A ideia de criar um controle deslizante de vídeo, e também motorizado, ocorreu-me em agosto de 2014. Naquela época, eu fotografava paisagens estreladas noturnas há mais de um ano e decidi me dedicar aos negócios de timelapse.Em timelapse "animação da imagem" é sempre apreciada! A mudança de quadros feitos em uma câmera montada estaticamente na maioria dos casos não afeta o visualizador com a mesma plotagem, mas já foi filmada em uma câmera em movimento no espaço. A composição do vídeo é preenchida com dinâmica ilimitada, deixando uma boa impressão no vídeo! E as vendas de tais equipamentos? Sem problemas! Isso é apenas assustador nos preços cósmicos ... No processo de busca de opções, seja de marca ou chinesa, você conclui que o conceito de "controle deslizante motorizado do orçamento" não existe na natureza! A opção de orçamento é apenas se você mesmo a projetar! Foi exatamente o que eu fiz!Eu não comecei a fabricar o controle deslizante imediatamente, até encontrar uma saída, como fazer um trilho a baixo custo! Tudo começou com ela.Na loja de móveis, comprei guias para acessórios e rolos para móveis.
E as vendas de tais equipamentos? Sem problemas! Isso é apenas assustador nos preços cósmicos ... No processo de busca de opções, seja de marca ou chinesa, você conclui que o conceito de "controle deslizante motorizado do orçamento" não existe na natureza! A opção de orçamento é apenas se você mesmo a projetar! Foi exatamente o que eu fiz!Eu não comecei a fabricar o controle deslizante imediatamente, até encontrar uma saída, como fazer um trilho a baixo custo! Tudo começou com ela.Na loja de móveis, comprei guias para acessórios e rolos para móveis.
 Para a base dos trilhos, usei a regra de construção de alumínio de 1,5 m de comprimento, disponível na fazenda (o nível interno ajuda a instalar suavemente o controle deslizante). Com a ajuda de uma broca, rebites de exaustão e inserções de madeira compensada nas duas extremidades da régua, um trilho de 2 metros de comprimento foi feito em apenas algumas horas.
Para a base dos trilhos, usei a regra de construção de alumínio de 1,5 m de comprimento, disponível na fazenda (o nível interno ajuda a instalar suavemente o controle deslizante). Com a ajuda de uma broca, rebites de exaustão e inserções de madeira compensada nas duas extremidades da régua, um trilho de 2 metros de comprimento foi feito em apenas algumas horas. Continua sendo o caso do transporte. Eu fiz isso de plexiglás durável. Os rolos foram presos com parafusos e porcas marcados com M6.
Continua sendo o caso do transporte. Eu fiz isso de plexiglás durável. Os rolos foram presos com parafusos e porcas marcados com M6. O primeiro teste falhou, infelizmente. A carruagem rolou em empurrões, e no vídeo foi muito perceptível (movimento suave para baixo e para cima). Tudo isso se deve aos rolos normalmente não centrados na produção (embora o vendedor tenha dito que os acessórios são italianos). A saída é bloquear todas as rodas. Agora eles desempenham o papel de mancais de deslizamento. A carruagem começou a deslizar linearmente no trilho!
O primeiro teste falhou, infelizmente. A carruagem rolou em empurrões, e no vídeo foi muito perceptível (movimento suave para baixo e para cima). Tudo isso se deve aos rolos normalmente não centrados na produção (embora o vendedor tenha dito que os acessórios são italianos). A saída é bloquear todas as rodas. Agora eles desempenham o papel de mancais de deslizamento. A carruagem começou a deslizar linearmente no trilho!
 Para manter o trilho em tripés, duas plataformas de tripé foram acopladas a ele. Aqui eles são feitos em casa, feitos de madeira compensada. Fixado com parafusos e porcas M6.
Para manter o trilho em tripés, duas plataformas de tripé foram acopladas a ele. Aqui eles são feitos em casa, feitos de madeira compensada. Fixado com parafusos e porcas M6.






Eletricista
O que eu queria fazer inicialmente? Inicialmente, planejava-se usar uma unidade para o transporte. Para fazer isso, você só precisa de um motor de alto torque, uma bateria e um microcircuito para controlar a velocidade. Pela primeira vez, aprendi sobre servos e decidi levá-lo ao meu projeto. O chip era um servo testador que pode controlar a velocidade do servo. O que você precisa! Precisa pegar! Mas não temos pressa ...Um conhecimento mais profundo do servoconversor surgiu com um conceito como o Arduino. E isso é bom! Mais uma vez, pensei no projeto e decidi que no controle deslizante não era necessário um movimento constante de carruagem, mas sim um intervalo. Afinal, o movimento durante a exposição (fotografia noturna - exposições longas) pode rejeitar o quadro com desfoque.E como terei uma unidade de controle tão inteligente, decidi complementar meu controle deslizante com outro mecanismo. Além de se mover pelos trilhos, a câmera também gira em torno de um eixo vertical. O design pode ser chamado de "controle deslizante de vídeo com um astrotracker a bordo".Então, foi comprado:- Microcontrolador Arduino UNO R3
- Servo TowerPro MG995 13kg / cm
- Motor de passo 28byj-48-5v + Driver ULN2003
Primeiro, fiz a montagem do servo no trilho a partir do mesmo plexiglass.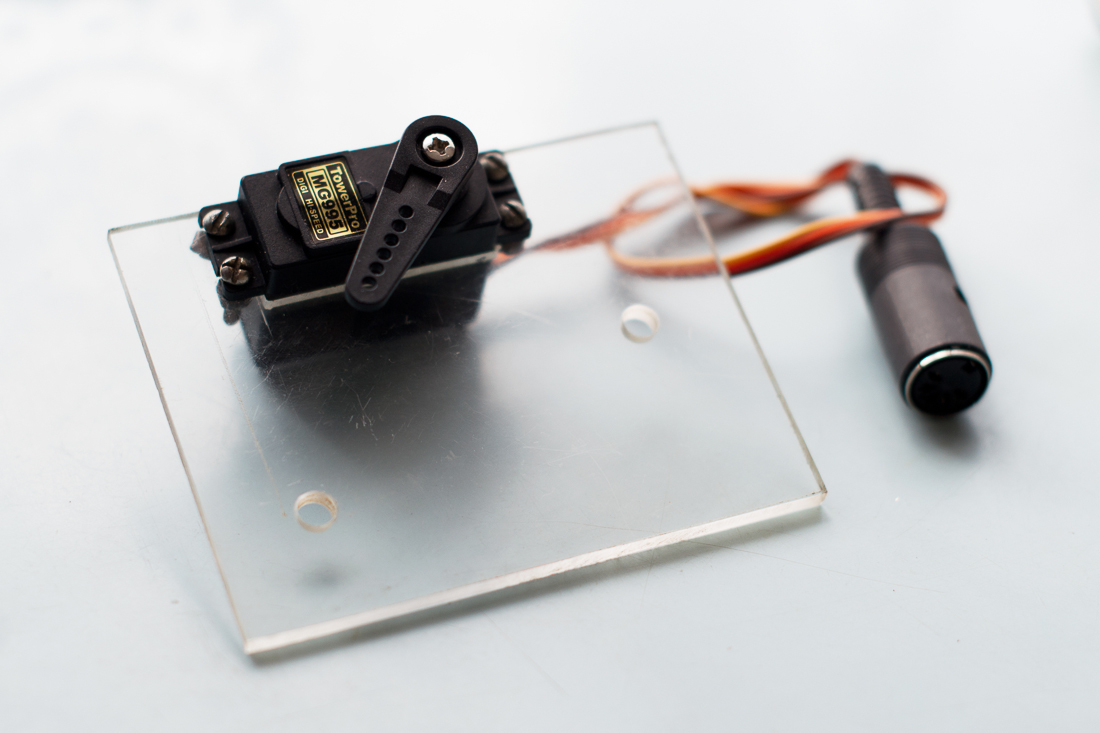 O carro e o servo foram conectados por uma rosca inextensível, enrolada em seu eixo.A câmera é girada usando um motor de passo 28byj-48 , montado em uma engrenagem sem-fim de 1/55.
O carro e o servo foram conectados por uma rosca inextensível, enrolada em seu eixo.A câmera é girada usando um motor de passo 28byj-48 , montado em uma engrenagem sem-fim de 1/55. Decidi defender o Arduino e outros componentes elétricos do plexiglás. Colei tudo com supercola, embora eles usem cola especial para esse material, que solda as peças umas às outras e depois não as separa. Para conectar os motores à unidade de controle, fiz dois cabos, nos quais utilizei conectores soviéticos confiáveis e comprovados do tipo DIN 5 PIN .
Decidi defender o Arduino e outros componentes elétricos do plexiglás. Colei tudo com supercola, embora eles usem cola especial para esse material, que solda as peças umas às outras e depois não as separa. Para conectar os motores à unidade de controle, fiz dois cabos, nos quais utilizei conectores soviéticos confiáveis e comprovados do tipo DIN 5 PIN . A energia é fornecida através de um conector DC comum.Bateria: 7.2V, 2250mAh :
A energia é fornecida através de um conector DC comum.Bateria: 7.2V, 2250mAh : Primeiro tempo de teste elétrico! Conectamos os motores, alimentamos, instalamos a câmera, conectamos o controle remoto a ele, configuramos para o Arduino: velocidade do obturador 30 segundos, intervalo 5 segundos. Pressionamos simultaneamente iniciar no controle remoto e no Arduino. Estamos esperando ...Em menos de cinco minutos, a assincronia foi descoberta no trabalho. O motor principal começou a girar quando o obturador ainda estava aberto. O problema é o controle remoto: não conta o tempo corretamente. Se, em tempo real, se passarem 30 segundos, o contador no controle remoto contará apenas 28 a 29 segundos. Ele está diminuindo a velocidade. Talvez devido ao fato de que os chineses ou por algum outro motivo (será interessante aprender com você por que)!Para evitar isso, você precisa fazer tudo com base em um sistema - o Arduino. Mas como controlar o obturador da câmera através do Arduino?Google novamente para ajudar!Adaptador do controle remoto :
Primeiro tempo de teste elétrico! Conectamos os motores, alimentamos, instalamos a câmera, conectamos o controle remoto a ele, configuramos para o Arduino: velocidade do obturador 30 segundos, intervalo 5 segundos. Pressionamos simultaneamente iniciar no controle remoto e no Arduino. Estamos esperando ...Em menos de cinco minutos, a assincronia foi descoberta no trabalho. O motor principal começou a girar quando o obturador ainda estava aberto. O problema é o controle remoto: não conta o tempo corretamente. Se, em tempo real, se passarem 30 segundos, o contador no controle remoto contará apenas 28 a 29 segundos. Ele está diminuindo a velocidade. Talvez devido ao fato de que os chineses ou por algum outro motivo (será interessante aprender com você por que)!Para evitar isso, você precisa fazer tudo com base em um sistema - o Arduino. Mas como controlar o obturador da câmera através do Arduino?Google novamente para ajudar!Adaptador do controle remoto : O adaptador do controle remoto está conectado em uma extremidade da câmera e a outra (tomada 2.5) no fio do controle remoto. O Jack 2.5 possui três contatos e, pelo princípio do controle remoto da câmera, aprendi que, para acionar o obturador, dois desses três contatos devem ser fechados. Depois de tentar várias combinações, achei que funcionava!Fiz um cabo de dois núcleos, um dos quais possui um conector de 2,5 pinos para a mãe e é conectado através desse adaptador do controle remoto à câmera, o outro lado é da unidade de controle. Dentro dele, eu vim com a ajuda de um botão mecânico para fechar essas duas veias. É feito de micro servo e botão de contato.Um micro-servo rocker pressiona um botão de relógio em um determinado momento, fechando assim dois contatos e a câmera tira uma foto:
O adaptador do controle remoto está conectado em uma extremidade da câmera e a outra (tomada 2.5) no fio do controle remoto. O Jack 2.5 possui três contatos e, pelo princípio do controle remoto da câmera, aprendi que, para acionar o obturador, dois desses três contatos devem ser fechados. Depois de tentar várias combinações, achei que funcionava!Fiz um cabo de dois núcleos, um dos quais possui um conector de 2,5 pinos para a mãe e é conectado através desse adaptador do controle remoto à câmera, o outro lado é da unidade de controle. Dentro dele, eu vim com a ajuda de um botão mecânico para fechar essas duas veias. É feito de micro servo e botão de contato.Um micro-servo rocker pressiona um botão de relógio em um determinado momento, fechando assim dois contatos e a câmera tira uma foto: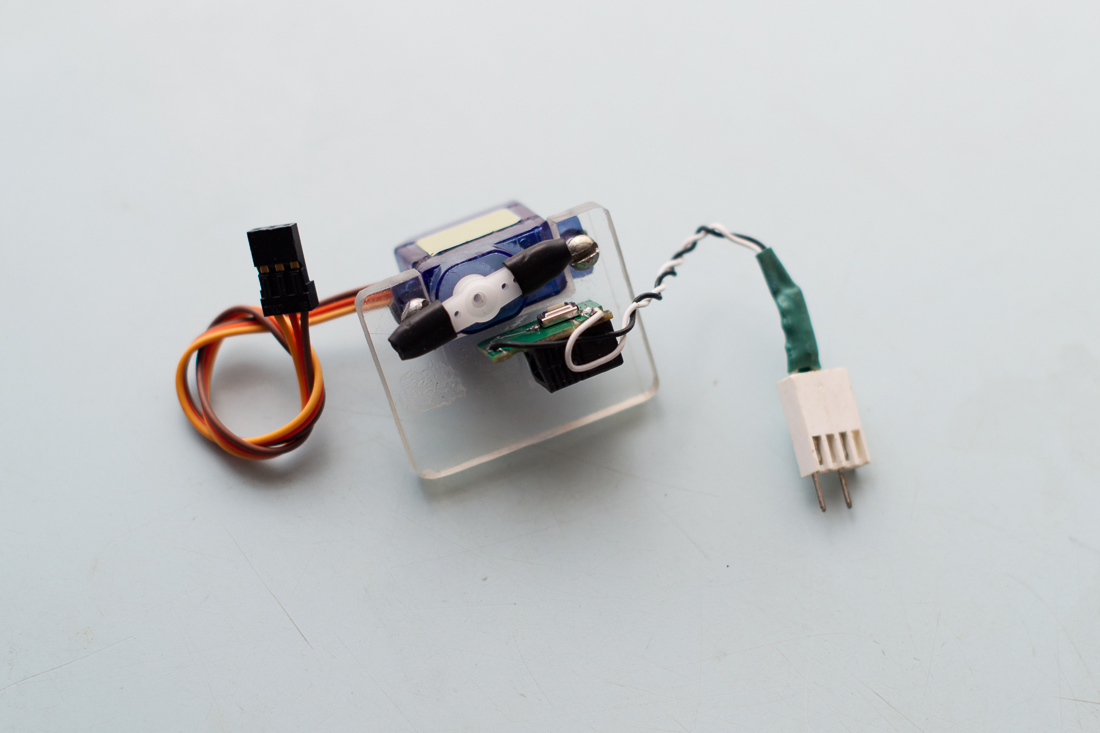 Cabo do núcleo: cabo de
Cabo do núcleo: cabo de dois núcleos + adaptador remoto:
dois núcleos + adaptador remoto: No final do outono, quando há um freezer pequeno, decidi testar o controle deslizante e encontrei outro defeito: mesmo a + 2 ° C, o servo principal se recusava a trabalhar. Isso ocorreu devido ao espessamento da lubrificação da engrenagem. Após 5 a 10 minutos, o servo ficou preso nessa temperatura.Mais tarde, já no inverno real, quando havia geadas até -10 ° C, o micro servo também se fez sentir! Embora à mesma temperatura a + 2 ° C, na qual o grande MG995 parou de funcionar, o botão mecânico funcionou de forma estável e não causou nenhuma reclamação. Aparentemente, isso se deve ao fato de ela estar em um caso com um Arduino, que não permitia que um micro motor congelasse rapidamente. Então o botão funcionou bem, mas agora o sinal do disparador do obturador não era enviado todas as vezes, e não é disso que precisamos. Eu tive que modificar.Logo ele encontrou uma solução para a liberação do motor e do obturador. Comprei um motor de passo bipolar como o Nema 17 e mais um volumoso driver caseiro do vendedor. E nenhuma geada é agora um obstáculo!
No final do outono, quando há um freezer pequeno, decidi testar o controle deslizante e encontrei outro defeito: mesmo a + 2 ° C, o servo principal se recusava a trabalhar. Isso ocorreu devido ao espessamento da lubrificação da engrenagem. Após 5 a 10 minutos, o servo ficou preso nessa temperatura.Mais tarde, já no inverno real, quando havia geadas até -10 ° C, o micro servo também se fez sentir! Embora à mesma temperatura a + 2 ° C, na qual o grande MG995 parou de funcionar, o botão mecânico funcionou de forma estável e não causou nenhuma reclamação. Aparentemente, isso se deve ao fato de ela estar em um caso com um Arduino, que não permitia que um micro motor congelasse rapidamente. Então o botão funcionou bem, mas agora o sinal do disparador do obturador não era enviado todas as vezes, e não é disso que precisamos. Eu tive que modificar.Logo ele encontrou uma solução para a liberação do motor e do obturador. Comprei um motor de passo bipolar como o Nema 17 e mais um volumoso driver caseiro do vendedor. E nenhuma geada é agora um obstáculo!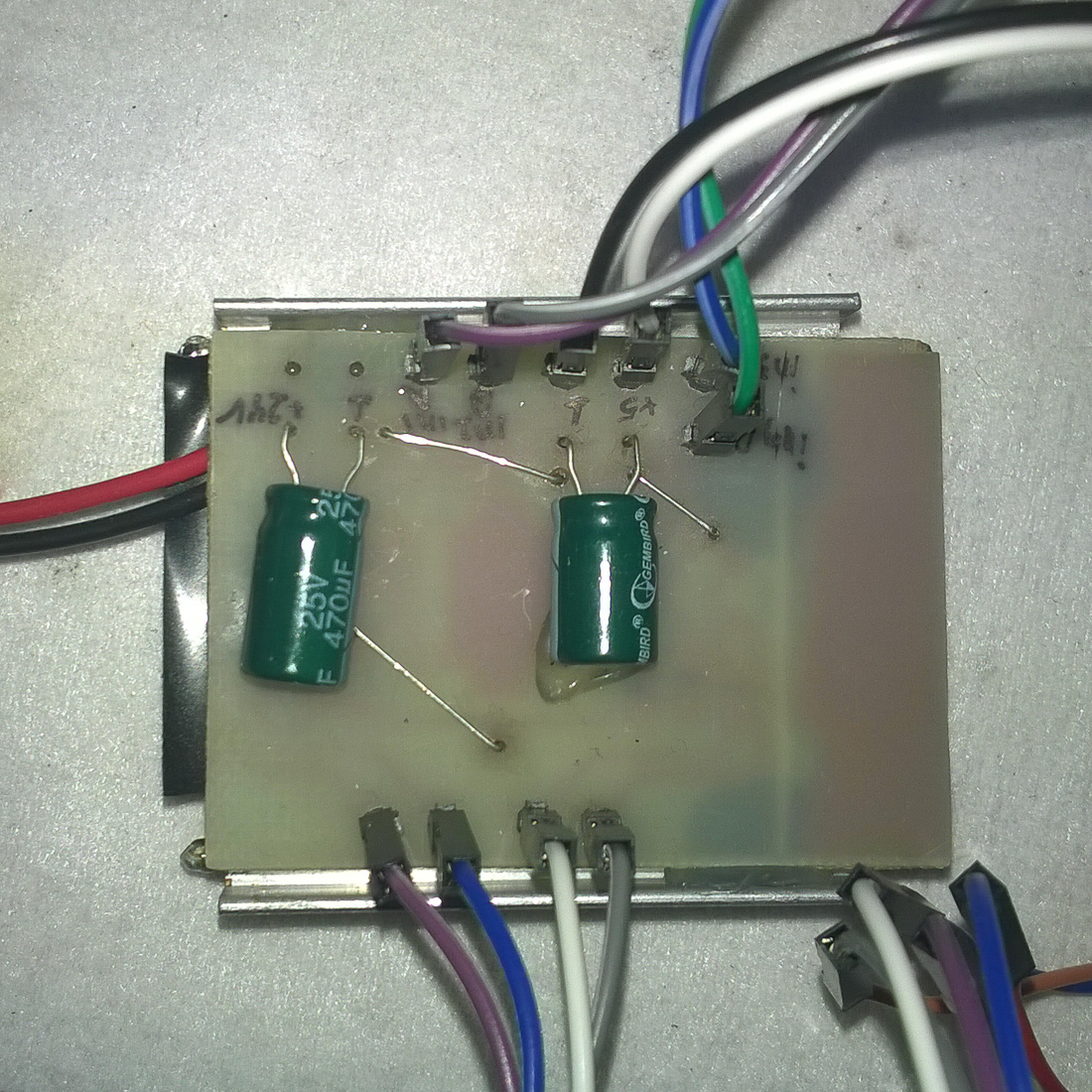 Também usei esse motor de passo em conjunto com uma caixa de câmbio 1/55 semelhante, sobre a qual escrevi acima. O cabo está enrolado em um carretel.
Também usei esse motor de passo em conjunto com uma caixa de câmbio 1/55 semelhante, sobre a qual escrevi acima. O cabo está enrolado em um carretel. Resolvi o problema com o botão lendo um artigo na Internet sobre um intervalômetro caseiro para uma câmera baseada em Arduino. Lá, um transistor convencional foi usado para fechar o circuito (dois contatos).Eu também me livrei de um enorme motorista caseiro, que foi brutalmente aquecido devido à alta corrente nele, e poderia simplesmente falhar na hora errada. Substituindo-o depois pelo famoso EasyDriver , tive a oportunidade de ajustar a corrente no driver devido ao resistor de sintonia nele. A força da corrente afeta proporcionalmente o torque do motor. É aqui menos da metade da norma máxima, pois é usada uma caixa de engrenagens sem-fim com uma grande relação de transmissão. O motorista começou a aquecer significativamente menos.Também no EasyDriveré possível organizar facilmente um "modo de suspensão" quando o motorista está desligado e não consome corrente no momento de espera do motor - o motor está completamente desligado. A capacidade de dividir a etapa também não é um recurso extra! Agora, sem problemas, você pode fazer uma cópia relativamente idêntica da unidade de controle dos componentes adquiridos na loja!Agora, há muito mais espaço no caso do que era.ANTES
Resolvi o problema com o botão lendo um artigo na Internet sobre um intervalômetro caseiro para uma câmera baseada em Arduino. Lá, um transistor convencional foi usado para fechar o circuito (dois contatos).Eu também me livrei de um enorme motorista caseiro, que foi brutalmente aquecido devido à alta corrente nele, e poderia simplesmente falhar na hora errada. Substituindo-o depois pelo famoso EasyDriver , tive a oportunidade de ajustar a corrente no driver devido ao resistor de sintonia nele. A força da corrente afeta proporcionalmente o torque do motor. É aqui menos da metade da norma máxima, pois é usada uma caixa de engrenagens sem-fim com uma grande relação de transmissão. O motorista começou a aquecer significativamente menos.Também no EasyDriveré possível organizar facilmente um "modo de suspensão" quando o motorista está desligado e não consome corrente no momento de espera do motor - o motor está completamente desligado. A capacidade de dividir a etapa também não é um recurso extra! Agora, sem problemas, você pode fazer uma cópia relativamente idêntica da unidade de controle dos componentes adquiridos na loja!Agora, há muito mais espaço no caso do que era.ANTES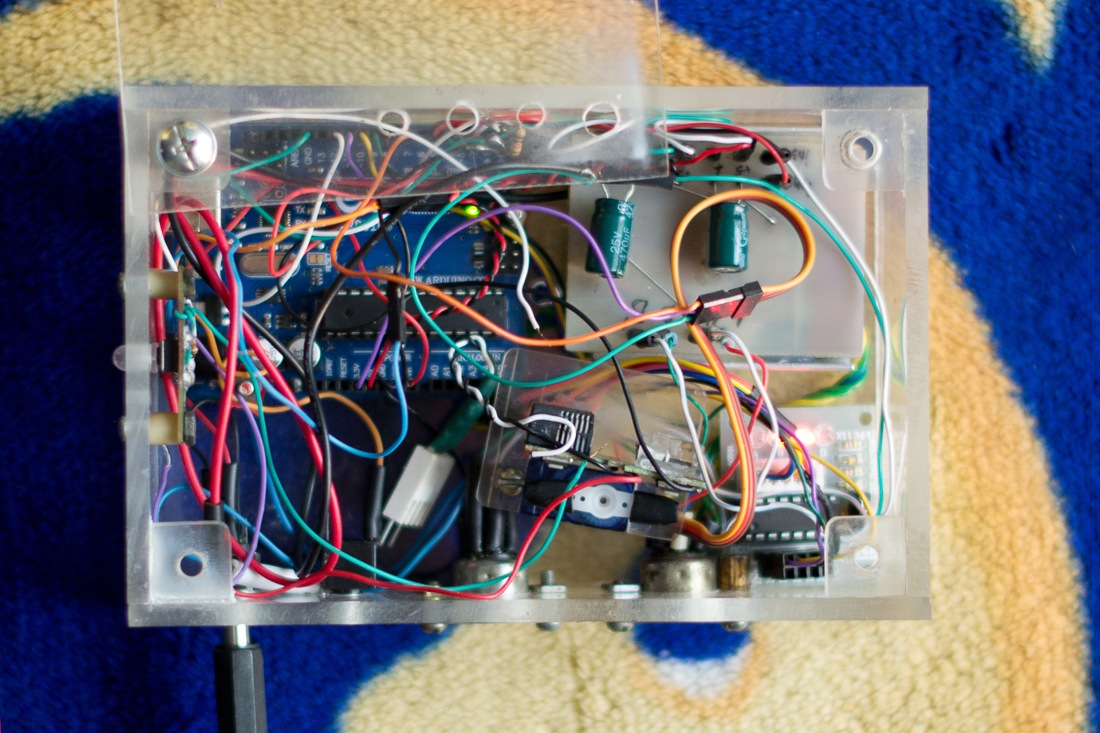 DEPOIS
DEPOIS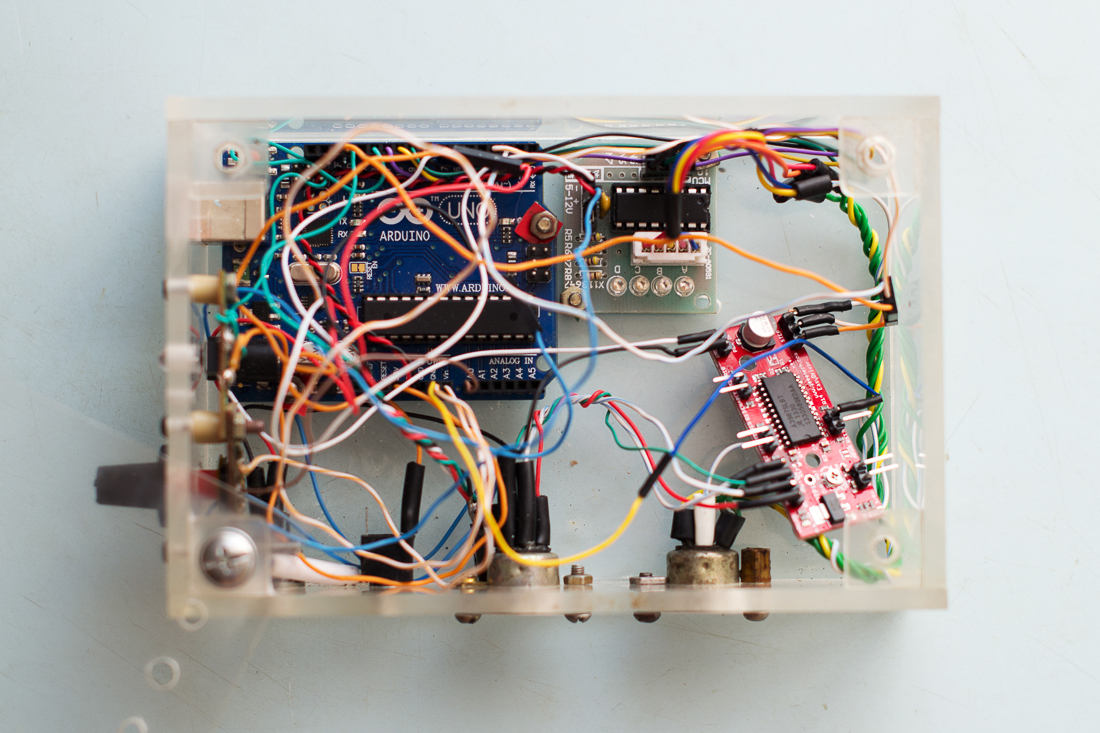
Tempo
Passei a maior parte aprendendo programação no Arduino. E mesmo agora, meu esboço pode ser modificado. Existe apenas um problema. Não consigo fazer com que pressionar o botão do relógio alterne o modo de operação e permaneça em um deles constantemente. Os modos diferem apenas no tempo de exposição. O intervalo é sempre o mesmo e igual a 3,5 segundos. Eu tentei muito, mas enquanto houver essa opção. Escrevi no final do inverno e combina comigo.É simples: a velocidade do obturador é definida e equiparada ao período decorrido desde o início do programa até o momento de um único toque no botão do relógio. Para alterá-lo, você precisa reiniciar o Arduino.Esboço:#include <Stepper.h>
int Distance = 0;
int x = 0;
#define STEPS_MOTOR 32
#define STEPS_OUTPUT 32 * 64
Stepper stepper2(STEPS_MOTOR, 8, 10, 9, 11);
int steps;
int button = 12;
int previousMillis = 0;
void setup()
{
pinMode(13, OUTPUT);
pinMode(12, INPUT);
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(7, OUTPUT);
}
void loop()
{
if (digitalRead(12) == HIGH)
{
previousMillis = millis();
int x = map(previousMillis,60000, 0, 78, 0);
a:
digitalWrite(2, HIGH);
digitalWrite(3, LOW);
{
digitalWrite(3, HIGH);
delayMicroseconds(552);
digitalWrite(3, LOW);
delayMicroseconds(552);
Distance = Distance + 1;
if (Distance == 3620)
{
if (digitalRead(2) == HIGH)
{
digitalWrite(2, HIGH);
}
else
{
digitalWrite(2, LOW);
}
digitalWrite(2, LOW);
digitalWrite(3, LOW);
steps = STEPS_OUTPUT;
stepper2.setSpeed(161.25);
stepper2.step(steps = - x);
digitalWrite(8, LOW);
digitalWrite(10, LOW);
digitalWrite(9, LOW);
digitalWrite(11, LOW);
delay(500);
digitalWrite(13, HIGH);
digitalWrite(7, HIGH);
delay(50);
digitalWrite(7, LOW);
digitalWrite(13, LOW);
delay(previousMillis-3050);
Distance = 0;
}
}
goto a;
}}
Instalação do slider


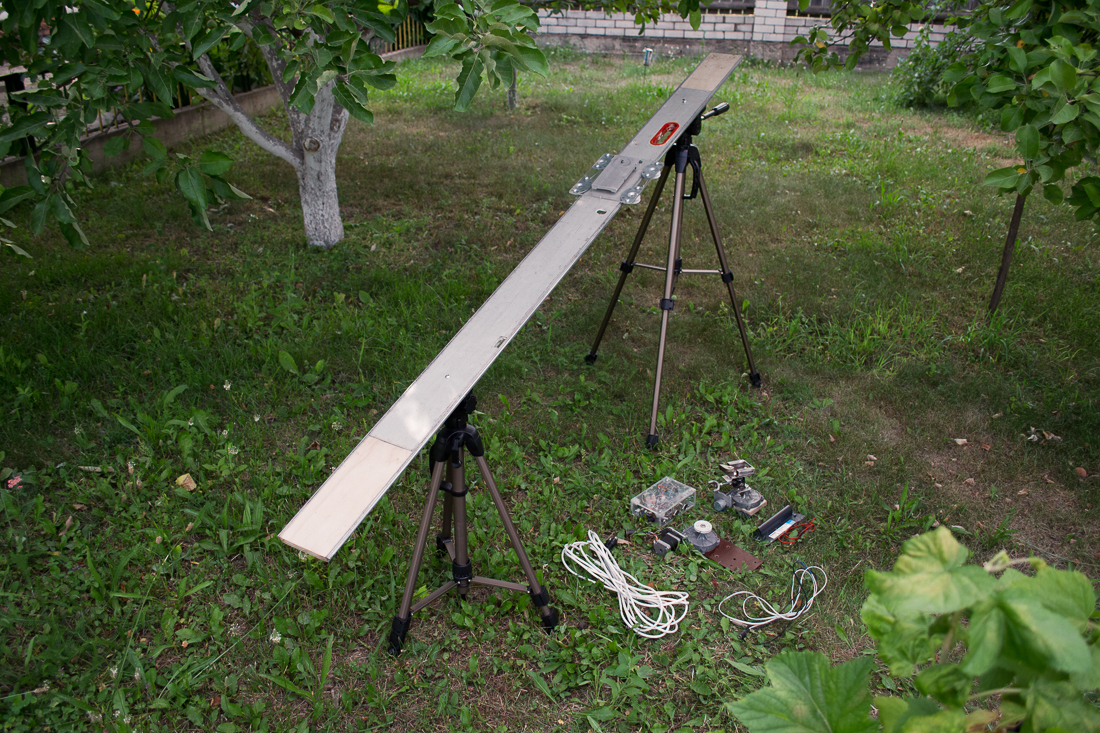

Tudo está conectado. O controle deslizante está pronto para ir!




achados
O que eu penso:No momento, o controle deslizante está pronto para uso e está cumprindo totalmente seu objetivo, mas há algumas nuances que eu gostaria de finalizar no futuro. Quase todos eles pertencem à carruagem. Eu acho que você percebeu.Precisamos de um mecanismo mais confiável para manter o "astrotracker". O eixo do seu eixo deve ser sempre perpendicular ao solo. A cabeça do tripé de marca dará ao meu design uma aparência ainda mais estética, originalmente concebida por mim! Quanto à eletrônica: é assim que me convém aqui, até o esboço do Arduino! De qualquer forma, já alcancei o resultado planejado!Um exemplo puramente técnico do controle deslizante (inverno, fevereiro, -15 ° C):O custo deste controle deslizante de vídeo é inferior a US $ 100, sem incluir o custo de dois tripés.Obrigado pela atenção! Boa sorte a todos em caseiros!