
Sebuah tim gabungan insinyur Swiss dan Jerman mengubah ekskavator berjalan konvensional menjadi robot otonom yang dapat menggali parit dari konfigurasi tertentu. Selain itu, akurasi menggali parit cukup tinggi - 3 sentimeter.
Menurut pengembang proyek, pembangun membutuhkan perangkat seperti itu, karena mereka dapat mempercepat proses penggalian parit di lokasi konstruksi. Selain itu, robot dapat menggali parit lebih akurat daripada seseorang (kecuali, tentu saja, spesialis kelas tinggi). Tetapi ada masalah - misalnya, kesulitan menampilkan peta ruang sekitarnya untuk robot. Masalah lain adalah penentuan lokasi robot sendiri dalam konfigurasi situs yang berubah dengan cepat.

Namun semuanya berjalan lancar - para insinyur, yang dipimpin oleh ilmuwan Marco Hutter, tetap mengembangkan ekskavator otonom yang dapat menggali parit berbagai konfigurasi dengan akurasi dan kecepatan tinggi. Basis untuk pembuatan robot adalah ekskavator berjalan Menzi Muck M545. Pengembang robot memutuskan untuk mengganti sistem hidrolik excavator dengan yang "pintar", di mana berbagai sensor dan sensor dipasang.
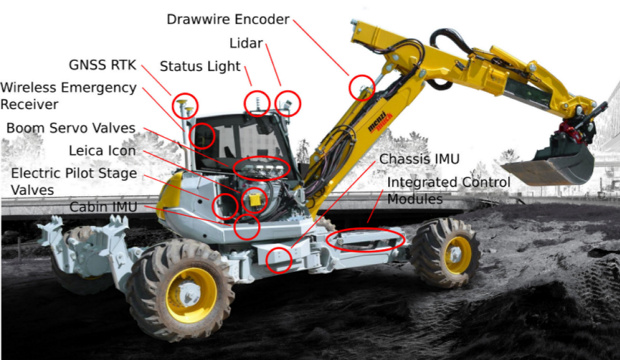
Mereka memungkinkan sistem untuk "memahami" dan melacak kekuatan interaksi dengan tanah. Excavator juga dilengkapi dengan sensor GPS dan penerima RTK, yang meningkatkan keakuratan menentukan lokasi sistem, plus penutup dan unit inersia. Berkat penyempurnaan, excavator belajar menentukan lokasi dengan akurat, sekaligus "membayangkan" jenis tanah yang akan digali.
Untuk robot, algoritma khusus dibuat yang memungkinkan untuk membuat model lingkungan, menghitung secara akurat sistem pergerakan bucket yang diperlukan untuk membuat parit dari bentuk yang diinginkan. Salah satu kesulitan yang dihadapi oleh para ilmuwan adalah bahwa tanah, setelah ember meninggalkan parit, runtuh. Yaitu sejumlah tanah kembali ke tempat penggaliannya. Algoritma memberikan peluang seperti itu dan excavator “tahu” apa yang harus dilakukan.
Robot kemudian diuji di salah satu lokasi konstruksi, ia perlu menggali parit dengan profil dalam bentuk trapesium. Setelah pekerjaan selesai, ternyata keakuratan sistem sekitar 3 sentimeter. Dan ini jauh lebih tinggi daripada akurasi yang diperoleh pengembang lain.
Di masa depan, robot excavator ini akan diuji dalam kondisi lain. Hasilnya haruslah robot yang tahu cara bekerja itu sendiri, tanpa pengawasan dan dukungan dari luar. Robot seperti itu akan secara efektif membantu pembangun, mempercepat proses penggalian parit.
Ini bukan satu-satunya proyek tim ilmuwan yang disebutkan di atas. Dia telah mengerjakan robotisasi excavator dan sistem lain yang bekerja di lokasi konstruksi selama beberapa tahun. Jadi, ekskavator berjalan serupa diubah
menjadi unit yang dikendalikan oleh operator jarak jauh .