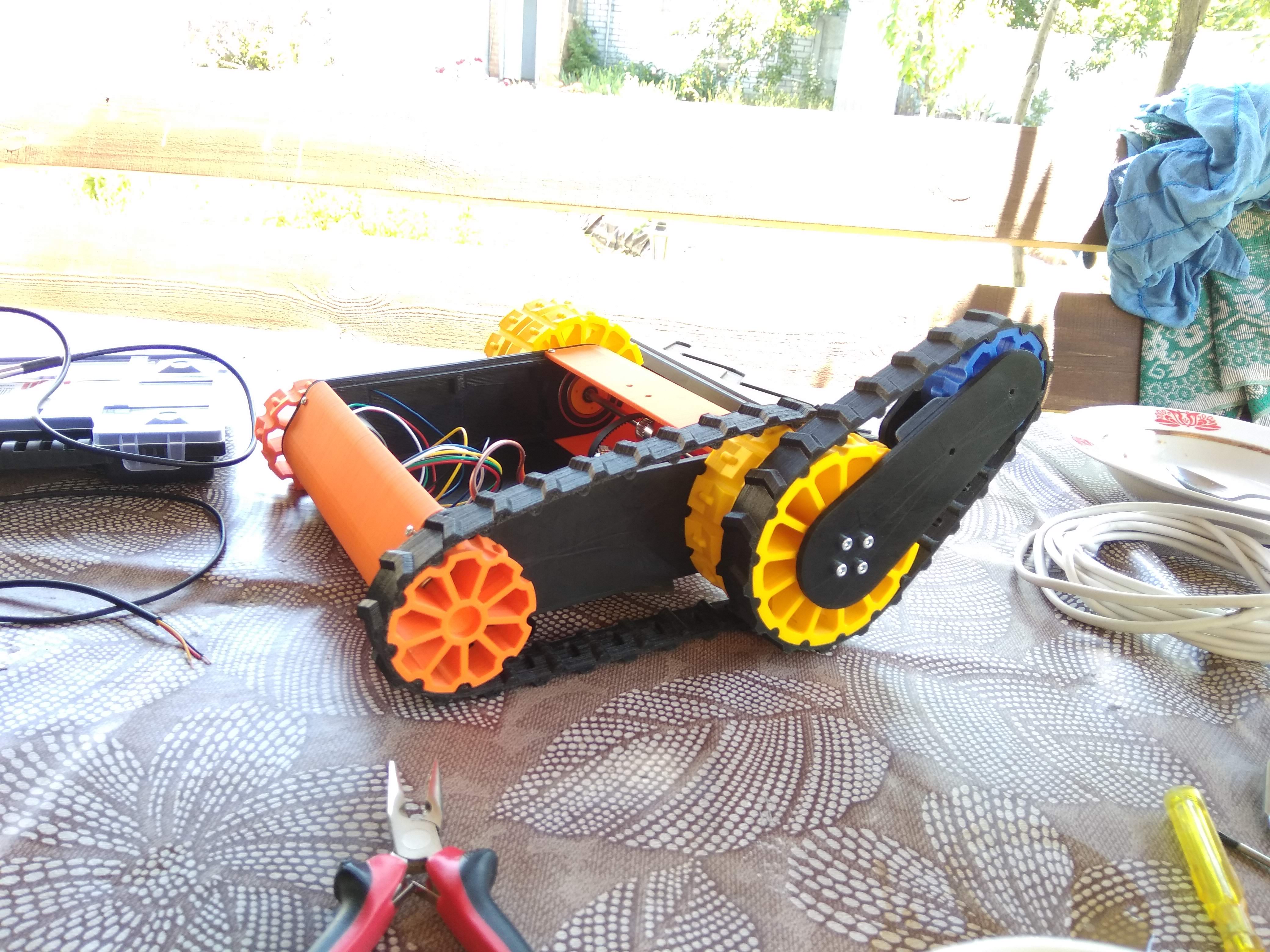 Versi pertama dari desain dengan trek yang dicetak dengan satu sabuk dan servo untuk memutar bagian depan trek
Versi pertama dari desain dengan trek yang dicetak dengan satu sabuk dan servo untuk memutar bagian depan trekPekerjaan pertama pada bug
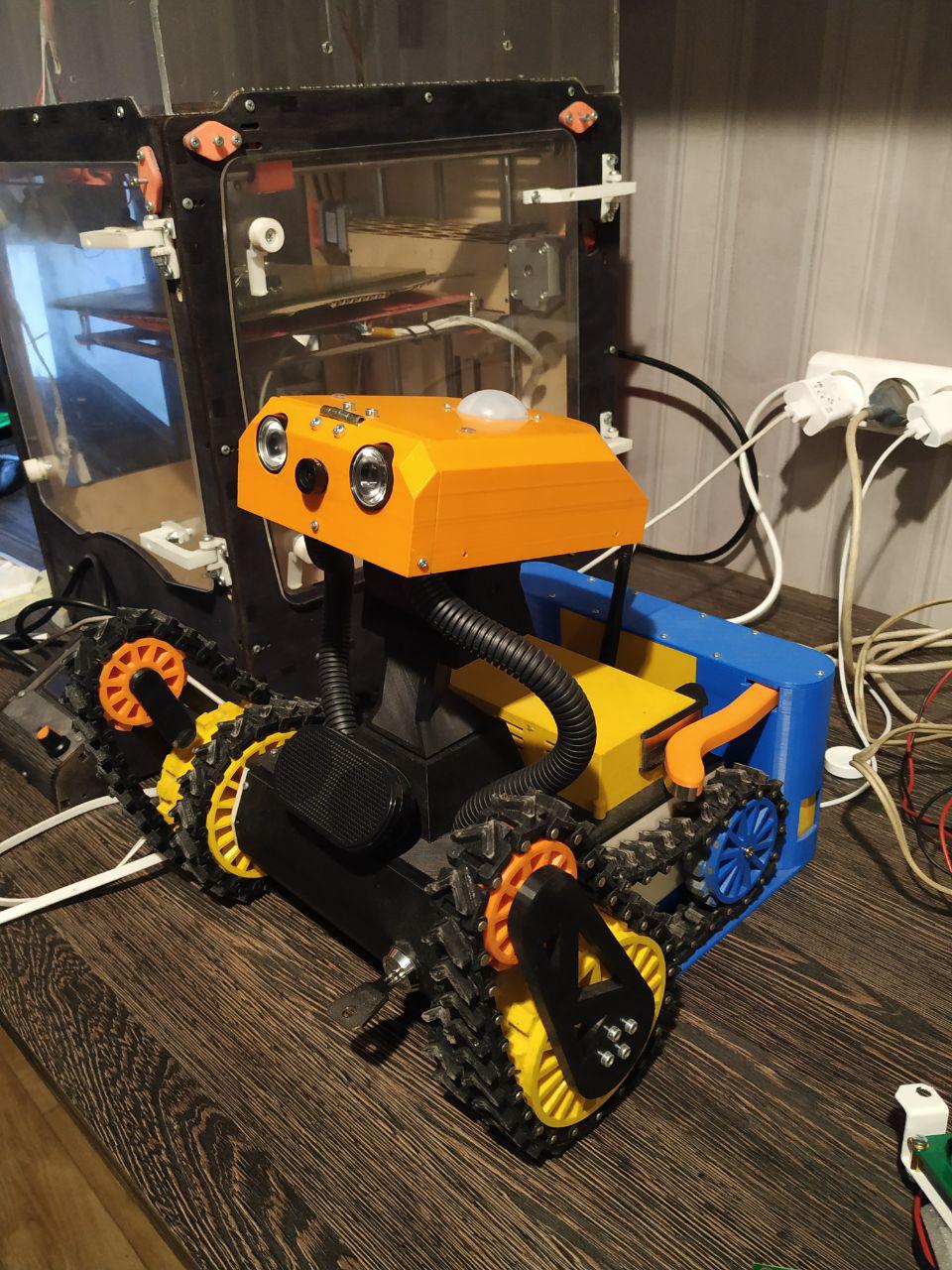
Setelah berpartisipasi dalam webinar robotika, saya bertemu seseorang yang mengembangkan papan sirkuit dan memutuskan sendiri bahwa akan lebih mudah bagi saya untuk membuat sketsa semacam spesifikasi teknis dan mendapatkan semacam solusi dari seseorang yang mengetahui desain papan dan pengembangan perangkat. Pada saat yang sama, saya mulai mengerjakan sebuah bangunan baru tentang melihat tiang pintu saya terakhir kali. Dan di sini sekali lagi saya menginjak menyapu yang sama sampai akhir tanpa memahami seperti apa semua elektronik itu, dimensi apa yang akan dimilikinya dan bagaimana saya akan menempatkan semuanya. Kami membahas bahwa ini akan menjadi solusi modular, saya punya beberapa papan, misalnya, driver mesin, baterai, dan saya mulai mensimulasikan ulang proyek, tetapi sudah sepenuhnya menggambar setiap papan dengan lubang pemasangan, outlet kawat, radiator, dll. agar tidak mengalami masalah kurangnya ruang lagi. Bahkan, saya dibatasi oleh ukuran area pencetakan hingga 200 * 200 * 200mm, dan saya mencoba membuat versi case ini dari satu bagian, yang membutuhkan sekitar 400 g plastik dan beberapa hari untuk mencetak.
Setelah beberapa upaya dengan retakan muncul pada hari kedua, terlepas dari meja, saya menyadari bahwa bangunan prefabrikasi bukanlah ide yang buruk. Proses pengerjaan ulang beberapa bagian akan memakan waktu lebih sedikit dan masalah dengan printer akan jauh lebih sedikit. Setelah menerima satu set papan bercerai dengan semua keinginan saya dari waktu ke waktu, saya belajar untuk bekerja dengan register geser, multiplexer, dan setidaknya entah bagaimana mulai memahami sirkuit dan perangkat yang tidak dapat dipahami oleh saya. Pada saat itu, saya sekali lagi sepenuhnya memperbaiki mekanisme. Dia mengubah prinsip rotasi "cakar" depan dari servo ke motor worm gear.Ia meninggalkan ide mencetak sabuk untuk ulat dari elastane seperti karet dan mengubahnya menjadi trek plastik prefabrikasi yang dirakit pada paku dan menempelkannya dengan tapak elastane. Awalnya, sistem ventilasi dipikirkan, yang mengambil udara dari belakang dari belakang robot, melalui sistem ventilasi melewati semua papan, tabung di mana kabel-kabel dijalin ke "kepala" dan meniupkan udara panas keluar dari itu. Dan sistem ventilasi ini bahkan bekerja pada titik waktu tertentu, tetapi kemudian semuanya dibangun kembali, jadi lebih mudah bagi saya untuk mencetak penutup dengan banyak slot dan ventilasi pasif.
Apa yang ada saat ini
Pada akhir pekan di Dnepr, festival teknis Interpipe TechFest diadakan, di mana saya memutuskan untuk menunjukkan kepada orang-orang apa yang saya miliki sekarang, mendengarkan pendapat orang lain dan berbicara dengan odnodumtsami. Di sana saya sekali lagi mendengar bahwa mungkin untuk menulis di suatu tempat, misalnya, tentang Habré dan mendapatkan umpan balik dari orang-orang.
Bahkan, bagi saya itu adalah platform tempat saya akan belajar bekerja dengan ROS, mencoba menavigasi di ruang angkasa, membangun kembali hukuman, mencoba bekerja dengan lidar solid-state, yang saya tunggu dari kickstarter, saya ingin mengacaukan sesuatu seperti kamera stereo realsense. Saya mengerti bahwa otak raspberry mungkin tidak akan cukup bagi saya dan seiring waktu saya akan beralih ke sesuatu yang lebih kuat.
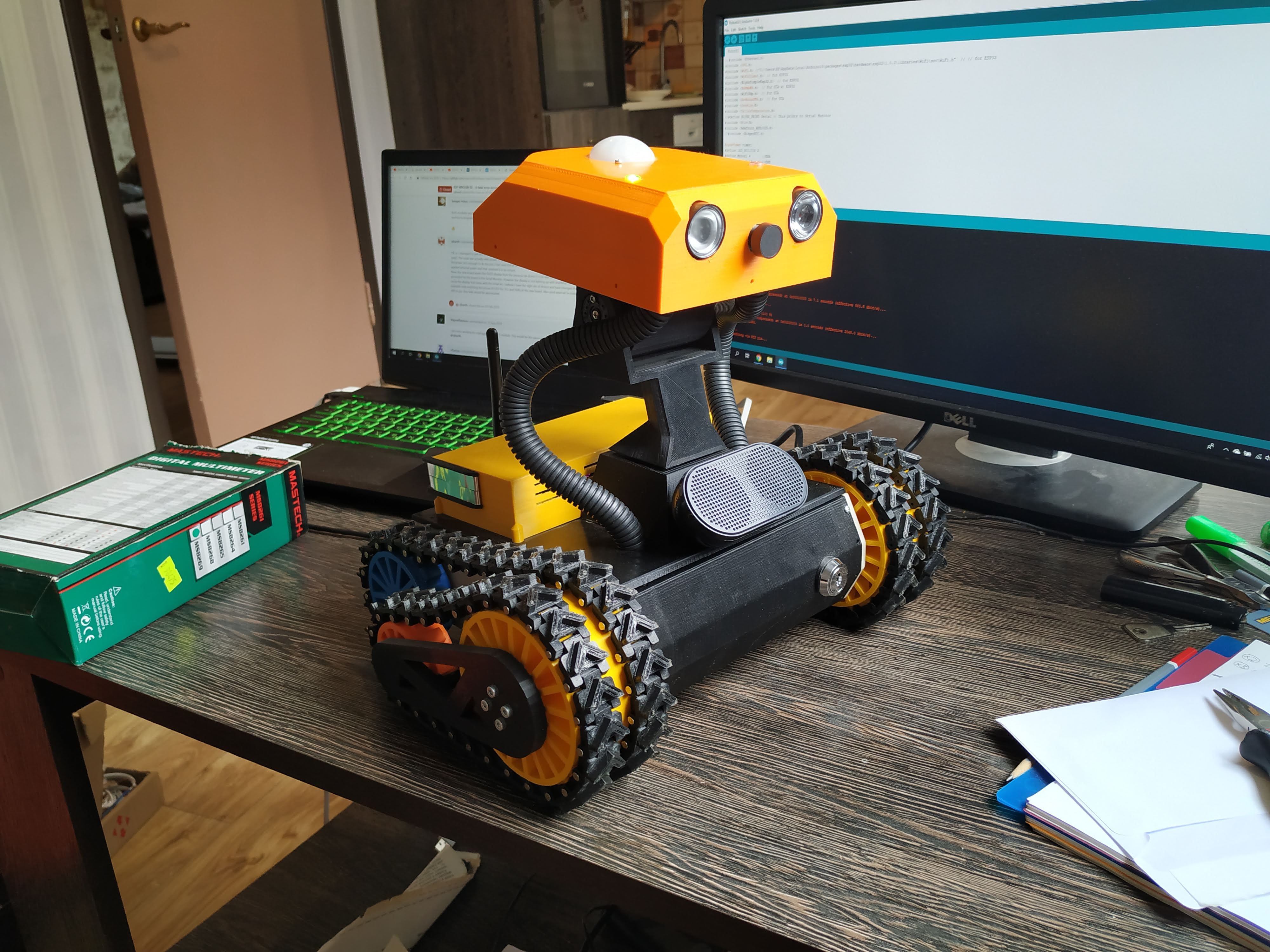
Sekarang robot ini dapat digunakan sebagai "penjaga rumah". Sementara manajemen diatur melalui semua aplikasi Blynk yang sama. Itu dilengkapi dengan sensor gerak kubah, kamera dengan kemampuan untuk menghidupkan / mematikan filter IR, penerangan IR. Setelah mengaktifkan mode perlindungan dari telepon, saya mendapat pemberitahuan di telepon. Saya dapat mengaktifkan RaspberryPi 3, mulai streaming, streaming + perekaman video, mengambil foto yang dikirim ke email saya. Saya dapat melihat apa yang terjadi di rumah dan kembali ke stasiun pengisian daya.
Baterai 4s2p yang dirakit sendiri dari modul 18650 pada 3200mAh masing-masing memberi saya sekitar 8 jam mengemudi tanpa mengisi ulang dengan semua peralatan dihidupkan dan mentransmisikan video dan tanpa optimasi penghematan energi. Sejauh ini, tangan belum mencapai ini. Menggunakan Google TextToSpeach, menulis di terminal aplikasi ini, robot membaca teks. Dan itu semua dari mana saja di dunia di mana saya memiliki koneksi internet.
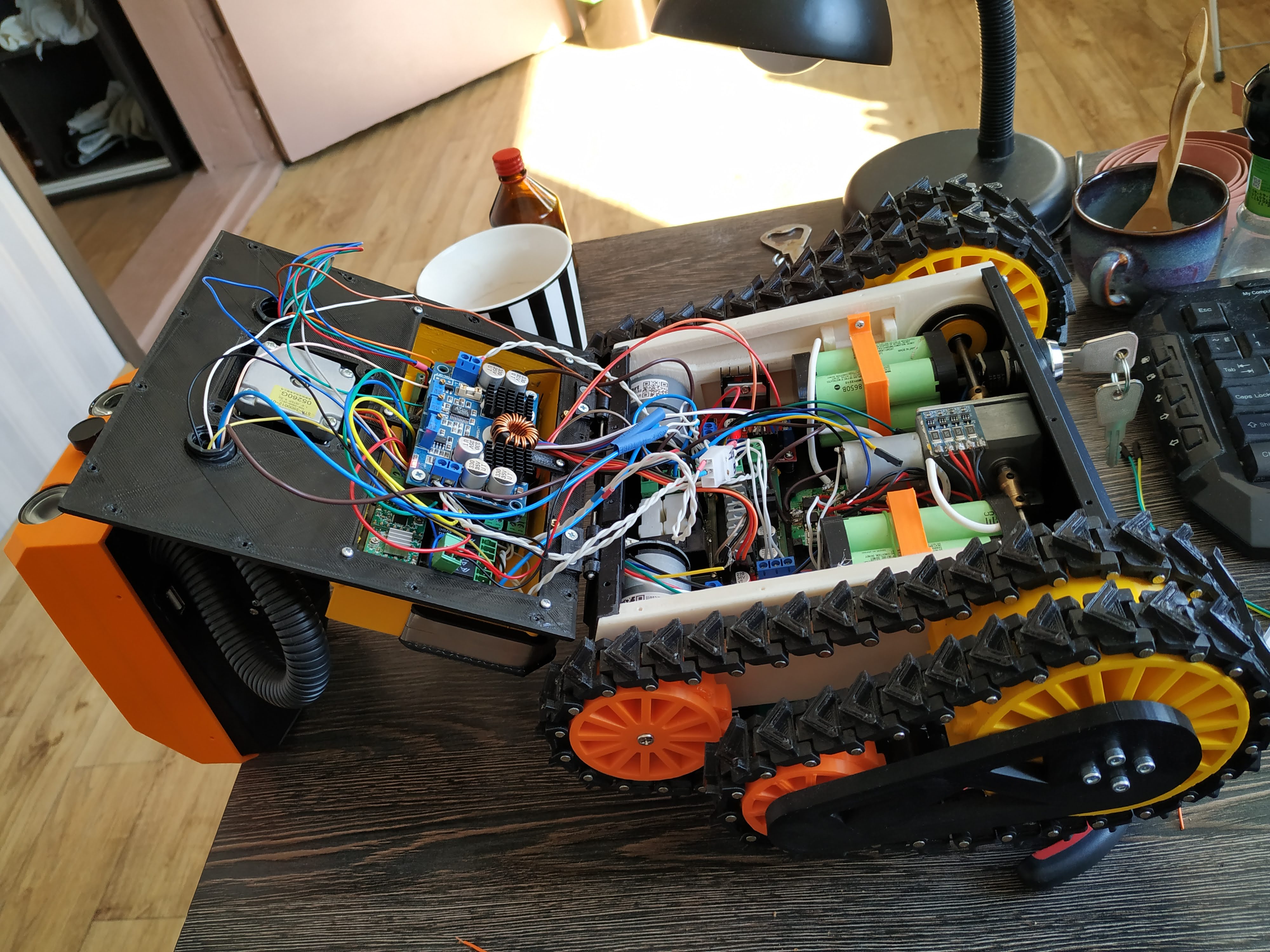 Sedikit timah di dalamnya
Sedikit timah di dalamnya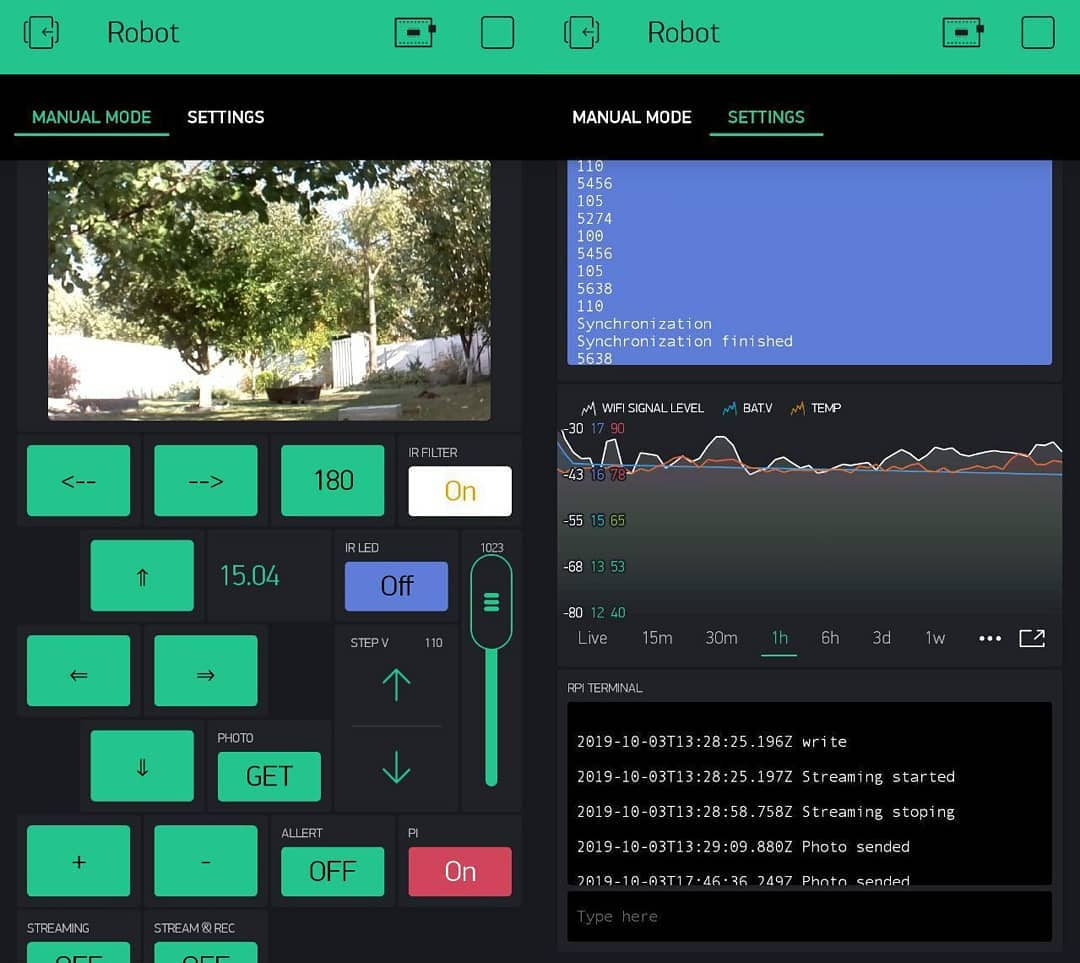 Ini adalah bagaimana kontrol UI pada ponsel
Ini adalah bagaimana kontrol UI pada ponselApa selanjutnya dan mengapa saya menulis semua ini
Secara umum, tujuan mengunjungi pameran adalah untuk menemukan kenalan baru dengan odnodumtsami, siap untuk mulai melakukan sesuatu yang berkaitan dengan robot. Saya lelah bekerja hanya sebagai programmer, menulis aplikasi desktop, ini tidak sekeren kelihatannya dan saya pikir arah ini sedikit demi sedikit berubah. Alih-alih belajar sendiri untuk pengembangan WEB, saya memutuskan untuk secara radikal mengubah arah dan menghubungkan hidup saya dengan robot dan IOT, yang sangat saya sukai. Bagi saya sendiri, saya memutuskan bahwa ketika bekerja di tempat kerja yang tidak berhubungan dengan bidang ini, saya tidak punya cukup waktu. Saya harus memilih antara apa yang saya butuhkan dan apa yang saya sukai dan inginkan, saya menabung uang, meninggalkan pekerjaan dan mulai mempelajari semua ini.
Saya punya beberapa ide tentang topik robotika, yang utamanya terkait dengan pertanian, berdasarkan visi komputer, peta kedalaman, pengenalan objek, dll. Saya mengerti bahwa ada banyak pekerjaan dan sekarang saya baru saja mulai berurusan dengan ROS. Saya memiliki pengetahuan di bidang teknik, kemampuan untuk bekerja dengan sistem CAD / CAE dan, pada prinsipnya, dapat benar-benar melakukan semuanya sendiri, tetapi memahami berapa banyak pekerjaan yang harus dilakukan pada mekanik, pengembangan, kesalahan perhitungan dan sepenuhnya belajar cara bekerja dengan ROS, peta kedalaman, sensor, orientasi spasial dan membawa semuanya ke pikiran akan sangat sulit. Karena itu, saya mencari beberapa orang. yang siap untuk secara serius terlibat dalam pekerjaan di startup ini dan menjadi salah satu pendiri. Tentu saja, saya tidak bisa menjanjikan bahwa semuanya akan keren dan dalam setengah tahun startup kami akan menghasilkan banyak uang, tetapi sampai ceruk ini penuh, Anda dapat mencoba menerapkan sesuatu pada tingkat prototipe pertama dan pergi ke akselerator, platform crowdfunding dan itu entah bagaimana beriklan sendiri.
Saya juga siap untuk mempertimbangkan proposal ke arah ini. Saya siap bekerja dengan seseorang di startup seseorang, atau tidak harus startup, tetapi hanya pengembangan beberapa perusahaan, tetapi dalam arah yang menarik bagi saya.
Oleh karena itu, saya ingin mendengar komentar tentang hal ini. Mungkin, setelah semua, ini akan menarik minat seseorang. Saya sendiri tinggal di kota Dnepr, Ukraina. Oleh karena itu, akan lebih tepat untuk mengerjakan satu proyek dalam jarak relatif, meskipun dalam ratusan kilometer daripada ribuan, semua opsi dipertimbangkan.
Jika ada pertanyaan tentang perangkat robot yang saya berikan, saya siap menjawab dan berdiskusi. Juga di halaman Facebook ada beberapa video robot dan mengatasi rintangannya
Jika ada, Anda selalu dapat menemukan saya di sini di
facebook atau menulis saya di marchenko.andrii@gmail.com