Os robôs podem tocar suavemente objetos delicados.
 Manipulador agarrado por formigas Osengenheiros da Universidade de Ciência e Tecnologia de Iowa criaram um novo tipo de manipuladores para robôs que lhes permitirá lidar com precisão com objetos pequenos e frágeis. Pequenos tubos parecidos com tentáculos envolvem-se em torno do objeto desejado e o seguram sem apertar.O manipulador clássico se parece com pinças, ou dois dedos, com os quais uma pessoa leva objetos. Para segurar o item nos dedos, você precisa apertá-lo. Para evitar esmagar frágeis e estojos, os engenheiros inventam várias ventosas, emulam patas de lagartixa e aplicam outras inovações . Mas os engenheiros americanos decidiram capturar capturas de polvos e afins.Os microtúbulos têm apenas 8 milímetros de comprimento e cerca de 0,2 milímetros de diâmetro. O material dos tubos é o polidimetilsiloxano , um polímero transparente.O princípio de operação dos tubos é simples. Eles estão hermeticamente fechados de um lado e, quando o aparelho bombeia ar para eles, eles endireitam e, quando bombeados, são dobrados em vários anéis.A forma específica da extremidade do tubo e a espessura variável da parede permitem que ele se enrole em espiral de maneira controlada. A forma complexa do tubo foi criada graças à modelagem preliminar por computador. Estes são os primeiros manipuladores em forma de tentáculo que podem ser dobrados de forma a conseguirem ser tão pequenos. Detalhes podem ser encontrados na revista científica Nature .Tais manipuladores encontrarão aplicação no campo dos robôs médicos. Apertos suaves podem ser usados durante as operações para corrigir e mover estruturas como vasos sanguíneos ou tecidos moles.As pernas das aranhas comuns trabalham com um princípio semelhante. As pernas da aranha dobram-se, como de costume, com os músculos e a hemolinfa, um fluido especial que circula pela cavidade do corpo do artrópode, não se dobra pela pressão hidrostática.Os tentáculos há muito tempo atraem engenheiros. Uma solução semelhante com tubos pneumáticos flexíveis já foi demonstrada por cientistas da Harvard School of Engineering and Applied Sciences (EUA).
Manipulador agarrado por formigas Osengenheiros da Universidade de Ciência e Tecnologia de Iowa criaram um novo tipo de manipuladores para robôs que lhes permitirá lidar com precisão com objetos pequenos e frágeis. Pequenos tubos parecidos com tentáculos envolvem-se em torno do objeto desejado e o seguram sem apertar.O manipulador clássico se parece com pinças, ou dois dedos, com os quais uma pessoa leva objetos. Para segurar o item nos dedos, você precisa apertá-lo. Para evitar esmagar frágeis e estojos, os engenheiros inventam várias ventosas, emulam patas de lagartixa e aplicam outras inovações . Mas os engenheiros americanos decidiram capturar capturas de polvos e afins.Os microtúbulos têm apenas 8 milímetros de comprimento e cerca de 0,2 milímetros de diâmetro. O material dos tubos é o polidimetilsiloxano , um polímero transparente.O princípio de operação dos tubos é simples. Eles estão hermeticamente fechados de um lado e, quando o aparelho bombeia ar para eles, eles endireitam e, quando bombeados, são dobrados em vários anéis.A forma específica da extremidade do tubo e a espessura variável da parede permitem que ele se enrole em espiral de maneira controlada. A forma complexa do tubo foi criada graças à modelagem preliminar por computador. Estes são os primeiros manipuladores em forma de tentáculo que podem ser dobrados de forma a conseguirem ser tão pequenos. Detalhes podem ser encontrados na revista científica Nature .Tais manipuladores encontrarão aplicação no campo dos robôs médicos. Apertos suaves podem ser usados durante as operações para corrigir e mover estruturas como vasos sanguíneos ou tecidos moles.As pernas das aranhas comuns trabalham com um princípio semelhante. As pernas da aranha dobram-se, como de costume, com os músculos e a hemolinfa, um fluido especial que circula pela cavidade do corpo do artrópode, não se dobra pela pressão hidrostática.Os tentáculos há muito tempo atraem engenheiros. Uma solução semelhante com tubos pneumáticos flexíveis já foi demonstrada por cientistas da Harvard School of Engineering and Applied Sciences (EUA).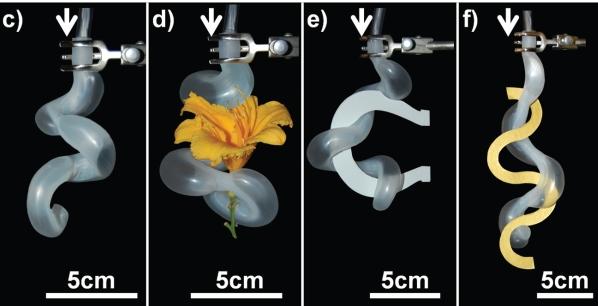 Criação de engenheiros de HarvardA partir de soluções incomuns, podemos lembrar o conceito da prótese , na qual o motor puxa e solta os cabos passados através do tentáculo. Eles permitem que a prótese se enrole gradualmente, capturando objetos de pequeno a grande porte. A prótese se endireita devido à elasticidade interna.
Criação de engenheiros de HarvardA partir de soluções incomuns, podemos lembrar o conceito da prótese , na qual o motor puxa e solta os cabos passados através do tentáculo. Eles permitem que a prótese se enrole gradualmente, capturando objetos de pequeno a grande porte. A prótese se endireita devido à elasticidade interna. Prótese tentáculo
Prótese tentáculoSource: https://habr.com/ru/post/pt380865/
All Articles