Dalam kerangka kerja Skolkovo Robotics & AI, pada 16 April 2019, Moskow menjadi tuan rumah pertemuan pertama di Rusia tentang Sistem Operasi Robot, kerangka kerja perangkat lunak populer di seluruh dunia yang mengimplementasikan algoritma dasar untuk membangun robot yang kompleks. Acara ini memberikan dorongan yang kuat untuk pengembangan semua tim. Kami terjun ke hal yang paling kami sukai - pengembangan! Karena itu, hanya sekarang kami telah menemukan waktu untuk mengkonsolidasikan bahan-bahan unik dari pertemuan kami, yang dikirimkan oleh pembicara untuk publikasi.
Di antara pengunjung forum robot terbesar di Rusia ada lebih dari 150 insinyur yang sudah menggunakan ROS atau hanya berencana untuk menggunakannya dalam proyek mereka. Ini adalah hasil yang baik untuk pertemuan pertama komunitas kecil pengembang ROS Rusia. Kami berusaha untuk menjadi bagian dari gerakan global - dan ratusan peserta sudah mengumpulkan acara serupa di luar negeri.
Pertemuan ROS Rusia kedua akan diadakan pada 30 November 2019 .
Terima kasih sekali lagi kepada semua orang yang datang dan menghabiskan waktu mereka untuk mempelajari laporan dan pertanyaan rumit yang terperinci. Semua ini menunjukkan bahwa ada minat yang besar dari masyarakat dalam pengembangan ROS, dan pekerjaan rutin diperlukan untuk terus melakukan pertemuan-pertemuan semacam itu. Kami tumbuh ketika kami berbagi praktik terbaik dan meningkatkan salah satu alat pengembangan robot paling umum di dunia - Sistem Operasi Robot.
Pembicara kami adalah pengembang praktik dengan topik dari pengalaman nyata mereka. Oleh karena itu, materi yang disajikan dalam publikasi ini mencerminkan kemungkinan menggunakan ROS dalam proyek yang ada dan yang sedang berlangsung.
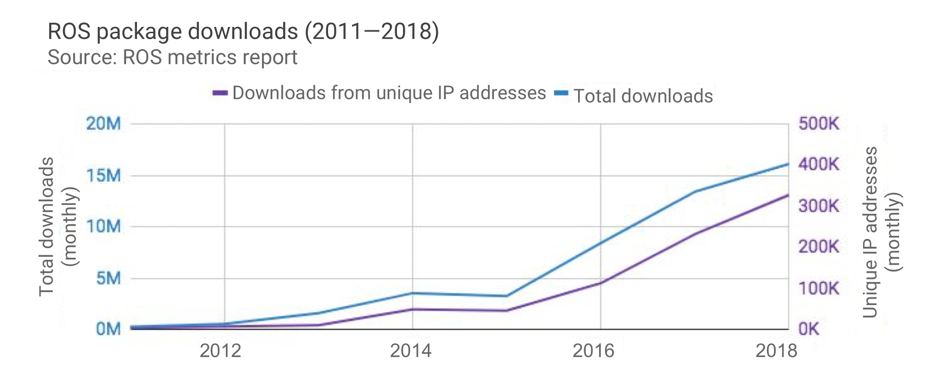
Komunitas ROS global saat ini adalah komunitas robot terbesar dan paling terbuka di dunia. Jumlah unduhan ROS telah meningkat hampir 6 kali sejak 2014! Jelas, ini adalah alat paling penting bagi mereka yang membuat robot, jadi kami di Laboratorium Robotika Sberbank mendukung semua orang yang berbagi nilai ROS dengan kami dan ingin bertukar pengalaman.
Jika Anda sedang mengembangkan algoritma baru untuk robot, maka menulis paket untuk ROS adalah solusi yang baik untuk mengintegrasikan mereka ke dalam robot yang ada dan menunjukkan kepada dunia.
Jika Anda baru memulai perjalanan dalam robotika, maka mempelajari ROS akan membantu Anda menguasai teknologi modern dan berintegrasi ke dalam komunitas.
Rapat ROS pertama penuh dengan laporan menarik. Tetapi karena tidak semua orang dapat menghadiri acara di Moskow, kami memposting video dan slide presentasi untuk Anda:
Pengantar ROS. Ideologi dan status saat ini.Alexey Burkov, Laboratorium Robotika Sberbank.Laporan ini berbicara tentang penampilan ROS, konsepnya dan orang-orang yang mengembangkannya, serta keadaan kerangka kerja saat ini dalam komunitas global.
Tautan ke slide presentasi.
Pengalaman menggunakan ROS dalam robotika kompetitif menggunakan contoh Eurobot.Alexey Postnikov, Laboratorium Robotika Sberbank.Laporan ini membahas sistem lokalisasi robot menggunakan penanda Aruco menggunakan ROS.
Tautan ke slide presentasi.
Ngomong-ngomong, Anda dapat ikut serta dalam kompetisi Eurobot dengan bergabung dengan tim SetUp yang didukung oleh Sberbank Robotics Laboratory - ini adalah cara yang bagus untuk mempelajari robotika dan ROS, dan mempraktikkan keterampilan Anda. Untuk mengambil bagian, tulis surat ke robotics@sberbank.ru.Navigasi SLAM dan laser lidar.Alexey Burkov, Laboratorium Robotika Sberbank.Kisah tentang bagaimana kami menggunakan ROS untuk menavigasi robot kurir menggunakan SLAM dan perencana jalur membahas topik-topik berikut:
- Membangun peta ruang dan pelokalan robot menggunakan algoritma Gmapping.
- Lokalisasi robot di peta oleh algoritma AMCL.
- Navigasi robot melalui MoveBase dan DWA.
Tautan ke slide presentasi.
Anda bisa mendapatkan magang di Laboratorium Robotika Sberbank pada topik kurir dan ROS, untuk ini, tulis surat ke robotics@sberbank.ru.Perencana lintasan robot dengan memperhitungkan peta tertentu dan hambatan dinamis menggunakan contoh Eurobot.Alexander Gamayunov, Laboratorium Robotika Sberbank.Sejarah membuat perencana rute Anda sendiri berdasarkan A *, T *, Costmap Server, Global Planner, Driver STM32 dan algoritma Ramer-Douglas-Pecker untuk berpartisipasi dalam kompetisi Eurobot internasional.
Tautan ke slide presentasi.
Pengalaman menggunakan ROS dalam sistem kontrol kendaraan tak berpenghuni bawah air otonom "Cousteau 2"Timur Akhtyamov, UCM Hydronautics.Simulasi kendaraan bawah air. Penggunaan mesin negara SMACH. Serial pembungkus ROS. Pemicu untuk kode QR. Roslaunch API untuk memulai dan menghentikan peluncuran file dari kode Python. Autostart node pada startup OS.
Tautan ke slide presentasi.
BelAZ di ROS saat kami di VIST Group menciptakan solusi penambangan.Elizaveta Shpiev, Grup VIST.Kisah tentang bagaimana VIST Group menggunakan ROS untuk menciptakan karier yang cerdas.
Tautan ke slide presentasi.
Kode pengujian di ROS adalah cara membuat mobil tak berawak dan tidak merusak apa pun.Oleg Shipitko, Visillect.Kisah menggunakan Google Test (C ++), Unittest (Python) dan Rostest untuk pengujian di ROS.
Tautan ke slide presentasi.
Visi komputer dalam robot adalah pengambilan sesuatu oleh seorang manipulator menurut data dari kamera RGBD.Alexander Syomochkin, Laboratorium Robotika Sberbank.Tentang cara menggunakan kamera RGBD untuk menangkap objek dengan robot dengan manipulator.
Tautan ke slide presentasi.
Penyatuan pengembangan ROS terpadu dunia.Konstantin Konogorsky, Grup VIST.Kelanjutan kisah karier intelektual Grup VIST, atau bagaimana menggabungkan yang tak terpisahkan.
Tautan ke slide presentasi.
ROS Docker Meluncurkan gambar ROS virtual pada komputer Linux.Alexander Syomochkin, Laboratorium Robotika Sberbank.Laporkan menggunakan Docker untuk membuat dan menjalankan gambar ROS virtual di Linux.
Tautan ke slide presentasi.
Perangkat apa yang sedang didengarkan dan apa yang mereka bicarakan.Alexander Menshikov, Laboratorium Robotika Sberbank.Menggunakan ROS untuk membuat layanan komunikasi suara.
Tautan ke slide presentasi.
Pertemuan ROS terakhir memberi para peserta banyak emosi positif dan laporan menarik tentang penggunaan ROS dalam robotika modern di Rusia, dan kami berharap dapat mengembangkan komunitas ROS Rusia lebih lanjut dengan bantuan Anda. Karena itu, kami mengundang semua orang untuk melakukan presentasi pada pertemuan ROS berikutnya pada 30 November 2019 di Moskow.
forms.gle/G3ggYcvFLfuJw1ur6Selain Rapat ROS, kami juga melakukan magang ROS di Laboratorium Robotika Sberbank untuk proyek-proyek kami, rincian lebih lanjut dapat ditemukan di
tautan .
Jika Anda ingin tahu lebih banyak tentang pekerjaan kami atau arah pengembangan robotika modern, kami sarankan Anda membaca dengan cermat
tinjauan analitik tahunan
pasar robotika global .
Bagi kami, pengalaman pertama mengumpulkan komunitas itu benar dan positif - kami akan melanjutkan ini. Dan
pertemuan ROS berikutnya dijadwalkan pada 30 November 2019 !
Anda dapat mengambil bagian sebagai pendengar dengan mengisi
aplikasi dan menunggu konfirmasi partisipasi Anda dalam surat.
