Quadcopters - como tudo começou?
Um moderno helicóptero quadro (hexa, octo) é um dispositivo de “computação” bastante poderoso que pode ser controlado a partir de um smartphone via WiFi, travar em um ponto, voar ao longo de uma rota etc. Qualquer pessoa pode comprar esse dispositivo agora. Como tudo começou?Como um quadrocopter voa?
Para entender a essência das soluções técnicas, entenderemos um pouco como um quadrocopter voa. De fato, um quadrocóptero é um sistema instável. Se você pegar 4 motores e apenas conectá-los à bateria, o quadrocopter não voará para lugar nenhum, ele simplesmente rolará. o poder de tração dos motores nunca será idêntico. E então a eletrônica entra em vigor. A bordo do quadrocóptero, há um "painel de controle" central, cuja parte principal é a unidade do sensor. No caso mais simples, este é um giroscópio de três eixos. O microcontrolador lê constantemente dados dos giroscópios e, assim que o giroscópio "detecta" a inclinação ao longo de qualquer eixo, o controlador instrui o motor correspondente a aumentar ou diminuir ligeiramente a velocidade, a fim de compensar a inclinação. Em geral, toda a lógica - com exceção de um monte de tudo (controladores PID, teoria de controle, filtros Kalman),não há nada complicado (uma piada). Bem, para o usuário, tudo é realmente transparente. Não há partes móveis, exceto os motores no quadrocóptero, todo o controle é realizado exclusivamente alterando a rotação das rotações do motor (com as rotações da mesma forma - alteramos a velocidade de rotação, obtemos um torque). Agora, de volta à história.Cuidado, trânsito.Mikrokopter
A lendária empresa alemã, graças aos engenheiros dos quais em 2006 o primeiro dispositivo apareceu. O controlador tinha um processador Atmega644 a bordo com 4K de memória e uma frequência de até 20 MHz, 3 giroscópios em cada eixo, um acelerômetro (para vôo horizontal) e um barômetro para manter a altitude (a precisão do barômetro MPX4115A é de cerca de 1 m). Mais tarde, apareceram módulos adicionais, por exemplo, GPS para manter uma posição.Agora você pode encontrar um vídeo no youtube sobre como tudo aconteceu (2007).Em geral, o sistema teve muito sucesso. Seus produtos nunca foram baratos, o preço começou em torno de 1500 euros. A empresa existe agora, eles produzem dispositivos profissionais, a categoria de preço correspondente. E outro ponto importante - inicialmente, os criadores do Microcopter tornaram o código fonte aberto. É claro que, no futuro próximo, vários clones começaram a aparecer (incluindo aqueles feitos na Federação Russa), isso obviamente afetou negativamente as vendas e, em seguida, o código foi fechado. Mas ainda assim, acho que isso serviu como um grande impulso para a criação de um tipo diferente de multicóptero.O MikroKopter não era popular por causa do preço e não havia muitos proprietários. No entanto, um impulso foi dado à comunidade mundial e vários sistemas começaram a aparecer.Kaptainkuk
Um dos sistemas mais simples produzidos (em várias versões) de 2010 até o presente. A placa de controle possui apenas 3 giroscópios, resistores variáveis comuns são usados para ajustar os parâmetros.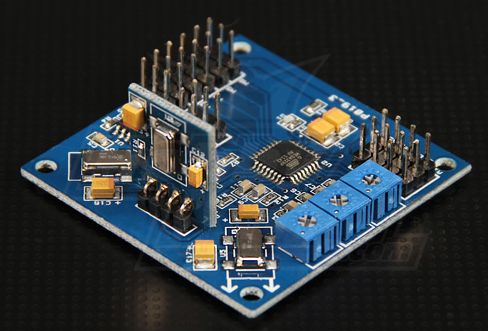 (Foto de Hobbyking.com)Essa placa agora custa apenas US $ 15, como você pode ver a bordo, além de giroscópios e um processador fraco, em geral, não há nada. O firmware no código fonte do KK está disponível gratuitamente na Internet; quem desejar pode baixá-lo digitando o nome do arquivo “kk2_1V1.zip” na pesquisa do Google (o tamanho é de apenas 90 KB). Esta é provavelmente a primeira e mais recente versão do firmware de um helicóptero, escrita em assembler.
(Foto de Hobbyking.com)Essa placa agora custa apenas US $ 15, como você pode ver a bordo, além de giroscópios e um processador fraco, em geral, não há nada. O firmware no código fonte do KK está disponível gratuitamente na Internet; quem desejar pode baixá-lo digitando o nome do arquivo “kk2_1V1.zip” na pesquisa do Google (o tamanho é de apenas 90 KB). Esta é provavelmente a primeira e mais recente versão do firmware de um helicóptero, escrita em assembler.Multiwii
O próximo marco no desenvolvimento de helicópteros foi o sistema MultiWii. O nome veio do jogador Nintendo Wii e Wii Nunchuk, que os artesãos desmontaram, e serraram uma placa com sensores de lá. O Arduino Nano foi usado como processador central.A aparência do quadro acabou sendo algo como isto (foto do site rcgroups, 2010):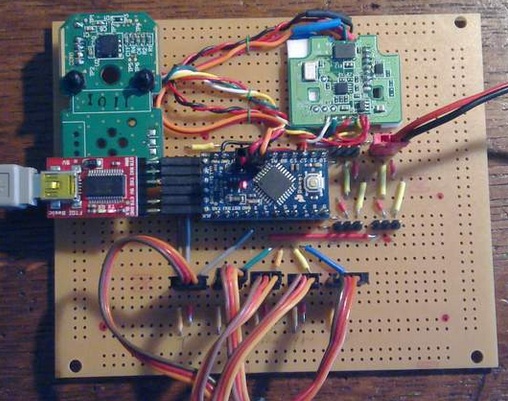 No entanto, em alguns anos o sistema evoluiu e as últimas placas (agora vendidas, o preço é de US $ 20 a 30) se parecem com isso:
No entanto, em alguns anos o sistema evoluiu e as últimas placas (agora vendidas, o preço é de US $ 20 a 30) se parecem com isso: (foto do site Hobbyking.com)As versões mais recentes do MultiWii possuem sensores muito bons, eles podem travar em um ponto no GPS, manter a altitude e voltar para casa. Porque O Multiwii foi escrito para o Arduino, todas as placas permaneceram compatíveis com o Arduino, o código-fonte pode ser baixado no Github. Uma das desvantagens do MultiWii é seu processador fraco, que limita as capacidades computacionais dos algoritmos; clones posteriores no STM32 começaram a aparecer, mas não causaram o clima, pois em termos de hardware, qualquer quadrocopter é bastante simples, 95% da complexidade está precisamente no código. Ao mesmo tempo, tenho certeza de que são as fontes do MultiWii que se tornaram a base de todos os sistemas comerciais de hoje.
(foto do site Hobbyking.com)As versões mais recentes do MultiWii possuem sensores muito bons, eles podem travar em um ponto no GPS, manter a altitude e voltar para casa. Porque O Multiwii foi escrito para o Arduino, todas as placas permaneceram compatíveis com o Arduino, o código-fonte pode ser baixado no Github. Uma das desvantagens do MultiWii é seu processador fraco, que limita as capacidades computacionais dos algoritmos; clones posteriores no STM32 começaram a aparecer, mas não causaram o clima, pois em termos de hardware, qualquer quadrocopter é bastante simples, 95% da complexidade está precisamente no código. Ao mesmo tempo, tenho certeza de que são as fontes do MultiWii que se tornaram a base de todos os sistemas comerciais de hoje.Arducopter
Outro sistema baseado em Arduino foi o mais longe. Agora, é um sistema com a possibilidade de vôo ponto a ponto programável, suporte para modems de rádio e transmissão de telemetria, armazenamento de vários registros etc.O software deles é mais ou menos assim: as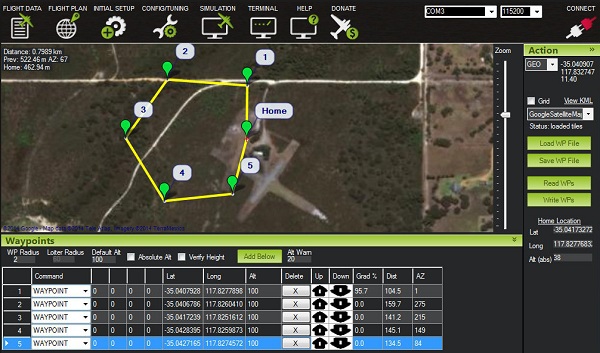 placas evoluíram a partir delas:
placas evoluíram a partir delas: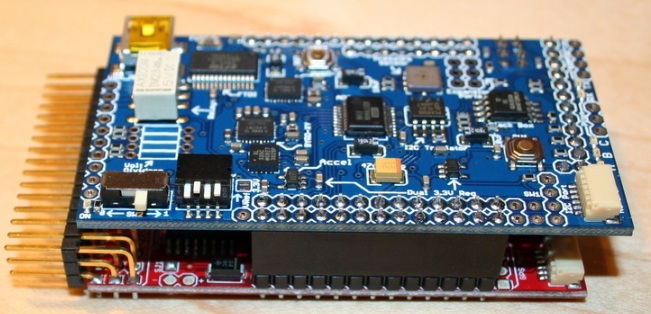 para essas
para essas placas são vendidas agora, o preço é de US $ 50 US $ 250 para as versões originais. Os códigos-fonte do Ardupilot também estão disponíveis no github e, a julgar pelo número de confirmações, o projeto está em desenvolvimento ativo. Esse sistema não possui recursos inferiores aos dispositivos profissionais; a qualidade do voo pode ser vista no vídeo:Tudo é legal aqui, exceto por um "mas" - é Open Source, com todas as conseqüências resultantes. O sistema é aberto, finalizado por entusiastas, e ninguém garante nada, incluindo a ausência de erros no software. Se o quadrocopter cair no BMW de outra pessoa, não haverá ninguém para reclamar.
placas são vendidas agora, o preço é de US $ 50 US $ 250 para as versões originais. Os códigos-fonte do Ardupilot também estão disponíveis no github e, a julgar pelo número de confirmações, o projeto está em desenvolvimento ativo. Esse sistema não possui recursos inferiores aos dispositivos profissionais; a qualidade do voo pode ser vista no vídeo:Tudo é legal aqui, exceto por um "mas" - é Open Source, com todas as conseqüências resultantes. O sistema é aberto, finalizado por entusiastas, e ninguém garante nada, incluindo a ausência de erros no software. Se o quadrocopter cair no BMW de outra pessoa, não haverá ninguém para reclamar.Cardan sem escova
Paralelamente aos quadrocópteros, outra tecnologia muito interessante foi desenvolvida - o cardan sem escova para câmera de foto / vídeo. Esta é uma placa separada com seus sensores, que mantém a câmera na posição desejada devido a dois motores, compensando as voltas nos eixos correspondentes. Eles foram desenvolvidos pelo nosso compatriota, como funciona a suspensão, e podem ser vistos no vídeo (2013º ano).Pode-se ver que o helicóptero está balançando, mas o eixo da câmera não.Agora, não é surpresa para ninguém e foi um verdadeiro avanço na qualidade da gravação de vídeo.Sistemas comerciais
Escrever sobre eles não é tão interessante, porque o princípio aqui é simples: "pague e voe". O primeiro foi o mencionado MicroKopter, a próxima (e não muito bem-sucedida) foi o XAircraft, os dispositivos Gaui eram populares no setor de orçamento (este foi o primeiro dispositivo com preço de cerca de US $ 400 para um helicóptero pronto). E, finalmente, a empresa de maior sucesso é a DJI, sobre a qual apenas os preguiçosos não escreveram, por isso não faz sentido repetir aqui. Eles entraram no mercado com controladores DJI Naza (a um preço de US $ 200-400, com a possibilidade de manter uma posição, voltando para casa), havia uma série profissional separada da DJI Wookong (a um preço de cerca de US $ 1.000 e maior estabilidade de vôo). Finalmente, a DJI entrou no mercado de dispositivos prontos para o voo (RTF, Ready To Fly), bem, todo mundo já sabe sobre eles.E os vídeos mais recentes.O primeiro orçamento quadrocopter Gaui 330. Preço de emissão de US $ 400, 2010, sem funções adicionais.Dji Naza v2, o preço de emissão é o mesmo US $ 400, a capacidade de manter uma posição, voltar para casa, voar de ambos os lados para o piloto (modo despreocupado).Dji Phantom 3 - com cardan de câmera embutido, controles de smartphone e outros brindes.Por enquanto, isso é tudo, desculpe o grande número de vídeos, mas sem eles nada, caso contrário, seria desinteressante. Vamos ver o que acontece a seguir, depois de 5 anos ... Source: https://habr.com/ru/post/pt384163/
All Articles