Salam sayang!
"Hidroakustik memotong mikrofon" ©
Dari artikel kami sebelumnya, situasinya tidak berubah secara mendasar: kami masih belum menjelajahi sebagian besar
kolam laut dunia, yang berarti kami perlu meningkatkan tekanan.
Jadi, saya memperkuat bagaimana saya bisa.
Hari ini saya akan berbicara secara terperinci dan "dengan jari" tentang berbagai jenis sistem navigasi bawah laut sesuai dengan klasifikasi yang salah, apa itu, apa pro dan kontra, secara umum, dalam hal mana harus berlari, apa yang harus ditekan dan ke mana harus berpaling.
Achtung: jejak-jejak matan mungkin ada di artikel!
Jika air tenang jiwa Anda membangkitkan sinyal ini, selamat datang di kat!
Ketika datang ke
[1] sistem penentuan posisi akustik, tipenya selalu diindikasikan sebagai USBL, LBL, SBL. "BL" di sini berarti Baseline, mis. baseline. Di sini saya usulkan dan mulai.
Apa baseline?
Baseline dibentuk oleh dua titik referensi, posisi relatif yang diketahui pada titik waktu tertentu. Gambar pertama menunjukkan bagaimana titik referensi ini bersama dengan yang diinginkan menentukan himpunan segitiga spasial (
B1B2A∗ ), dasar yang merupakan dasar (
B1B2 )
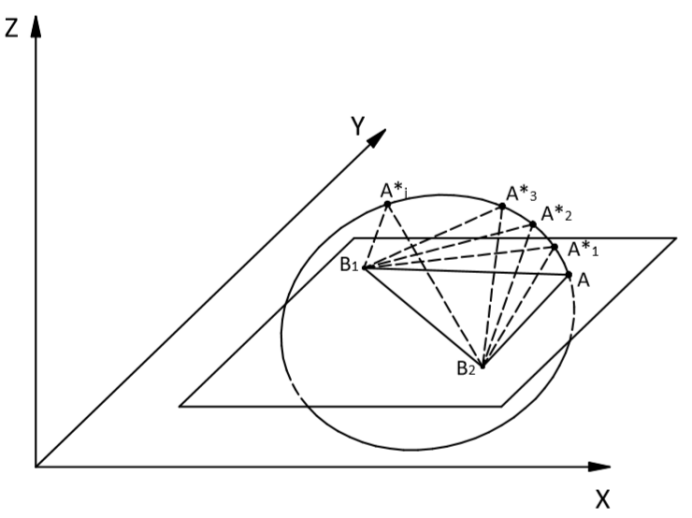 Garis dasar mendefinisikan titik yang diinginkan pada lingkaran.
Garis dasar mendefinisikan titik yang diinginkan pada lingkaran.Segitiga didefinisikan oleh:
- atau pada pangkalan dan dua rentang, diukur dari kedua titik referensi ke yang diinginkan, dalam hal ini kita berbicara tentang trilateration;
- atau di pangkalan dan dua sudut, yang disebut triangulasi.
Penyimpangan lirisSaat menulis artikel, saya berpikir tentang bagaimana saya masuk ke dalamnya.
Saya ingat bahwa sebagai seorang anak saya menonton film di mana di dunia pasca-apokaliptik orang-orang berburu naga (yang menyebabkan kiamat), di mana mereka menghitung lokasi mereka di udara, meletakkan "suar" di tanah, dan saya telah belajar dengan jelas sejak saat itu. bahwa untuk gambaran lengkap tentang mercusuar dibutuhkan tiga. Kata "triangulasi" berakar kuat di otak remaja. Saya ingat apa yang saya pikirkan saat itu: betapa kerennya menjadi pengembang hal-hal seperti itu.
Sebenarnya, baiklah, ini aku!
Definisi segitiga berarti penentuan koordinat titik yang diinginkan.
Penggunaan segitiga dalam menentukan lokasi berasal dari kedalaman berabad-abad dan referensi pertama sudah dalam karya
Thales [2] dan
Euclid [3] .
Satu garis dasar memberikan banyak segitiga yang simpulnya terletak pada sebuah lingkaran. Dan untuk menentukan lokasi titik yang diinginkan dalam ruang n-dimensi, garis dasar n +1 diperlukan. Jumlah garis dasar yang diperlukan dapat dikurangi menjadi n jika salah satu koordinat titik yang diinginkan diketahui, misalnya, kedalaman (atau ketinggian
terbang naga ), yang sering dikenal dari pengukuran langsung.
Definisi garis dasar di atas biasanya mengacu pada metode triangulasi dan trilaterasi, tetapi dapat diperluas ke metode multilaterasi [4].
Dalam hal ini, sudut dan rentang ke titik yang diinginkan tidak diketahui, tetapi perbedaan antara yang terakhir diketahui (misalnya, saat emisi sinyal oleh objek yang diinginkan tidak diketahui, tetapi saat kedatangannya di kedua titik referensi diketahui dan diukur dengan jam yang disinkronkan, yaitu, penundaan antara kedatangan sinyal di titik referensi).
Waktu kedatangan sinyal dikalikan dengan kecepatan rambat sinyal yang biasa disebut pseudorange.
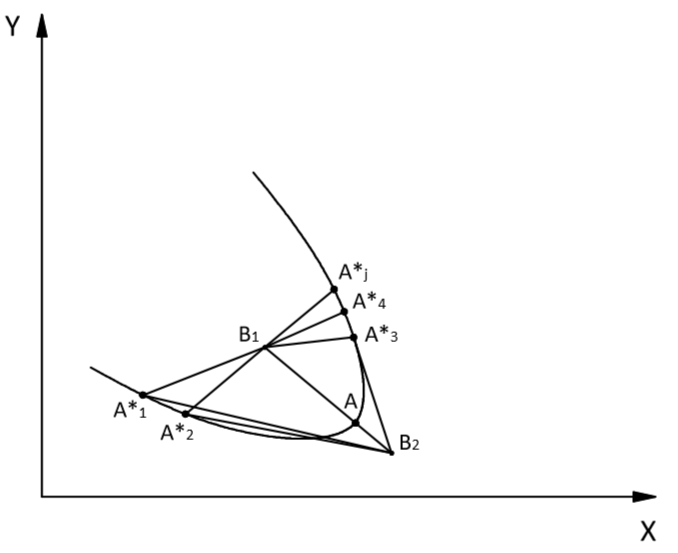 Baseline untuk multilaterasi menentukan titik yang diinginkan pada hiperbola
Baseline untuk multilaterasi menentukan titik yang diinginkan pada hiperbolaDari gambar di atas, mudah untuk melihat bahwa dengan cara ini sejumlah segitiga yang tak terbatas dapat didefinisikan (
B1B2A∗ ) yang simpulnya mewakili posisi titik yang diinginkan terletak pada hiperbola. Dalam hal ini, titik jangkar akan menjadi fokus hiperbola.
Di sini, seperti dalam kasus triangulasi, posisi titik yang diinginkan sepenuhnya ditentukan oleh garis dasar n +1 untuk ruang dimensi n.
Kata buruk untuk kontrol ekspor
Faktanya adalah bahwa, tergantung pada lokasi koordinat, ada dua kelas sistem:
- sebenarnya navigasi (langsung disebut sistem navigasi), di mana koordinat dihasilkan pada objek itu sendiri (seperti di GPS).
- sistem pelacakan (pengawasan), ketika misalnya ada semacam suar pada objek dan kami membawa itu.
Jadi, untuk kontrol ekspor, kata ini sangat buruk dan tidak cocok, yang secara tragis diverifikasi oleh pengalaman kami sendiri. Untuk menjelaskan kepada mesin birokrasi bahwa ini "sama sekali tidak seperti yang Anda pikirkan" sangat sulit dan sejak itu kami menyebutnya sistem penentuan posisi sistem.
Vogue kutu buku diaMengingat ambiguitas terjemahan, perlu disebutkan bahwa sistem penentuan posisi tidak boleh bingung, misalnya, dengan apa yang disebut pemosisian dinamis dalam kapal, sistem pemosisian dinamis (Eng. DP, Pemosisian dinamis), ini umumnya berasal dari area yang berdekatan, tetapi artinya sedikit berbeda - sistem yang memungkinkan kapal mempertahankan posisi geografis dan orientasinya (pos), "melayang" di satu tempat.
Klasifikasi yang diterima secara umum sesuai dengan ukuran relatif dari baseline dan ketidaklengkapannya
Sekarang kembali ke huruf pertama singkatan USBL, LBL dan SBL. Mereka menentukan ukuran relatif dari garis dasar.
Secara umum, ini ditentukan relatif terhadap ukuran maksimum lintasan yang mungkin dari objek yang diposisikan.
Jika itu cukup sederhana untuk dijelaskan, misalnya, kami
memaksa penyelam yang yakin untuk menggantung suar terdakwa pada dirinya sendiri dan ingin memantau pergerakannya. "Ukuran maksimum lintasan yang mungkin dari objek yang diposisikan" adalah diameter lingkaran di mana seluruh lintasan pergerakannya akan cocok.
Vogue kutu buku diaUntuk semua tingkat keparahan, harus disebutkan bahwa lintasan penyelam dimaksudkan dalam sistem koordinat yang terkait dengan basis pengukuran. Yaitu jika kita mengikuti penyelam dari perahu karet kapal penopang dan melayang bersamanya, maka pada prinsipnya kita bisa melayang beberapa kilometer (pada kenyataannya, tentu saja, ini tidak bisa dengan penyelam, tetapi dengan robot yang dikendalikan dari jarak jauh - sepenuhnya). Dan justru lintasan yang diperkirakan sehubungan dengan kapal kami.
Jelas bahwa atribut klasifikasi adalah begitu-begitu, dan saya sepenuhnya setuju. Namun demikian, klasifikasi yang diterima secara umum disusun seperti itu. Dan mereka membedakan:
- USBL, garis dasar ultra-pendek - sistem ultrashort-base, di mana dimensi garis dasar jauh lebih kecil daripada lintasan objek yang diposisikan dan
- SBL, baseline pendek - sistem basis-pendek di mana dimensi garis pangkal sebanding dengan lintasan objek yang diposisikan,
- LBL, baseline panjang - sistem baseline panjang dimana dimensi garis dasar secara signifikan melebihi dimensi lintasan objek yang diposisikan.
Ada ambiguitas tertentu dalam pemilihan kelas antara sistem pangkalan pendek dan panjang, dan sering, sebagai salah satu tanda sistem pangkalan pendek, mereka menunjukkan hubungan yang kaku antara elemen pendukung satu sama lain - misalnya, ketika mereka diperbaiki pada kapal. Elemen pendukung sistem basis panjang tidak terhubung secara kinematis dengan cara apa pun, mis. perubahan posisi mereka di ruang angkasa tidak berkorelasi.
Kami sekarang mempertimbangkan ketiga jenis dan beberapa kombinasi mereka secara lebih rinci dalam hal kekuatan dan kelemahan mereka.
Sistem berbasis ultrashort
Seperti namanya, garis dasar dalam sistem basis-ultrashort (sistem UKB) jauh lebih kecil daripada lintasan objek yang diposisikan.
Sebagai aturan, dalam kebanyakan sistem UHF yang ada (misalnya,
ini [5] ,
ini [6] dan
ini [7] ), ukuran garis pangkal berkisar dari satuan hingga puluhan sentimeter. Kebanyakan dari mereka adalah sistem goniometrik - yaitu sistem yang menentukan sudut kedatangan sinyal dari suar-responden atau pinger.
Dalam hal tata letak, sistem tersebut terdiri dari:
- stasiun pangkalan - perangkat yang mengandung antena penerima multi-elemen, elemen individual yang membentuk array antena bertahap, dalam hal ini, sudut kedatangan ditentukan dari perbedaan fase dari sinyal yang masuk di antara elemen-elemen individual, atau serangkaian garis dasar, juga dibentuk oleh pasangan elemen individual, di dalam hal ini, sudut kedatangan ditentukan oleh keterlambatan berbeda dalam kedatangan sinyal ke elemen;
Agar tidak mengutak-atik hak cipta untuk gambar, saya akan memberikan Zima-Base kami sebagai contoh stasiun pangkalan:
Di atas meja:

Di saat kerja:

- responden suar menanggapi permintaan dari stasiun pangkalan, yang pada gilirannya memungkinkan menentukan waktu propagasi sinyal antara suar dan stasiun pangkalan (kisaran miring) atau pinger, tidak seperti suar responden, memancarkan sinyal secara berkala. Pinger dapat disinkronkan sebelumnya dengan stasiun pangkalan, yang memungkinkan pengukuran waktu propagasi satu arah.
Sebagai contoh, sekali lagi saya akan memberikan suar-responden dari sistem Zima kami:
Otonom dengan tabung baterai:

Onboard TNLA:

Ada juga sistem di mana transponder dipasangkan secara elektrik ke stasiun pangkalan dan sinyal interogasi disuplai sebagai pulsa gerbang listrik.
Dengan demikian, kelas sistem UKB diwakili oleh berbagai eksekusi spesifik yang cukup luas, dan seringkali peringkat sistem sebagai UKB tidak memberikan informasi yang cukup tentang metode spesifik operasinya.
Gambar berikut menggambarkan prinsip umum operasi sistem UKB.
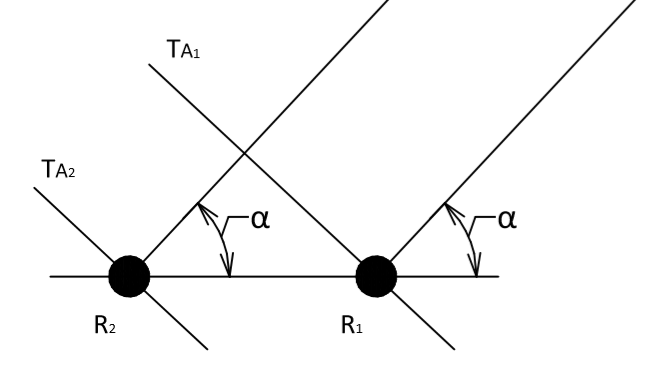 Demonstrasi prinsip pengoperasian sistem yang menentukan sudut kedatangan sinyal
Demonstrasi prinsip pengoperasian sistem yang menentukan sudut kedatangan sinyalGambar di atas menunjukkan sepasang transduser array antena yang menerima depan sinyal datar. Dari jarak yang diketahui
R1R2 antara transduser dan penundaan yang diukur
TA1TA2 ditentukan oleh sudutnya
alpha kedatangan sinyal.
Keuntungan nyata dari sistem UKB termasuk komposisi peralatan yang diperlukan kecil dan penyebaran sistem yang cepat.
Dalam kasus umum, responden atau pinger dapat
dibungkus dengan selotip yang hanya dipasang pada objek yang diposisikan, yang meningkatkan universalitas sistem secara keseluruhan.
Dalam beberapa kasus praktis, penggunaan sistem UKB tidak terbantahkan. Misalnya, ketika pencarian dilakukan untuk sesuatu yang
terendam secara tidak sengaja yang telah tenggelam dan tidak mungkin untuk membuat pangkalan yang jauh sebelumnya mengingat luasnya area pencarian, atau ketika kedalaman tempat tidak memungkinkan untuk membuat pangkalan yang mengambang, dan pemasangan pangkalan bawah tidak dibenarkan dalam kerangka waktu dan / atau cuaca kondisi.
Namun, sistem UKB memiliki kelemahan serius tertentu. Misalnya, untuk menentukan posisi objek yang diposisikan dalam koordinat absolut, stasiun pangkalan itu sendiri harus sepenuhnya ditentukan dalam ruang: Anda perlu tahu tidak hanya posisi geografisnya tetapi juga orientasi array penerima di ruang: sudut azimut, sudut rol dan sudut potong.
Artinya, dari sudut pandang struktural, sistem UHF harus mencakup tidak hanya array antena multi-elemen, yang dengan sendirinya cukup kompleks secara struktural, tetapi juga perangkat yang dapat menentukan posisinya dalam ruang - sensor kemiringan sepanjang dua sumbu horizontal dan sensor heading - magnetic atau kompas GNSS. Jika antena penunjuk arah dipasang pada sesuatu di bawah air, maka, dengan demikian, kemungkinan menggunakan kompas GNSS ditutup.
Apalagi sejak itu posisi objek yang diinginkan diperkirakan oleh dua sudut kedatangan sinyal (horizontal dan vertikal) atau oleh sudut dan kedalaman horizontal (yang modis dan progresif) ditransmisikan dalam sinyal responden atau pinger, jelas bahwa akurasi sudut akhir
delta alpha sistem akan memberikan peningkatan dengan kisaran keduanya
Dtg delta alpha kesalahan dari posisi yang ditentukan dari objek yang diposisikan, tumbuh dengan jarak sebanding dengan garis singgung kesalahan sudut, yang diilustrasikan dalam gambar berikut:
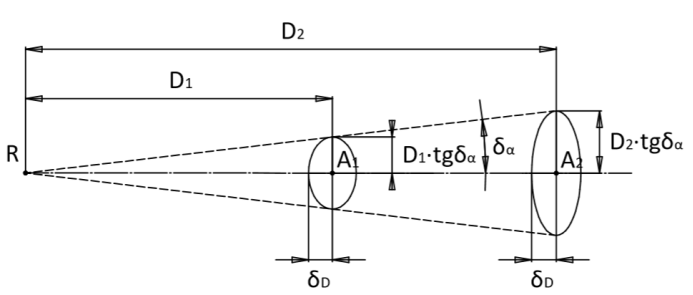 Pengaruh akurasi sudut sistem UKB pada kesalahan dalam menentukan posisi objek yang diposisikan
Pengaruh akurasi sudut sistem UKB pada kesalahan dalam menentukan posisi objek yang diposisikanGambar di atas menunjukkan penyebaran lokasi yang ditentukan dari sumber sinyal. Salah satu semi-sumbu elips
deltaD ditentukan oleh kesalahan dalam mengukur jarak, dan yang lainnya, sebagai
Dtg delta alpha di mana D adalah jarak (rentang miring) ke sumber.
Selain itu, dalam kasus ambiguitas dan ketidakmungkinan identifikasi yang dijamin dari balok langsung (balok - baca bagian depan sinyal, panggil langsung yang datang langsung dari sumbernya, tanpa mencerminkan dari apa pun), sistem UHF secara keseluruhan sangat kuat dipengaruhi oleh propagasi multipath, terutama jika ada pantulan dari garis pantai atau elemen lanskap bawah laut lainnya.
Dengan kata lain, di hadapan sinyal pantulan kuat yang datang dari arah lain (ke arah sebaliknya), sistem UHF tidak kebal terhadap penerimaan sinyal seperti itu langsung (karena secara umum masalah ini tidak dapat dipecahkan - jumlah sinyal yang dipantulkan dapat lebih kuat, "lebih keras" daripada langsung dan semacamnya). terkadang dalam praktiknya), yang mengarah pada hasil yang sepenuhnya salah dalam menyelesaikan masalah navigasi.
Sistem yang lebih baru menggunakan pengukuran langsung dari kedalaman transponder atau pinger, sementara sistem yang lebih tua menentukan posisi pada dua sudut. Faktanya adalah bahwa sudut vertikal memiliki kepastian yang paling sedikit, karena suara secara keseluruhan dapat mengalami beberapa refleksi permukaan bawah, dan definisinya hanya relevan pada jarak terkecil. Ini ditunjukkan pada gambar di bawah ini, di mana bagian vertikal dari saluran ditampilkan pada gambar atas, dan dapat dilihat bahwa ketika menentukan sudut vertikal dari salah satu sinyal yang dipantulkan, kesalahan dapat sepenuhnya tidak dapat diterima. Pada saat yang sama, di bagian bawah gambar, di mana tampilan atas ditampilkan, terlihat bahwa semua sinyal yang dipantulkan berasal dari arah horizontal yang sama.
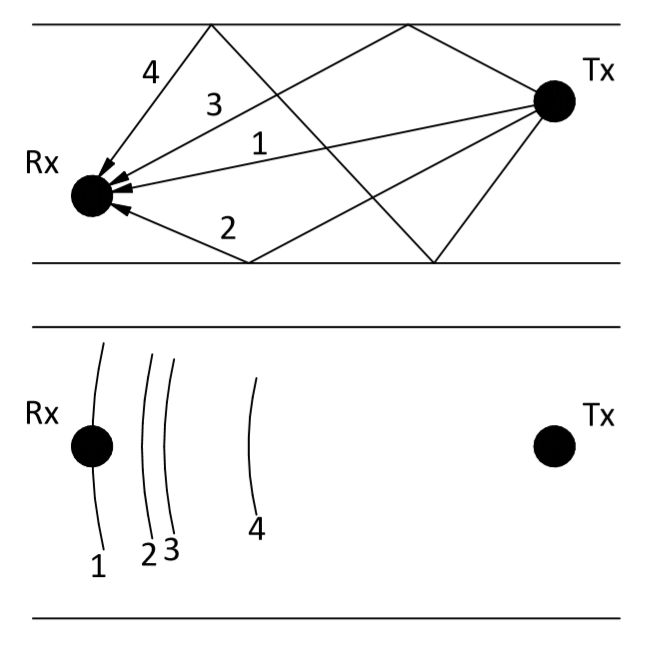 Akurasi yang berbeda dalam menentukan sudut horizontal dan vertikal dalam sistem UKB
Akurasi yang berbeda dalam menentukan sudut horizontal dan vertikal dalam sistem UKBMerangkum diskusi tentang sistem UCB, kita dapat mengatakan bahwa area aplikasi mereka adalah tempat yang sulit, tidak dapat dibenarkan atau tidak mungkin untuk menggunakan jenis lain dari sistem navigasi dan sistem penentuan posisi.
Produsen sistem UKB modern melaporkan keakuratan sudut produk mereka hingga 0,03 ° (1σ)
[8] .
Keuntungan mereka: kecepatan penyebaran dan keserbagunaan.
Dari pengalaman berkomunikasi dengan pengguna, saya dapat mengatakan bahwa semua orang di sekitar hanya menginginkan UKB hanya karena kecepatan penyebaran. Dan tidak peduli seberapa banyak saya menjelaskan, tidak peduli berapa banyak saya menulis, semua orang mengangguk, tetapi mereka masih ingin menggunakan UCB. Seperti kata pepatah: "jangan lupa menderita."
Beberapa yang tidak berpengalaman umumnya menggunakan singkatan USBL sebagai sebutan untuk sistem pemosisian bawah air.
Vogue kutu buku diaKeingintahuan yang lebih aneh adalah ketika sesuatu hidroakustik disebut sonar. Kami adalah orang-orang yang melek huruf, dan kami ingat bahwa sonar seperti radar, hanya dengan suara, yaitu, sonar, tetapi ini adalah cerita yang sangat berbeda.
Sistem basis pendek
Sistem pangkalan pendek di sebagian besar kasus terletak di lambung kapal khusus. Artinya, dimensi garis dasar sebanding dengan dimensi kapal.
Saat ini, keakuratan sistem UHF cukup tinggi, dan kenyamanan penggunaan terlihat jauh lebih menguntungkan daripada untuk KB, yang menyebabkan keluarnya sistem KB dari penggunaan luas, dan tugas yang diselesaikan oleh sistem KB sekarang hanya mencakup mereka yang memiliki kondisi khusus yang tidak memungkinkan. menerapkan sistem UKB.
Namun, di masa lalu, biro desain digunakan, misalnya, untuk mengawal pemandian Triest-1 ke tempat kematian kapal selam Thresher Angkatan Laut AS. Sistem SHARPS SBL KB digunakan di Woods hole Oceanographic Insititution untuk menemani JSON kendaraan laut-dalam ke dudukannya yang menurun MEDEA, akurasi penentuan posisi yang dicapai 0,09 m dilaporkan [9].
Dari sistem KB modern
, ini [10] dapat dicatat, yang diposisikan oleh pabrikan sebagai "GPS Bawah Air" dan didistribusikan sebagai perancang.
Agar mata dapat menangkap dan merasakan semua pesona dan "kesederhanaan" penyebaran, saya akan memberikan beberapa gambar dari pengujian kami baru-baru ini tentang prototipe sistem KB untuk memarkir kendaraan bawah air otonom:

Bingkai aluminium adalah pangkalan pendek. Anda bisa membayangkan kenyamanan meluncurkan desain ini.

Dalam keadilan, perlu dikatakan bahwa sepanjang ideologi kerja, itu harus turun hanya sekali. Kami juga harus menaikkannya selama pengujian - profil membutuhkan biaya, dan hidropon tidak terletak di jalan.
Meringkas tinjauan sistem KB, kami mencatat bahwa:
Kelebihan sistem KB meliputi:
- kecepatan penyebaran dan mobilitas (sistem biasanya dipasang di kapal);
- rata-rata, akurasi lebih tinggi dibandingkan dengan sistem UKB (meskipun, bagaimanapun, harus diingat bahwa beberapa UKB kelas tinggi, misalnya [8] , umumnya menunjukkan akurasi posisi yang lebih besar daripada beberapa KB sederhana seperti GPS Waterlinked yang telah disebutkan sebelumnya [10] ) .
Dengan kontra KB dapat mencakup kerugian yang sama yang melekat dalam sistem UHF, yaitu:
- kebutuhan untuk menentukan orientasi dari dasar pengukuran (garis dasar) - di sudut-sudut saja, berguling dan langsing selain diikat ke posisi geografis absolut;
- korelasi kesalahan dalam menentukan waktu kedatangan pada elemen dasar mengingat hubungan kinematik mereka, misalnya, karena pitching
- dan, karena biro desain umumnya dapat bekerja sebagai sistem goniometrik, biro desain juga tunduk pada masalah penurunan akurasi ketika memindahkan objek yang diposisikan dari pangkalan.
- ( «») .
Ini adalah jenis sistem favorit saya. DB - berarti basis Panjang , bukan apa yang Anda pikirkan . Dimensi garis-garis dasar jauh lebih besar daripada lintasan objek yang diposisikan, dan elemen-elemen dasar tidak terhubung secara kinematis satu sama lain. Sebagai aturan, sebuah pangkalan dapat menjadi bagian bawah, seperti [11] dan [12] , ketika elemen-elemennya terletak di bagian bawah, atau dapat mengambang ketika elemen pendukungnya dilengkapi pelampung yang dilengkapi dengan penerima GNSS, di sini kita dapat mengutip sistem sebagai contoh [13 ] dan [14] , sistem GPS GNSS [15] , GLONASS [16], Galileo [17] , Beidou [18] dan beberapa pendahulunya - sistem DECA [19], Chaika [20] dan LORAN [21].Sistem DB memberikan akurasi maksimum dalam menentukan posisi objek yang diposisikan karena ukuran penting dan sebagian besar tidak memiliki banyak kelemahan sistem UCB dan KB, seperti mengurangi akurasi ketika bergerak menjauh dari pangkalan - DB memberikan rata-rata akurasi yang sama di dalam basis navigasi, dan ketika keluar objek yang diposisikan darinya dapat terus berfungsi sebagai sistem goniometrik.Sistem DB jauh lebih rentan terhadap kesalahan yang terkait dengan propagasi multipath, seperti yang akan ditunjukkan di bawah ini - jika sinar langsung tidak ditentukan dengan benar, perbedaan waktu tempuh bisa kecil (unit meter), yang dapat dengan mudah dikompensasi dengan adanya kelebihan titik referensi, dalam kasus terburuk saja kesalahan dalam menentukan lokasi urutan perbedaan dalam jalur balok, sedangkan UCB dapat memperkirakan sudut kedatangan balok ini, yang bisa berubah menjadi hampir apa saja, yang pada gilirannya mengarah pada kesalahan benar-benar tidak dapat diterima.Dari kekurangan sistem DB, yang utama adalah kompleksitas instalasi, yang terutama berlaku dalam kasus basis bawah - pertama, elemen bawah harus memberikan otonomi yang cukup untuk memaksimalkan interval waktu layanan, dan kedua, karena Sebagai aturan, sistem tersebut beroperasi pada kedalaman yang cukup (dari 500 meter dan lebih), maka persyaratan tambahan dikenakan pada bangunan normobarik, ketiga, ada masalah tambahan untuk memindahkan pangkalan setelah menyelesaikan pekerjaan.Dan akhirnya, setelah menginstal basis, lokasi elemen-elemennya harus ditentukan dengan akurasi geodetik, misalnya, menggunakan metode DB virtual atau sistem UCB menggunakan banyak pilihan pengukuran.Semua operasi ini membutuhkan peralatan khusus yang mahal dan tenaga kerja dari banyak spesialis yang berkualifikasi tinggi.Jauh lebih sederhana dengan alas mengambang. Hidroakustik menerima, mentransmisikan atau menerima dan mentransmisikan pelampung dapat dipasang dari hampir semua perahu (kami mengatur sendiri dalam 15 menit dari perahu karet dayung), karena kemudahan pemasangan dan pelepasan, elemen pendukung dapat memiliki sedikit otonomi, dan lambungnya umumnya dapat dibuat atmosfer. kinerja.Perlu dikatakan bahwa penggunaan pangkalan terapung sangat rumit ketika bekerja pada kedalaman yang sangat besar karena dua alasan: yang pertama adalah kesulitan memasang jangkar, yang pada prinsipnya dipecahkan oleh pangkalan terapung bermotor, yang menjamin pelestarian otomatis posisi geografis, dan yang kedua lebih serius, dan yang kedua lebih serius, dan seringkali tidak termasuk penggunaan pangkalan terapung ketika bekerja pada kedalaman yang sangat tinggi - kehadiran pantulan internal total sinyal dari lapisan lompat (artinya lapisan lompatan dalam kecepatan suara. Pemisahan lapisan air dengan berbagai kepadatan, dari mana suara dapat sepenuhnya tercermin).Satu-satunya solusi di sini adalah menghapus antena hidroakustik di bawah lapisan lompatan, yang pada gilirannya menciptakan lebih banyak masalah - kompleksitas posisi topografi antena hidroakustik, berat kabel, desain yang sangat rumit, dan di sinilah kita lagi di mana kita mulai.Secara tradisional, sebagai contoh visual, saya membawa sistem RedWAVE DB kami, pelampung (penyelam unik dan tidak termasuk): Dan penerima navigasi:
Dan penerima navigasi:
Kami memiliki beberapa artikel tentang sistem ini. Sistem Basis Panjang Virtual
Sistem berdasarkan apa yang disebut virtual long base [22] [23] [24] (VDB, Bahasa Inggris VLBL - virtual long baseline) layak untuk dialokasikan sebagai kelompok terpisah untuk alasan desain dan tata letak.Inti dari sistem VDB adalah bahwa rentang yang cenderung ke transponder atau waktu kedatangan sinyal pinger diukur pada titik yang berbeda di ruang angkasa, pendekatan ini benar jika satu kondisi terpenuhi: objek yang diposisikan mempertahankan posisi tetap, dan titik referensi bergerak membentuk elemen-elemen dari basis navigasi dengan membuat atau mengukur jarak. kepada terdakwa atau memperbaiki waktu kedatangan sinyal pinger dari posisi yang berbeda.Kelas sistem navigasi ini, dengan segala keterbatasannya, memiliki prospek terluas: pertama, tidak diperlukan peralatan rumit, seperti misalnya dengan sistem UXB - tugas diselesaikan secara nominal hanya dengan dua transceiver atau dengan pemancar dan penerima, yang tidak diperlukan oleh apa atau dengan cara khusus untuk mengarahkan ruang. Dalam kasus pinger, dimungkinkan untuk mengatur pencarian kooperatif untuk pinger menggunakan kawanan kendaraan permukaan otonom. Hal ini terutama berlaku ketika mencari benda yang tenggelam (misalnya, pesawat atau kapal yang jatuh) pada area yang secara teori tidak terbatas. Juga, salah satu metode untuk awalnya menentukan lokasi elemen-elemen dari basis panjang bawah adalah metode WDB.Sebagai contoh, saya akan memberikan proyek demo kami (bahkan dua!) Dari basis panjang virtual pada dua modem mikro uWAVE.Proyek pertama dijelaskan dalam salah satu dari kami sebelumnya artikel . Di sana, modem, modul GNSS, dan modul radio digabungkan menggunakan papan pada STM32.Dalam reinkarnasi baru dari proyek ini, kode tersebut ditulis ulang untuk Arduino UNO, dan solusi untuk masalah navigasi dilakukan dalam aplikasi open source .Sistem gabungan
Sistem gabungan biasanya berisi elemen dari dua atau lebih kelas sistem. Jadi, misalnya, ada solusi teknis yang dijelaskan dalam ulasan [1] menggabungkan pangkalan panjang yang dapat digunakan dan pangkalan pendek yang dipasang di kapal, tugas utamanya adalah memposisikan elemen-elemen dari pangkalan panjang. Jelas, penempatan elemen-elemen dari basis yang panjang juga dapat dilakukan dengan bantuan sistem UKB.Secara umum, dapat dinyatakan bahwa pilihan skema sintesis tertentu ditentukan, anehnya, oleh masalah yang dipecahkan.Dalam sebagian besar kasus, tujuan sintesis berbagai kelas sistem adalah penentuan posisi awal titik-titik dukungan dari basis yang panjang.Eksotis
Di sini kami hanya secara singkat menyentuh beberapa kelas sistem, segera setelah secara tidak langsung dan resmi terkait dengan topik artikel.Di antara mereka, sistem akustik berdasarkan perhitungan mati dibangun di atas apa yang disebut Doppler tertinggal, perangkat yang mengukur kecepatan objek pemosisian relatif ke bawah dengan memancarkan sinyal akustik pada setidaknya tiga sinar yang diarahkan secara sempit dan penerimaannya selanjutnya. Pergerakan objek relatif ke bawah menyebabkan munculnya pergeseran frekuensi Doppler dari sinyal yang dipancarkan yang terdeteksi pada tahap penerima.Pergeseran Doppler dihitung ulang dalam proyeksi kecepatan sepanjang tiga sumbu. Dalam kombinasi dengan pembacaan sensor pos (kompas) dan pembacaan accelerometer, urutan keputusan dibentuk untuk lokasi objek. Inisiasi urutan ini membutuhkan pemosisian awal. Jenis sistem ini terutama memiliki aplikasi militer mengingat kerahasiaan dan otonomi relatif. Ini memiliki semua kelemahan sistem perhitungan mati yang terkait dengan akumulasi kesalahan yang cepat. Yaitu
akurasi menurun seiring waktu.Masih ada yang eksotis-eksotis dan cukup eksotis. Untuk yang pertama, saya akan merujuk sistem berdasarkan analisis gambar bawah ( CARL! ), Dan yang kedua, navigasi melalui fluktuasi medan magnet ( CARL !!! ). Mengenai penerapan praktis keduanya, saya ingin, seperti yang mereka katakan, "untuk menyatakan keprihatinan serius."Dalam residu kering
Jadi, dalam klasifikasi yang ada ada tiga kelas utama sistem navigasi sonar:- , - . , , , . [1] 0.5-0.2% .
- , ( ) , ; , -, , [1] , 0.5% ;
- Long-baseline, di mana lokasi objek ditentukan oleh tiga atau lebih rentang yang cenderung (atau perbedaan), diukur menjadi tiga atau lebih titik referensi spasi luas. Kelas sistem ini sulit digunakan dan dipelihara, dapat diimplementasikan dalam dua versi yang sangat berbeda - dasar dan dasar mengambang, dan, menurut penulis [1], memiliki akurasi maksimum dibandingkan dengan kelas sistem lainnya - sekitar 0,1% dari kedalaman tempat. Di tempat yang sama, dalam tinjauan Vickery yang telah saya hapus, nilai absolut dari kesalahan penentuan posisi objek yang diposisikan dilaporkan untuk sistem yang beroperasi dalam rentang frekuensi yang berbeda - mulai dari 2-3 meter untuk sistem frekuensi rendah (hingga 15 kHz), hingga 1 meter untuk sistem frekuensi menengah (19-36 kHz) dan hingga 5 cm untuk sistem yang beroperasi pada frekuensi 50 hingga 110 kHz.
PS
Terima kasih banyak atas perhatian Anda, kami akan senang mendengarkan kritik yang membangun dan menjawab pertanyaan.
Jika artikel ini akan menimbulkan minat di kalangan pembaca, maka di berikutnya saya berencana untuk berbicara tentang klasifikasi yang benar dari sistem navigasi bawah laut.
Jika semuanya berjalan dengan baik, maka dalam artikel lain saya akan menganalisis beberapa algoritma untuk pengoperasian sistem navigasi dengan contoh kode.
Daftar sumber- Vickery, K. (nd). Sistem penentuan posisi akustik. Tinjauan praktis sistem saat ini. Prosiding Lokakarya 1998 tentang Kendaraan Bawah Air Autonomous (Kat. No.98CH36290).
- Diogenes Laertius. Kehidupan dan Pendapat Para Filsuf Terkemuka oleh Diogenes Laertius (Terjemahan oleh Yonge, CD). London: George Bell dan putra, 1905. Google buku. Web 01 Apr. 2019.
- Frankland, William B., Buku Pertama Elemen Euclid: Dengan Komentar Berdasarkan Pada Dasarnya dari Proclus Diadochus. Cambridge: di University Press, 1905 .
- Keterbatasan Akurasi Sistem Multilaterasi Hiperbolik, Harry B. Lee, Institut Teknologi Massachusetts, Laboratorium Lincoln, Catatan Teknis 1973-11, 22 Maret 1973
- evologics.de/usbl
- www.tritech.co.uk/media/products/usbl-tracking-system-micronnav.pdf
- www.ixblue.com/products/posidonia
- www.ixblue.com/sites/default/files/2018-02/Gaps.pdf
- Mengintegrasikan Posisi Relatif Presisi ke Dalam Operasi JASON / MEDEA ROV, Bingham et al., MTS Journal Spring 2006 (Volume 40, Nomor 1)
- waterlinked.imtqy.com/docs/explorer-kit/introduction
- www.ixblue.com/sites/default/files/2019-01/Ramses%20-%20Datasheet.pdf
- evologics.de/web/content/16763?unique=cc5bc295cb0a4bf681a31de24fdb204f62169c2b&download=true
- github.com/ucnl/Docs/blob/master/RU/RedWAVE/RedWAVE_LBL_Deployment_maintenance_RedNAV_ru.pdf
- www.alseamar-alcen.com/sites/alseamar-alcen.com/files/pdf/products/fiche_205x292_gib-sar.pdf
- www.gps.gov/technical/ps/2008-SPS-performance-standard.pdf
- "GLONASS Sistem Navigasi Global: Pengembangan dan Penggunaan di Abad ke-21." Pertemuan Time Interval Waktu dan Waktu (PTTI) Tahunan ke-34. 2002.
- download.esa.int/docs/Galileo_IOV_Launch/Galileo_factsheet_2012.pdf (PDF). ESA 15 Februari 2013. Diakses tanggal 8 Desember 2019.
- "Petunjuk 2017: Jalan BeiDou menuju layanan global." Dunia GPS. 6 Desember 2016.
- Derek Howse, Radar At Sea. Macmillan Press, Britania Raya 1993. ISBN 1-55750-704-X
- GOST R 54025-2010 Sistem navigasi radio "The Seagull". Perangkat penerima. Persyaratan untuk spesifikasi teknis. Metode pengujian dan hasil tes yang diperlukan
- Pengembangan Navigasi dan Pengaturan Waktu Loran-C, Gifford Hefley, Biro Standar Nasional AS, Oktober 1972.
- MB Larsen, "Navigasi Baseline Sintetis Panjang Kendaraan Bawah Air," disajikan pada Konferensi dan Pameran MTS / IEEE, 2000 Oceans, 2000.
- JoÃo Saúde, Antonio Pedro Aguiar, Navigasi Akustik Beacon Tunggal untuk AUV di hadapan arus laut yang tidak diketahui, IFAC Proceedings Volumes, Vol. 42, Edisi 18, 2009, hlm. 298-303, ISSN 1474-6670, ISBN 9783902661517, doi.org/10.3182/20090916-3-BR-3001.0057 .
- Alexander Dikarev, Stanislav Dmitriev, Vitaliy Kubkin, Andrey Vasilenko. Perkiraan posisi sensor bawah air otonom menggunakan metode baseline panjang virtual, International Journal of Wireless & Mobile Networks (IJWMN), Vol. 11, Edisi 2, April 2019