Um astronauta da ISS controlará um veículo todo-o-terreno com manipuladores na Terra
 Andreas Mogensen, um cosmonauta europeu de homenagem, entregue no início do mês à ISS pelo foguete Soyuz, participará hoje do experimento exclusivo do Interact a bordo da estação . Ele controlará remotamente um robô todo-o-terreno com feedback.O veículo todo-o-terreno montará e manipulará manipuladores no hangar do centro técnico ESTEC (Centro Europeu de Pesquisa e Tecnologia Espacial). Este é o principal centro de desenvolvimento e testes de tecnologia na Holanda, de propriedade da ESA, Agência Espacial Européia.O teste do veículo todo-o-terreno será realizado em três etapas. Primeiro, o astronauta verificará a conexão com o robô em meia hora. Então ele começará a controlar seus movimentos e verificar a operação de manipuladores capazes de trabalhar com precisão submilimétrica. Na fase final, Mogensen tentará usar manipuladores para organizar pinos especiais nos furos preparados de uma pequena bancada.O experimento foi organizado pelo laboratório de controle remoto de robôs e hepáticos (Telerobotics & Haptics Lab), trabalhando no âmbito da ESTEC. Heptika é uma tecnologia para controlar robôs remotos equipados com sensores de feedback. Essas tecnologias permitem que o cirurgião opere remotamente o paciente, concentrando-se no retorno dos tecidos e, por exemplo, no astronauta da nave orbital para trabalhar com os manipuladores de um robô localizado na superfície do planeta.O veículo todo-o-terreno está equipado com manipuladores de alta precisão da empresa alemã KUKA . Seus robôs estão trabalhando em vários setores - montam carros, empilham paletes com produtos acabados, transferem espaços em branco de vidro, trabalham em siderúrgicas a altas temperaturas.Os manipuladores de veículos todo-o-terreno estão equipados com uma variedade de sensores de feedback - eles são capazes de manipular "suavemente" vários objetos frágeis, limitando a carga sobre eles, e se adaptando aos movimentos das mãos do operador.
Andreas Mogensen, um cosmonauta europeu de homenagem, entregue no início do mês à ISS pelo foguete Soyuz, participará hoje do experimento exclusivo do Interact a bordo da estação . Ele controlará remotamente um robô todo-o-terreno com feedback.O veículo todo-o-terreno montará e manipulará manipuladores no hangar do centro técnico ESTEC (Centro Europeu de Pesquisa e Tecnologia Espacial). Este é o principal centro de desenvolvimento e testes de tecnologia na Holanda, de propriedade da ESA, Agência Espacial Européia.O teste do veículo todo-o-terreno será realizado em três etapas. Primeiro, o astronauta verificará a conexão com o robô em meia hora. Então ele começará a controlar seus movimentos e verificar a operação de manipuladores capazes de trabalhar com precisão submilimétrica. Na fase final, Mogensen tentará usar manipuladores para organizar pinos especiais nos furos preparados de uma pequena bancada.O experimento foi organizado pelo laboratório de controle remoto de robôs e hepáticos (Telerobotics & Haptics Lab), trabalhando no âmbito da ESTEC. Heptika é uma tecnologia para controlar robôs remotos equipados com sensores de feedback. Essas tecnologias permitem que o cirurgião opere remotamente o paciente, concentrando-se no retorno dos tecidos e, por exemplo, no astronauta da nave orbital para trabalhar com os manipuladores de um robô localizado na superfície do planeta.O veículo todo-o-terreno está equipado com manipuladores de alta precisão da empresa alemã KUKA . Seus robôs estão trabalhando em vários setores - montam carros, empilham paletes com produtos acabados, transferem espaços em branco de vidro, trabalham em siderúrgicas a altas temperaturas.Os manipuladores de veículos todo-o-terreno estão equipados com uma variedade de sensores de feedback - eles são capazes de manipular "suavemente" vários objetos frágeis, limitando a carga sobre eles, e se adaptando aos movimentos das mãos do operador.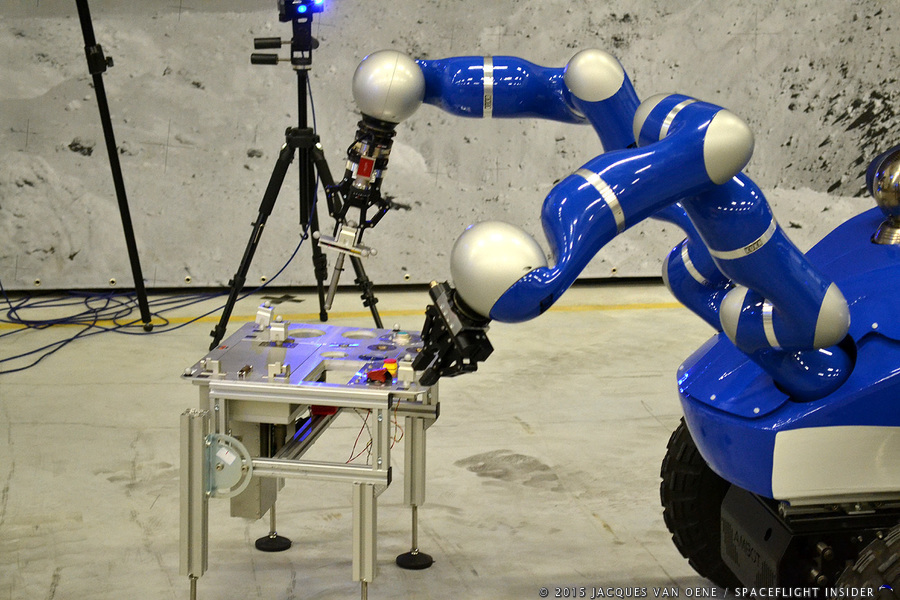 Além disso, o veículo todo-o-terreno possui quatro câmeras. A câmera principal na parte superior permite navegar no espaço, a câmera em um dos manipuladores fornece um trabalho preciso com objetos, e as câmeras frontal e traseira aumentam a segurança ao mover um veículo todo-o-terreno.O trabalho remoto não é apenas testado com o veículo todo-o-terreno - isso pode ser feito em uma sala vizinha. É precisamente o controle do robô a partir da órbita que é verificado para encontrar possíveis dificuldades imprevistas associadas a esta operação. Além disso, neste caso, o sinal terá que seguir um caminho difícil. Ele viajará da ISS através do sistema de satélite TDRSS da NASA (Sistema de Satélite para Rastreamento e Transmissão de Dados), depois alcançará estações terrestres nos EUA, atravessará o Atlântico e chegará à Holanda. No total, o comprimento do caminho do sinal pode ser 90.000 km, como resultado dos quais ocorrerão atrasos na comunicação de até 1 segundo.A sonda Soyuz TMA-18M foi lançada com sucessoNa manhã de 2 de setembro, usando o veículo de lançamento Soyuz-FG do Baikonur Cosmodrome. A bordo estavam o dinamarquês Andreas Mogensen, o cazaquistão Aydin Aimbetov e o comandante da tripulação russa Sergei Volkov. A sonda se aproximou da Estação Espacial Internacional por dois dias, desviou com sucesso o foguete japonês dos destroços e atracou à ISS em 4 de setembro.
Além disso, o veículo todo-o-terreno possui quatro câmeras. A câmera principal na parte superior permite navegar no espaço, a câmera em um dos manipuladores fornece um trabalho preciso com objetos, e as câmeras frontal e traseira aumentam a segurança ao mover um veículo todo-o-terreno.O trabalho remoto não é apenas testado com o veículo todo-o-terreno - isso pode ser feito em uma sala vizinha. É precisamente o controle do robô a partir da órbita que é verificado para encontrar possíveis dificuldades imprevistas associadas a esta operação. Além disso, neste caso, o sinal terá que seguir um caminho difícil. Ele viajará da ISS através do sistema de satélite TDRSS da NASA (Sistema de Satélite para Rastreamento e Transmissão de Dados), depois alcançará estações terrestres nos EUA, atravessará o Atlântico e chegará à Holanda. No total, o comprimento do caminho do sinal pode ser 90.000 km, como resultado dos quais ocorrerão atrasos na comunicação de até 1 segundo.A sonda Soyuz TMA-18M foi lançada com sucessoNa manhã de 2 de setembro, usando o veículo de lançamento Soyuz-FG do Baikonur Cosmodrome. A bordo estavam o dinamarquês Andreas Mogensen, o cazaquistão Aydin Aimbetov e o comandante da tripulação russa Sergei Volkov. A sonda se aproximou da Estação Espacial Internacional por dois dias, desviou com sucesso o foguete japonês dos destroços e atracou à ISS em 4 de setembro.Source: https://habr.com/ru/post/pt383841/
All Articles