Resgate do afogamento - o trabalho dos robôs
 Hoje, a robótica moderna é dividida, em geral, em quatro categorias principais:
Hoje, a robótica moderna é dividida, em geral, em quatro categorias principais:- robôs industriais, estacionários ou em movimento dentro das instalações,
- robôs domésticos (até agora representados principalmente por aspiradores de pó),
- robôs militares
- e robôs para entretenimento.
Obviamente, essa divisão é muito condicional. Mas todas as outras categorias ainda estão em um estado de graus variados de embrião. O uso de robôs tem um grande potencial em muitos campos de atividade. Mas a introdução ativa de assistentes mecânicos ainda é limitada por vários fatores e principalmente por dificuldades científicas e técnicas. Ao mesmo tempo, uma das áreas mais promissoras da robótica é o resgate de pessoas em áreas de grandes acidentes tecnológicos e desastres naturais. Este tópico está se tornando cada vez mais relevante ao longo dos anos.A própria idéia de robôs de resgate, como robôs soldados, não é absolutamente nova. E o principal obstáculo aqui se torna não tanto uma complexidade técnica, mas também algorítmica. Não é fácil para as pessoas encontrar sobreviventes, mas como os robôs podem aprender isso? Obviamente, essa tarefa ainda não pode ser totalmente atribuída a eles. Mas, no entanto, os robôs já podem ser usados para resolver alguns problemas durante as operações de busca e salvamento, e eles podem fazer isso de forma mais rápida e eficiente que os humanos.Avalanche
Nesta situação, o tempo é um fator crítico. Não há mais de 15 minutos para salvar as pessoas cobertas de neve, até que elas morram de asfixia. Durante esse período, você precisa encontrar sobreviventes em uma enorme área coberta por uma camada instável de neve, o que é um perigo para os próprios socorristas. Agora, os escaladores já estão levando balizas individuais e também são usados sinais de celular. Mas isso ainda não permite uma pesquisa rápida o suficiente.Uma das tentativas de resolver esse problema foi a criação do projeto Sherpa , no âmbito do qual está sendo criada uma “plataforma robótica” para operações de busca e salvamento em montanhas. Este é um sistema composto por três tipos de robôs controlados por rádio:- , . .
- -, , , , . .
- , -. , . .
Além disso, um contêiner especial é usado para transportar suprimentos, equipamentos e drones, que também funcionam como um carregador. A plataforma Sherpa se mostra bastante universal, pode ser usada não apenas na pesquisa de avalanches.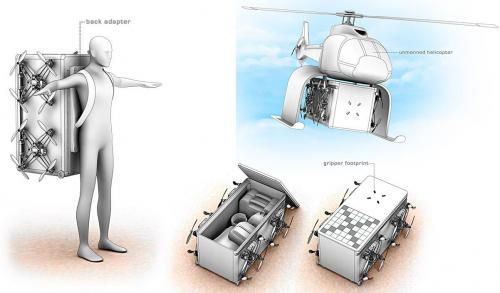
Inundar
Nesse caso, a tarefa dos robôs é procurar sobreviventes em um território muito grande e fornecê-los com os suprimentos necessários para a sobrevivência até a chegada dos socorristas. Uma solução é proposta pelo projeto da Carnegie Mellon University Cooperative Robotic Watercraft . Envolve o uso de pequenos grupos de pequenos robôs planadores que exploram conjuntamente os quadrados indicados, relatam os achados e entregam pequenas cargas.Os desenvolvedores criaram várias opções de design para robôs de plástico relativamente baratos, equipados com hélices. Para comunicação, eles usam telefones celulares comuns no Android, a orientação é realizada usando GPS. Os robôs também estão equipados com uma câmera, Arduino e sensores, incluindo um sistema de amostragem de água.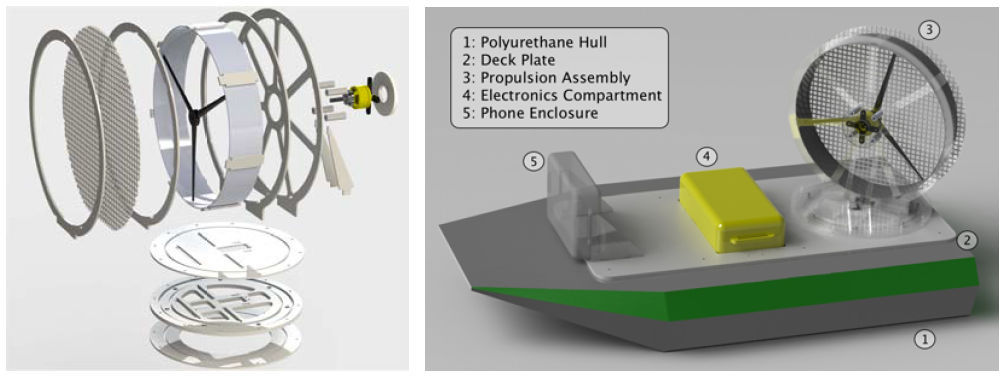
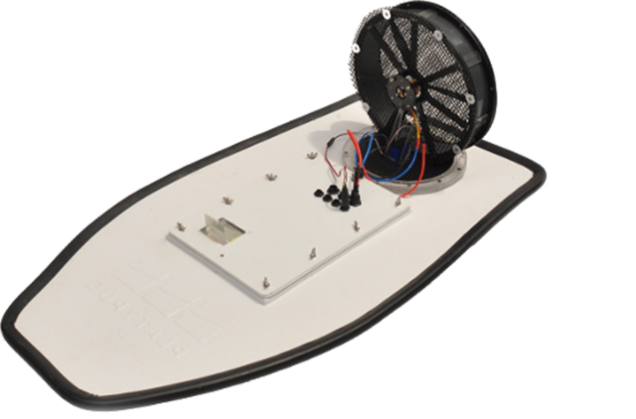 O comprimento mínimo do barco é de 0,6 m, mas o design permite dimensionar estruturas muito grandes com vários metros de comprimento, equipadas com equipamentos sérios, até sonar e espectrômetros de massa. Segundo os desenvolvedores, para uma pesquisa completa, um robô não deve ter mais de 16.000 m². m de superfície da água (1,6 ha). Naturalmente, aumentar o número de robôs por unidade de área acelera a pesquisa e melhora a eficiência.
O comprimento mínimo do barco é de 0,6 m, mas o design permite dimensionar estruturas muito grandes com vários metros de comprimento, equipadas com equipamentos sérios, até sonar e espectrômetros de massa. Segundo os desenvolvedores, para uma pesquisa completa, um robô não deve ter mais de 16.000 m². m de superfície da água (1,6 ha). Naturalmente, aumentar o número de robôs por unidade de área acelera a pesquisa e melhora a eficiência.Tremor de terra
A destruição do edifício não significa que não há ninguém para salvar nas ruínas. No entanto, aqui o fator tempo é muito importante. Para compilar um mapa de bloqueio e detectar possíveis pontos de penetração, os desenvolvedores da Universidade Ryerson equiparam o multicopter com uma câmera RGB-D capaz de não apenas registrar uma imagem, mas também determinar a distância dos objetos. Uma solução semelhante, em particular, foi usada no Microsoft Kinect. O sistema analisa imagens de duas câmeras (cor e profundidade) para detectar rachaduras, quedas, aberturas e furos através dos quais os sobreviventes podem ser pesquisados. Isso leva em consideração o tamanho dos furos, a profundidade e as condições ambientais.Acidentes envolvendo liberações tóxicas e radioativas
Esta é provavelmente a área mais desenvolvida em robótica de resgate: existem alguns modelos de robôs no mercado projetados para estudar escombros e locais perigosos para a saúde e a vida humana. Basicamente, são máquinas tão pequenas que podem ser usadas para procurar sobreviventes sob os escombros e monitorar as condições químicas e de radiação na área do acidente.E esse robô Parosha Cheetah, mais poderoso, pode ser usado para uma variedade de tarefas, desde observação e reparo até entrega de remédios, suprimentos e evacuação de pessoas, já que a capacidade de carga atinge 110 kg.

 Entre os desenvolvimentos "frescos", pode ser chamado o robô Octopus de 670 kg, equipado com oito manipuladores (com capacidade de carga de 180 kg) e usado na usina nuclear japonesa de Fukushima. Entre outras coisas, o robô pode ser equipado com um laser para cortar pedra e concreto, além de uma alça especial para trabalhar com substâncias radioativas. Em geral, o Octopus é um robô multiuso, também adequado para resgatar sobreviventes de terremotos, tsunamis e incêndios.
Entre os desenvolvimentos "frescos", pode ser chamado o robô Octopus de 670 kg, equipado com oito manipuladores (com capacidade de carga de 180 kg) e usado na usina nuclear japonesa de Fukushima. Entre outras coisas, o robô pode ser equipado com um laser para cortar pedra e concreto, além de uma alça especial para trabalhar com substâncias radioativas. Em geral, o Octopus é um robô multiuso, também adequado para resgatar sobreviventes de terremotos, tsunamis e incêndios.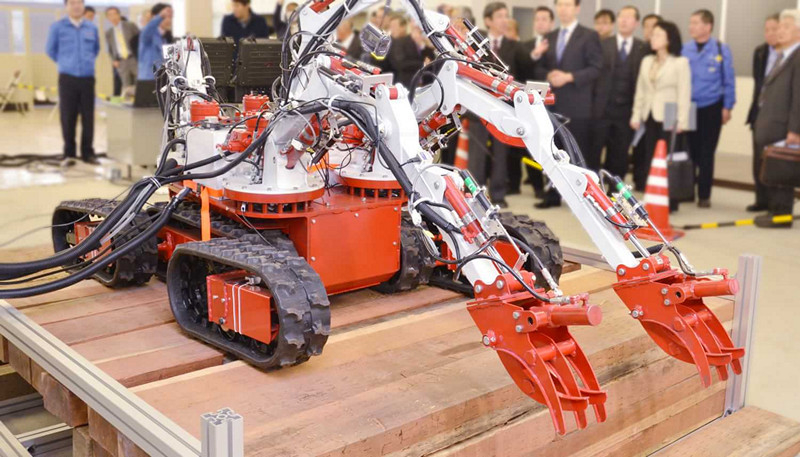 Outro problema que impede o uso generalizado de robôs em operações de resgate é a baixa confiabilidade de modelos feitos para uso "civil". Ao mesmo tempo, robôs de resgate militares ou especializados altamente confiáveis são muito caros. E poucas organizações decidem investir várias dezenas de milhares de dólares em um dispositivo que se torna obsoleto ou destruído em questão de anos.Portanto, ou o desenvolvimento da robótica de resgate seguirá o caminho da redução máxima de custos para absorver quantidade, não qualidade, ou teremos que esperar muito tempo pela robótica do Ministério de Emergências.
Outro problema que impede o uso generalizado de robôs em operações de resgate é a baixa confiabilidade de modelos feitos para uso "civil". Ao mesmo tempo, robôs de resgate militares ou especializados altamente confiáveis são muito caros. E poucas organizações decidem investir várias dezenas de milhares de dólares em um dispositivo que se torna obsoleto ou destruído em questão de anos.Portanto, ou o desenvolvimento da robótica de resgate seguirá o caminho da redução máxima de custos para absorver quantidade, não qualidade, ou teremos que esperar muito tempo pela robótica do Ministério de Emergências.Source: https://habr.com/ru/post/pt382073/
All Articles