Salam sayang!
“Jika, dalam menanggapi permintaan teman atau musuh, itu tidak benar untuk menjawab, permintaan kedua akan datang pada frekuensi 533 ” (C)
“Semua ini entah bagaimana melewati kamu. Atau melalui kamu. Dan bagi saya itu seperti mesin giling. Tidak ada satu tulang pun yang tersisa. "(C) A. dan B. Strugatsky," City Doomed "
Pernahkah Anda bertanya-tanya bagaimana Anda akan terlihat di bawah air, baik, katakanlah, tinju atau berjalan?
Sebelum kami benar-benar punya waktu untuk menikmati semua pesona Internet, hal
itu sudah menjadi penghenti ketika mempertimbangkan aplikasi untuk hibah ilmiah, karena publikasi ilmiah dan tidak begitu mulai muncul tentang bagaimana menahan serangan cyber pada sistem penentuan posisi sonar, dan (oh tuhan! ) ke jaringan bawah laut sensor otonom!
Hanya beberapa paragraf ketegangan teknis dan saya berjanji untuk menjelaskan semuanya.

Anda baik-baik saja, Anda duduk di sisi lain monitor dan membaca analitik lain. Dan saya masih merasa malu palsu ketika saya menjawab pertanyaan tentang apa yang saya lakukan. Anda tahu, banyak yang bahkan tidak curiga bahwa pengiriman data di bawah air adalah semacam masalah. Atau, katakan bahwa GPS tidak berfungsi di bawah air.
Apa yang sedang terjadi
Ayo segera nyatakan kondisinya. Memiliki sesuatu untuk diandalkan. Sekarang saya akan memberi Anda beberapa trik untuk memperkirakan "dengan mata".
Pita frekuensi yang sangat
sempit tersedia untuk komunikasi sonar, kira-kira - dari satuan hingga puluhan kilohertz. Suara pada frekuensi yang berbeda memudar dengan tidak merata.
Jika kita mengambil laut "rata-rata", koefisien atenuasi:
- untuk suara dengan frekuensi 1 kHz adalah sekitar 0,1 dB / km
- untuk suara dengan frekuensi 10 kHz - 1 dB / km
- dan untuk suara dengan frekuensi 100 kHz - tanpa ampun 10 dB / km.
Apa artinya ini? Ini berarti bahwa jika Anda bekerja dengan sinyal broadband, maka
bagian spektrum yang berbeda akan menyebar sangat berbeda .
Saya setuju, desibel-desibel ini juga selalu membingungkan saya dan "memarahi akar hertz."
Jika semuanya sangat disederhanakan, maka rentang komunikasi rata-rata:
- pada frekuensi di wilayah 1 kHz dapat mencapai puluhan kilometer (dengan persentase keberuntungan - ratusan)
- pada frekuensi urutan 10 kHz - 10 kilometer
- dan pada frekuensi di wilayah ratusan kilohertz - ratusan meter, dan Allah melarang jika setidaknya tidak ada yang berhasil.
Formula yang sangat kasar untuk memperkirakan frekuensi sinyal untuk mencapai kisaran yang diperlukan adalah sebagai berikut:
$$ display $$ kHz = 40 / km ^ {2/3} $$ display $$
Atau, jika Anda perlu mengetahui kisaran apa yang secara teoritis sinyal dari frekuensi yang diberikan akan memberikan:
$$ display $$ km = (40 / kHz) ^ {3/2} $$ display $$
Dalam kisaran dari 1 hingga 100 kHz, formula ini kurang lebih benar.
Pada frekuensi urutan 20 kHz, jangkauan komunikasi 2-3 km dapat diharapkan, dan pada frekuensi di wilayah 100 kHz - 300 meter. Hal-hal seperti itu.
Suara bising, dari potongan logam besar, biasanya frekuensi rendah dan menyebar ke jarak jauh.
Jika kita ingin mengirimkan data digital, maka dari pertimbangan humanistik yang paling umum, dengan optimisme yang lumayan, kita dapat berharap untuk kecepatan transmisi 5 kbps per 10 kHz, asalkan bandwidth sinyal di atas 10 kilohertz.
Kecepatan suara rata-rata 1.500 m / s. Ini berarti bahwa untuk setiap rentang satu setengah kilometer, penundaan yang terkait dengan kecepatan perambatan sinyal akan meningkat sebesar 1 detik.
Mari kita memahami jumlah ini. Jika kami mentransfer beberapa jenis permintaan untuk, katakanlah,
10 kilometer , maka kami dapat menerima jawabannya tidak lebih awal dari
14 detik . Dalam salah satu percobaan, sinyal respons diharapkan selama lebih dari dua setengah menit, karena pelanggan berada pada jarak 120 kilometer.
Saya sekarang bahkan tidak menyentuh masalah yang terkait dengan fakta bahwa kecepatan suara sangat tergantung pada kepadatan air. Lapisan air dengan kepadatan berbeda tidak bercampur di lautan dan suara dapat sepenuhnya tercermin dari batas dua lapisan, yaitu di suatu tempat, sinyal tidak akan pergi ke tempat yang dibutuhkan. Tanpa hambatan yang terlihat.
Kebisingan, Multipath, dan Doppler. Semua laut, samudera, dan sungai bising. Terutama kuat pada frekuensi di bawah 10 kHz. Suara dipantulkan dari bawah, detail lansekap bawah air, permukaan, pantulan dijumlahkan pada titik penerima, lintasan ombak yang tertekuk akibat pembiasan. Modem hidroakustik dapat tetap terhubung sejauh bermil-mil, tetapi tidak saling mendengar melalui lapisan rumput laut yang rapat, berjarak satu meter dari satu sama lain.
Baik jika kita mencoba bekerja di laut dalam. Sebagai contoh, kedalamannya adalah satu kilometer, jaraknya 10, secara proporsional seperti bak mandi. Di bawah ini, dalam gambar dari Wikipedia, penelusuran sinar terlihat:

Tapi bagaimana dengan badan air yang dangkal? Musim panas sebelumnya, rekan-rekannya bekerja pada jarak 800 meter dengan kedalaman 4 meter. Secara geometris - ini adalah genangan air di trotoar. Rasio jarak ke kedalaman 200: 1. Bayangkan berapa kali suara akan memantul ke bawah dan bagaimana itu akan terbentuk pada titik penerima.
Semua ini mengarah pada kenyataan bahwa saluran komunikasi hidroakustik sangat kompleks dan sangat tidak stabil.
Jaringan Sensor?
Ungkapan yang bertugas terdengar seperti bahwa 95% dari seluruh lautan tidak diketahui oleh kita. Sangat menggoda untuk menempatkan beberapa "simpul" di bagian bawah (atau bahkan di kolom air) yang mengukur beberapa parameter lingkungan, terakumulasi dan, sesuai permintaan, memindahkan mereka di suatu tempat di sepanjang rantai. Misalnya - pada kapal ilmiah
militer yang lewat di atas mereka.
Konsumsi daya realistis rata-rata dari potongan-potongan tersebut dalam mode transmisi 5-15 watt. Bahkan jika kita mengasumsikan bahwa perangkat menghabiskan sebagian besar waktu dalam mimpi seperti kucing bangsawan, berdasarkan kecepatan transmisi dan perkiraan frekuensi sesi komunikasi, menjadi sangat jelas bahwa dengan daya tahan baterai yang wajar, sebagian besar perangkat ini akan menjadi baterai . Beberapa puluh kilogram lithium, yang sebagian besar tidak akan pernah diangkat oleh siapa pun dari bawah, karena akan dicuci dengan lumpur, akan tumbuh dengan kerang, akan membusuk, dan secara umum "tidak menguntungkan secara ekonomi."
Ingatlah bahwa hal seperti itu tidak bisa berfungsi sepanjang waktu, atau paling tidak sering, seperti sarang lebah atau router WiFi rumah, meskipun itu benar-benar tidak berdaya di bagian bawah dan tidak dijaga dengan cara apa pun.
Di sini saya harus memberikan beberapa contoh jaringan sensor tersebut. Nah, ini mereka:
Jadi, semua jaringan uji ini, dalam aksesibilitas "mendayung" dari pantai. Semua milik proyek Eropa
FP7-SUNRISE .
Di bawah ini adalah diagram dari situs web proyek yang menggambarkan lokasi dan fungsi berbagai laboratorium dan lokasi pengujian:

Seberapa sukses proyek ini sulit untuk dinilai.
Banyak artikel telah dirilis .
Total anggaran adalah
5 320 023 Euro . Di antara banyak perenungan adalah banyak universitas Eropa, pusat Belgia untuk sains dan teknologi NATO.
Status Proyek -
Ditutup pada 31 Desember 2016 .
Ada banyak jaringan uji kecil yang berbeda, yang sebagian besar merupakan peristiwa satu kali. Berikut adalah pasangan yang menarik perhatian saya:
Masalah utama, menurut saya, adalah bahwa untuk penggunaan nyata potongan-potongan seperti itu dengan muatan, Anda perlu membawa teknologi ke keadaan sedemikian rupa sehingga simpul jaringan siap untuk penerbangan ruang angkasa jarak jauh, tidak lebih dan tidak kurang - dibuang ke dalam air - dan secara mental mengucapkan selamat tinggal. Keributan yang rumit dengan baterai dan perawatan sama sekali menghilangkan gagasan tentang makna.
Hal lain adalah glider yang berbeda!
Kekuatan pendorong semua proyek tersebut diilustrasikan dalam satu gambar dari situs web robotika Liquid Boeing:
Video indah tentang apa itu Wave-glider dan bagaimana kerjanya:
Apa itu hanya peluncur dan bagaimana cara kerjanya:
Jika yang pertama memiliki platform permukaan, yang terlihat, maka yang kedua dapat menyelam selama berminggu-minggu dan berbulan-bulan
(lebih dari setahun!) Menyelam melintasi laut dan samudera, jarang, jarang berselancar di permukaan.
Konversi dan implementasi teknologi pertahanan belum dibatalkan, tentu saja, kita bisa berharap demikian. Bagaimanapun, Glider dan Wave-glider - ini berskala besar, serius dan untuk waktu yang lama.
Tapi intinya adalah ...... bahwa segala sesuatunya mengarah pada konfrontasi kendaraan otonom beraliran konveyor di satu sisi dan kapal selam nuklir di sisi lain, dengan satu-satunya perbedaan adalah bahwa dalam kasus yang terakhir, peluncuran masing-masing "pertama di antara yang sederajat" dirayakan sebagai hari libur umum. Yah, persetan dengan itu dengan sepotong besi, hanya di masing-masing dari mereka ada puluhan kapal selam yang sangat berkualitas hidup.
Jadi bagaimana dengan berjalan di bawah air dan tinju?
Sejalan dengan mengudara drone, kapal selam juga tidak menolak untuk memahami di mana mereka berada, itu juga akan baik untuk dapat tetap berhubungan dengan mereka, bahkan ketika semuanya terbenam.
Dalam beberapa tahun terakhir, hanya ada setumpuk publikasi tentang topik yang tepat membalas serangan cyber singkat tertentu pada jaringan sensor bawah air dan sistem penentuan posisi bawah air.
Berita gembira untuk penulis artikel tersebut adalah spoofing, bagaimana mendefinisikannya dan bagaimana menghadapinya.
Tampaknya masalah ini sangat sederhana - ambil saja model dari sistem navigasi satelit, ubah kecepatan cahaya menjadi kecepatan suara, dan di sini tampaknya menjadi bidang sains dan teknologi yang sama sekali baru.
Mari kita cari tahu asumsi apa yang menjadi dasar semua ini.
Dua jenis spoofer biasanya dibedakan - yang ada di permukaan air, dan yang ada di kolom air. Yang pertama menentukan koordinat mereka sendiri menggunakan GNSS, dan yang terakhir menggunakan sistem navigasi sonar, yang harus mereka hadapi.
Dalam publikasi, sebagai aturan, kita berbicara tentang semacam sistem navigasi hidro-akustik jangka panjang yang perlu dikompromikan. Tetapi saya menjanjikan mitos dan kenyataan, jadi kami akan menganalisis semua jenis utama sistem navigasi sonar dan bagaimana mereka dapat atau tidak dapat diatasi, bahkan yang jelas tidak cocok untuk penentuan posisi node jaringan bawah laut, baik ponsel maupun alat tulis. Kami membuat asumsi bahwa penyerang mengetahui semua modulasi dan algoritma demodulasi dari sinyal, semua penundaan dan pengaturan waktu sistem, frekuensi, penyandian dan detail terkecil.
Jadi
Sistem pengintai dan goniometer
Ini adalah mereka yang sudut dan jarak ke titik yang diinginkan diukur untuk menyelesaikan masalah navigasi.
Mungkin ada beberapa opsi untuk pengoperasian sistem seperti itu.
Dari sudut pandang lokasi antena pencari arah:
- Penerimaan di korban seluler
- Mentransmisikan pada suar drive stasioner. Antena dalam kasus ini harus berorientasi relatif terhadap titik-titik kardinal dengan cara yang diketahui oleh korban bergerak.
Dari sudut pandang metode penentuan jarak:
- Metode permintaan-respons
- Dengan pra-sinkronisasi, suar drive yang dipancarkan
- Mulai "permintaan-respons" untuk sinkronisasi, kemudian secara berkala memancarkan suar drive
Jika metode respons-permintaan digunakan, maka satu-satunya opsi untuk spoofing adalah lebih dekat dengan korban daripada drive beacon. Semuanya sangat sederhana di sini - sinyal navigasi rata-rata memiliki durasi yang nyata, dan yang tak kalah pentingnya, durasi yang dinyatakan dalam jarak (kali kecepatan suara).
Kita berbicara tentang puluhan dan ratusan milidetik, yaitu sekitar puluhan dan ratusan meter. Spoofer harus menerima sinyal permintaan suar dan memancarkan respons, mensimulasikan penundaan yang diperlukan untuk membentuk gambar korban dari spoofer seberapa jauh jaraknya dari suar drive.
Tidak
mungkin untuk mengubah sudut kedatangan sinyal, karena secara objektif dievaluasi oleh korban. Yang dapat dilakukan spuffer dalam situasi ini adalah mengubah sudut secara fisik - berada di sisi kanan korban.
Selain itu, spuffer tidak boleh membiarkan situasi di mana sinyal "palsu" tumpang tindih dengan sinyal nyata dari suar drive pada korban - dalam hal ini, dengan probabilitas yang sangat tinggi korban tidak akan menerima sinyal sama sekali.
Sementara skemanya ramping dan, secara teori, bahkan berbahaya. Mengapa itu benar-benar tidak bekerja - sedikit kemudian.
Jika metode pra-sinkronisasi digunakan, spoofer, di satu sisi, memiliki beberapa ruang untuk bertindak - tidak perlu lebih dekat dengan korban daripada drive beacon, Anda dapat dengan mudah masuk ke transmisi periodik antara sinyal suar.
Di sisi lain, ini lebih terhubung dengan periode emisi drive beacon - mungkin saja sinyal pengganti tidak sesuai dengan jarak antara yang asli.
Opsi dengan sinkronisasi primer dengan metode permintaan-respons dan transmisi beacon drive berikutnya, memberikan lebih banyak peluang bagi spoofer jika ia dapat melakukan substitusi pada saat sinkronisasi utama.
Opsi dengan antena array bertahap yang terpancar pada drive beacon bahkan lebih berbahaya bagi korban. Jika dalam kasus-kasus sebelumnya tidak mungkin untuk mengubah sudut kedatangan sinyal, maka dalam konfigurasi ini, dengan mengubah penundaan radiasi di antara berbagai elemen array antena bertahap, setiap sudut yang diinginkan dapat dibentuk dalam "kesadaran korban".
Semuanya terdengar cukup logis dan sangat mudah jatuh untuk umpan ini.
Tetapi pada kenyataannya, semua metode yang saya jelaskan di atas juga sama sekali tidak beroperasi. Ingatlah ini untuk saat ini.
Sistem pengintai
Di sini, dalam sebagian besar kasus, ada titik rujukan yang didistribusikan di sepanjang permukaan atau bawah, koordinat yang sudah diketahui korban sebelumnya atau mereka secara konstan ditransmisikan oleh titik rujukan ini. Sekali lagi, mungkin ada semua opsi sebelumnya untuk menentukan rentang - "permintaan-respons", pra-sinkronisasi, dll.
Semuanya di sini sangat mirip dengan sistem goniometer, dengan satu-satunya perbedaan adalah bahwa spoofer harus paling dekat dengan semua orang yang terlibat dalam proses poin kontrol. Dibutuhkan sinyal permintaan korban dengan cara yang sama, menggantikan, jika perlu, koordinat titik referensi saat ini (ingat, spuffer mengetahui semua skema modulasi-demodulasi dan format parsel!), Membentuk penundaan yang diperlukan sejauh mungkin. Jelas, dalam hal ini pembatasan serius diberlakukan pada lokasi spuffer - itu harus lebih dekat dari semua titik referensi, dan bahkan penundaan tidak bisa terlalu besar - ada bahaya tumpang tindih sinyal bertukar dan nyata pada korban.
Dan skema ini juga sulit digunakan.
Sistem Rangefinder Perbedaan
Hampir sepenuhnya mirip dengan yang sebelumnya - titik referensi terletak di permukaan air atau di bagian bawah, tetapi sekarang korban tidak memancarkan apa pun, tetapi hanya mendengarkan. Pengoperasian sistem tersebut sepenuhnya mengulangi ideologi GNSS - kedua satelit mentransmisikan lokasi mereka, dan titik referensi dalam sistem penentuan posisi hidroakustik mentransmisikan lokasi mereka menurut jam, disinkronkan dengan semua titik referensi lainnya.
Biasanya, karena alasan tertentu, sistem ini dianggap sebagai yang paling rentan terhadap serangan spoofing. Kemungkinan besar karena kerjanya didasarkan pada persamaan yang hampir sama dengan sistem GNSS.
Jadi, di sini semuanya terjadi sesuai dengan ide yang sama bahwa menjadi lebih dekat dengan korban daripada titik referensi nyata, spoofer mengirimkan sinyal pengganti sehingga datang kepada korban sebelum sinyal nyata. Karena Karena momen absolut radiasi tidak berperan, spoofer dapat mengirimkan sinyal lebih awal dari titik referensi. Satu-satunya perbedaan penting adalah waktu kedatangan sinyal kepada korban.
Kesimpulan
Ketiga kelas sistem pada pandangan pertama tampaknya rentan terhadap serangan spoofing, apa yang salah dengan argumen ini?
Faktanya, semuanya sangat sederhana: kecepatan rambatan sinyal yang terlihat rendah memainkan tipuan pada spoofer. Untuk mengganti sesuatu di sana, Anda perlu tahu dengan sangat akurat tidak hanya lokasi Anda dan lokasi titik kontrol atau suar drive, Anda perlu tahu lokasi korban!
Heck, untuk menyelesaikan masalah navigasi, Anda harus terlebih dahulu menyelesaikan masalah navigasi setidaknya tiga kali!
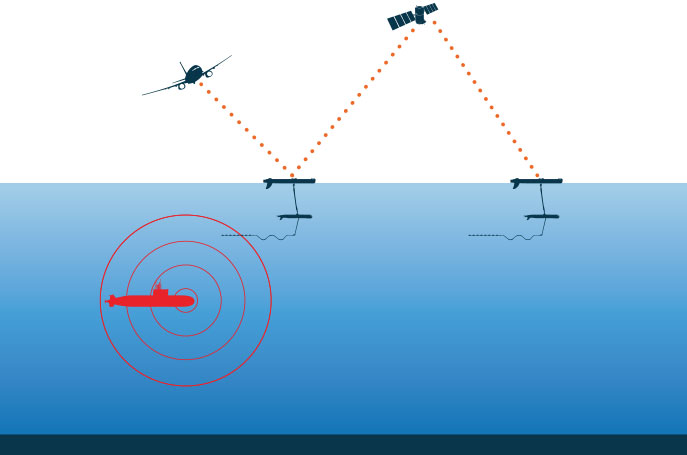
Spoofer udara ini tahu di mana "pembebas" terbang, dan dapat memberinya makan dengan data GNSS palsu. Di bawah air, ini hanya dapat dilakukan dalam garis pandang, yaitu beberapa meter, mungkin selusin dalam kasus yang paling optimis.
Tetapi apakah penulis publikasi ini benar-benar melewatkan detail yang begitu sederhana?
Tentu saja tidak. Saya pikir mereka mengerti semuanya dengan sempurna. Di bagian publikasi (terutama pada jaringan sensor bawah air), pertanyaan ini tidak diajukan sama sekali, di lain pihak, diusulkan untuk menentukan lokasi korban dalam artikel ... oleh sonar!
Dan dalam kasus spuffer di kolom air, yang dengan sendirinya tidak tahu di mana itu (sistem goniometer drive, misalnya, tidak akan membantunya dengan cara ini - itu adalah untuk dapat datang ke sana, dan tidak memahami posisi absolutnya).
Jika ini adalah spoofer permukaan, maka ia perlu menurunkan antena ke kedalaman yang cukup, jika ia ingin menentukan lokasi korban dengan sonar pasif atau aktif, maka orientasi sonar, tergantung pada kabel fleksibel untuk beberapa puluh meter, juga harus dapat melacak dengan akurasi yang tidak dapat dicapai.
Tak perlu dikatakan, keakuratan echolokasi horizontal pada prinsipnya tidak cukup untuk spoofing yang memadai (tidak berubah menjadi jamming!), Atau itu (seperti spoofing dalam dirinya sendiri!) Apakah cukup menarik di bawah air? Dan mungkin satu-satunya pilihan adalah ketika spuffer akan tahu persis lokasi korban - ketika dia akan secara fisik bersamanya, seperti ikan yang menempel dengan hiu paus.
Apa hasil yang paling mungkin, mengingat apa yang saya tulis tentang jangkauan komunikasi dan semua kondisi operasi dari node dan glider jaringan kapal selam?
- Jika ini dekat (ratusan meter - unit kilometer), maka mereka hanya akan berenang ke orang yang meletakkan spoofer di atas kapal dan meminta penjelasan
- Jika ini jauh (puluhan kilometer), maka klik yang tidak sah (dan tidak berarti!) Dari sonar dapat dengan mudah menanggapi "frekuensi 533".
Memancarkan secara aktif di bawah air - seperti mengemudi di malam hari di dalam mobil dengan lampu interior dinyalakan - setidaknya secara sembrono.Saya bahkan tidak mengatakan bahwa hidroakustik masih akustik, sinyalnya tidak memerlukan peralatan perekaman yang canggih, semuanya terlihat pada spektrum, dan jika dirancang untuk jarak jauh dan pada frekuensi rendah, itu hanya terdengar.Oleh karena itu, ternyata tinju, efektif di udara - spoofing GNSS, ternyata agak canggung dan tidak berarti dalam lingkungan akuatik.Segala sesuatu yang benar-benar bekerja melawan akustik - kemacetan, kemacetan dan sekali lagi kemacetan, semakin kuat - semakin besar peluang. Baik, atau hanya berenang dan mengambilnya dengan ottertkoy =)PS
Saya sengaja tidak memberikan tautan ke publikasi, mereka yang tertarik dapat dengan mudah menemukan artikel tentang kata-kata "spoofing akustik bawah air".Secara tradisional, saya akan berterima kasih atas kritik yang membangun, pesan kesalahan, saran dan saran!