Latar belakang
Musim panas yang panas telah berakhir, di belakang ada liburan keluarga yang indah di laut yang hangat dan lembut, garis-garis hari kerja kelabu sudah terlihat di depan. Agar tidak menyerah pada depresi musim gugur, sangat penting untuk melakukan sesuatu yang menyenangkan dan bermanfaat, dan ini tidak butuh waktu lama: putra tertua harus menyiapkan pekerjaan untuk konferensi sekolah. Topik pekerjaan sudah menggantung di udara untuk waktu yang lama. Saya mengikuti dengan penuh minat publikasi oleh penulis Neoprog "Pengembangan hexapod dari awal". Dan itu adalah artikelnya yang menginspirasi kami untuk bekerja ke arah ini.
Konstruksi
Sebagai elemen penggerak struktural, kami memilih servos MG-996R. Dari karakteristik yang diklaim, mereka memiliki karakteristik yang cukup tinggi dan daya dengan biaya yang relatif rendah. Dimensi dan desain drive servo ini membentuk dasar untuk desain lebih lanjut dari robot, yang awalnya kami rencanakan untuk dibuat dari plastik menggunakan pencetakan 3D.
Langkah pertama adalah membuat dan menguji prototipe yang berfungsi dari satu anggota tubuh.

Karena tidak memiliki pengalaman dalam program pemodelan 3D, kami memutuskan untuk menerjemahkan sketsa kertas kami menjadi model tiga dimensi menggunakan editor pembangun 3D yang dibangun dalam Windows 10. Untuk semua kesederhanaannya, editor ini memiliki persenjataan yang cukup luas dan memungkinkan Anda untuk membuat model 3D yang cukup kompleks.
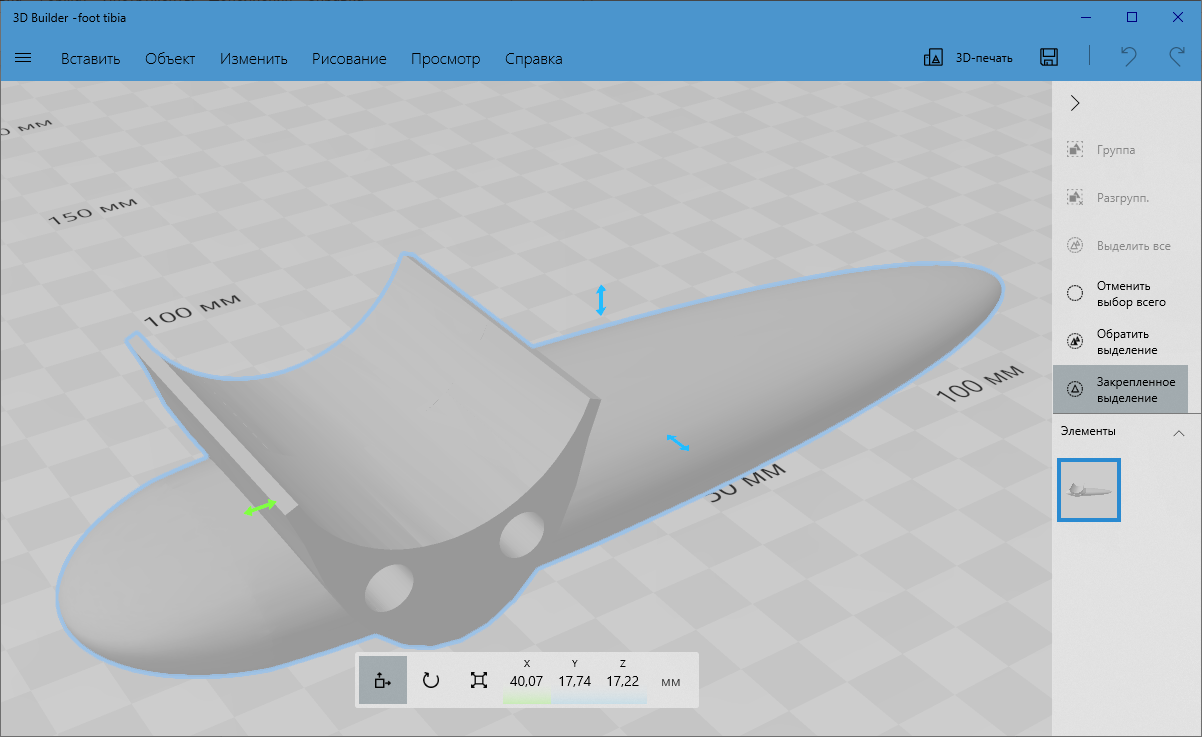
Tetapi kesederhanaan bekerja di editor ini juga merupakan titik lemahnya. Kurangnya kontrol atas jumlah simpul dalam model mengarah pada fakta bahwa setelah merobek-robek dan mengelem berulang kali, model yang tampak sederhana mulai memiliki
dunia batin yang besar dengan jumlah poligon dan editor mulai melakukan semacam perhitungan ulang internal model, yang memungkinkan Anda hanya merenungkan kreasi Anda tanpa kemampuan untuk mengedit sesuatu.
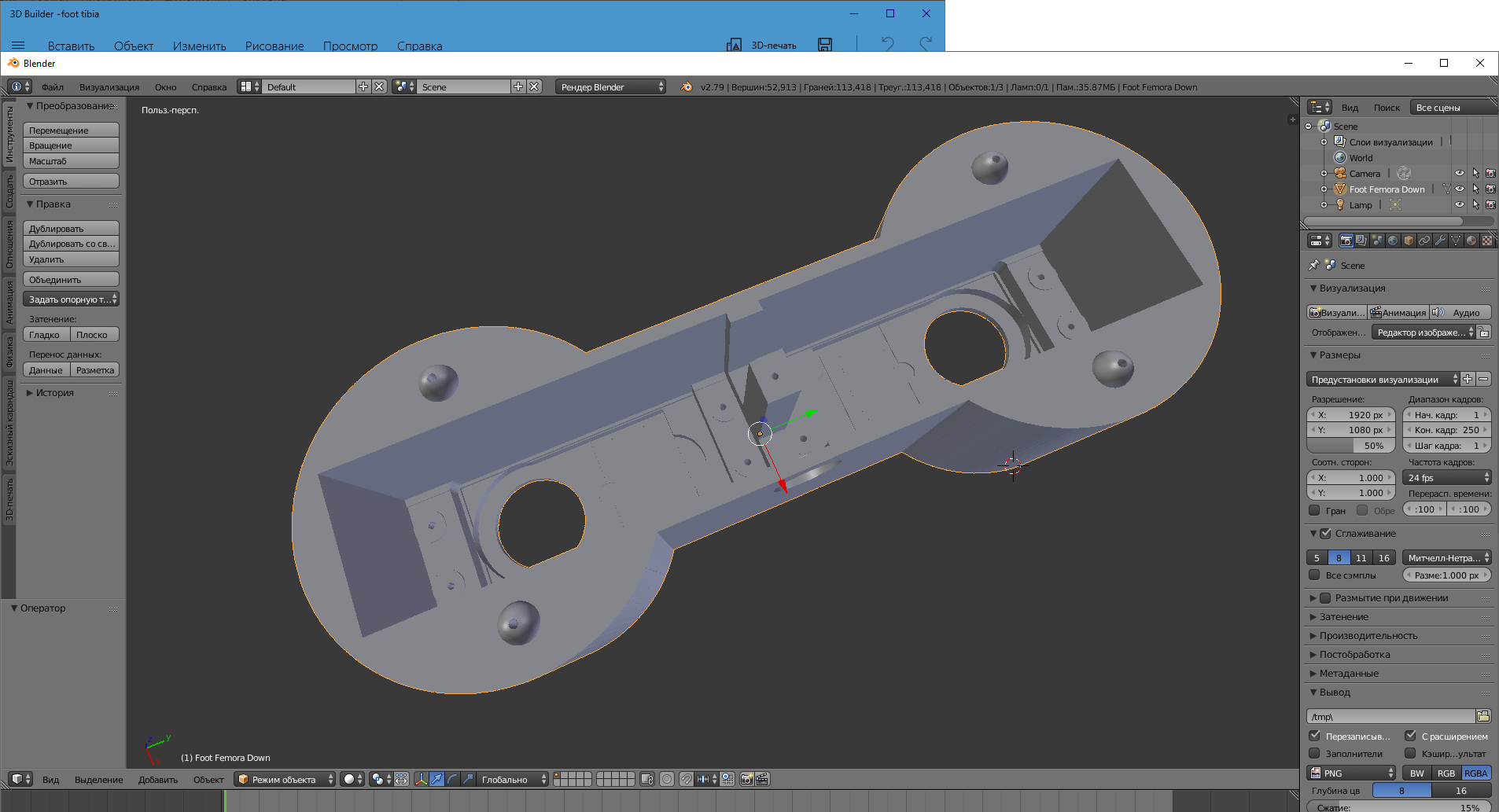
Setelah analisis cepat dari editor yang tersedia, sudah biasa untuk menggunakan Blender karena gratis
dan tidak dapat dimengerti dan fakta bahwa saya berusaha untuk mempelajarinya beberapa kali dan semua upaya berakhir dengan kegagalan. Kali ini, kehadiran tujuan tertentu telah membuahkan hasil. Keterampilan minimum, tetapi cukup dalam editor ditundukkan dan kami melanjutkan pengembangan. Saya ingin mencatat bahwa di masa depan kami tidak sepenuhnya menolak untuk bekerja di pembuat 3D. Masih jauh lebih nyaman untuk melakukan beberapa tindakan finishing dengan model di dalamnya: membuat lubang sekrup, memotong rongga internal dengan bentuk kompleks, dan banyak lagi.
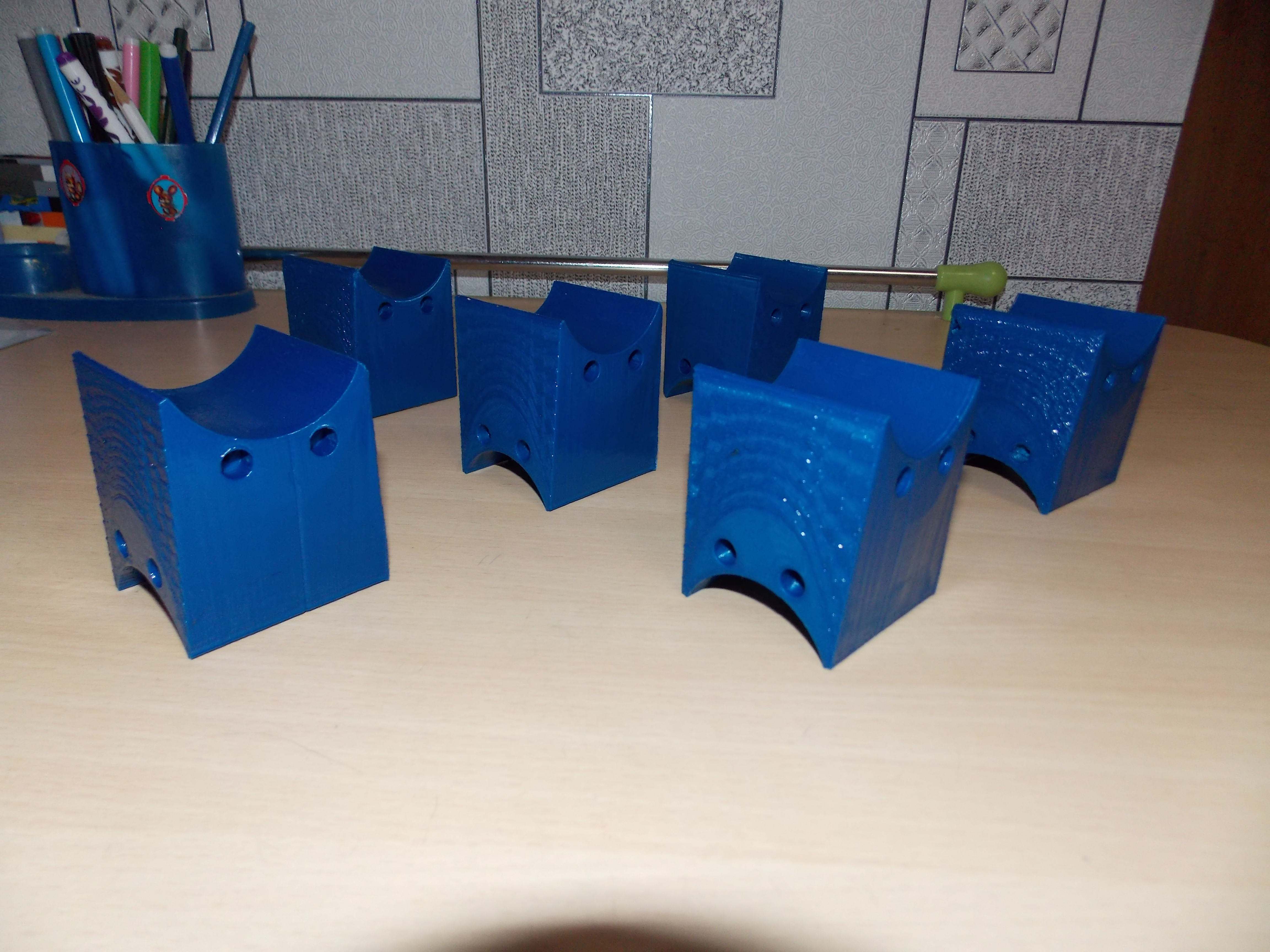
Saat mendesain anggota badan, kami mengatur tugas untuk menyembunyikan servos di dalam selungkup secara maksimal. Secara umum, ini mungkin, tetapi semua sama, loop harus dibiarkan di luar untuk mengurangi dampak mekanis ketika sambungan ditekuk. Dengan desainnya memungkinkan Anda untuk mempertahankan kebebasan bergerak dari sendi di kisaran maksimum 0 - 180 derajat. Untuk mengurangi gesekan dan keausan, bantalan disediakan di setiap sambungan.

Untuk mencetak, kami menggunakan Printer 3D Infintary, yang dibeli di "bawah langit" beberapa tahun yang lalu. Prosesnya agak santai, jadi butuh lebih dari satu hari untuk mencetak seluruh anggota badan.

Selama waktu ini, kami membuat sketsa dan membangun model 3D dari bingkai di mana anggota badan harus dilampirkan. Itu juga host servos dari sendi bahu.

Pencetakan dan perakitan
Setelah pencetakan selesai, kami mengatur tentang pemasangan anggota badan dan perakitan akhir. Dalam versi yang dibongkar, sejenis konstruktor ternyata:



Saat perakitan, hal utama adalah jangan lupa memasukkan bantalan dan traksi servos.

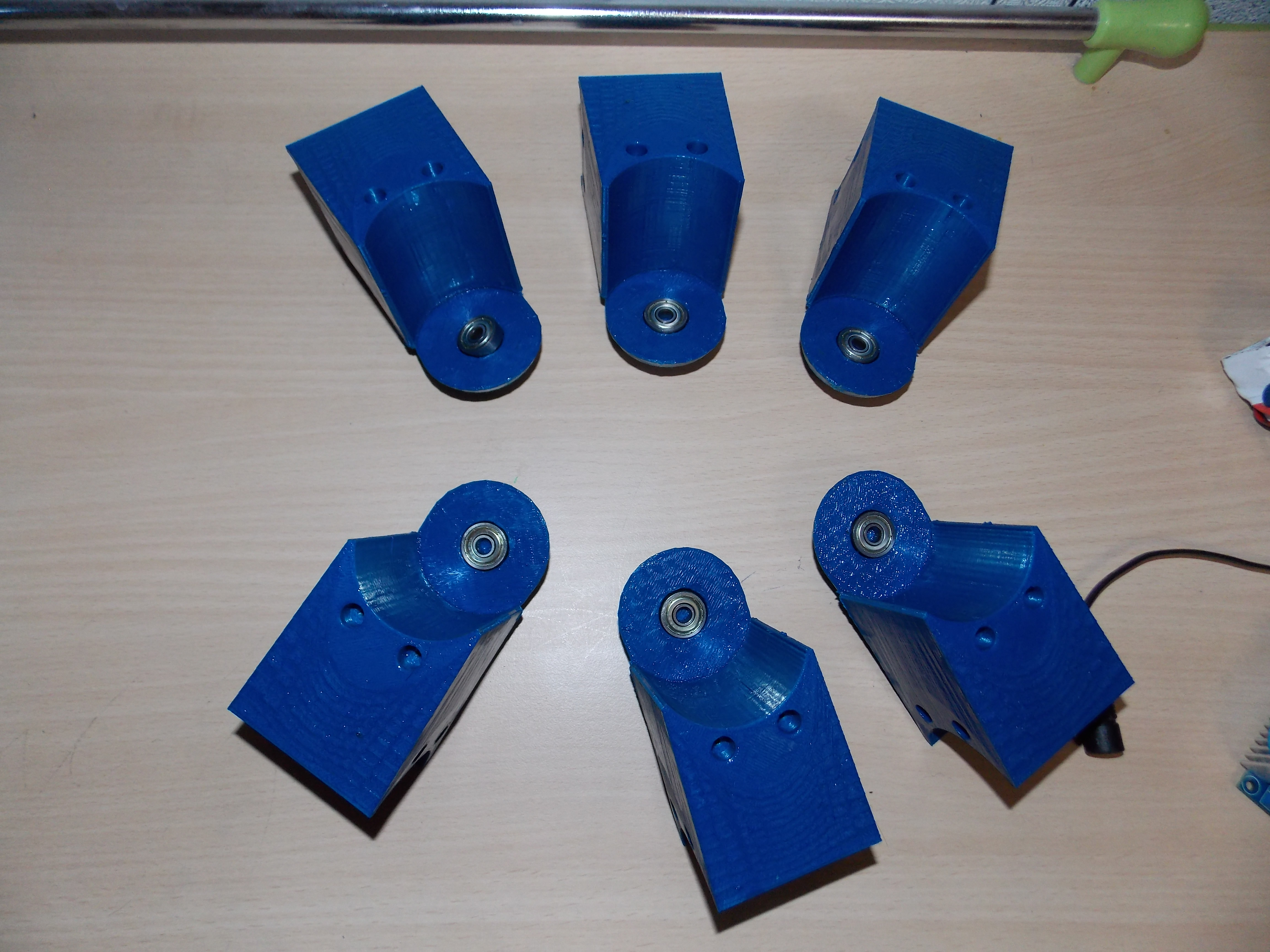
Poin penting: pada saat pertemuan, semua servos harus dibawa ke posisi tengah. Untuk mengkalibrasi posisi sendi bahu, kami mencetak dan mensubsidi stensil khusus.


Sebagai hasilnya, kami mendapatkan platform berkaki enam yang cukup bagus, yang revitalisasi dihuni oleh semua waktu luang kami.

Isi elektronik
Pada saat ini, set utama pengisian elektronik untuk merevitalisasi robot telah dikompilasi dan dikelola. Ini termasuk komponen yang sudah jadi, yaitu:
- Arduino UNO + WiFi R3 ATmega328P + ESP8266 pengendali utama
- Stabilisator yang dapat disesuaikan DC / DC Max 9A 300 W - 6 pcs.
- Baterai arus tinggi HG2 18650 3000 mAh - 3 pcs.
- Pengontrol Biaya BMS 3S 11.1 V 12.6 V 40A
- Multiservo Shield dengan 18 servos yang dikendarai oleh bus I2C.
Penggunaan komponen di luar rak memengaruhi ukuran robot secara negatif. Kami harus membangun tingkat kedua di atas kerangka utama, di mana kami menempatkan stabilisator dan pelindung servo.

Papan Arduino dan sistem tenaga
yang dipasang di atap terletak di tingkat ketiga bangunan. Kami berencana untuk menambahkan beberapa tampilan oled yang mensimulasikan mata, mikrofon, kamera dan sensor jarak.

Saat ini, sebagian besar pekerjaan yang direncanakan telah kami selesaikan. "Hexa" (sebagaimana kami menyebutnya dengan anak robot kami) dibuat dan dapat dikontrol melalui perangkat telnet atau android melalui aplikasi yang ditulis secara khusus.
Kata penutup
Halaman sudah musim dingin yang dalam, hari-hari menjadi lebih panjang dan lebih cerah. Ini berarti musim semi dan suasana hati yang baik sudah dekat. Saya akan senang jika publikasi saya yang pertama dan mudah-mudahan bukan yang terakhir menarik atau bermanfaat bagi siapa pun. Topik artikel hanya difokuskan pada deskripsi proses pembuatan, sehingga perangkat lunak mengisi dan semua yang lain tetap ada di belakang layar. Jika tertarik, Anda dapat mencurahkan artikel berikut untuk topik ini. Siap menjawab semua pertanyaan.
Terima kasih atas perhatian anda!
Model 3D untuk diunduh