Halo semuanya!
Dalam posting ini saya ingin kembali ke kelanjutan desain mesin untuk melakukan tes fisik dan mekanik.
Biarkan saya mengingatkan Anda (bagian
pertama ) bahwa mesin ini (prototipe) adalah tipe kantilever dan dapat melakukan uji tarik dan kompresi di dua zona - atas dan bawah.
Selain artikel pertama tentang kinematika dan perakitan, pegangan timbul dengan spons gelombang yang dicetak pada printer 3D ditambahkan ke desain, gearbox pengangkat jendela mobil bertindak sebagai drive. Karena kita berbicara tentang unit daya, motor gir ini agak lemah, terutama pada putaran rendah. Mungkin dalam modifikasi proyek berikut ini saya akan memasang motor roda gigi dengan motor stepper.
Sekarang saya akan berbicara tentang perangkat lunak. Saya harus segera mengatakan bahwa programmer dari saya adalah begitu-begitu, tidak semuanya ternyata seperti yang saya inginkan, program ini masih sangat mentah, meskipun bekerja.
Program ini ditulis dalam lingkungan pemrograman Delphi. Saya sudah akan mengubah desain pada tahap ini, karena ada saat-saat tidak nyaman, tetapi untuk saat ini saya tidak akan melakukan ini, saya ingin mengerjakan algoritma utama terlebih dahulu.
Elektronik didasarkan pada kontroler Arduino dan dua modul tambahan. Firmware di dalamnya diunggah cukup sederhana, yaitu pengumpulan data dari dua sensor, penerimaan dan pengiriman data melalui port serial, dan kontrol gear motor.
Untuk bekerja dengan port serial, saya menginstal perpustakaan ComPort. Data dari Arduino dikirim sebagai string: S force sensor / sensor perpindahan E (S123456 / 123E).
Program ini adalah jendela tunggal, dengan dimensi 800x600 piksel (agar tidak repot dengan penskalaan). Ini berisi beberapa penanda: Serangkaian tes baru, Tes, Pengaturan.
Saya akan mulai dengan bookmark terakhir - Pengaturan.
Semua data yang diterima melalui port ditampilkan di terminal, darinya saya tarik keluar string, periksa kepatuhannya dan pisahkan nilainya dengan variabel.

Variabel dikalikan dengan koefisien untuk mencocokkan massa aktual dan nilai perpindahan.
Kami mendapatkan semua koefisien ini di tab yang sama, di bidang yang terkait dengan gaya, perpindahan atau kecepatan.
Koefisien perhitungan kecepatan bekerja sesuai dengan prinsip invers, ia menerjemahkan nilai kecepatan (nyata) yang ditetapkan ke dalam yang dipahami oleh Arduino dari 0 hingga 255.
Setelah mengisi semua bidang dan menghitung koefisien, data dapat disimpan. Mereka disimpan dalam file Exel, karena nyaman untuk melihatnya dan memperbaikinya jika perlu.
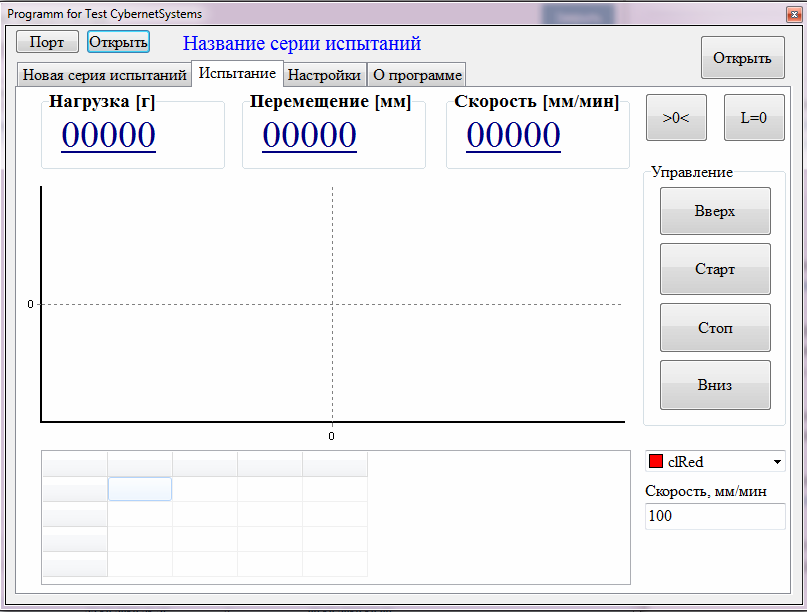
Mari kita pergi ke halaman - Tes.
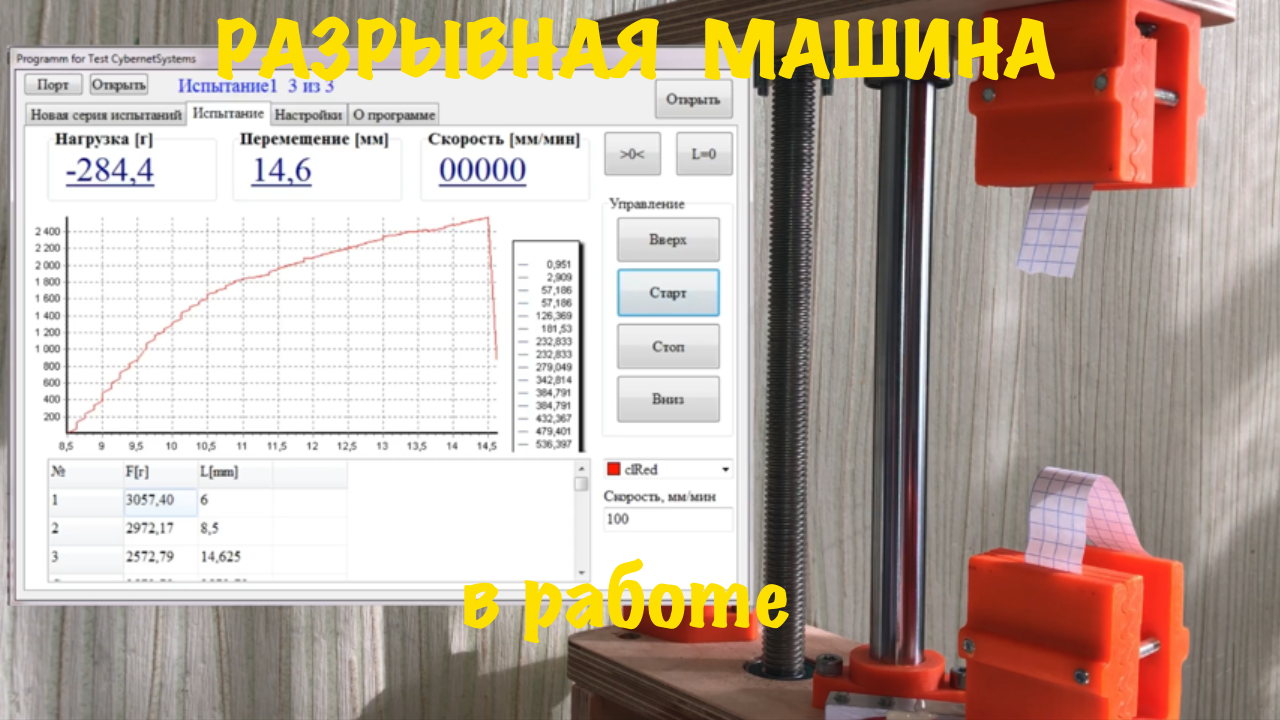
Ini, bisa dibilang, halaman utama saat bekerja dengan mesin. Bagian atas menampilkan data dari sensor. Tombol kontrol mesin terletak di sisi kanan: menggerakkan yoke yang dapat dipindahkan, "Atas", "Bawah", dan "Stop". Tombol "Mulai" memulai tes dengan kecepatan dan arah yang ditentukan dalam pembuatan tes, tetapi lebih dari itu di bawah ini.
Di bagian tengah ada area output dari jadwal tes, di bawah ini adalah tabel ringkasan hasil serangkaian tes. Tabel diisi secara otomatis setelah pengujian (penghancuran sampel), nilai maksimum gaya dan perpindahan.
Untuk memulai serangkaian tes baru, kita akan menuju ke tab pertama.
Itu harus menunjukkan nama seri uji, jumlah tes, dan kecepatan balok akan bergerak selama pengujian. Biasanya untuk pengujian menurut GOST adalah 12 mm / mnt, tetapi dalam kasus saya ini sedikit lebih tinggi, karena motor gir tidak memiliki daya yang cukup pada kecepatan rendah.

Selanjutnya, Anda harus memilih jenis tes: kompresi, ketegangan atau bersepeda; serta kriteria untuk penghentian otomatis mesin setelah menyelesaikan tes.
Mungkin ada beberapa kriteria seperti itu - penghentian untuk mencapai beban atau pemindahan yang diberikan, dan penurunan muatan saat spesimen uji dihancurkan.
Yang terakhir lebih disukai, karena dimungkinkan untuk mengatur pemberhentian pada beban yang meningkat secara nonlinier.
Kriteria untuk penurunan beban pada pemberhentian adalah karena penurunan muatan dalam persen untuk waktu tertentu.
Setelah memasukkan semua parameter yang diperlukan untuk pengujian, klik tombol "Start" dan pergi ke halaman "Test".
Kami memasang sampel dalam genggaman, sejauh mungkin secara koaksial, sehingga pengujian lulus dengan benar.
Dalam program ini, kami mengatur ulang nilai beban dan perpindahan sehingga berat sampel dan tegangan pendahuluan setelah penjepitan dalam grippers tidak diperhitungkan.
Menekan tombol "Start" mengatur gerak yang dapat dilalui dalam gerakan, dan grafik mulai digambar di layar, yang menunjukkan bagaimana beban merayap naik. Setelah mencapai batas fisiknya, sampel hancur, dan mesin berhenti. Dalam tabel ringkasan di bawah grafik, nilai-nilai beban maksimum dan deformasi (perpindahan) muncul. Kemudian Anda dapat melanjutkan ke tes berikutnya dalam seri.
Di akhir tes terakhir, nilai rata-rata beban dan perpindahan ditampilkan dalam tabel ringkasan.
Setiap seri uji menyimpan parameter uji dan data larik dalam file Excel. Ini nyaman untuk analisis selanjutnya dalam program lain.
Di masa depan saya berencana untuk meningkatkan program dan mengganti drive dengan motor stepper dengan gearbox, dan kemudian akan terlihat ...