Untuk mendapatkan data pelatihan yang cukup untuk robot mobil, Anda tidak perlu menggunakan kerumunan orang yang menandai video secara manual

Setelah membaca buku tentang topik tertentu, Anda tidak akan menjadi ahli di dalamnya. Bagaimana bisa kamu tidak menjadi dia dengan membaca banyak tentang buku yang sama. Untuk menjadi seorang profesional sejati dalam bidang pengetahuan apa pun, perlu untuk mengumpulkan sejumlah besar informasi dari berbagai sumber.
Hal yang sama akan berlaku untuk robomobiles dan teknologi lainnya berdasarkan AI.
Jaringan saraf yang mendalam yang bertanggung jawab untuk pengoperasian robomobile membutuhkan pelatihan komprehensif. Mereka perlu mempelajari kedua situasi yang mungkin mereka hadapi dalam kondisi sehari-hari, dan kasus-kasus tidak biasa yang tidak akan mereka hadapi jika beruntung. Kunci keberhasilan adalah memastikan bahwa mereka dilatih tentang data yang benar.
Tapi apa data yang cocok? Ini adalah situasi baru atau tidak pasti, dan bukan pengulangan yang sama terus-menerus.
Pembelajaran aktif adalah metode pemilihan data pembelajaran untuk pembelajaran mesin yang secara otomatis menemukan data yang beragam ini. Selain itu, ia mengumpulkan set data untuk sebagian kecil dari waktu yang dibutuhkan orang untuk menyelesaikan tugas ini.
Ini bekerja dengan bantuan model yang terlatih, yang beralih pada data yang dikumpulkan dan menandai bingkai itu, dengan pengakuan yang mengalami kesulitan. Kemudian bingkai ini ditandai oleh orang-orang. Kemudian mereka ditambahkan ke data pelatihan. Ini meningkatkan akurasi model dalam situasi seperti pengenalan objek dalam kondisi sulit.
Cara mencari jarum di tumpukan data
Jumlah data yang diperlukan untuk melatih robomobile sangat besar. Para ahli dari
RAND Corporation percaya bahwa mobil perlu menempuh jarak 17 miliar km untuk melampaui akurasi orang tersebut sebesar 20%. Untuk melakukan ini, armada 100 mobil di dunia nyata harus mengemudi terus menerus selama 500 tahun.
Selain itu, tidak semua data yang diperoleh saat mengemudi di jalan cocok untuk tugas ini. Data pelatihan yang efektif harus berisi kondisi yang beragam dan kompleks untuk menjamin perjalanan yang aman.
Jika orang terlibat dalam mencari dan menandai data ini, maka memproses data yang diterima oleh armada 100 mobil yang melakukan perjalanan 8 jam sehari akan membutuhkan pekerjaan lebih dari satu juta spidol, yang perlu menandai data dari semua kamera dari semua mobil - jelas tugas yang mustahil. Terlepas dari biaya tenaga manusia, mengalokasikan sumber daya untuk penyimpanan data dan komputasi jaringan saraf tidak praktis.
Kombinasi markup dan persetujuan data merupakan tantangan serius bagi pengembangan robomobiles. Dengan menerapkan AI pada proses ini, Anda dapat menghemat waktu dan uang untuk pelatihan, sekaligus meningkatkan akurasi jaringan saraf.
Mengapa belajar aktif?
Ada tiga metode umum untuk memilih data untuk pelatihan jaringan saraf robomobiles. Pengambilan sampel secara acak memilih frame dari database secara berkala, yang menggambarkan skenario yang paling umum, tetapi kemungkinan akan melewatkan kasus yang jarang terjadi.
Pengambilan sampel berbasis metadata menggunakan label dasar (misalnya, "hujan", "malam") untuk mengambil sampel data, membuatnya lebih mudah untuk menemukan situasi umum yang sulit, tetapi juga kehilangan bingkai unik yang tidak dapat dengan mudah diklasifikasikan - seperti trailer dengan traktor atau orang dengan jumper. menyeberang jalan.
 Perbandingan pemandangan yang biasa di jalan raya (kiri atas) dengan skenario yang tidak biasa: pengendara sepeda malam di roda belakang, truk pickup dengan trailer dengan trailer, pejalan kaki di jumper.
Perbandingan pemandangan yang biasa di jalan raya (kiri atas) dengan skenario yang tidak biasa: pengendara sepeda malam di roda belakang, truk pickup dengan trailer dengan trailer, pejalan kaki di jumper.Terakhir, pengambilan sampel secara manual menggunakan tag metadata bersama dengan orang-orang yang melihat bingkai - tugas semacam itu memakan waktu, rentan kesalahan dan tidak skala dengan baik.
Pembelajaran aktif memungkinkan untuk mengotomatiskan proses memilih frame, sambil memilih titik referensi yang berharga dalam data. Ini dimulai dengan pelatihan jaringan saraf khusus pada data yang sudah diberi label. Setelah itu, jaringan memproses data yang tidak terisi, memilih bingkai yang tidak dapat dikenali - dengan demikian, ia mencari data yang akan sulit untuk algoritma robot mobil. Kemudian data ini dipelajari dan diberi label oleh orang-orang, dan ditambahkan ke basis data pelatihan.
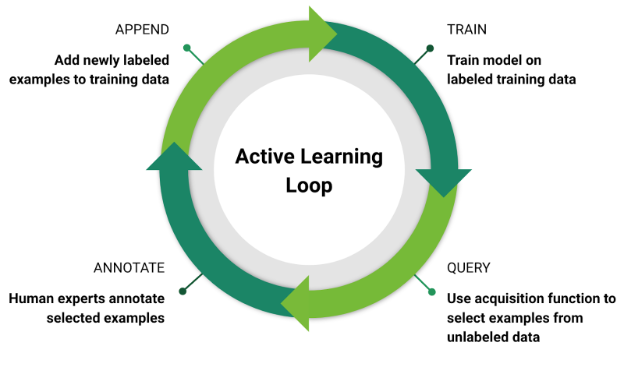 Loop pembelajaran aktif: untuk melatih model tentang data berlabel, membuat pilihan data yang tidak terisi, menandai data yang dipilih menggunakan tenaga manusia, menambahkan data berlabel baru ke dalam basis data; ulangi.
Loop pembelajaran aktif: untuk melatih model tentang data berlabel, membuat pilihan data yang tidak terisi, menandai data yang dipilih menggunakan tenaga manusia, menambahkan data berlabel baru ke dalam basis data; ulangi.Pelatihan aktif telah menunjukkan kemampuannya untuk meningkatkan akurasi operasi jaringan saraf robomobiles dibandingkan dengan penambahan data manual. Dalam
penelitian kami
, kami menemukan bahwa peningkatan akurasi ketika menggunakan pelatihan aktif melebihi peningkatan akurasi dengan pengambilan sampel data manual hingga 3 kali untuk pengakuan pejalan kaki, dan hingga 4,4 kali untuk pengendara sepeda.
Pada saat yang sama, metode pelatihan lanjutan untuk jaringan saraf, misalnya, pembelajaran aktif, pembelajaran
transfer , dan
pembelajaran kolaboratif bekerja paling efisien pada infrastruktur yang andal dan terukur yang memungkinkan Anda untuk secara bersamaan memproses data dalam jumlah besar, memperpendek siklus pengembangan. Akses ke kapasitas tersebut disediakan oleh proyek
NVIDIA GPU Cloud , di mana ada alat pelatihan yang disebutkan dan perpustakaan besar jaringan saraf yang dalam untuk robot mobil.