
Pada bulan Agustus 1913, Peter Nesterov melakukan salah satu manuver paling menarik, berbahaya, dan rumit dalam penerbangan - lingkaran mati. Pada saat itu, terutama mengingat teknologi saat itu, dan sekarang ini adalah aerobatik yang nyata. Banyak profesional dan amatir modern dari bidang penerbangan akan memberikan segalanya untuk dibicarakan dengan Nesterov. Sayangnya, ini tidak mungkin, tetapi kartu As aerobatik lainnya sering tinggal bersama kita dan sering mengganggu kita. Sebagai aturan, kita tidak memperhatikan mereka, atau berkeliling apartemen dengan sandal atau koran, karena bagi kita mereka adalah hama, pembawa infeksi apa pun dan hanya selebaran yang mengganggu. Tetapi bagi para ilmuwan, makhluk-makhluk ini adalah penjaga rahasia penerbangan dan pendaratan. Hari ini kami akan bertemu dengan Anda sebuah studi luar biasa tentang kemampuan lalat biasa untuk mendarat terbalik di permukaan apa pun. Mekanisme pendaratan apa yang digunakan lalat, proses apa yang dikandungnya, dan seberapa sulitkah mengimplementasikannya secara buatan dalam robotika? Kami belajar tentang ini dari laporan kelompok penelitian. Ayo pergi.
Dasar studi
Tentu saja, Anda tidak dapat memberikan semua keunggulan dalam terbang ke lalat, karena banyak serangga lain juga memiliki kemampuan unik mereka di bidang penerbangan dan pendaratan. Namun, lalat, seolah-olah, mengumpulkan dalam diri mereka sendiri jumlah maksimum keterampilan yang secara langsung berkaitan dengan anatomi mereka.
 Penampilan lalat spesies Calliphora vomitoria.
Penampilan lalat spesies Calliphora vomitoria.Dalam penelitian ini, peran utama dimainkan oleh lalat spesies
Calliphora vomitoria (lalat biru). Spesies ini dapat ditemukan di hampir setiap sudut planet ini: dari Amerika Selatan hingga Asia Timur. Dimensi lalat ini cukup mengesankan, panjangnya 10-14 mm, yang kira-kira dua kali lebih besar dari lalat rumah biasa (
Musca domestica ). Secara eksternal,
Calliphora vomitoria dapat dibedakan dari kerabatnya oleh perut biru, berkat yang juga disebut "
lalat bluebottle ", mengisyaratkan kemiripan dengan warna gelas botol biru.
Selain perbedaan eksternal dari lalat rumah,
Calliphora vomitoria juga memiliki lalat perilaku. Lalat biru lebih suka terbang dalam gerombolan kecil daripada sendirian, yang memungkinkan mereka untuk dengan cepat menemukan makanan (biasanya ini adalah nektar bunga yang sangat berbau). Ketika satu individu dari kawanan menemukan makanan, ia mengeluarkan feromon khusus, menandakan penemuan itu kepada orang lain.
Orang sering menggunakan larva lalat biru sebagai umpan selama memancing, tetapi untuk serangga ini bukan yang paling unik dan, pada kenyataannya, bukan aplikasi yang paling layak. Tidak hanya nelayan yang mendapat bantuan dari lalat biru, tetapi juga forensik. Lalat, seperti yang kita tahu, tidak mudah tersinggung, karena bangkai binatang dan manusia tidak membuat mereka takut, tetapi justru menarik mereka. Untuk para ahli forensik, ini adalah kriteria tambahan untuk memperkirakan waktu kematian, karena lalat biru memiliki hubungan yang sangat jelas antara tingkat pertumbuhan larva mereka dan suhu sekitar. Mengetahui suhu, dimungkinkan untuk menentukan dari larva saat telur diletakkan.
Tetapi hari ini kita tidak akan berbicara tentang forensik, tetapi tentang penerbangan. Studi fit terbalik, mis. Mendarat di langit-langit, sebagaimana para ilmuwan menyebutnya, telah dilakukan sebelumnya, tetapi tidak secara mendetail. Namun, beberapa nuansa menarik ditemukan. Selama pengamatan pendaratan terbalik lalat rumah, para ilmuwan memperhatikan bahwa mereka membuat gerakan rotasi "setengah lingkaran" sebelum kontak cakar
ipsilateral * dengan permukaan.
Ipsilateral * - terletak di sisi yang sama (berlebihan, lengan kiri seseorang adalah ipsilateral sehubungan dengan kaki kiri).
Setelah gerakan ini, osilasi lateral tubuh dengan bantuan kaki terjadi, yang menyebabkan kontak kaki yang tersisa dengan permukaan. Manuver-manuver ini dan lainnya sebelum pendaratan yang sebenarnya, tentu saja, disebabkan oleh sensor, mis. sinyal visual, taktil dan lainnya yang diterima oleh lalat sebelum mendarat.
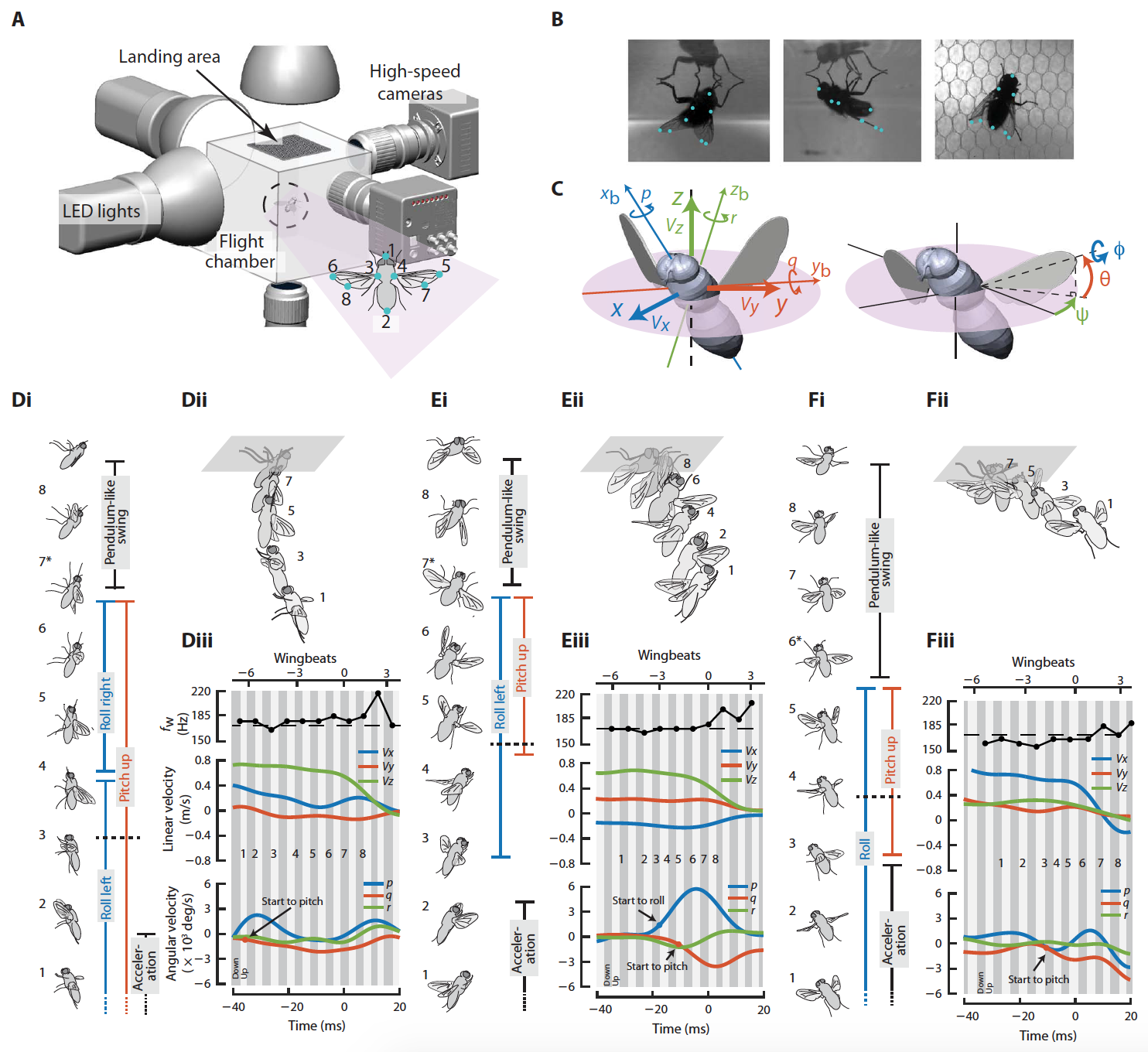
Dalam penelitian kami hari ini, para ilmuwan dari University of Pennsylvania melakukan serangkaian pengamatan pendaratan lalat biru di permukaan terbalik di ruang terbang (di terowongan angin) menggunakan video kecepatan tinggi (
1A ).
 Gambar No. 1
Gambar No. 1Kinematika tubuh dan sayap lalat diperoleh dengan mendigitalkan label anatomi (
1B dan
1C ).
Hasil Pengamatan
Pertama-tama, para ilmuwan memutuskan untuk mengisolasi dan menganalisis aspek perilaku pendaratan yang sukses.
Mereka mencatat bahwa lalat buah mendarat di permukaan vertikal melalui perlambatan berkelanjutan dan sedikit rotasi tubuh sebelum tanam. Tetapi lalat biru saat mendarat menunjukkan segera 4 aspek perilaku berturut-turut: akselerasi vertikal, manuver rotasi seluruh tubuh, ekstensi kaki dan goyangan seluruh tubuh dengan kaki depan yang stabil di permukaan. Durasi seluruh proses pendaratan yang berhasil adalah sekitar 4-8 tumbukan sayap menurut 18 pengamatan, sedangkan frekuensi tumbukan sayap rata-rata adalah 172,7 ± 7,7 Hz.
Selama pendaratan yang berhasil, para ilmuwan juga mengamati perubahan kinematik yang signifikan dalam sumbu rotasi, nilai-nilai manuver rotasi, dan tingkat goyang tubuh akibat cakar.
Setelah mengumpulkan semua pengamatan, para ilmuwan mengidentifikasi strategi utama selama pendaratan, yang diklasifikasikan sebagai berikut: dominan di
pitch * , dominan di
roll * , dikombinasikan dan dominan di goyangan lateral / longitudinal.
Pitch * - gerakan sudut tubuh relatif terhadap sumbu melintang horizontal.
Roll * - rotasi tubuh di sekitar sumbu longitudinal.
Video # 1: mendarat dengan nada yang berlaku (sesuai dengan gambar 1D).Video No. 2: arahan dengan gulungan yang ada (sesuai dengan gambar 1E).Gambar
1D -
1F menunjukkan pola perilaku lalat biru selama pendaratan. Dalam dua contoh pertama, lalat menggunakan manuver rotasi cepat, terutama relatif terhadap sumbu pitch (
1D dan video No. 1) atau roll (
1E dan video No. 2), yang mengatur tubuh mereka sebelum mendarat dengan orientasi (perut) yang hampir terbalik.
Penjajaran cakar terjadi segera setelah dimulainya manuver rotasi (garis putus-putus horisontal hitam pada
1Di dan
1Ei ). Setelah cakar menyentuh permukaan, fase ayunan tubuh dimulai.
Sangat mengherankan bahwa kecepatan sudut rata-rata dari manuver rotasi mencapai sekitar 4000 ° / detik, dan nilai maksimumnya bisa melebihi 6000 ° / detik, yang secara signifikan lebih tinggi daripada lalat buah atau bahkan burung kolibri.
Video # 3: mendarat dengan getaran longitudinal tubuh yang berlaku (sesuai dengan gambar 1F).Pada versi ketiga, lalat mengandalkan hampir sepenuhnya pada goyangan tubuh menggunakan cakarnya (
1F dan video No. 3), dan manuver rotasi diabaikan.
Video # 4: mendarat dengan goyangan tubuh lateral yang berlaku.Dengan demikian, dibandingkan dengan dua opsi pertama, strategi pendaratan ini mungkin menggunakan lebih banyak proses mekanis dan struktural (mis.,
Adhesi * karena
pulvillas * atau
redaman * karena viskoelastisitas cakarnya), yang memfasilitasi transfer momentum linear tubuh ke momentum rotasi. .
Adhesi * - adhesi permukaan yang berbeda asal (misalnya, tetesan embun pada rumput).
Pulvilla * - bantalan lunak dari ujung kaki, yang masing-masing terletak di bawah cakarnya. Tugas utama pulvillas adalah menjaga serangga pada permukaan vertikal yang halus atau miring.
Redaman * - penindasan buatan getaran.
Langkah selanjutnya dalam penelitian ini adalah untuk mempelajari perbedaan kinematik antara pendaratan yang sukses dan yang tidak berhasil.
Video No. 5: pendaratan dengan mekanika roll-pitch gabungan.Pendaratan yang tidak berhasil termasuk yang berakhir dengan tabrakan dengan permukaan (yang bagi para ilmuwan data untuk analisis, kemudian untuk lalat gegar otak, tentu saja secara kiasan).
 Gambar No. 2
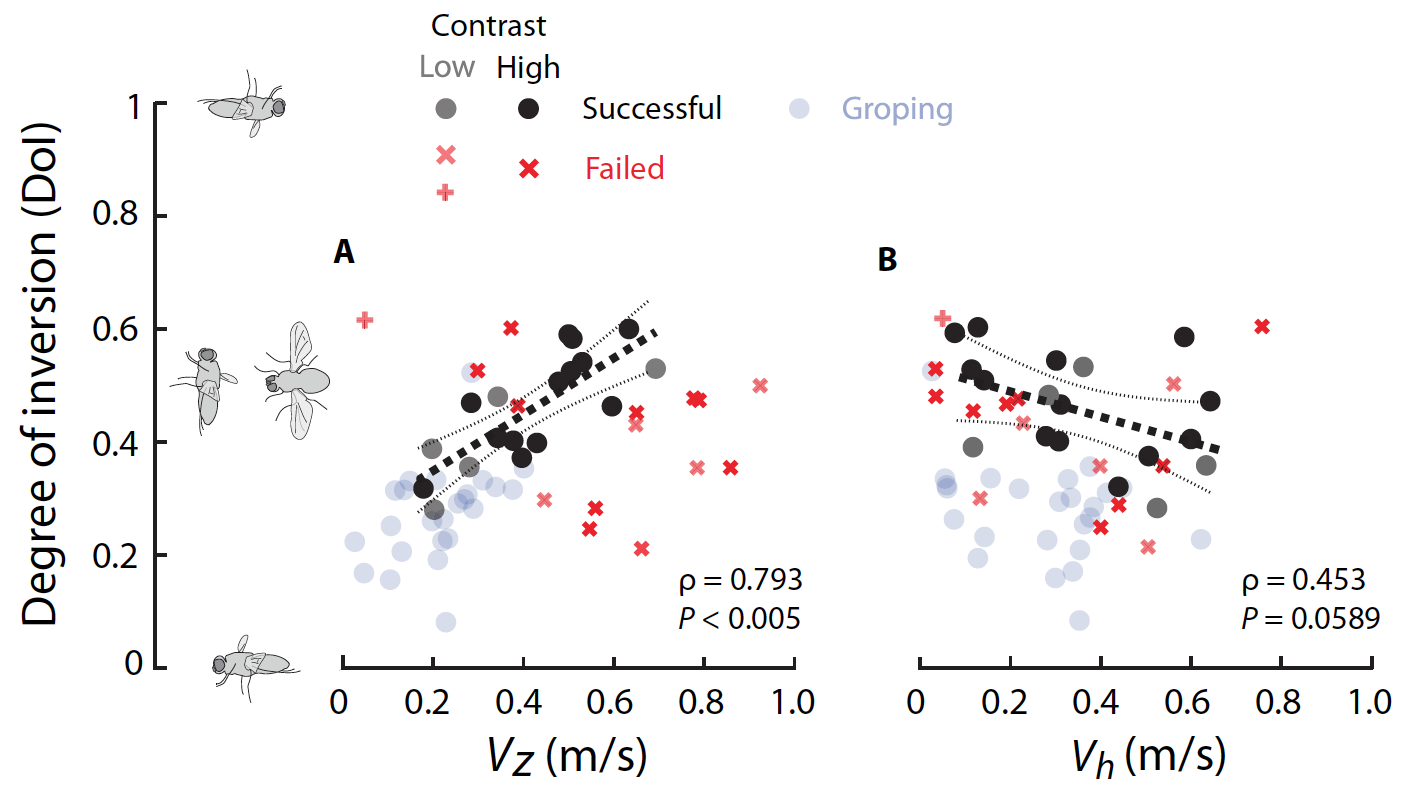
Gambar No. 2Untuk mengukur seberapa baik tubuh lalat diorientasikan, tingkat inversi (DoI dari
tingkat inversi ) dihitung, yang mengukur sejauh mana tubuh lalat disejajarkan dengan orientasinya yang sepenuhnya terbalik sebelum mendarat. DoI bervariasi dari 0, yang berarti tidak adanya inversi tubuh, yaitu perut ke bawah ke 1, yang berarti inversi dari seluruh tubuh, yaitu perut. Pada pendaratan yang sukses, DoI meningkat pada kecepatan vertikal (
2A ), tetapi menurun pada kecepatan longitudinal (
2B ).
Pengamatan ini menunjukkan bahwa lalat perlu berguling lebih banyak ketika kecepatan naik mereka lebih tinggi atau ketika kecepatan horizontal mereka lebih rendah. Di sebagian besar pendaratan yang gagal (total ada 15), lalat tidak terbalik sebelum saat pendaratan dibandingkan dengan posisi lalat yang membuat pendaratan yang berhasil.
Penyebab kegagalan bisa karena rotasi tubuh sebelum waktunya atau tidak mencukupi sebelum mendarat. Dengan demikian, lalat-lalat ini tidak dapat mendarat dengan baik di langit-langit, tetapi menabraknya.
Video # 7: gagal mendarat karena manuver rotasi terlalu dini.Selain itu, pendaratan yang tidak berhasil juga terjadi karena rotasi tubuh terlalu dini (video No. 7), karena inversi sebelumnya menyebabkan kecepatan vertikal yang tidak cukup yang diperlukan untuk mencapai langit-langit (ditandai dengan "+" pada grafik
2A dan
2B ).
Video No. 8: pendaratan yang gagal karena inversi tubuh yang lemah dengan pelurusan kaki yang tidak tepat waktu.Alasan lain untuk kegagalan, meskipun inversi dan kecepatan gerakan yang benar, adalah keterlambatan telapak kaki, yang menyebabkan lokasi yang salah dan, oleh karena itu, kontak permukaan dengan permukaan yang tidak cukup kuat (video No. 8).
Video # 6: contoh pendaratan kontak di langit-langit.Terlepas dari semua tusukan dan kekurangan, beberapa lalat masih bisa pulih dan mendarat dengan sukses menggunakan pendaratan kontak. Dalam hal ini, lalat terbang dengan kecepatan vertikal rendah di bawah langit-langit, kemudian mereka merasakan permukaan menggunakan cakar depan, dan kemudian mereka menempel dan mendarat (video No. 6).
Video # 9: pendaratan yang gagal karena inversi tubuh yang lemah dengan sedikit rotasi tubuh.Merangkum data yang diperoleh dari pengamatan, para ilmuwan sampai pada kesimpulan bahwa aspek kinematik pendaratan lalat mengandung proses saraf yang jauh lebih berbeda dari yang diperkirakan sebelumnya. Fitur yang paling mencolok adalah manuver rotasi. Tetap hanya untuk memahami apa yang memancingnya, atau lebih tepatnya sinyal apa yang mengarah pada fakta bahwa lalat menggunakannya untuk mendarat.
Yang pertama kali muncul di pikiran, tentu saja, adalah sinyal visual yang diterima lalat ketika mendekati langit-langit dengan kecepatan linier yang terdiri dari tiga komponen (
1C ): vertikal (
V z ), longitudinal (
V x ) dan lateral (
V y ).
 Gambar No. 3
Gambar No. 3Berkat karya pendahulunya, para peneliti secara akurat mengetahui tiga jenis isyarat visual yang diperlukan untuk mengevaluasi pergerakan lalat.
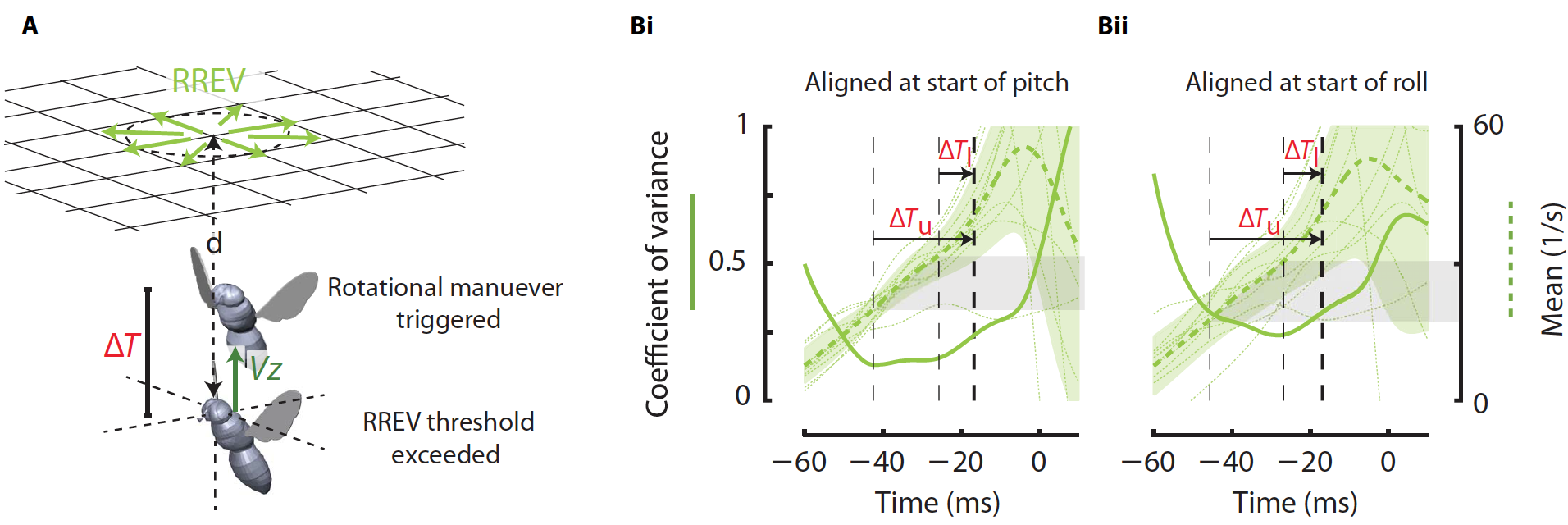
Pertama, tingkat ekspansi retina relatif (
RREV ) karena rangsangan tidak bergerak (
3A ). Indikator ini dapat dihitung sebagai rasio tingkat kenaikan target terhadap ukuran sebenarnya pada retina lalat selama gerakan ke atas (
Vz ). RREV juga sesuai dengan kebalikan dari waktu untuk bertabrakan (
t ). RREV dianggap sebagai sinyal persepsi yang penting, yang mengontrol kecepatan pendekatan selama pendaratan atau berjalan di sekitar rintangan.
 Gambar No. 4
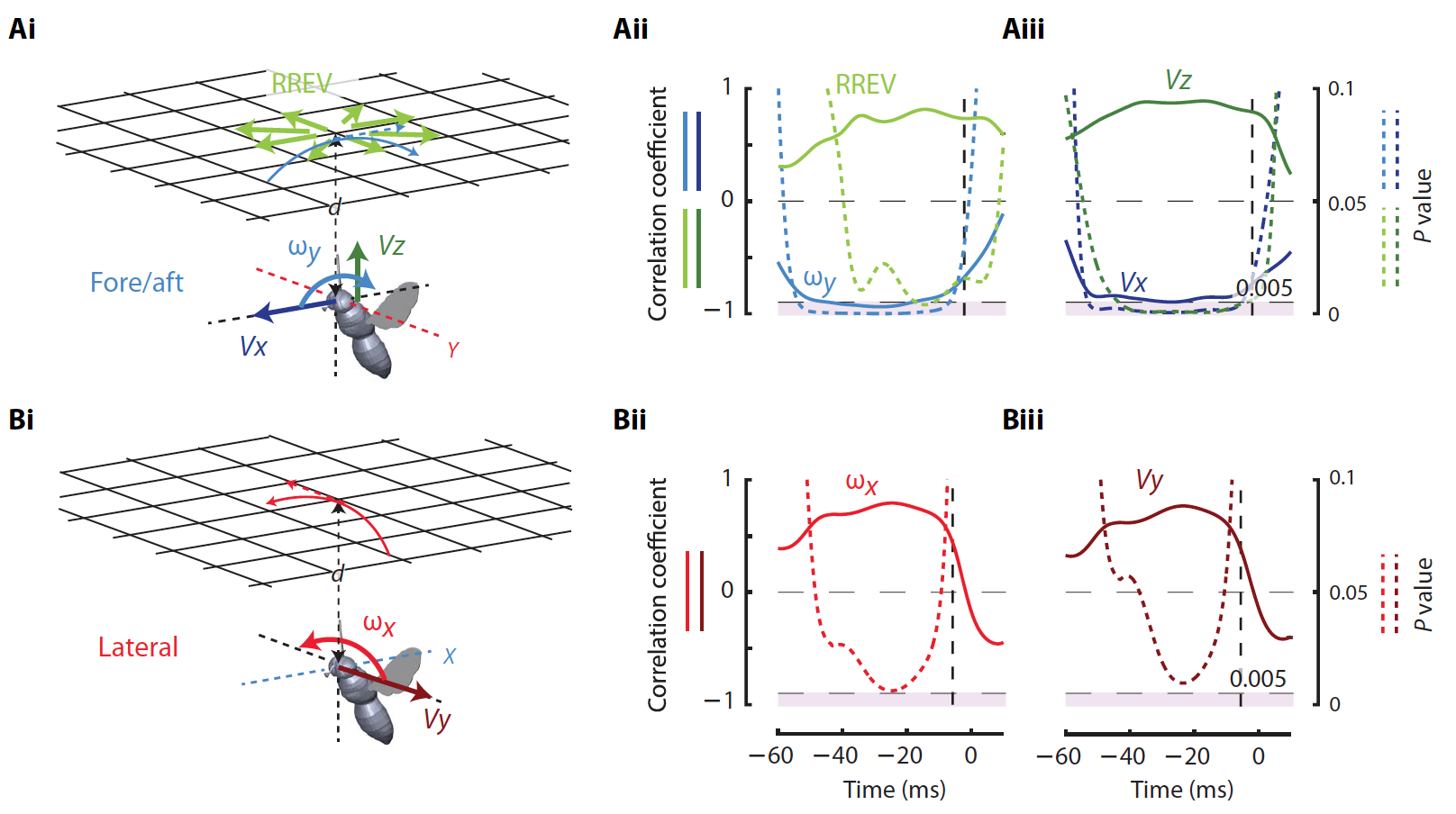
Gambar No. 4Kedua, kecepatan sudut relatif dari arah longitudinal (
4Ai ) dari langit-langit pada retina lalat (ω
y ). Isyarat visual ini adalah hasil dari menggerakkan tubuh ke depan / ke belakang (
V x ), yaitu dalam arah horizontal. Sebelumnya telah ditemukan bahwa sinyal inilah yang mengatur pendaratan pada permukaan horisontal.
Ketiga, kecepatan sudut transversal relatif dari langit-langit (ω
x ) pada fly retina (
4Bi ) diperoleh sebagai hasil dari pergerakan lateral (
V y ).
Para peneliti menyarankan bahwa manuver rotasi dimulai setelah jeda waktu yang tetap ketika sinyal visual provokatif (yang mengarah ke tindakan aktual) mencapai nilai ambang batas. Asumsi ini memungkinkan kita untuk mengevaluasi hubungan dari sinyal di atas dan manuver pergerakan yang dilakukan oleh lalat selama pendaratan.
Langkah pertama adalah menghitung kurva waktu dari koefisien variasi (CV) dari masing-masing sinyal visual. Pengamatan diambil sebagai dasar, di mana lalat berhasil mendarat di langit-langit pada upaya pertama.
Jika manuver rotasi dimulai setelah beberapa penundaan, ketika sinyal visual mencapai nilai ambang batas, CV sinyal visual ini harus minimal. Selain itu, itu harus lebih rendah daripada sinyal visual non-provokatif lainnya, yaitu sinyal visual provokatif harus memiliki dispersi terkecil. Pengamatan dan perhitungan menunjukkan bahwa di antara tiga sinyal yang diuji, itu adalah RREV yang memiliki nilai CV terendah pada saat memutar belokan (15%) dan roll (25%), sedangkan dua sinyal visual lainnya memiliki CV yang lebih tinggi secara signifikan (
3B ).
Ini berarti bahwa RREV adalah sinyal visual utama yang memicu dimulainya manuver rotasi selama pendaratan terbalik.
Nilai CV untuk RREV minimal antara 7 ms (lT
l ) dan 27 ms (∆T
u ) sebelum dimulainya manuver rotasi. Akibatnya, keterlambatan visual DT antara saat persepsi dan awal manuver berada dalam kisaran kecil ini. Ditemukan juga bahwa waktu kritis sebelum tabrakan, di bawahnya manuver rotasi diluncurkan (untuk menghindari tabrakan dan berhasil mendarat), adalah 31-53 ms. Sebagai perbandingan, untuk lalat yang mendarat di permukaan vertikal, angka ini adalah 76 ms. Dengan kata lain, ketika mendarat di langit-langit, lalat memiliki lebih sedikit waktu untuk kesalahan.
Manuver rotasi, berdasarkan pengamatan, cukup bervariasi dalam hal kecepatan dan pitch roll. Keragaman ini dapat menunjukkan bahwa manuver rotasi diatur tidak hanya oleh komponen waktu, tetapi juga oleh sinyal sensorik lainnya.
Lalat menggunakan sinyal sensorik untuk memberikan manuver rotasi melalui saluran langsung dan umpan balik. Saluran komunikasi langsung mengeluarkan perintah kontrol spontan yang menyebabkan perubahan sementara yang signifikan dalam pergerakan sayap. Perubahan-perubahan ini secara langsung mempengaruhi amplitudo reaksi primer terhadap manuver.
Saluran umpan balik memberikan respons kompensasi yang menyebabkan perubahan kecil dalam pergerakan sayap. Perubahan seperti itu mempengaruhi redaman (penindasan getaran) dan stabilisasi manuver.
Tingkat pengaruh sinyal sensor tertentu pada manuver dinilai dengan mendeteksi korelasi roll maksimum dan kecepatan rotasi selama manuver rotasi dengan sinyal sensorik yang diterima oleh lalat sebelum atau setelah dimulainya manuver.
Sinyal sensor yang diusulkan mencakup tiga visual (RREV, ω
x dan ω
y ), yang dibahas sebelumnya, dan tiga komponen kecepatan linier (
V x ,
V y dan
V z ).
Analisis regresi linier menunjukkan bahwa untuk periode waktu yang lama sebelum dimulainya manuver, kecepatan pitch maksimum berkorelasi positif dengan RREV (
4Aii ) dan kecepatan vertikal
Vz (
4Aiii ), tetapi negatif dengan rotasi longitudinal ω
y (
4Aii ) dan kecepatan linear longitudinal
V x (
4Aiii ).
Pada gilirannya, kecepatan gulungan puncak berkorelasi positif dengan rotasi lateral ω
x (
4Bii ) dan kecepatan linier lateral
V y (
4Biii ) selama periode waktu yang lama sebelum dan setelah dimulainya manuver.
Analisis juga menunjukkan bahwa lalat dapat mengubah kekuatan manuver rotasi agar lebih efektif menggunakan getaran tubuh pada saat pendaratan, yaitu, transmisi impuls linier ke impuls sudut.
Sebagai pengamatan menunjukkan, kecepatan nada menurun ketika pulsa linier tinggi, seperti yang ditunjukkan oleh korelasi negatif antara tingkat nada puncak dan sinyal sensor. Jadi, alih-alih pitch, lalat membalikkan tubuh mereka, meningkatkan osilasi longitudinal tubuh dengan cakar mereka dan mentransmisikan dorongan linear langsung ke momentum sudut pitch.
Peningkatan kecepatan roll juga diamati ketika impuls linier lateral tinggi, seperti yang ditunjukkan oleh korelasi positif antara kecepatan roll puncak dan sinyal sensorik. Korelasi terbalik semacam itu dapat terjadi dalam situasi di mana lalat membutuhkan jarak yang lebih besar untuk menaikkan cakar ipsilateral mereka cukup tinggi dan mencapai langit-langit untuk goyang tubuh lebih lanjut.
Jangan lupa tentang atribut terpenting penerbangan untuk lalat, mis. tentang sayap.
Para peneliti menganalisis kinematika sayap lalat selama pendaratan di langit-langit, karena itu adalah sayap yang menciptakan berbagai impuls aerodinamik yang diperlukan untuk manuver yang sukses.Pengamatan sayap-sayap lalat biru mengungkapkan sejumlah perubahan yang terjadi pada saat manuver.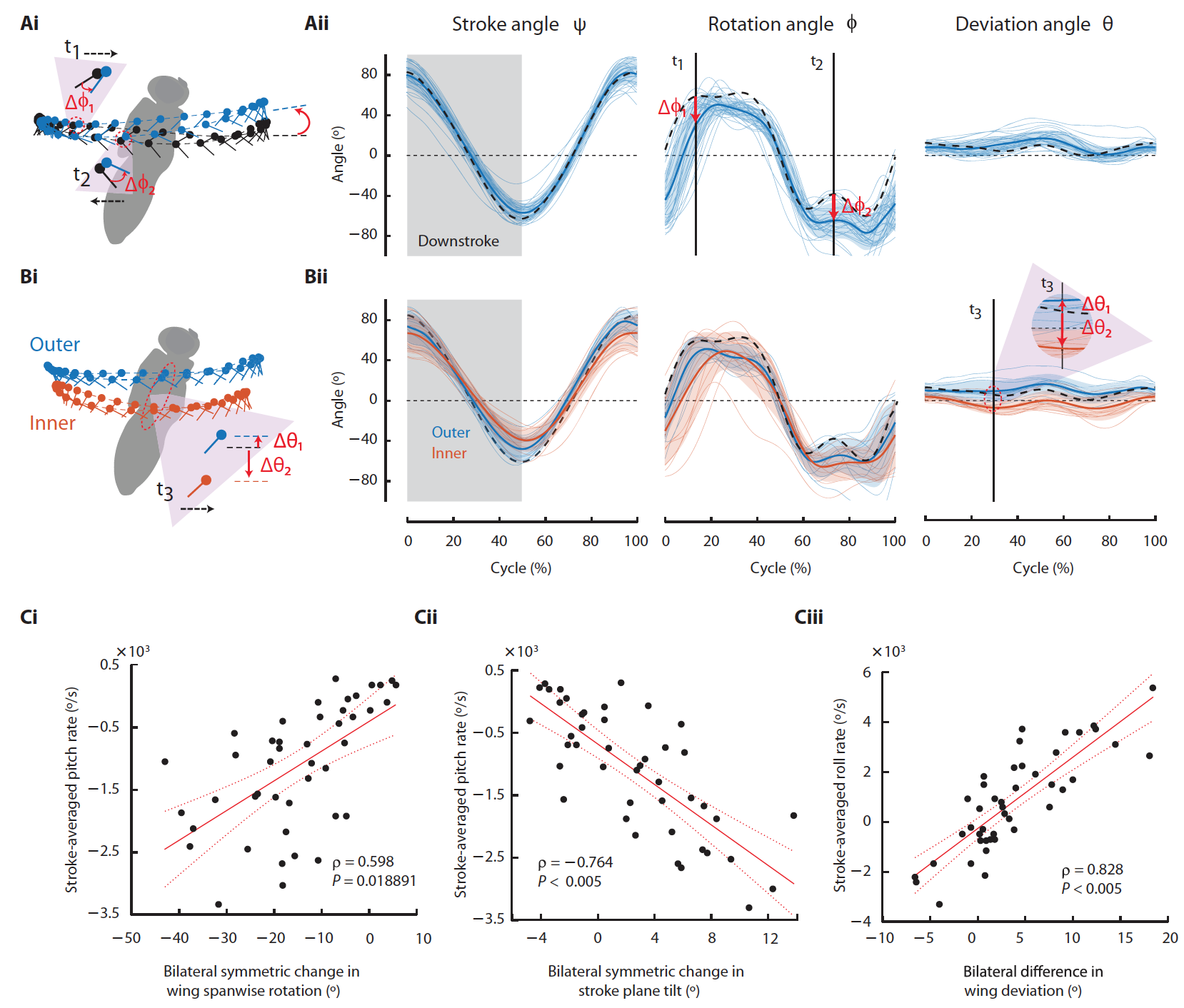 Gambar No. 5Hal pertama yang ditemukan adalah perubahan simetris bilateral dalam rotasi longitudinal sayap ( 5A dan 5Ci ) dan perubahan simetris bilateral pada sudut bidang sayap ( 5A dan 5Cii ), yang keduanya sangat berkorelasi dengan frekuensi pitch. Ada juga perubahan kemiringan sayap ( 5B dan Ciii ), yang sangat berkorelasi dengan kecepatan roll. Selain itu, ada juga perubahan amplitudo flap dan rotasi sayap tengah, yang berkontribusi pada roll.
Gambar No. 5Hal pertama yang ditemukan adalah perubahan simetris bilateral dalam rotasi longitudinal sayap ( 5A dan 5Ci ) dan perubahan simetris bilateral pada sudut bidang sayap ( 5A dan 5Cii ), yang keduanya sangat berkorelasi dengan frekuensi pitch. Ada juga perubahan kemiringan sayap ( 5B dan Ciii ), yang sangat berkorelasi dengan kecepatan roll. Selain itu, ada juga perubahan amplitudo flap dan rotasi sayap tengah, yang berkontribusi pada roll.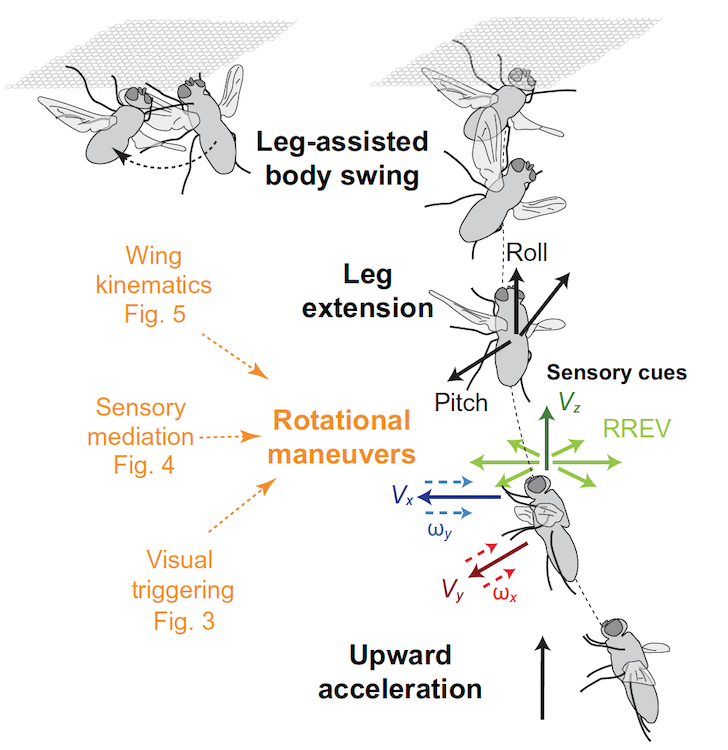 Image No. 6Untuk kenalan yang lebih mendetail dengan nuansa penelitian, saya sarankan Anda melihat laporan para ilmuwan dan bahan tambahan untuk itu.
Image No. 6Untuk kenalan yang lebih mendetail dengan nuansa penelitian, saya sarankan Anda melihat laporan para ilmuwan dan bahan tambahan untuk itu.Epilog
Merangkum semua hasil pengamatan dan perhitungan, para peneliti sampai pada kesimpulan bahwa pendaratan terbalik di langit-langit disebabkan oleh urutan modul perilaku yang terkoordinasi dengan baik (diagram di atas).Mendarat di langit-langit dapat mencakup proses saraf yang tidak hanya menghitung informasi pengodean RREV tentang waktu sebelum tabrakan, tetapi juga sinyal sensorik lain yang seharusnya menyandikan gerakan linear multi-sumbu tubuh.Saat ini, para ilmuwan masih belum dapat secara akurat menjawab pertanyaan tentang sinyal sensorik mana yang menyebabkan gerakan tertentu selama manuver. Tetapi pekerjaan yang dilakukan dengan tegas memberikan dasar untuk penelitian di masa depan.Pengamatan serangga dan burung selalu menjadi inspirasi bagi manusia untuk membuat pesawat terbang. Mempelajari lalat biru tidak terkecuali. Para ilmuwan percaya bahwa pengamatan mereka menunjukkan bahwa untuk keberhasilan implementasi robot atau kendaraan berawak yang mampu mendarat di permukaan terbalik, diperlukan integrasi komputasi dan proses mekanis yang ketat. Misalnya, dapat berupa kombinasi skema pengenalan cepat untuk gambar dan sistem untuk mengontrol posisi perangkat plus sistem stabilisasi yang terbang terwujud dengan menggetarkan tubuh pada kaki mereka.Dulu seorang pria hanya bisa bermimpi terbang, sekarang itu kenyataan. Tetapi kita hanya tamu di lingkungan yang asing bagi kita, yang merupakan organisme asli banyak makhluk hidup, dan kita masih memiliki banyak hal untuk dipahami, ditemukan, dan dieksplorasi, sebelum kita menjadi tetangga penuh mereka di awan.Terima kasih atas perhatian Anda, tetap penasaran, dan selamat bekerja, kawan! :)
Terima kasih telah tinggal bersama kami. Apakah Anda suka artikel kami? Ingin melihat materi yang lebih menarik? Dukung kami dengan melakukan pemesanan atau merekomendasikannya kepada teman-teman Anda,
diskon 30% untuk pengguna Habr pada server entry-level analog unik yang kami ciptakan untuk Anda: Seluruh kebenaran tentang VPS (KVM) E5-2650 v4 (6 Cores) 10GB DDR4 240GB SSD 1Gbps mulai dari $ 20 atau cara membagi server? (opsi tersedia dengan RAID1 dan RAID10, hingga 24 core dan hingga 40GB DDR4).Dell R730xd 2 kali lebih murah?Hanya kami yang memiliki 2 x Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 TV dari $ 199 di Belanda! Dell R420 - 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB - mulai dari $ 99! Baca tentang Cara Membangun Infrastruktur Bldg. kelas c menggunakan server Dell R730xd E5-2650 v4 seharga 9.000 euro untuk satu sen?