Como a DRC-HUBO da Coréia do Sul vence o desafio de robótica da DARPA
 No sábado, a equipe do Instituto Coreano de Ciência e Tecnologia (KAIST) da Coréia do Sul venceu o DARPA Robotics Challenge (DRC) em Pomona, Califórnia, quando seu robô, o humanóide adaptável DRC-HUBO , derrotou outros 22 robôs de cinco países diferentes e ganhou o principal prêmio em dinheiro de US $ 2 milhões.
No sábado, a equipe do Instituto Coreano de Ciência e Tecnologia (KAIST) da Coréia do Sul venceu o DARPA Robotics Challenge (DRC) em Pomona, Califórnia, quando seu robô, o humanóide adaptável DRC-HUBO , derrotou outros 22 robôs de cinco países diferentes e ganhou o principal prêmio em dinheiro de US $ 2 milhões. A capacidade de se transformar de um robô ambulante de duas pernas em um carro sobre rodas teve um papel importante no recebimento do prêmio. Muitos robôs perderam o equilíbrio e caíram no chão, abrindo a porta ou trabalhando com uma furadeira. Mas não a DRC-HUBO . O design exclusivo permitiu que ele concluísse as tarefas mais rapidamente e, mais importante, permanecesse de pé (e com as rodas).
A capacidade de se transformar de um robô ambulante de duas pernas em um carro sobre rodas teve um papel importante no recebimento do prêmio. Muitos robôs perderam o equilíbrio e caíram no chão, abrindo a porta ou trabalhando com uma furadeira. Mas não a DRC-HUBO . O design exclusivo permitiu que ele concluísse as tarefas mais rapidamente e, mais importante, permanecesse de pé (e com as rodas).O movimento de duas pernas [para robôs] ainda não é estável o suficiente ”, disse Rong Ho O, professor de engenharia mecânica no principal instituto científico e técnico da Coréia, o líder da equipe KAIST. - Se um deles funcionar incorretamente, o resultado pode ser catastrófico.
 Ele disse que um robô humanóide tem vantagens ao trabalhar em uma sociedade de pessoas, mas queria desenvolver um design que minimizasse o risco de quedas: "Pensei em muitas coisas, e a coisa mais simples eram as rodas de joelhos".A DRC-HUBO pode mudar de postura, ficar em pé com as duas pernas, andar, alcançar objetos altos e também se mover em uma posição mais estável, de joelhos.A DARPA decidiu organizar a RDC após o incidente de Fukushima no Japão, na esperança de avançar no campo da robótica. Para a competição de finais da RDCas equipes que desenvolviam robôs semi-autônomos foram convidadas e os operadores humanos tiveram que trabalhar juntos para modelar as condições do desastre. Os robôs criados por universidades e empresas para a competição eram muito diferentes em tamanho e forma, entre eles, robôs com pernas, rodas e híbridos.
Ele disse que um robô humanóide tem vantagens ao trabalhar em uma sociedade de pessoas, mas queria desenvolver um design que minimizasse o risco de quedas: "Pensei em muitas coisas, e a coisa mais simples eram as rodas de joelhos".A DRC-HUBO pode mudar de postura, ficar em pé com as duas pernas, andar, alcançar objetos altos e também se mover em uma posição mais estável, de joelhos.A DARPA decidiu organizar a RDC após o incidente de Fukushima no Japão, na esperança de avançar no campo da robótica. Para a competição de finais da RDCas equipes que desenvolviam robôs semi-autônomos foram convidadas e os operadores humanos tiveram que trabalhar juntos para modelar as condições do desastre. Os robôs criados por universidades e empresas para a competição eram muito diferentes em tamanho e forma, entre eles, robôs com pernas, rodas e híbridos.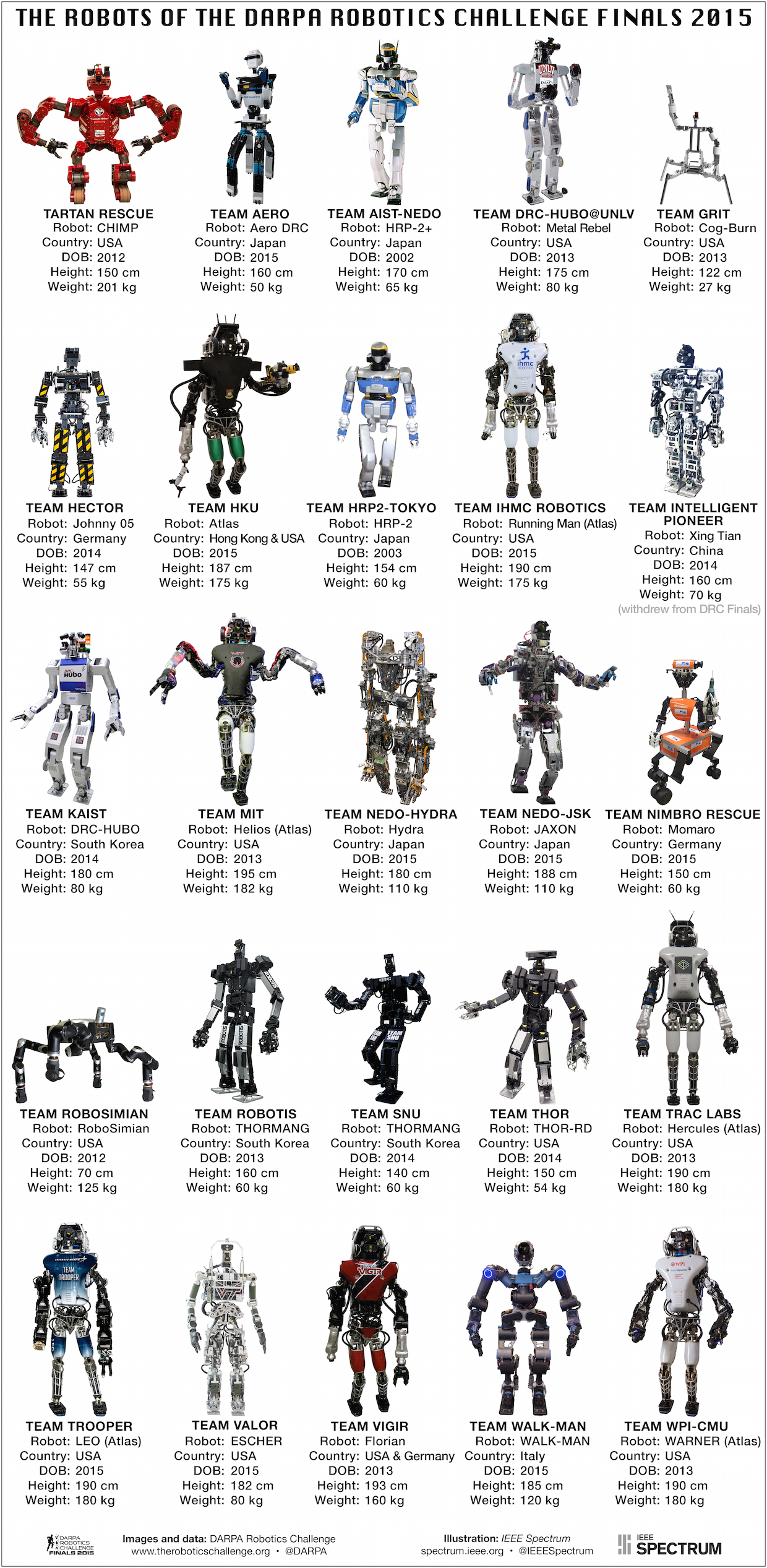 O DRC-HUBO tornou - se um vencedor porque conseguiu concluir todas as oito tarefas sem erros no menor tempo (44 min. 28 s). Outras equipes também tiveram um bom desempenho, mas seus robôs perderam tempo devido a atrasos. Entre os melhores estão a equipe de resgate da Tartan , seu CHIMP é um robô com pernas e trilhas de lagarta, que foi capaz de retornar às tarefas após a queda; Momaroda equipe da Universidade de Bonn - um carro simples e elegante sobre rodas, com a cabeça rotativa e as duas mãos; RoboSimian, do Laboratório de Propulsão a Jato da NASA, com quatro pernas e movimentos semelhantes ao yoga; O ATLAS da equipe IHMC é um grande robô humanóide elétrico desenvolvido pela Boston Dynamics .
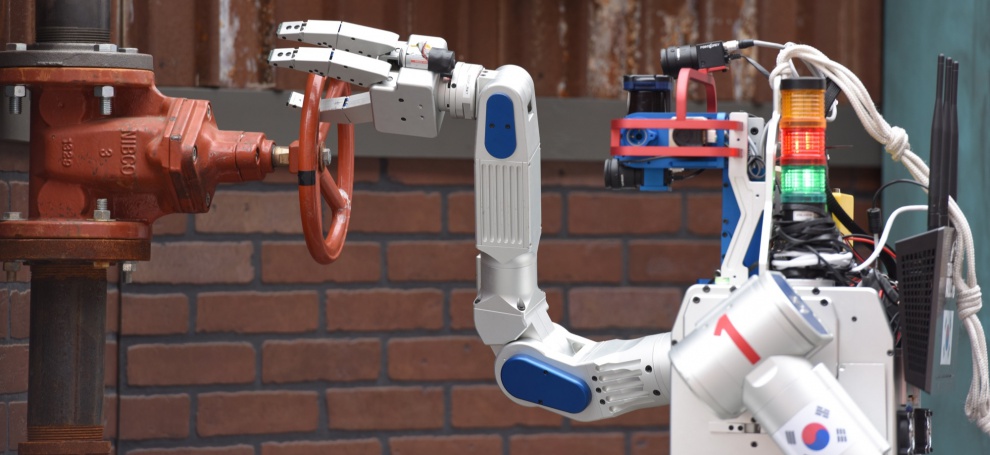
O DRC-HUBO tornou - se um vencedor porque conseguiu concluir todas as oito tarefas sem erros no menor tempo (44 min. 28 s). Outras equipes também tiveram um bom desempenho, mas seus robôs perderam tempo devido a atrasos. Entre os melhores estão a equipe de resgate da Tartan , seu CHIMP é um robô com pernas e trilhas de lagarta, que foi capaz de retornar às tarefas após a queda; Momaroda equipe da Universidade de Bonn - um carro simples e elegante sobre rodas, com a cabeça rotativa e as duas mãos; RoboSimian, do Laboratório de Propulsão a Jato da NASA, com quatro pernas e movimentos semelhantes ao yoga; O ATLAS da equipe IHMC é um grande robô humanóide elétrico desenvolvido pela Boston Dynamics .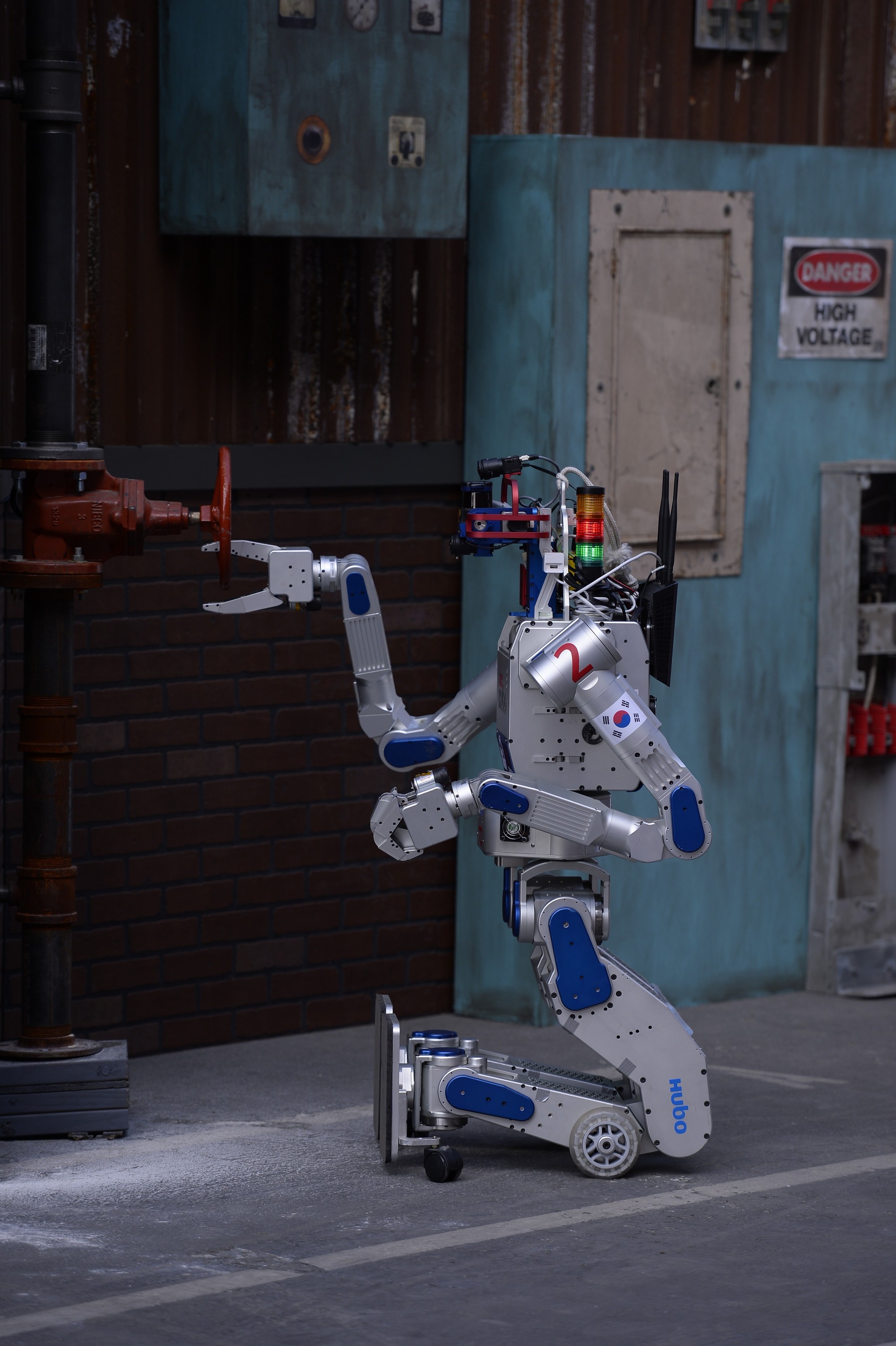 O DRC-HUBO executa a tarefa de fechar a válvula. Observe que a parte superior do corpo é girada 180 graus.
O DRC-HUBO executa a tarefa de fechar a válvula. Observe que a parte superior do corpo é girada 180 graus.A flexibilidade é a coisa mais importante, disse Jill Pratt, gerente da DARPA e organizadora da RDC, em uma reunião com repórteres comentando sobre o design dos robôs. "Um robô que pode mudar a configuração do uso das pernas para o uso das rodas pode ter uma estrutura mais complexa e mais peso, mas oferecerá essa flexibilidade".
O professor O é um especialista reconhecido internacionalmente em robôs humanóides. Ele e seus alunos do KAIST em Daejeon, Coréia do Sul, vêm aprimorando sua plataforma HUBO há gerações. Abaixo está um vídeo que já tem vários anos: o Professor O demonstrou o HUBO 2:Para as finais da RDC, ele decidiu modificar significativamente o robô para prepará-lo para possíveis tarefas. Na master class após a competição, o professor O disse que a DRC-HUBO "não é diferente, é apenas um robô humanóide". Mas, de fato, sua equipe da KAIST elaborou cuidadosamente todos os detalhes. Ele estimou o custo de cada robô em aproximadamente US $ 500.000 e US $ 1 milhão. Abaixo estão os principais recursos que ajudaram a DRC-HUBO a lidar com as tarefas:1. Rodas de joelhos: DRC-HUBOtem rodas nos joelhos e rolos nas pernas. As rodas permitem que o robô se mova de forma rápida e constante. Movendo-se no chão, ele usa sensores ópticos nas canelas para medir a distância usando o fluxo óptico. 2. Motores poderosos: assim como o SCHAFT - o robô que venceu a competição preliminar DARPA e adquirida pelo Google , o DRC-HUBO possui motores muito potentes (possui 33 deles, com 31 graus de livre circulação). Graças a motores especializados e um sistema de refrigeração a ar (ventiladores e pás), o robô pode usar uma tensão de 3-4 vezes mais do que a especificada na especificação do motor, com um valor máximo de 30 amperes em alguns casos.3. Compatibilidade: a equipe queria tornar o robô compatível sem o uso de sensores de torque e do controle automático usual (eles temiam que isso levasse à instabilidade). Portanto, usando um amplificador especial, o problema de compatibilidade foi transferido para o motorista do motor.
2. Motores poderosos: assim como o SCHAFT - o robô que venceu a competição preliminar DARPA e adquirida pelo Google , o DRC-HUBO possui motores muito potentes (possui 33 deles, com 31 graus de livre circulação). Graças a motores especializados e um sistema de refrigeração a ar (ventiladores e pás), o robô pode usar uma tensão de 3-4 vezes mais do que a especificada na especificação do motor, com um valor máximo de 30 amperes em alguns casos.3. Compatibilidade: a equipe queria tornar o robô compatível sem o uso de sensores de torque e do controle automático usual (eles temiam que isso levasse à instabilidade). Portanto, usando um amplificador especial, o problema de compatibilidade foi transferido para o motorista do motor.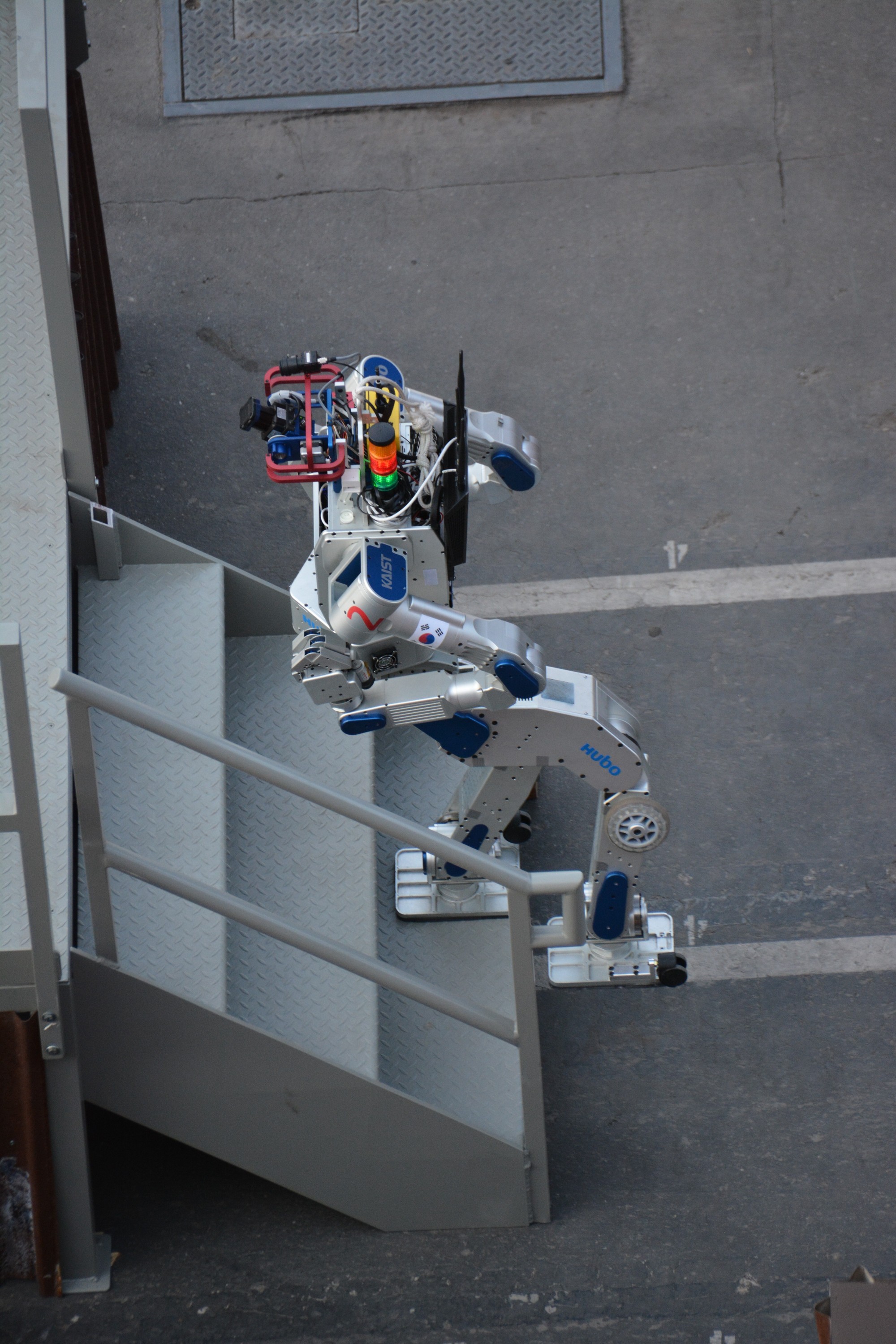 4. Torso rotativo: o DRC-HUBO pode girar a parte superior do corpo em 180 graus. Isso significa que os joelhos do robô podem ser girados em uma direção, enquanto ele pode assistir na direção oposta (tente você mesmo!). Essa habilidade funciona não apenas quando está de pé, mas também quando está de joelhos. O robô aproveitou essa oportunidade em várias tarefas quando foi necessário: dirigir um veículo, perfurar uma parede, mover-se pelos escombros e subir escadas.5. Braços longos: os membros da equipe do KAIST perceberam que os braços do HUBO 2 eram muito curtos para algumas tarefas; portanto, fizeram braços mais longos, girando 7 graus. Eles também ocultaram todos os cabos para dentro, para que não se agarrassem aos objetos ao redor. Cada mão pode suportar até 15 kg de peso e também possui uma “pinça adaptável” que pode agarrar objetos duros e macios.
4. Torso rotativo: o DRC-HUBO pode girar a parte superior do corpo em 180 graus. Isso significa que os joelhos do robô podem ser girados em uma direção, enquanto ele pode assistir na direção oposta (tente você mesmo!). Essa habilidade funciona não apenas quando está de pé, mas também quando está de joelhos. O robô aproveitou essa oportunidade em várias tarefas quando foi necessário: dirigir um veículo, perfurar uma parede, mover-se pelos escombros e subir escadas.5. Braços longos: os membros da equipe do KAIST perceberam que os braços do HUBO 2 eram muito curtos para algumas tarefas; portanto, fizeram braços mais longos, girando 7 graus. Eles também ocultaram todos os cabos para dentro, para que não se agarrassem aos objetos ao redor. Cada mão pode suportar até 15 kg de peso e também possui uma “pinça adaptável” que pode agarrar objetos duros e macios.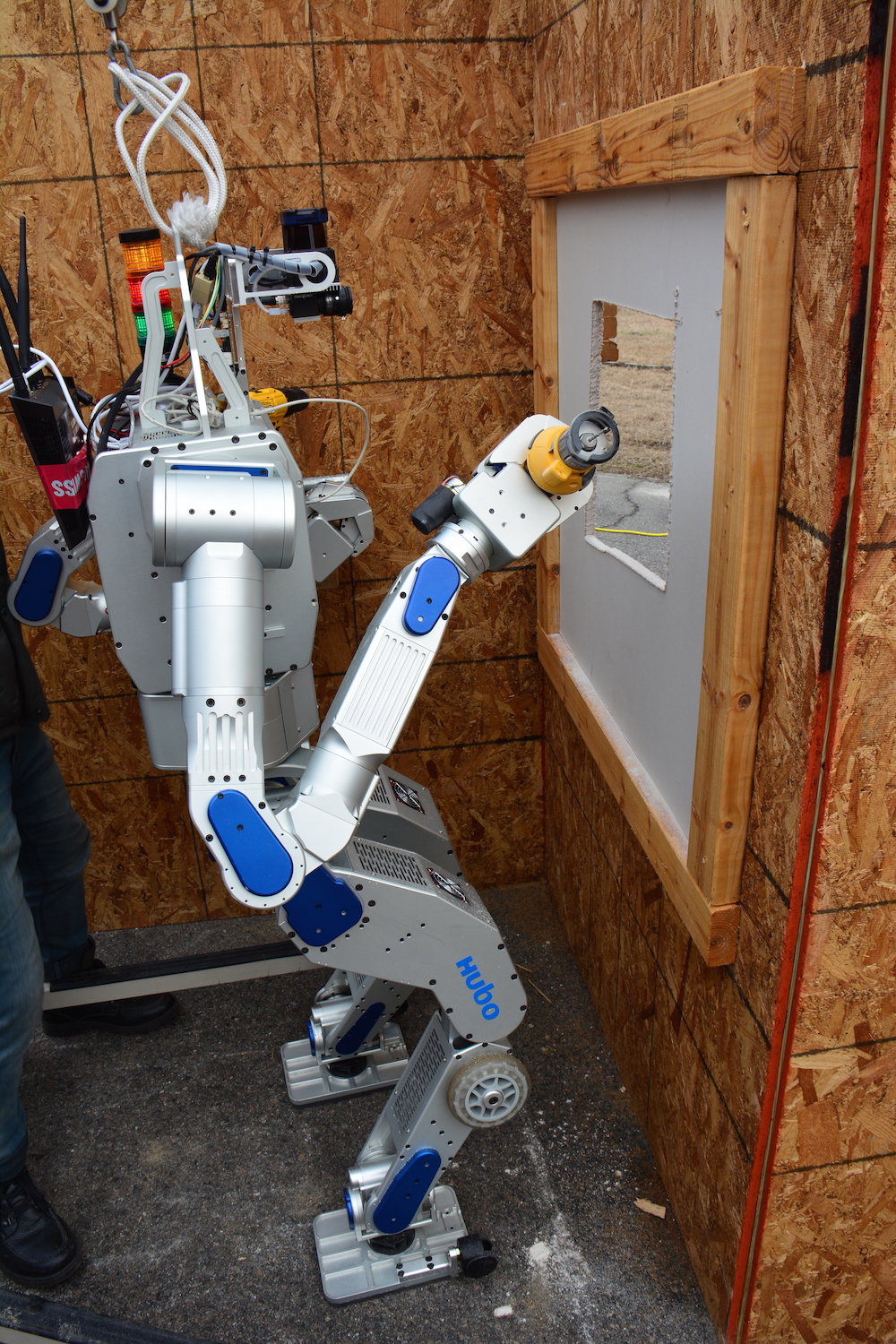 6. Sensoriamento simplificado: em vez de encher a cabeça com sensores, câmeras estereoscópicas e lidares que varrem constantemente o ambiente (essa tecnologia usa o robô ATLAS , por exemplo), o DRC-HUBOpossui um sistema de visão simplificado; os operadores dependem de uma câmera convencional na maioria das vezes, e um lidar conectado a um servoconversor verifica o ambiente apenas quando necessário. De fato, o robô não tem cabeça - “apenas olhos”, observou um dos alunos do KAIST .7. Potência: quando os motores exigem alta potência, o sistema de energia principal pode não ser capaz de fornecer energia suficiente aos componentes importantes da máquina. Para evitar isso, a equipe usou um supercapacitor, que fornece energia para computadores, canais de transmissão e alguns sensores e giroscópios, mesmo que o sistema de energia principal falhe.8. Software especial: a equipe usa o sistema operacional Xenomai em tempo real para Linux e uma estrutura especial de controle de movimento chamada PODO (desenvolvida pela KAIST ). Eles também aproveitam o ambiente de simulação do Gazebo. A equipe desenvolveu seu software com foco na baixa largura de banda e na comunicação instável entre os operadores e o robô.
6. Sensoriamento simplificado: em vez de encher a cabeça com sensores, câmeras estereoscópicas e lidares que varrem constantemente o ambiente (essa tecnologia usa o robô ATLAS , por exemplo), o DRC-HUBOpossui um sistema de visão simplificado; os operadores dependem de uma câmera convencional na maioria das vezes, e um lidar conectado a um servoconversor verifica o ambiente apenas quando necessário. De fato, o robô não tem cabeça - “apenas olhos”, observou um dos alunos do KAIST .7. Potência: quando os motores exigem alta potência, o sistema de energia principal pode não ser capaz de fornecer energia suficiente aos componentes importantes da máquina. Para evitar isso, a equipe usou um supercapacitor, que fornece energia para computadores, canais de transmissão e alguns sensores e giroscópios, mesmo que o sistema de energia principal falhe.8. Software especial: a equipe usa o sistema operacional Xenomai em tempo real para Linux e uma estrutura especial de controle de movimento chamada PODO (desenvolvida pela KAIST ). Eles também aproveitam o ambiente de simulação do Gazebo. A equipe desenvolveu seu software com foco na baixa largura de banda e na comunicação instável entre os operadores e o robô. Agora, vamos dar uma olhada mais de perto na DRC-HUBO e como ela passou por todas as oito tarefas, o que trouxe vitória à equipe do KAIST (se você quiser ver tudo na íntegra, poderá fazê-lo por referência; uma versão acelerada está aqui):
Agora, vamos dar uma olhada mais de perto na DRC-HUBO e como ela passou por todas as oito tarefas, o que trouxe vitória à equipe do KAIST (se você quiser ver tudo na íntegra, poderá fazê-lo por referência; uma versão acelerada está aqui):1. A tarefa de dirigir.
As equipes foram autorizadas a fazer modificações no veículo Polaris para que seus robôs pudessem facilmente entrar e sair do carro. A equipe do KAIST instalou um dispositivo de metal com duas alavancas na parte inferior do carro; quando o DRC-HUBO pressionou uma das alavancas, o sistema de cabos funcionou para que a segunda alavanca pressionasse o acelerador. Com a mão esquerda, o robô segurou o carro e, com a mão direita, controlou o volante. Ele concluiu essa tarefa muito rapidamente (o processo levou um pouco mais de um minuto) e, ao contrário de outras equipes, não parou de ultrapassar obstáculos.2. A tarefa de sair do veículo.
Essa foi uma das tarefas mais difíceis. Preparando-se para ele, professor Oh, como ele nos disse, ele saiu do carro várias vezes para entender quais movimentos e partes do corpo ele usa para isso. Ele concluiu que seria necessária uma "abordagem dinâmica". Sua equipe programou o DRC-HUBO para que ele levantasse as mãos e segurasse a estrutura da máquina. O robô usa 100 Newtons de tração para cada mão. Quando os braços levantam o corpo do robô, ele geralmente sai do carro, embora o movimento seja controlado (graças à "abordagem dinâmica"). Preste atenção à sua maravilhosa manobra para sair do carro por volta das 13:00! O professor O relatou que, durante o desenvolvimento desse movimento, vários motores queimaram, mas o problema foi resolvido usando os motores mais potentes e feitos especialmente. No momento, o robô pode sair do carro em menos de 4 minutos e, quando já está no chão, fica de joelhos e sai.3. A missão com a porta.
Ao contrário de outros robôs que precisavam ficar de pé (e equilibrar-se com as duas pernas) para concluir esta tarefa, o DRC-HUBO podia se ajoelhar girando a maçaneta da porta. Ele habilmente usa a outra mão para manter a porta aberta enquanto gira a maçaneta da porta. Em menos de 2 minutos, ele dirigiu por uma porta.4. A tarefa com a válvula.
Observe que, no início do vídeo, o lidar se move para cima e para baixo para permitir que os operadores varram o terreno na frente do robô. Então, quando o DRC-HUBO se aproxima da válvula de gaveta , ele gira a parte superior do corpo 180 graus. Preste atenção ao seu movimento às 0:20, porque você pode não perceber (o ângulo de disparo não mostra a parte inferior do corpo do robô, infelizmente). Nesta posição, ainda de joelhos, o robô pode levantar o corpo para facilitar o controle da válvula (por que ficar de pé se não for necessário?). O robô varre o terreno usando o lidar, determina a posição e após 3 minutos executa a tarefa. Observe que apenas uma volta foi necessária, mas o DRC-HUBOfez duas voltas completas! Às 2:01, você pode ver o robô "retornar" o torso à sua posição normal.5. A tarefa com a parede.
Essa foi uma tarefa difícil para a maioria das equipes, porque o robô teve que segurar a broca e pressionar o botão liga / desliga para usar o dispositivo. A DRC-HUBO usou sensores de força em cada braço para capturar melhor o instrumento. Você pode ver como o robô se move sozinho e até move a broca na prateleira (derrubando outra broca no caminho) para capturá-la melhor. Quando o robô consegue agarrar a ferramenta, os operadores mostram o local da perfuração e o robô faz o resto. Ele usa 20 Newtons de tração, e você pode ver como ele usa seu corpo para mover a broca perfeitamente em círculo. A conclusão da tarefa leva 11 minutos para o robô.6. O trabalho surpresa.
A tarefa era retirar o plugue e inseri-lo em outra tomada. Observe como o DRC-HUBO varre o chão e percebe que a broca que ele largou anteriormente está em seu caminho. O robô gira e empurra o instrumento com os joelhos. Então ele tenta se virar e parece que está colidindo com uma parede. Os operadores, obviamente, percebem o problema, ele avança um pouco e depois pode se virar. No final, o robô se aproxima da parede com um soquete instalado acima da válvula e da maçaneta da porta. É hora de se levantar e você pode assistir por volta das 3:05. DRC-HUBOdá vários passos adiante e depois de um tempo começa a concluir a tarefa. Ele pega o plugue pelo cabo; acreditamos que o objetivo era que os operadores pudessem ver melhor o plugue e o braço do robô não o ocultasse, o que tornaria a tarefa impossível. Com o tempo, você pode ver isso por volta das 7:47, quando o robô tenta inserir o plugue e perde o soquete. Após vários movimentos corretivos, a tarefa está concluída! 13 minutos e 30 segundos se passaram - mais do que para concluir todas as outras tarefas.7. A tarefa de mover-se pelos escombros.
O DRC-HUBO pode mover os joelhos para a frente ou girar o tronco 180 graus e montar as pernas para a frente, agindo como um balde de escavadeira. E é isso que ele faz para concluir a tarefa. Você pode ver como ele gira o corpo às 0:28. Isso parece legal. O robô levanta as mãos - provavelmente para que não fiquem presas no lixo. Então começa a se mover pelos escombros. Ele para apenas por um segundo, quando parece que um pedaço de madeira está preso em um bloco de concreto, então ele vira um pouco para a esquerda para removê-lo do caminho. Move o tubo de plástico para a direita. Às 4:14, ele vira o tronco novamente e fica na frente dos degraus. A tarefa leva menos de 5 minutos.8. A tarefa com as etapas.
O professor O disse que, para muitas tarefas, especialmente para subir escadas, é importante que o robô possa ver suas pernas. Robôs grandes como o ATLAS dificilmente conseguem fazer isso, eles precisam dobrar o corpo, o que dificulta o equilíbrio. DRC-HUBOresolve esse problema de uma maneira muito inteligente. Ele sobe as escadas para trás! Assim, os joelhos dele não bloqueiam as câmeras e você pode ver as pernas e o chão. Mas como ele pode ver as pernas se ele se levanta para trás? Girando o tronco, é claro! Você pode ver todo o processo, começando em 0:26. O robô se ajoelha na frente da escada e, de repente, vira as costas para ele. Então ele se levanta e, às 0:55, você verá como ele gira o torso em 180 graus. Agora ele pode escanear os degraus e começar a subir. Mas observe que, antes disso, ele dá dois passos para o lado, para a esquerda (1:45)! Depois de alguns minutos - o que pareceu uma eternidade para o público - o robô finalmente começa a subir, quebrando os últimos três passos, um após o outro. Claramente! Em menos de 7 minutos DRC-HUBOfica na plataforma. Não há som no vídeo, mas naquele momento a equipe e o público explodiram em aplausos.O KAIST fez quatro cópias da DRC-HUBO e praticou sem cabos de segurança por mais de um mês antes da competição. Eles treinaram na rua, em um estacionamento com superfície irregular e em diferentes condições climáticas, incluindo forte luz do sol e vento. "Se não removermos os cabos de segurança, os operadores terão medo", disse o professor O na oficina após a competição.Ele acrescentou que, durante o treinamento, eles executavam todas as tarefas nos dois modos - em pé e de joelhos (o tempo médio era de 30 minutos). A equipe foi boa em limpar os escombros com as mãos da RDC-HUBO , que eles não conseguiram demonstrar nas finais da RDC e também puderam realizar tarefas em uma superfície mais difícil do que a que estava na competição., … ! - , .
Source: https://habr.com/ru/post/pt380589/
All Articles