Pesquisador aprendeu a enganar a navegação a laser da Robomobiles
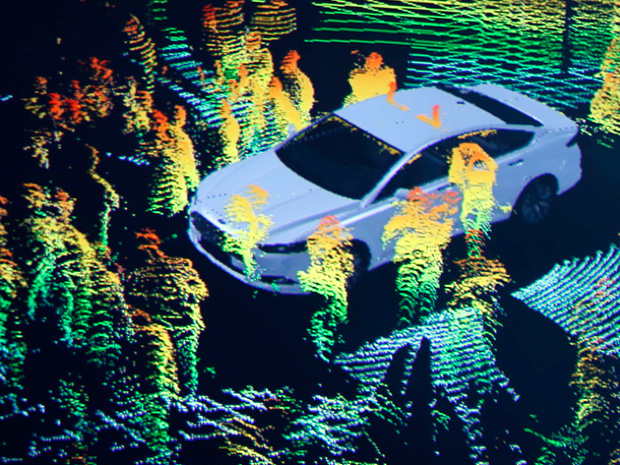 Um especialista da Security Innovation, uma empresa de segurança de software, apontou falhas no sistema de orientação a laser LiDAR usado por alguns desenvolvedores de carros-robôs. Ao criar um dispositivo simples a partir de um ponteiro e um computador Raspberry Pi de placa única, você pode enganar facilmente o sensor de um carro.Jonathan Petit, pesquisador da empresa, argumenta que, com este kit, é possível recriar o eco de sinais de um carro inexistente e "colocá-lo em qualquer lugar" - ou seja, fazer com que o sistema de navegação de um robomóvel "veja" um obstáculo inexistente. Com isso, você pode fazer a manobra do robomóvel, parar ou parar, porque o computador assume que ele está cercado por objetos que não existem na realidade.Alguns desenvolvedores de robomobile estão tentando usar radares de curto alcance em seu design, mas trabalhar em frequências de rádio requer licenciamento. Usar um telêmetro a laser é muito simples - ele envia pulsos e estuda a luz refletida.Petit fez um trabalho científico descrevendo a estrutura e o esquema de seu trabalho durante seus estudos na Universidade Nacional Irlandesa em Cork. Ele será apresentado na conferência de segurança internacional da Black Hat Europe em novembro. Petit ficou interessado em pesquisas sobre a segurança de veículos robóticos e quase imediatamente chegou à conclusão de que seu ponto mais vulnerável era um sistema de navegação a laser."Este é o ponto chave - o lugar em que toda a entrada entra", diz ele. Se o robomóvel tiver uma entrada ruim, ele tomará más decisões enquanto estiver dirigindo. A parte mais difícil de enganar seu sistema de navegação é o tempo preciso. É necessário enviar feixes de resposta falsos quando o sistema estiver aguardando sua chegada ".Petit registrou os pulsos emitidos pelo laser, analisou-os e escreveu um programa enviando pulsos de resposta falsa. Como resultado, o pesquisador conseguiu criar um sistema que simula com sucesso a presença de um objeto a uma distância de 20 a 350 metros do robomóvel. Pode até imitar a presença de vários objetos, incluindo objetos em movimento. Para atacar, você deve estar a 100 metros de cada lado do sensor a laser e nem é necessário poder direcionar com precisão o feixe de laser para ele.Os carros modernos estão repletos de tecnologias projetadas para simplificar a vida do motorista, mas ao mesmo tempo, têm suas próprias vulnerabilidades. Recentemente, um par de hackers demonstrou interceptação de controle remotoSistemas automotivos Jeep Cherokee equipados com o sistema FCA Uconnect (Internet no carro).Os cingapurianos estão desenvolvendo um sistema de táxis autônomos, semelhante aos carros para dirigir em campos de golfeSegundo Petit, é impossível começar a pensar sobre a segurança da tecnologia cedo demais. E sempre há a oportunidade de aumentar a segurança - por exemplo, um bom sistema deve ter uma maneira de comparar os dados recebidos do laser com os de outros sensores e eliminar as inconsistências que surgem. E os desenvolvedores de robomobiles já devem começar a pensar nessa direção - porque em suas mãos não está apenas a segurança de um determinado sistema de computador, mas a vida e a saúde humanas.
Um especialista da Security Innovation, uma empresa de segurança de software, apontou falhas no sistema de orientação a laser LiDAR usado por alguns desenvolvedores de carros-robôs. Ao criar um dispositivo simples a partir de um ponteiro e um computador Raspberry Pi de placa única, você pode enganar facilmente o sensor de um carro.Jonathan Petit, pesquisador da empresa, argumenta que, com este kit, é possível recriar o eco de sinais de um carro inexistente e "colocá-lo em qualquer lugar" - ou seja, fazer com que o sistema de navegação de um robomóvel "veja" um obstáculo inexistente. Com isso, você pode fazer a manobra do robomóvel, parar ou parar, porque o computador assume que ele está cercado por objetos que não existem na realidade.Alguns desenvolvedores de robomobile estão tentando usar radares de curto alcance em seu design, mas trabalhar em frequências de rádio requer licenciamento. Usar um telêmetro a laser é muito simples - ele envia pulsos e estuda a luz refletida.Petit fez um trabalho científico descrevendo a estrutura e o esquema de seu trabalho durante seus estudos na Universidade Nacional Irlandesa em Cork. Ele será apresentado na conferência de segurança internacional da Black Hat Europe em novembro. Petit ficou interessado em pesquisas sobre a segurança de veículos robóticos e quase imediatamente chegou à conclusão de que seu ponto mais vulnerável era um sistema de navegação a laser."Este é o ponto chave - o lugar em que toda a entrada entra", diz ele. Se o robomóvel tiver uma entrada ruim, ele tomará más decisões enquanto estiver dirigindo. A parte mais difícil de enganar seu sistema de navegação é o tempo preciso. É necessário enviar feixes de resposta falsos quando o sistema estiver aguardando sua chegada ".Petit registrou os pulsos emitidos pelo laser, analisou-os e escreveu um programa enviando pulsos de resposta falsa. Como resultado, o pesquisador conseguiu criar um sistema que simula com sucesso a presença de um objeto a uma distância de 20 a 350 metros do robomóvel. Pode até imitar a presença de vários objetos, incluindo objetos em movimento. Para atacar, você deve estar a 100 metros de cada lado do sensor a laser e nem é necessário poder direcionar com precisão o feixe de laser para ele.Os carros modernos estão repletos de tecnologias projetadas para simplificar a vida do motorista, mas ao mesmo tempo, têm suas próprias vulnerabilidades. Recentemente, um par de hackers demonstrou interceptação de controle remotoSistemas automotivos Jeep Cherokee equipados com o sistema FCA Uconnect (Internet no carro).Os cingapurianos estão desenvolvendo um sistema de táxis autônomos, semelhante aos carros para dirigir em campos de golfeSegundo Petit, é impossível começar a pensar sobre a segurança da tecnologia cedo demais. E sempre há a oportunidade de aumentar a segurança - por exemplo, um bom sistema deve ter uma maneira de comparar os dados recebidos do laser com os de outros sensores e eliminar as inconsistências que surgem. E os desenvolvedores de robomobiles já devem começar a pensar nessa direção - porque em suas mãos não está apenas a segurança de um determinado sistema de computador, mas a vida e a saúde humanas.Source: https://habr.com/ru/post/pt383945/
All Articles