Kami suka robot. Kami adalah mahasiswa universitas teknik, perancang, insinyur elektronik, programmer, dan kami semua senang membuat robot. Dua tahun lalu, tim setUP kami muncul atas dasar laboratorium robotika Sberbank dan pada saat yang sama ikut serta dalam kompetisi untuk menciptakan robot otonom bergerak Eurobot Open untuk penggemar robotika muda. Saat ini, tim bermain 2 musim, dua kali menjadi wakil juara, memasuki panggung internasional. Kami tidak tidur selama berhari-hari, memprogram, menyolder, mengumpulkan dan membongkar robot kami, menemukan masalah serius satu jam sebelum kompetisi, dan kemudian mereka masih mulai. Kami juga mendapatkan pengalaman yang tak terlupakan dan mendapatkan sejumlah solusi menarik, yang ingin kami bicarakan dalam serangkaian artikel (dengan banyak GIF, dengan hati-hati, lalu lintas).

Eurobot Open adalah kompetisi robot otonom internasional. Tugas, medan perang, dan elemen permainan berubah setiap tahun, tetapi esensinya tetap sama - tim harus membuat dua robot otonom yang akan bersaing dengan robot lawan di bidang kecil untuk sumber daya terbatas selama 100 detik. Proposal singkat ini menyembunyikan sejumlah besar tugas yang harus diselesaikan oleh tim, karena robot harus cepat, bermanuver, dapat melakukan tugas secara mandiri dan tidak menghadapi musuh. Dan setiap tahun perlu untuk mengembangkan robot baru. Meskipun demikian, pengalaman dan prestasi tahun-tahun sebelumnya dapat memberikan keuntungan besar. Dari tahun ke tahun, kita membutuhkan sistem pelokalan, prediksi pergerakan musuh dan menghindari tabrakan, perencana rute, sistem manajemen perilaku yang fleksibel, elektronik dan mekanik kita sendiri. Ya, untuk banyak hal ini terdapat algoritma dan pustaka standar, namun sebagian besar masih harus dimodifikasi atau ditulis dari awal karena kekhususan fungsi dan persyaratan untuk konsumsi sumber daya.
 Tim kami di final Rusia di Moskow.
Tim kami di final Rusia di Moskow.Video keren tentang partisipasi kami di 2019:
Tema permainan utama pada tahun 2019 adalah Energi Nuklir. Tetapi ini tidak berarti bahwa tim diminta untuk membuat robot yang ditenagai oleh mesin nuklir. Hanya tugas dan elemen gim yang berbeda diberi nama tematik. Satu-satunya objek permainan manipulasi adalah hoki pucks - elektron. Mereka memiliki bobot berbeda, warna berbeda, dan satu, "emas", dengan ukuran berbeda. Perlu untuk mengumpulkan maksimum mesin cuci yang terletak di tempat yang berbeda dari lapangan, di posisi yang berbeda, pada ketinggian yang berbeda, dan kemudian memilah mereka ke dalam zona di lapangan, tergantung pada apa jenis elemen kimia itu.
 Inilah yang tampak seperti lapangan pada 2019.
Inilah yang tampak seperti lapangan pada 2019.Nama kode untuk robot kami tahun ini adalah Chip dan Dale. Mengapa Saya pikir jawabannya jelas dari foto:
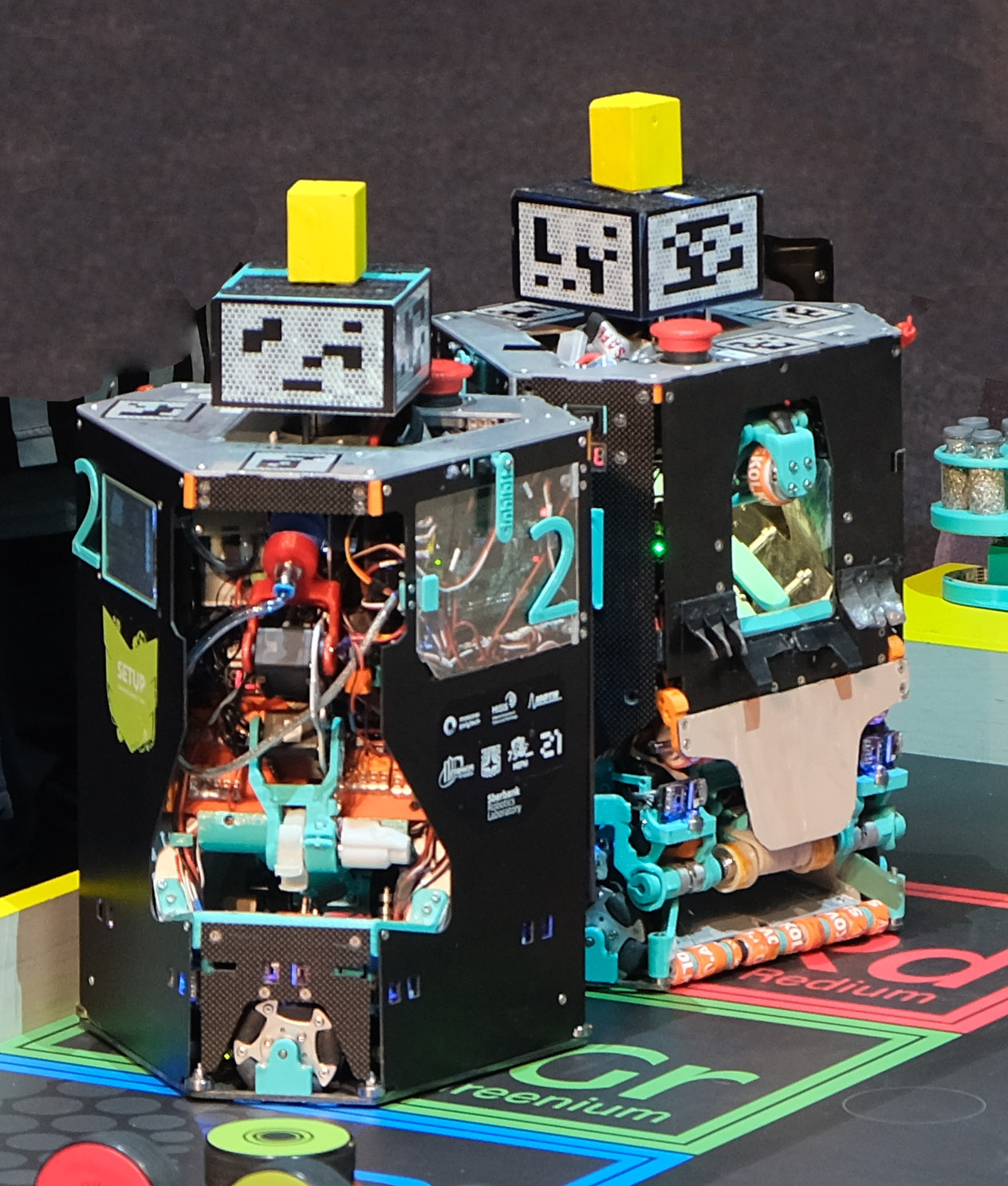
Mari kita membahas solusi teknis dasar dalam robot kami musim lalu. Tahun ini kami berusaha semaksimal mungkin untuk menyatukan semuanya dan kami memiliki dua robot kembar. Diagram struktural robot kami pada gambar di bawah ini.
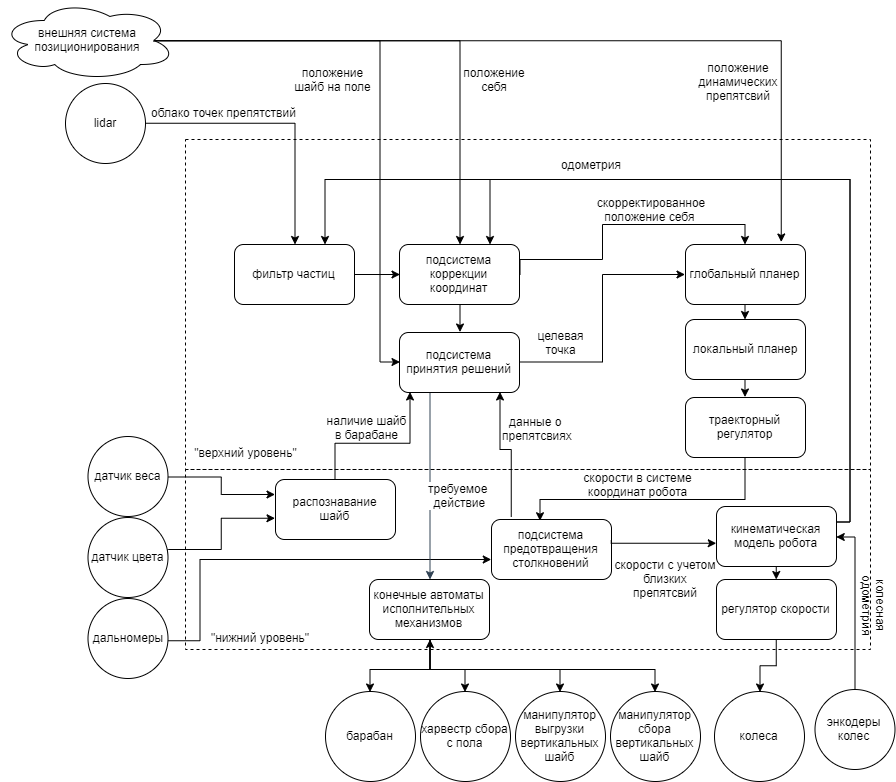
Level atas diwakili oleh Odroid xu4 papan tunggal yang diuji dengan ubuntu 16.04 dan ROS Kinetic on board. Semua tugas "sulit" berputar di atasnya.
Pada level yang lebih rendah, STM32F407VGTX-DISC1 berfungsi, terjebak dalam pelindung yang dirancang sendiri yang memungkinkan Anda untuk dengan mudah menghubungkan selusin motor, serv, dan rangkaian sensor. Ngomong-ngomong, mereka selalu mendapatkan jumlah yang mengesankan. Setiap robot kami berisi lidar, 7 motor dc / bldc, 9 servos dan sekitar 25 sensor berbeda (warna, bobot, jarak, arus). Dan semua ini, ditambah 6 mekanisme volumetrik lainnya, ditempatkan dalam robot kompak dengan perimeter 850 dan tinggi 350 mm. FreeRTOS, yang melayani tugas yang membutuhkan eksekusi real-time, pemrosesan semua sensor dan mesin negara, berputar pada STM itu sendiri.
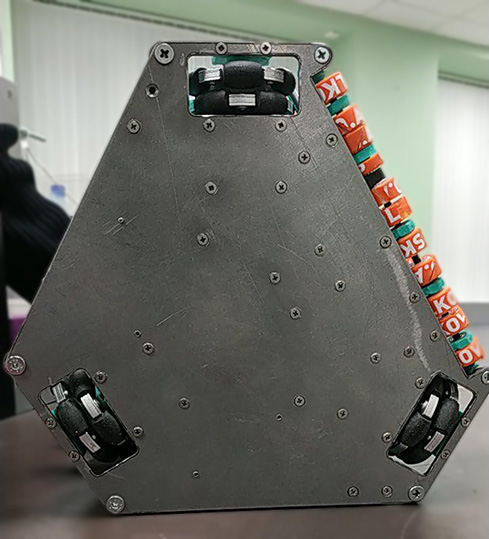 Lihat omnicholes robot.
Lihat omnicholes robot.Fitur yang menarik adalah penggunaan platform roda omni sebagai drive, yang memungkinkan kita untuk mengemudi ke segala arah dan di kedua sisi tanpa melakukan putaran yang tidak perlu, yang secara dramatis meningkatkan kemampuan manuver robot.
Jadi, misalnya, dalam video berikutnya dari pertandingan yang diadakan di Prancis, dapat dilihat bagaimana, terlepas dari kenyataan bahwa kami diblokir (karena pelanggaran berat terhadap aturan oleh lawan), robot keluar dari perangkap perhiasan.
Namun, karena omni, keakuratan odometry roda sangat timpang: roda tidak bulat sempurna, roller berputar dan memiliki titik kontak kecil. Untuk mengatasi masalah ini, Anda dapat secara berkala membentur dinding, mengatur ulang kesalahan, atau menerapkan sistem penyesuaian eksternal. Relatif sering, Lidar ditempatkan pada robot untuk ini. Solusi lain muncul beberapa tahun yang lalu: tempat ditambahkan ke bidang di mana Anda dapat meletakkan kamera. Tahun lalu, kami melakukan perjalanan hanya melalui kamera eksternal dengan deteksi penanda aruco yang diterapkan pada robot, tetapi dalam hal ini kami secara bersamaan bekerja pada pelokalan menggunakan lidar pada robot dan kamera eksternal (lokalisasi dan navigasi akan segera menjadi artikel menarik lainnya). Kami tidak punya waktu untuk menguji lidar, jadi kami berkeliling kamera dan menggunakan lidar sebagai dudukan untuk arucomarker. Keuntungan dari sistem - kita tahu posisi semua robot di lapangan. Dari minus - sensitivitas tinggi terhadap cahaya eksternal dan akurasi kalibrasi, yang, sayangnya, telah gagal kami lebih dari sekali. Tetapi secara umum, kombinasi odometry dan detektor arude memungkinkan kita untuk memposisikan diri kita dengan akurasi beberapa milimeter pada bidang 2x3 meter.
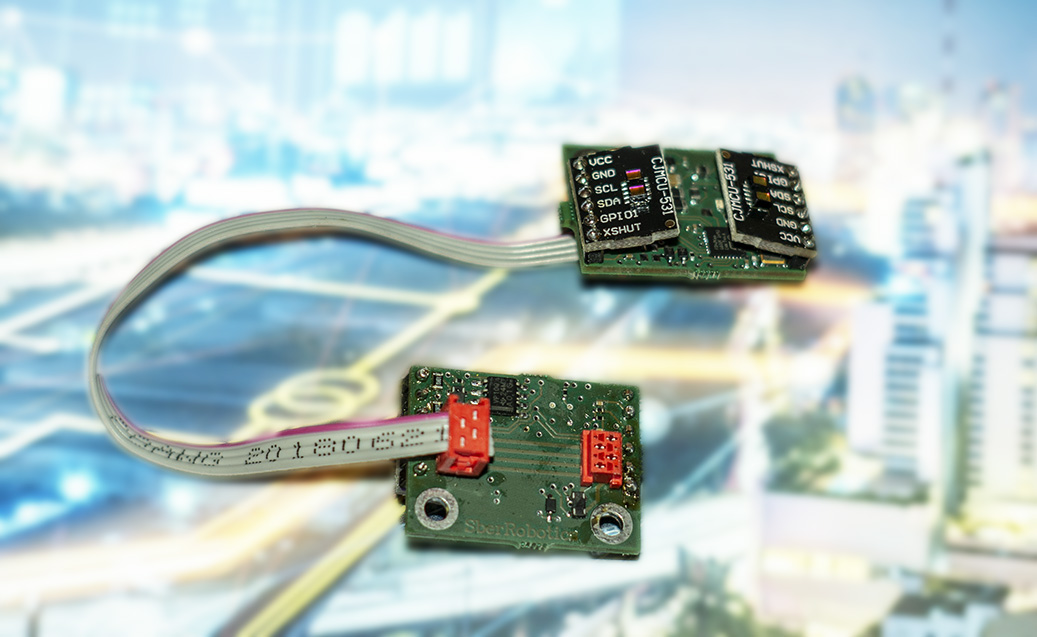 Papan pengintai yang dikembangkan kami.
Papan pengintai yang dikembangkan kami.Aturan melarang tabrakan dengan robot lain (untuk ini mereka juga dapat didiskualifikasi), oleh karena itu penting bagi robot untuk melihat hambatan di jalurnya tepat waktu. Biasanya, untuk memantau zona dekat, ambang batas biasa IR range finder atau Sharp GP2Y0A21YK dipasang, yang sangat sensitif terhadap permukaan, misalnya, mereka dapat bekerja pada aluminium yang dipoles dari setengah meter dan masih tidak melihat karbon dalam fokus. Pengukur jarak ultrasonik juga sering digunakan, tetapi mereka peka terhadap sudut permukaan pantulan dan takut akan saling mengganggu. Baru-baru ini, pencari rentang ToF, misalnya, VL53l0x atau VL53l1x, dengan cepat mendapatkan popularitas. Setelah mencoba sensor-sensor ini sekali, sulit untuk menolaknya - mereka memiliki ketergantungan yang lemah pada bahan penghalang, akurasi tinggi, kekompakan, harga rendah. Namun, tahun lalu kami mencoba menggunakan VL53l0x dan sejumlah nuansa muncul. Apa yang bisa terjadi ketika Anda menempatkan selusin pengukur jarak pada i2c, di antara banyak motor dan server? Selain itu, sensor tidak dapat mengatur alamat yang konstan, baik, dan ceri di hang phantom mereka. Oleh karena itu, tahun ini kami beralih ke rs485, yang sangat menyederhanakan penggunaan pengukur jarak. Dalam foto-foto robot, lampu biru adalah mereka.
Di sini kita dengan segala cara mencegah robot dari langsung antara dua titik, dan itu ternyata lebih pintar dari kita:
Menggunakan sistem pelokalan eksternal, glider lengkap, serta penghindaran benturan hebat di dekat zona memungkinkan Anda melakukan hal-hal ini dengan kecepatan 1m. Pada artikel berikutnya, kami akan mencoba untuk memberi tahu secara maksimal tentang hal-hal paling menarik dari keputusan kami (dan membuka landasan), tetapi hari ini kami ingin berbicara tentang fitur mekanika tahun ini.
Desain mekanik untuk Eurobot dibedakan oleh kekhususannya. Pertama, karena ini adalah kompetisi, semuanya harus bekerja secepat mungkin dan seratus persen dapat diandalkan. Kedua, tugas diatur sehingga semakin banyak poin yang ingin Anda peroleh, semakin sulit mekanik perlu mendesain. Dan semakin rumit mekanika, semakin besar kemungkinan kegagalannya, yang, menurut hukum Murphy, akan terjadi pada saat yang paling tidak tepat.
Tugas mungkin tampak sederhana pada pandangan pertama, tetapi ini sama sekali tidak terjadi: tugas memanipulasi objek (untuk mengambil, mengatur ulang, mengatur) masih sangat sulit untuk diselesaikan. Tidak seperti manipulator industri, yang biasanya terletak secara statis, yang memiliki semua koordinat bergerak, dan yang bekerja dalam kondisi ideal, semuanya lebih dingin: Saya meletakkan robot di lapangan, menarik kunci dan robot bekerja hingga perlombaan berakhir. Kemungkinan semacam penyesuaian koordinat dan debugging tambahan praktis tidak ada. Hal ini diperlukan untuk memperhitungkan kemungkinan kesalahan pelokalan yang serius atau ketidakakuratan dalam pembuatan lapangan (misalnya, robot berpikir bahwa itu menghadapi keping yang akan diambil, tetapi sebenarnya itu diimbangi x 15 mm dari koordinat yang diperlukan), jadi taruh manipulator dengan pegangan yang rapi, bergerak dari titik ke titik tidak akan berhasil: dalam kondisi persaingan yang sebenarnya Anda akan mengalami masalah serius.
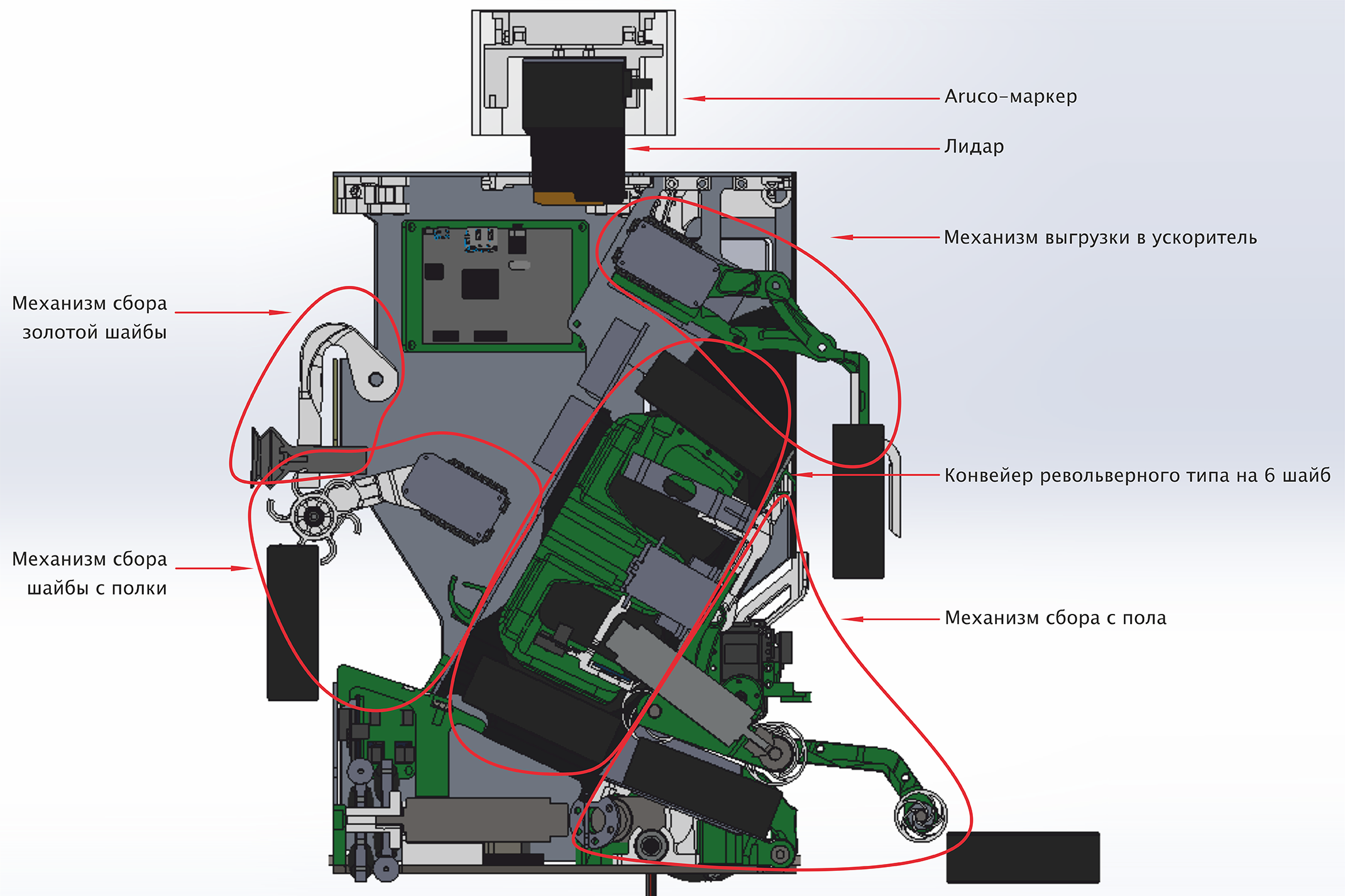 Susunan mekanisme pada robot.
Susunan mekanisme pada robot.Kami berhasil membangun dua robot identik, yang masing-masing menyelesaikan berbagai tugas yang mungkin dalam kerangka kompetisi. Robot tersebut menampung konveyor tipe revolving dengan 6 mesin cuci, dan kapan saja kami dapat menurunkannya. Di lapangan, mesin cuci berada di dua posisi: berbaring di lantai dan berdiri di rak khusus. Untuk setiap opsi telah dirancang mekanisme pengumpulannya sendiri. Mesin cuci dari rak dirakit menggunakan roller flap khusus yang melemparkan mesin cuci ke jalan, di sepanjang jalan mesin cuci melaju ke sel bawah revolver, setelah warna terdeteksi, revolver digulir, dan robot menarik ke mesin cuci berikutnya.
Kerangka pendukung robot terbuat dari lembaran aluminium dan 204 bagian yang dicetak, 6 unit Dynamixel AX-12A, satu Dynamixel MX-64 dan dua sembilan gram, 3 buah maxonmotor 16mm dan satu maxonmotor 22mm bertanggung jawab atas mekanisme tersebut. Chassis terdiri dari tiga omnicholes maxonmotor 22mm dan
60mm . Semua ini dibumbui dengan 106 bantalan.
Mengapa dinamixels dan bukan servos standar? Mereka memiliki banyak perlindungan, kontrol digital dan banyak pengaturan, koneksi serial yang nyaman dan kualitas yang umumnya baik. Pengalaman kami juga menunjukkan bahwa servos murah per musim berubah dalam lingkaran beberapa kali, sedangkan servos mahal harganya hampir sama.

Karena sebagian besar mesin cuci di lantai tidak dalam koordinat tertentu, tetapi secara acak terletak di dalam zona tertentu, sulit untuk menggunakan manipulator, sehingga mekanisme khusus untuk menyerap mesin cuci dikembangkan.
Mesin cuci dibongkar dalam dua zona: pada skala, di mana mesin cuci dapat jatuh di posisi apa pun, dan di zona akselerator, di mana mesin cuci ditempatkan di posisi vertikal. Di sini robot idealnya membongkar semuanya ke akselerator di bidang rumah (yang merupakan 90% dari kasus):
Namun, dalam balapan yang menentukan, ini, sayangnya, berhasil sekali.
Saat menurunkan ke akselerator, dimungkinkan untuk segera melepaskan mesin cuci pada permukaan yang miring, dan pertama-tama letakkan di permukaan horizontal, kemudian dorong ke permukaan yang miring. Opsi kedua memungkinkan Anda untuk melemparkan dua gol lagi dan mencetak lebih banyak poin. Karena itu, opsi ini dipilih, yang ternyata kemudian merupakan kesalahan kritis. Sangat sulit untuk naik ke dinding, membuang keping, membuangnya dengan roller dan mengulanginya lagi. Mesin cuci dapat berdiri dengan bengkok, tidak mempercepat, menabrak dinding dan, yang paling penting, menghalangi jalannya mesin cuci berikutnya.
Seperti yang ditunjukkan oleh pengalaman kompetisi dan, khususnya, keputusan konstruktif dari tim lain, semakin sederhana keputusan dalam mekanika, semakin baik. Solusi saat ini membutuhkan kerja yang terkoordinasi dan tidak lengkap dari sejumlah besar mekanisme kompleks, kegagalan yang salah satunya menyebabkan kegagalan fungsi seluruh sistem, dan ini, seperti yang diketahui
dari teori keandalan , tidak terlalu keren. Selain itu, mekanik memerlukan penyesuaian reguler dan perbaikan kecil, yang menghentikan proses debugging perangkat lunak pada robot. Di mana lebih baik untuk membuat robot dengan satu cangkir hisap pada tuas tautan tunggal, yang menempatkan mesin cuci di tumpukan, tetapi memenuhi dalam seratus persen kasus sebagaimana dimaksud. Di sisi lain, partisipasi dalam kompetisi dapat dianggap tidak hanya sebagai kompetisi penilaian, tetapi sebagai cara yang baik untuk menerapkan solusi teknik yang paling menarik dan keren.
Secara umum, terlepas dari kinerja yang tidak terlalu sukses di Prancis, kami senang dengan hasilnya. Kami belajar banyak pelajaran: bahwa keadaan kesiapan tugas bukanlah parameter biner, bahwa kecepatan pengembangan sering berbanding terbalik dengan jumlah orang yang terlibat, bahwa sederhana dan khusus dalam mekanisme tugas kecil dan modul bisa lebih baik daripada kompleks dan, secara teori, ide-ide indah. Dan bersiap-siap untuk musim baru.
Tautan video dan ulasan mendalam lainnya:
Halaman aturan resmi Eurobot .
Ulasan terperinci dari mentor tim .
Eurobot bukan satu-satunya hal yang dapat dilakukan peserta pelatihan di Sberbank Robotics Laboratory, ada magang lain, misalnya, dalam manipulasi intelektual objek, robot seluler, robot antropomorfik pada platform iCub. Dan Anda dapat melakukan penelitian bersama, menulis diploma, gelar master (jika ini bersinggungan dengan tema lab). Kirim CV dan aplikasi Anda dalam bentuk gratis ke robotics@sberbank.ru
Telegram Kami:
t.me/SetUpSber