Kembali pada 1495, Leonardo da Vinci menciptakan gambar baju besi hidup. Dan hanya setelah 425 tahun, penulis fiksi ilmiah Ceko Karel Čapek pertama kali menggunakan kata "robot" dalam permainannya "RUR". Robot modern jauh lebih pintar, lebih kompleks dan lebih mobile daripada robot da Vinci, tetapi mereka memiliki fitur umum. Salah satunya adalah bahan dari mana mesin-mesin luar biasa ini dibuat. Ketika kita berbicara tentang robot, kita paling sering membayangkan sesuatu yang sintetik, bukan tanpa alasan dalam buku dan film robot yang kadang-kadang disebut sintetis.
Namun, robot dapat dibuat tidak hanya dari logam, plastik atau serat karbon. Ilmuwan dari Universitas Vermont (AS) memutuskan untuk menggunakan kandang katak sebagai bahan bangunan. Robot mikroskopis yang dihasilkan, yang disebut "xenobots," mampu melakukan perjalanan melalui tubuh organisme hidup dan melakukan tugas mereka. Bagaimana tepatnya para ilmuwan menciptakan kehidupan buatan, bakat apa yang bisa dibanggakan oleh xenobot, dan di mana penemuan yang tidak biasa itu diterapkan? Kami belajar tentang ini dari laporan kelompok penelitian. Ayo pergi.
Dasar studi
Menciptakan mekanisme yang akan melakukan beberapa tugas di bawah kendali kecerdasan buatan tidak begitu sulit saat ini. Tidak sulit untuk membangun kembali organisme yang ada dengan mengubah struktur, fungsi atau karakteristiknya. Namun, menciptakan kehidupan dari awal bukanlah tugas yang mudah. Para peneliti di University of Vermont mengatakan bahwa sebagian besar bahan sintetis digunakan dalam robotika karena kesederhanaan pembuatan, implementasi, dan integrasi mereka. Kata logam yang dilebih-lebihkan selalu bisa dilebur, disemak, atau diasah. Tetapi organisme hidup, jaringan dan sel, yaitu sistem kehidupan menunjukkan stabilitas struktur dan fungsi. Mereka sangat tahan terhadap gangguan luar yang bertujuan mengubah perilaku mereka.
Pada saat yang sama, sel-sel hidup, terutama yang embrio, menunjukkan fitur luar biasa yang bahkan robot sintetik paling maju pun tidak bisa sesumbar. Sel-sel embrionik mampu mengatur diri sendiri, menyadari proses perkembangan dan regenerasi jaringan, tergantung pada situasinya. Manipulasi dengan kemampuan ini memungkinkan penciptaan morfologi sintetis yang melaluinya bentuk-bentuk kehidupan baru dapat terwujud, tidak peduli seberapa keras kedengarannya. Selain itu, proses swasusun sel dapat diawasi, sehingga memberikan struktur dan karakteristik yang diperlukan di masa depan.
Saat ini, sudah ada beberapa metode untuk mengembangkan dan menciptakan sistem kehidupan individu. Sebagai contoh, organisme uniseluler dapat dimodifikasi dengan cara genom refaktor (ditransformasikan), tetapi ini belum memungkinkan untuk diterapkan dalam sistem multiseluler.
Anda juga dapat memodifikasi untai sel dengan mengubah kondisi kultur. Tetapi dalam kasus ini, kontrol atas proses dan atas struktur dan fungsi akan minimal. Sebaliknya, ada perkembangan di bidang bioengineering, di mana kerangka kerja tiga dimensi dipelajari. Opsi ini akan memberi lebih banyak kontrol. Tetapi ketidakmampuan untuk memprediksi perilaku struktur biologis yang sewenang-wenang membatasi teknik ini pada perakitan mesin biologis berdasarkan yang sudah ada. Dengan kata lain, itu akan menjadi modifikasi yang sama dari apa yang sudah ada di sana, tetapi bukan penciptaan organisme hidup baru.
Terlepas dari semua kesulitan dan hambatan, ada banyak cara. Salah satunya adalah pencarian komputasi dalam hubungannya dengan pencetakan tiga dimensi. Tidak seperti pembelajaran mesin, pencarian adalah proses evolusi yang memungkinkan Anda mendesain struktur fisik mesin dan perilakunya dari awal. Selain itu, metode ini tidak terikat pada jenis struktur spesifik apa pun yang sedang dibuat atau ke fungsi spesifik apa pun. Algoritma evolusi yang sama dapat digunakan untuk mengembangkan sistem yang berbeda: obat-obatan, bahan metamorfosis, dan bahkan mesin otonom.
Dalam penelitian kami hari ini, para ilmuwan mendemonstrasikan pendekatan terukur terhadap desain sistem kehidupan menggunakan algoritma evolusi.
 Gambar No. 1
Gambar No. 1Metode baru diatur sebagai konveyor linier, yang mengambil sebagai masukan deskripsi blok bangunan biologis yang digunakan dan perilaku yang diinginkan yang harus ditunjukkan oleh sistem manufaktur. Konveyor terus menampilkan sistem kehidupan yang sehat yang menerapkan perilaku yang ditentukan dengan cara yang berbeda. Sistem kehidupan yang dihasilkan adalah kumpulan baru sel yang sangat sedikit hubungannya dengan organ atau organisme yang ada.
Hasil penelitian
Konveyor diatur sebagai urutan generator dan filter. Generator pertama adalah algoritma evolusi yang menemukan berbagai cara menggabungkan blok bangunan biologis untuk mewujudkan perilaku yang diinginkan. Untuk mulai dengan, populasi varian acak dari model sistem masa depan dibuat. Setiap model kemudian diciptakan kembali dalam lingkungan virtual, setelah itu peringkat kinerja secara otomatis ditetapkan. Model yang kurang produktif dihapus dan ditimpa oleh salinan modifikasi dari model yang lebih produktif. Pengulangan proses ini mengarah pada pembentukan populasi yang beragam dan pola yang tidak berulang.
Proses desain presentasi video dari organisme yang dapat dikonfigurasi ulang.Karena kemungkinan ada banyak perbedaan antara media fisik yang disimulasikan dan target, model yang efektif dilewatkan melalui filter stabilitas (keandalan) yang memungkinkan hanya mereka yang mendukung perilaku yang diinginkan meskipun kebisingan (perubahan dalam lingkungan) melewatinya.
Model yang tahan terhadap kebisingan kemudian dilewatkan melalui filter rakitan, yang menghilangkan model yang tidak cocok untuk metode perakitan saat ini atau tidak dapat menskalakan ke tugas yang lebih kompleks di masa mendatang. Kemampuan memproduksi bergantung pada ukuran konkavitas minimum, yang akan dipertahankan dalam kelompok sel punca yang berkembang, yang cenderung menutup celah kecil dalam geometri umumnya. Skalabilitas model tergantung pada bagiannya dari jaringan pasif, yang menyediakan ruang untuk sistem organ masa depan atau muatan (yaitu, ruang untuk memegang zat yang bisa diangkut, seperti obat-obatan).
 Xenopus laevis
Xenopus laevisModel yang berhasil melewati filter rakitan kemudian dibentuk dari jaringan hidup.
Sel induk
pluripotent * pertama kali dipanen dari embrio
Xenopus laevis (katak pacu halus) pada tahap blastula, kemudian dipisahkan dan digabungkan untuk mencapai jumlah sel yang diinginkan.
Sel-sel pluripotent * mampu membedakan (mentransformasikan) menjadi semua jenis sel, kecuali sel-sel organ kuman ekstra.
Setelah masa inkubasi, jaringan agregat dibentuk secara manual dengan pengurangan menggunakan kombinasi forsep untuk bedah mikro dan elektroda kauterisasi dengan jarum 13 μm.
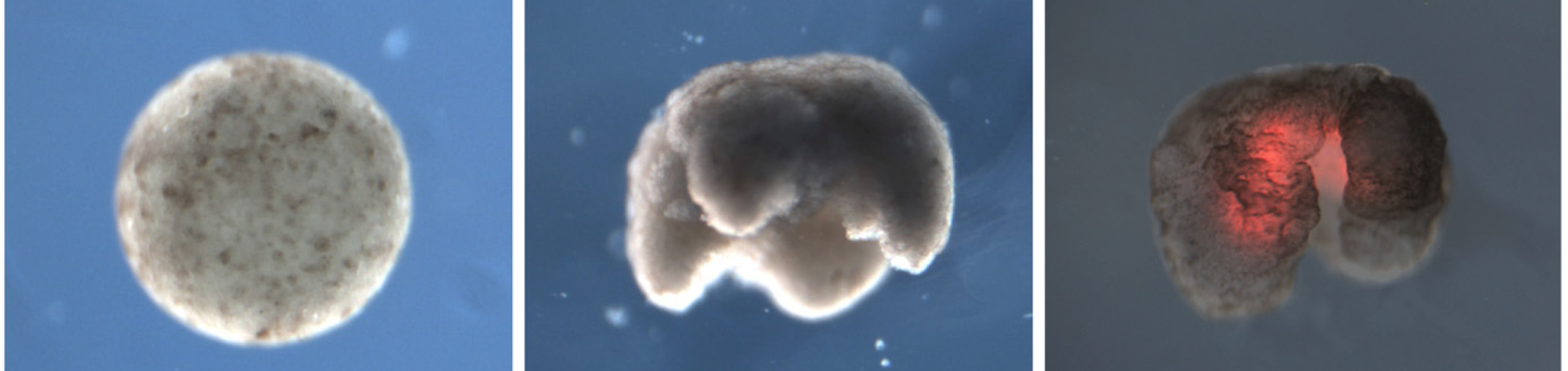
Selain itu, jaringan kontraktil dilapisi pada tubuh dengan memperkenalkan sel-sel progenitor jantung katak, yang secara alami berkembang menjadi kardiomiosit (otot jantung). Sel-sel ini akan menciptakan gelombang kontraktil di tempat-tempat tertentu dari organisme yang dibuat.
Hasil dari semua manipulasi ini adalah representasi langsung tiga dimensi dari model, yang memiliki kemampuan untuk bergerak secara independen melalui lingkungan air selama beberapa hari dan bahkan berminggu-minggu tanpa nutrisi tambahan.
Presentasi video adalah proses menciptakan organisme yang dapat dikonfigurasi ulang.Organisme yang dihasilkan kemudian dimasukkan ke dalam lingkungan fisik nyata untuk memantau perilaku mereka.
Selanjutnya, para ilmuwan membandingkan pengamatan dengan hasil pemodelan untuk mengidentifikasi fakta transisi perilaku dari "sintetis" menjadi "organik".
Aspek penting dari teknik ini adalah kelanjutan dari algoritma evolusi bahkan setelah pengenalan organisme siap pakai ke lingkungan. Beberapa dari mereka, meskipun memiliki kegunaan pada tahap pengembangan, mungkin tidak menampilkan perilaku yang diharapkan. Model organisme seperti itu dikeluarkan dari algoritme, yang mengarah pada penciptaan organisme yang lebih stabil dan ramah lingkungan di waktu berikutnya.
Dengan demikian, 4 berjalan conveyor dilakukan. Hasil dari ini adalah 4 jenis organisme, menunjukkan fitur berikut: penggerak, manipulasi objek, transfer objek dan perilaku kolektif. Sekarang mari kita bicara lebih banyak tentang masing-masing fitur.
 Gambar No. 2
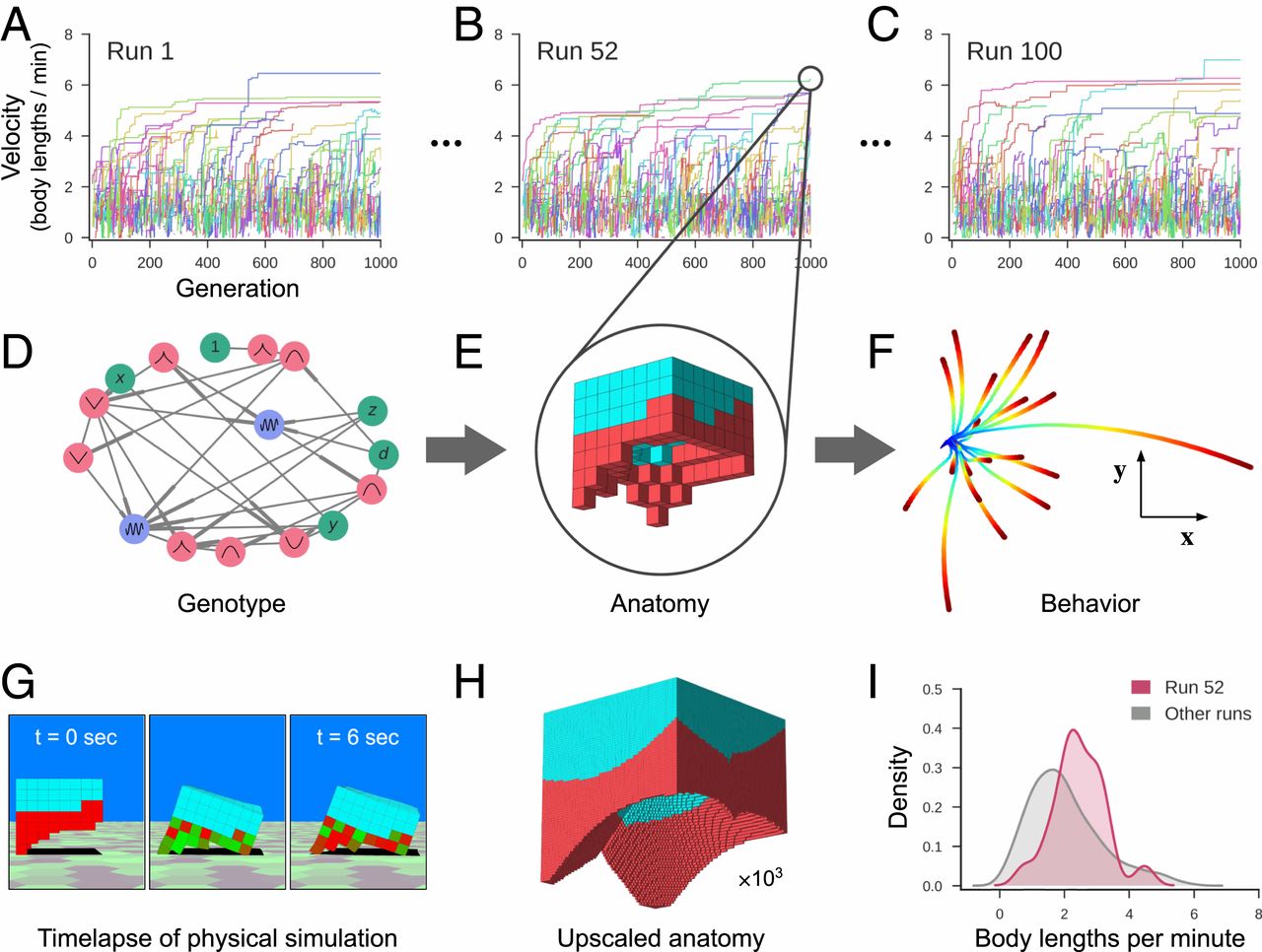
Gambar No. 2Untuk mendapatkan serangkaian model yang beragam, dilakukan 100 pengujian independen terhadap algoritma evolusioner (
2A -
2C ), yang masing-masing dimulai dengan serangkaian model acak awal yang berbeda. Selama setiap pengujian, model dipilih berdasarkan perpindahan bersih (perpindahan) yang dicapai selama periode 10 detik (dengan kontraksi fase-modulasi yang dimodulasi secara acak, siklus pada 2 Hz). Dalam perjalanan setiap tes, parameter seleksi tambahan diterapkan dalam bentuk merangsang kompetisi di dalam dan di antara garis genetik yang unik, yang mengarah pada pembentukan dinamika lingkungan yang unik. Pada akhir setiap pengujian, model yang paling cocok dihilangkan (
1A ) dan melewati filter stabilitas dan rakitan. Dalam proses penyaringan ini, model-model tersebut dipilih yang mempertahankan penggerak cepat selama penskalaan dan pembangunan (gambar No. 3).
 Gambar No. 3
Gambar No. 3Perlu dicatat bahwa silia (silia, rambut tipis pada permukaan sel) tidak dimodelkan selama proses desain dan ditekan selama tes praktis dengan mikroinjeksi embrionik mRNA yang menyalin domain intraseluler Notch. Dengan demikian, semua gerakan organisme dilakukan secara eksklusif melalui pengurangan jaringan otot jantung.
Lintasan organisme yang disimulasikan dan direalisasikan yang didekilasi (tanpa silia) dibandingkan dalam dua orientasi: vertikal dan terbalik, mis. terbalik 180 ° relatif terhadap bidang melintang. Pengamatan menunjukkan bahwa setidaknya satu dari varian model tubuh berhasil menyadari perilaku yang diberikan dalam orientasi vertikal, tetapi tidak dalam yang terbalik (gambar No. 4).
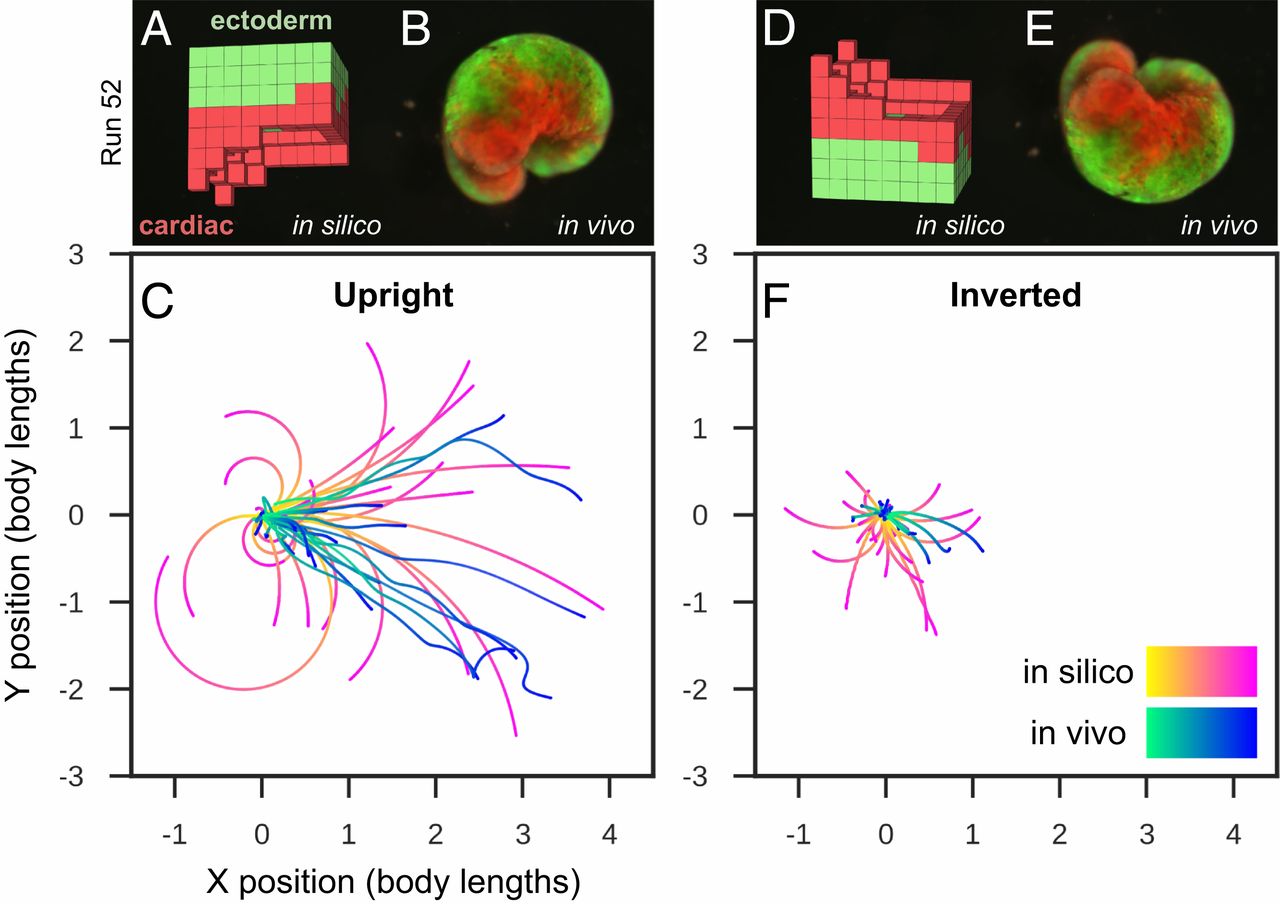 Gambar No. 4
Gambar No. 4Arah pergerakan organisme dengan orientasi vertikal bertepatan dengan arah model di bawah gangguan acak. Ini menunjukkan bahwa gerakan yang sukses di ruang angkasa tidak acak, tetapi merupakan hasil dari desain model organisme itu sendiri.
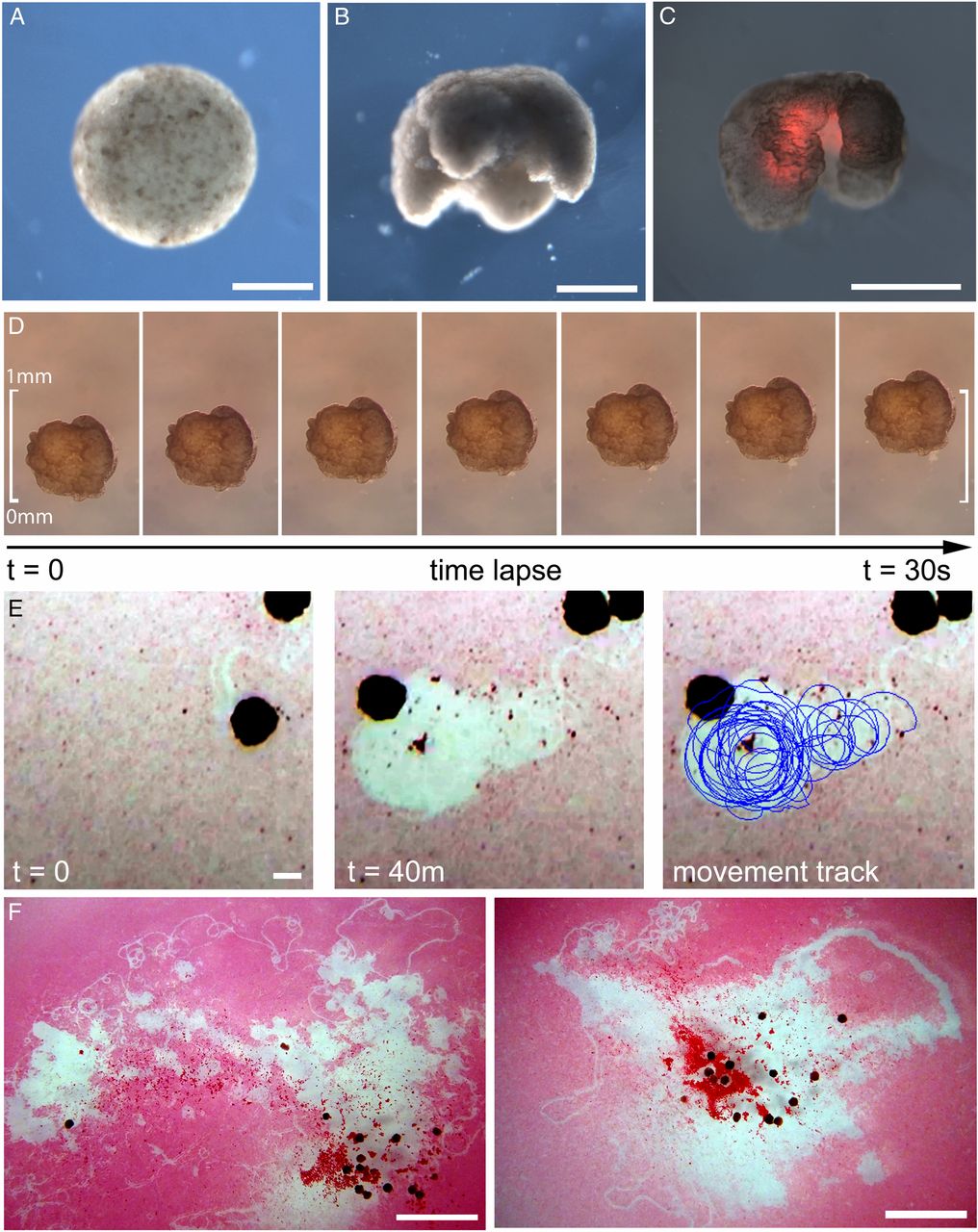
Fitur kedua adalah manipulasi objek. Ketika ada partikel padat di lingkungan organisme uji, yang pertama mulai bergabung secara spontan dengan mereka, baik dalam pemodelan dan dalam praktik (
3F ).
Perilaku ini sulit disebut terstruktur, karena parameter tugas yang diperlukan tidak ditetapkan. Ini dapat direalisasikan secara lebih akurat dengan menambahkan data yang lebih tepat: misalnya, menunjukkan area yang perlu dibersihkan dari partikel atau menunjukkan jenis partikel tertentu yang perlu dihilangkan, sementara mengabaikan yang lainnya. Perilaku kedua diimplementasikan, tetapi sejauh ini pada tingkat primitif.
Pada tahap berikutnya, organisme yang menunjukkan kemampuan untuk mengangkut benda diuji. Beberapa organisme telah dirancang untuk mengurangi hambatan hidrodinamik melalui lubang di tengah bidang melintang mereka. Namun, tidak ada jaringan kontraktil di area tubuh ini.
Lubang ini selama siklus berikutnya dari algoritma evolusi dapat ditransformasikan menjadi semacam kantong untuk mentransfer objek, yang dapat digunakan untuk pengiriman obat terlokalisir.
Fitur lain adalah perilaku kolektif. Selama implementasi praktis, tabrakan dua organisme diamati, yang mengarah pada pembentukan koneksi mekanis sementara. Dua organisme ini mulai berputar satu sama lain, dan setelah beberapa revolusi lagi terpisah di sepanjang lintasan tangensial. Perilaku seperti itu akan jauh lebih jelas jika Anda tidak menekan perkembangan silia, karena mereka mengarah ke "keterikatan" dari dua organisme satu sama lain, yaitu. koneksi mereka menjadi lebih lama.
Untuk seorang kenalan yang lebih mendetail dengan nuansa penelitian ini, saya sarankan Anda melihat
laporan para ilmuwan dan
bahan tambahan untuk itu.
Epilog
Studi ini tidak sulit disebut unik, mengingat hasilnya. Para ilmuwan mengambil sel katak dan menciptakan darinya organisme multisel baru yang melakukan fungsi tertentu dalam berbagai tingkat keberhasilan. Bahkan para penulis karya ini memahami bahwa banyak yang ketakutan dengan prospek robot yang otonom, agak berpikir, apalagi bentuk-bentuk kehidupan baru. Namun, menurut mereka, penelitian ini memungkinkan pemahaman yang lebih baik tentang kehidupan itu sendiri sebagai sebuah fenomena. Selain itu, xenobot yang dikembangkan dapat berfungsi dalam kedokteran, menjadi ahli bedah nano yang hidup, menghilangkan sel-sel berbahaya dan patogen dari tubuh pasien, atau kurir nano obat, mengantarkannya langsung ke tempat mereka paling efektif memerangi penyakit.
Kehidupan dalam segala bentuk dan manifestasinya tidak tercela, terlepas dari segala kekurangannya. Setiap makhluk hidup telah berevolusi untuk beradaptasi dengan perubahan kondisi kehidupan. Ilmu pengetahuan modern mampu menciptakan kehidupan, tetapi hanya dalam kerangka mengubah organisme yang ada. Tetapi untuk menciptakan sesuatu yang baru dari awal adalah tugas yang sama sekali berbeda, lebih sulit, lebih ambisius. Ada beberapa contoh organisme yang diciptakan secara artifisial, tetapi mereka tidak dapat dibandingkan dengan yang dijelaskan oleh penulis fiksi ilmiah. Meskipun demikian, para ilmuwan dari seluruh dunia tidak menghentikan penelitian mereka, berharap untuk menciptakan bentuk kehidupan baru. Masih sulit untuk mengatakan betapa berbahayanya bermain dengan alam. Namun, menurut penulis fiksi ilmiah, penemuan seperti itu tidak akan membawa kebaikan. Namun demikian, karya sastra fiksi ilmiah, meskipun dalam banyak hal memprediksi masa depan masyarakat secara umum dan sains pada khususnya, hanya isapan jempol dari imajinasi penulis. Bagaimana tepatnya teknologi yang sedang dikembangkan, termasuk xenobot, akan digunakan, tergantung sepenuhnya pada diri kita sendiri.
Terima kasih atas perhatian Anda, tetap penasaran dan selamat berakhir pekan, semuanya! :)
Sedikit iklan :)
Terima kasih telah tinggal bersama kami. Apakah Anda suka artikel kami? Ingin melihat materi yang lebih menarik? Dukung kami dengan melakukan pemesanan atau merekomendasikan kepada teman Anda
VPS berbasis cloud untuk pengembang mulai $ 4,99 ,
analog unik dari server entry-level yang diciptakan oleh kami untuk Anda: Seluruh kebenaran tentang VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps mulai dari $ 19 atau cara membagi server? (opsi tersedia dengan RAID1 dan RAID10, hingga 24 core dan hingga 40GB DDR4).
Dell R730xd 2 kali lebih murah di pusat data Equinix Tier IV di Amsterdam? Hanya kami yang memiliki
2 x Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 TV dari $ 199 di Belanda! Dell R420 - 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB - mulai dari $ 99! Baca tentang
Cara Membangun Infrastruktur Bldg. kelas menggunakan server Dell R730xd E5-2650 v4 seharga 9.000 euro untuk satu sen?