Analisador eletrônico da figura oito e oval de uma roda de bicicleta
Se você anda de bicicleta, às vezes precisa repará-las. Um dos defeitos que você deve enfrentar é o oito da roda, ou oval.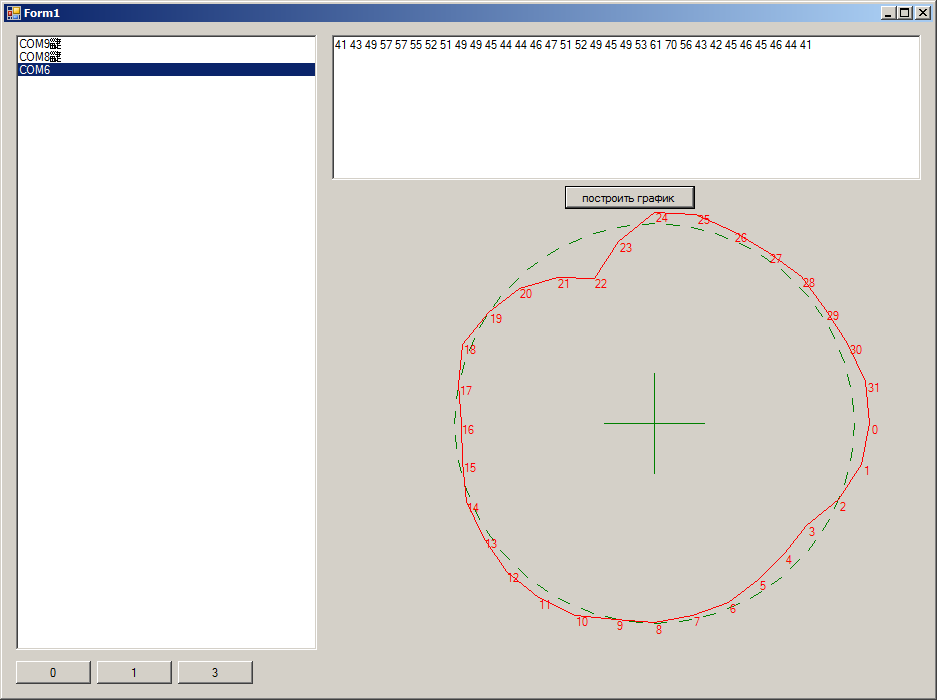 KPDV - os primeiros resultados da medição da ovalidade de uma rodaPor um longo tempo, não consegui resolver o problema da minha roda, então tive que montar um sistema de medição eletrônico.Primeiro, uma pequena explicação, qual é a figura oito e oval da roda?Oito - desvio do aro da roda para o lado, como um resultado do qual a roda abana ao dirigir:
KPDV - os primeiros resultados da medição da ovalidade de uma rodaPor um longo tempo, não consegui resolver o problema da minha roda, então tive que montar um sistema de medição eletrônico.Primeiro, uma pequena explicação, qual é a figura oito e oval da roda?Oito - desvio do aro da roda para o lado, como um resultado do qual a roda abana ao dirigir: oval (ou ovo) - quando o rebordo não é a uma distância igual do eixo da roda, como um resultado de que os saltos de roda:
oval (ou ovo) - quando o rebordo não é a uma distância igual do eixo da roda, como um resultado de que os saltos de roda: E a protuberância e poço de chumbo para a forma oval da roda.No caso simples, não é difícil corrigir a roda com a ajuda de uma chave de raio e um olhar atento. Mas eu tive um caso mais complicado - tendo caído em um obstáculo na estrada, dobrei muito o aro e o endireitei manualmente, não funcionou sem ajuda adicional, então surgiu a ideia de montar um dispositivo que possa medir desvios da norma.O primeiro problema que surgiu na minha frente foi a escolha de um elemento sensível. Ou seja, como transformar a rugosidade da roda em um sinal digital correspondente ao desvio? Muitas das opções disponíveis foram descartadas: o detector de distância do som é sensível à topografia da superfície e você precisa medir pela borda estreita da borda, o detector de distância no diodo IR e no receptor IR me causou medo pelas mesmas razões (mas existe a possibilidade de que ele possa ser usado e eles).Depois de pensar um pouco, lembrei-me do princípio de operação de um microscópio de varredura - a sonda se move ao longo da superfície da amostra e a deflexão da sonda e o alívio são medidos. Gostei da ideia e o esquema mais simples foi rapidamente montado:
E a protuberância e poço de chumbo para a forma oval da roda.No caso simples, não é difícil corrigir a roda com a ajuda de uma chave de raio e um olhar atento. Mas eu tive um caso mais complicado - tendo caído em um obstáculo na estrada, dobrei muito o aro e o endireitei manualmente, não funcionou sem ajuda adicional, então surgiu a ideia de montar um dispositivo que possa medir desvios da norma.O primeiro problema que surgiu na minha frente foi a escolha de um elemento sensível. Ou seja, como transformar a rugosidade da roda em um sinal digital correspondente ao desvio? Muitas das opções disponíveis foram descartadas: o detector de distância do som é sensível à topografia da superfície e você precisa medir pela borda estreita da borda, o detector de distância no diodo IR e no receptor IR me causou medo pelas mesmas razões (mas existe a possibilidade de que ele possa ser usado e eles).Depois de pensar um pouco, lembrei-me do princípio de operação de um microscópio de varredura - a sonda se move ao longo da superfície da amostra e a deflexão da sonda e o alívio são medidos. Gostei da ideia e o esquema mais simples foi rapidamente montado: : ( , ), , , , , LN2003, ,O algoritmo de medição é o mais simples: um motor de passo começa a aproximar o botão do aro, assim que o botão é pressionado, o passo retorna à sua posição inicial, o número de passos é transferido para o computador, essa ação é repetida para cada raio. A precisão acabou sendo suficiente - 10 ou mais etapas por 1 mm, ou seja, em princípio, você pode ajustar a roda com uma precisão de 0,1 mm. Um programa simples transforma os dados enviados pelo arduino em um cronograma compreensível, onde você pode ver quais raios girar para corrigir problemas.Depois de ajustar totalmente o volante, a imagem melhorou notavelmente:
: ( , ), , , , , LN2003, ,O algoritmo de medição é o mais simples: um motor de passo começa a aproximar o botão do aro, assim que o botão é pressionado, o passo retorna à sua posição inicial, o número de passos é transferido para o computador, essa ação é repetida para cada raio. A precisão acabou sendo suficiente - 10 ou mais etapas por 1 mm, ou seja, em princípio, você pode ajustar a roda com uma precisão de 0,1 mm. Um programa simples transforma os dados enviados pelo arduino em um cronograma compreensível, onde você pode ver quais raios girar para corrigir problemas.Depois de ajustar totalmente o volante, a imagem melhorou notavelmente: O problema desapareceu - o volante parou de bater ao dirigir. Mas não foi possível consertar completamente o poço, houve um entalhe significativo no aro após o acidente, é visível no gráfico acima:
O problema desapareceu - o volante parou de bater ao dirigir. Mas não foi possível consertar completamente o poço, houve um entalhe significativo no aro após o acidente, é visível no gráfico acima: O desvio real do aro no ponto de indentação é menor que um milímetro. Fontes doclienteFontes do Arduino
O desvio real do aro no ponto de indentação é menor que um milímetro. Fontes doclienteFontes do Arduino Source: https://habr.com/ru/post/pt384385/
All Articles