Gato que alimenta o Arduino com instinto de caça
O engenheiro Ben Millam está cansado de alimentar seu gato chamado Monkey da maneira habitual, constantemente borrifando comida. Então, ele criou um sistema de alimentação alternativo no Arduino: muito mais divertido para o Macaco e para ele mesmo.Todo gato na alma é um caçador. Não é à toa que todos os dias eles seguem o mesmo caminho, explorando os cantos: um pequeno predador inspeciona seu território e procura presas. Para satisfazer as necessidades de caça do macaco, o engenheiro criou um "alimentador" tecnológico, que alimenta a alimentação somente se uma pequena bola for colocada dentro.O truque é que as bolas sempre em novos lugares onde o dono as esconde. Esta é a presa desejada: a gata se orgulha muito quando finalmente a encontra. O instinto de caça está satisfeito.Antes de iniciar o "alimentador" automático, Ben Millam recomenda primeiro treinar o gato. Em particular, o Macaco dele treinou primeiro com um simples "clicker" - ela precisou pressionar um botão para conseguir comida. No YouTube, você encontra muitos vídeos de treinamento sobre como treinar um gato para pressionar um botão.Depois disso, o gato precisa ser treinado gradualmente para caçar a bola, dividindo essa tarefa difícil em várias subtarefas simples. O gato olhou para a bola - o clicker dispara e dá comida (repetido até que a habilidade se torne estável). Além disso, o gato se aproximou da bola - o clicker dispara (novamente, o número de vezes necessário é repetido). As seguintes subtarefas: 3) o gato cheira a bola; 4) bate na bola; 5) bate na bola e a levanta; 6) bate na bola, levanta e a segura por alguns segundos.Durante o treinamento, cada ação é incentivada até que a habilidade se torne estável. Depois disso, a recompensa pára até que o gato execute a próxima ação na lista.Separadamente, o gato é treinado para se aproximar do local onde a bola é jogada.No final, você precisa combinar as duas direções do treinamento para que o gato e a bola se aproximem do local da descarga.Se o treinamento foi bem-sucedido, é hora de coletar um "alimentador" automático. É assim que o receptor de bola se parece. Ele dá o comando para alimentar.
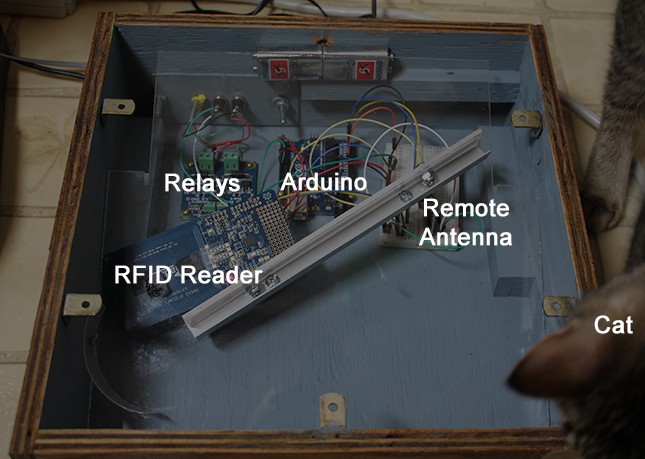 O autor instalou o controlador RFID Adafruit PN532 , que lê as etiquetas RFID das bolas e inicia o programa de alimentação do Arduino. O Arduino Uno alterna o relé, que fecha o circuito - e o "alimentador" do modelo Super Feed fornece uma porção de comida.Outros componentes utilizados: placa de relé de estado sólido com saída dupla ; Receptor RF M4 de 315 MHz para receber um sinal de um controle remoto; quatro botõescontrole remoto em 315 MHz; MiFare Classic Keyfob (13,56 MHz RFID / NFC)
O autor instalou o controlador RFID Adafruit PN532 , que lê as etiquetas RFID das bolas e inicia o programa de alimentação do Arduino. O Arduino Uno alterna o relé, que fecha o circuito - e o "alimentador" do modelo Super Feed fornece uma porção de comida.Outros componentes utilizados: placa de relé de estado sólido com saída dupla ; Receptor RF M4 de 315 MHz para receber um sinal de um controle remoto; quatro botõescontrole remoto em 315 MHz; MiFare Classic Keyfob (13,56 MHz RFID / NFC) Source: https://habr.com/ru/post/pt382855/
All Articles