 Este ano, participamos do campeonato de lançamento da sonda climática CanSat e estabelecemos uma meta ambiciosa: transformar a sonda em um UAV completo, mantendo-se dentro das regras da competição
Este ano, participamos do campeonato de lançamento da sonda climática CanSat e estabelecemos uma meta ambiciosa: transformar a sonda em um UAV completo, mantendo-se dentro das regras da competiçãoEsta publicação inclui:
1) descrição do dispositivo2) finalidade de sua criação3) processo de montagem4) testes de vôo5) lançamento finalDescrição
O dispositivo é um quadrocóptero com dois modos: em passivo, assume a forma de um cilindro, que é colocado no corpo do foguete, nos raios ativos são abertos, os motores são iniciados, a principal missão começa, que consiste em coletar dados sobre o estado da superfície e atmosfera da Terra, vôo autônomo de acordo com definir pontos (com a capacidade de interceptar o controle do piloto) e retornar à base.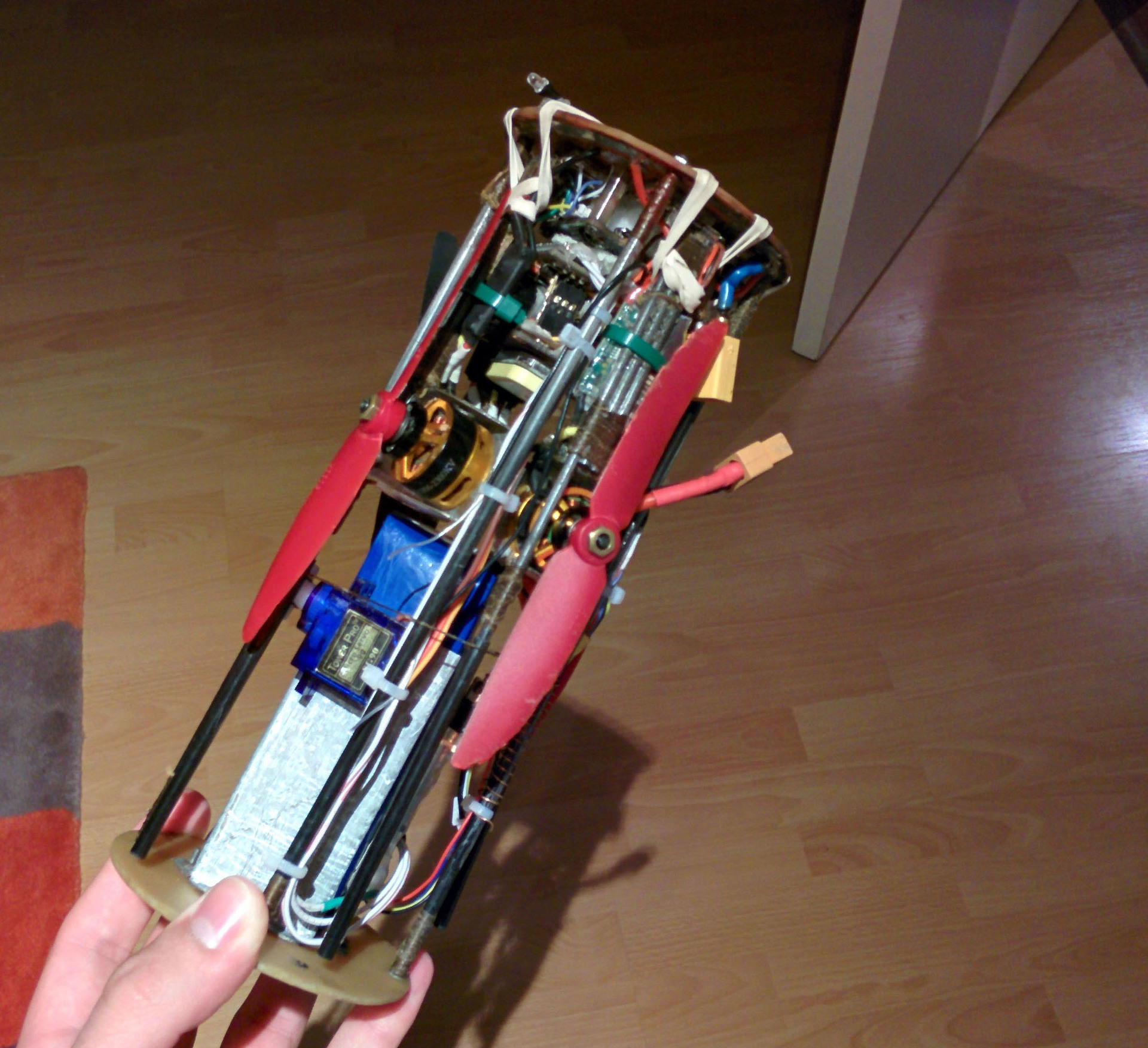 Estado dobrado
Estado dobradoCaracterísticas:
Tempo de vôo: 6-12 minutosFaixa de vôo horizontal: 4 kmFaixa de vôo vertical: 2 kmTempo de transição no modo ativo: 3 segundosPeso: 600 gSensores instalados: barômetro, acelerômetro, giroscópio, magnetômetro, GPS, câmera infravermelhaO projeto foi criado participar da liga principal do campeonato CanSat, realizado pelo SINP MSU.O que é o Kansat, . («»), , .
— , 1-4 , , . .
, , . , , . .
3 :
— 0.5 , 350 , , , , ATmega 128, RXQ2 (433 ). 500.
— , . : 200, . 1 .
— (30 ) .
Minha equipe teve experiência em participar do campeonato: no ano passado estávamos na liga regular. Em vez de um designer pronto, decidiu-se criar o seu, preservando os principais componentes do conjunto básico, para que as regras não fossem realmente violadas, mas notificamos os organizadores. Conseguimos reduzir o tamanho da placa em três vezes devido ao uso de impressão em frente e verso, para que teoricamente pudéssemos participar do campeonato americano, mas devido à produção doméstica, a placa trabalhou com algumas interrupções, o que não nos permitiu lançar em um foguete.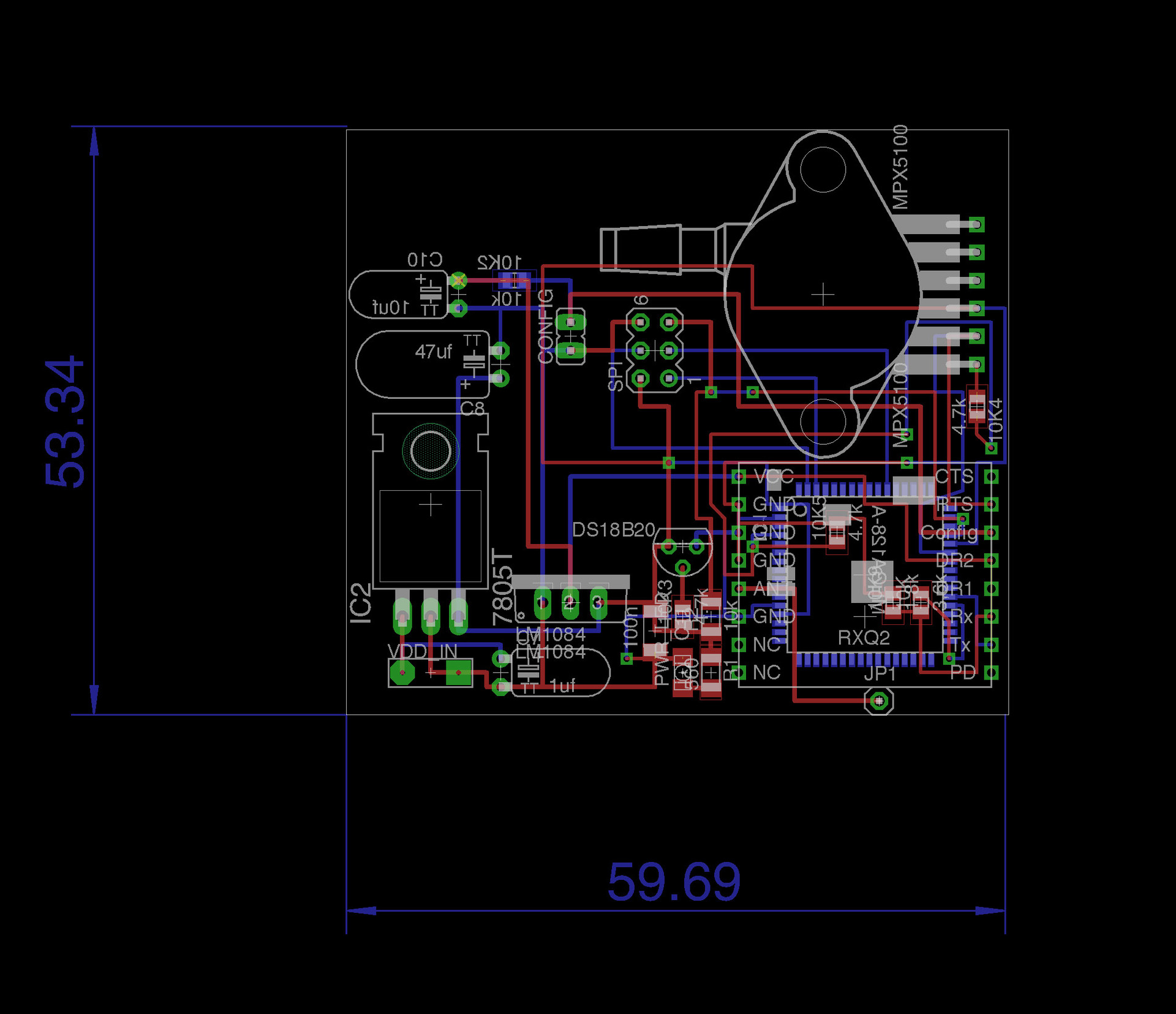 Placa de circuito principalNossa missão adicional era fotografar a Terra na faixa de infravermelho com uma câmera de 16x4 pixels e a faixa visível com mais sobreposições. Como a prática demonstrou, o projeto foi inútil, de uma maneira ou de outra, uma vez que a sonda oscilava constantemente devido à queda de pára-quedas, havia uma falta de velocidade de abertura e velocidade de gravação, portanto todos os vídeos estavam embaçados.
Placa de circuito principalNossa missão adicional era fotografar a Terra na faixa de infravermelho com uma câmera de 16x4 pixels e a faixa visível com mais sobreposições. Como a prática demonstrou, o projeto foi inútil, de uma maneira ou de outra, uma vez que a sonda oscilava constantemente devido à queda de pára-quedas, havia uma falta de velocidade de abertura e velocidade de gravação, portanto todos os vídeos estavam embaçados.exemplo de um vídeo
( 0:35)
. 2-
Mais detalhes sobre como todos nós quebramos1) - , .
2) , - , . , .
3) 18 / .
4) , , .
, 4 , .
Também vale mencionar a equipe mais velha, que participou de um campeonato ainda mais cedo. No ano passado, eles participaram da liga principal. A principal característica é o uso de um impulsor em vez de um paraquedas, mas devido à indisponibilidade do código do programa e de uma placa improvisada, eles também não puderam executar.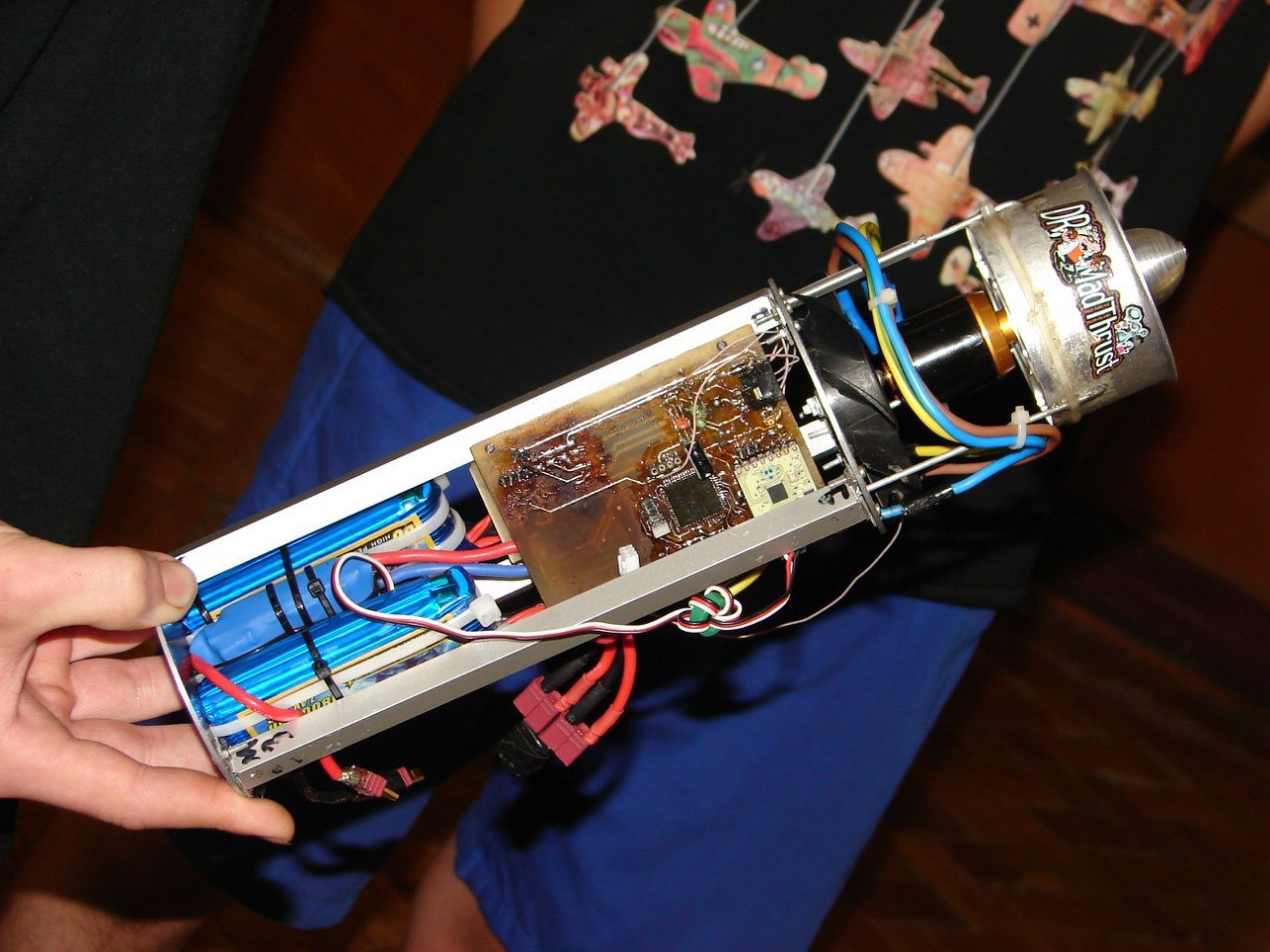 sonda do impulsor
sonda do impulsorA história deles
, , . , GPS GSM .
. , .
, , .
Este ano foi decidido fundir a equipe. Como resultado, minha equipe decidiu desenvolver a idéia de uma descida controlada, ou seja, criar um quadrocóptero que caberia em um foguete.Processo de criação
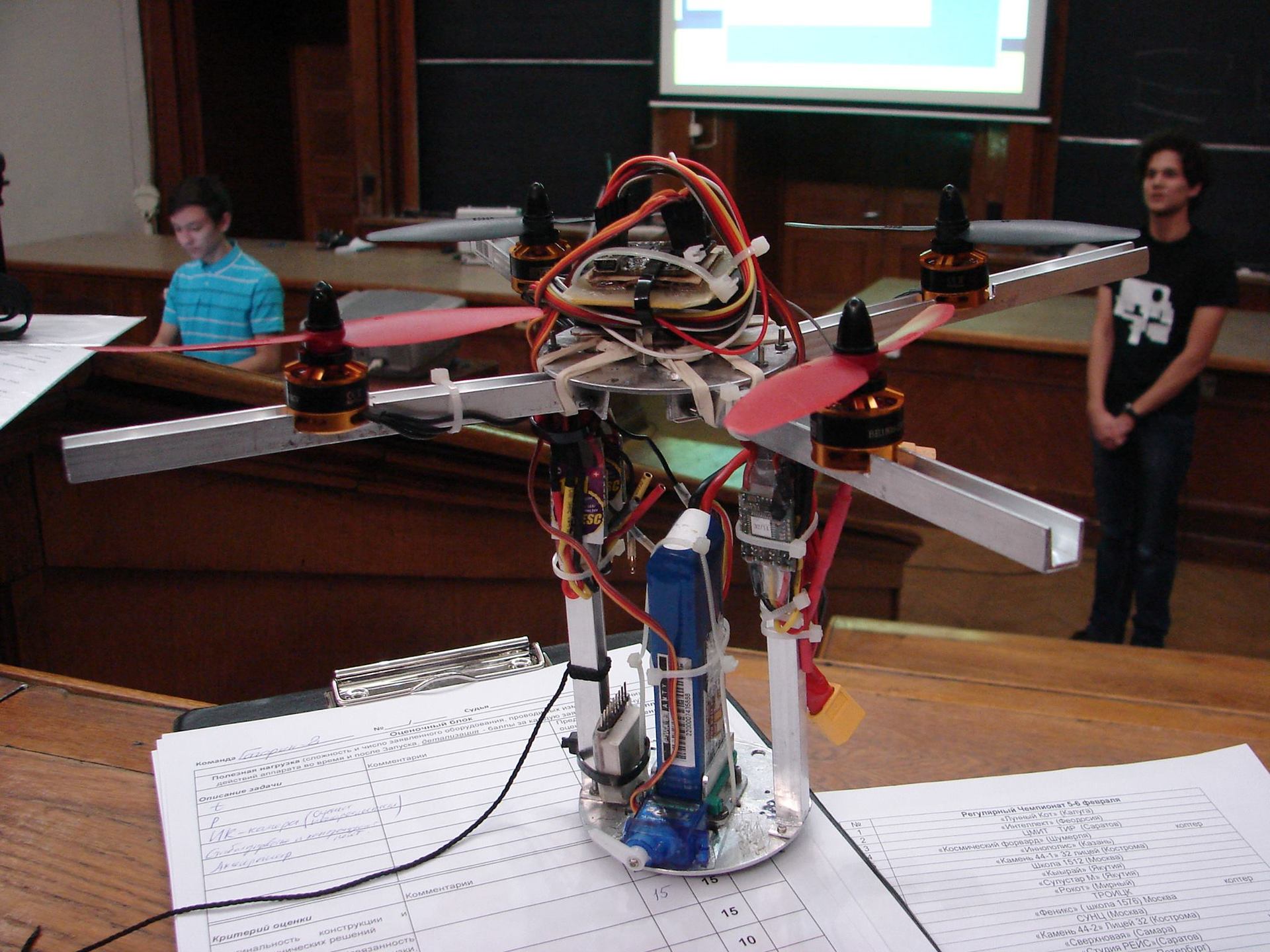 protótipoO primeiro protótipo que fizemos uma semana antes da sessão de inverno para convencer o júri da realidade deste projeto. A estrutura era feita de alumínio, vigas também. Como controlador de vôo, usei o MultiWii, para que esse protótipo só pudesse revelar os raios sob o comando do operador e voar no modo manual.
protótipoO primeiro protótipo que fizemos uma semana antes da sessão de inverno para convencer o júri da realidade deste projeto. A estrutura era feita de alumínio, vigas também. Como controlador de vôo, usei o MultiWii, para que esse protótipo só pudesse revelar os raios sob o comando do operador e voar no modo manual.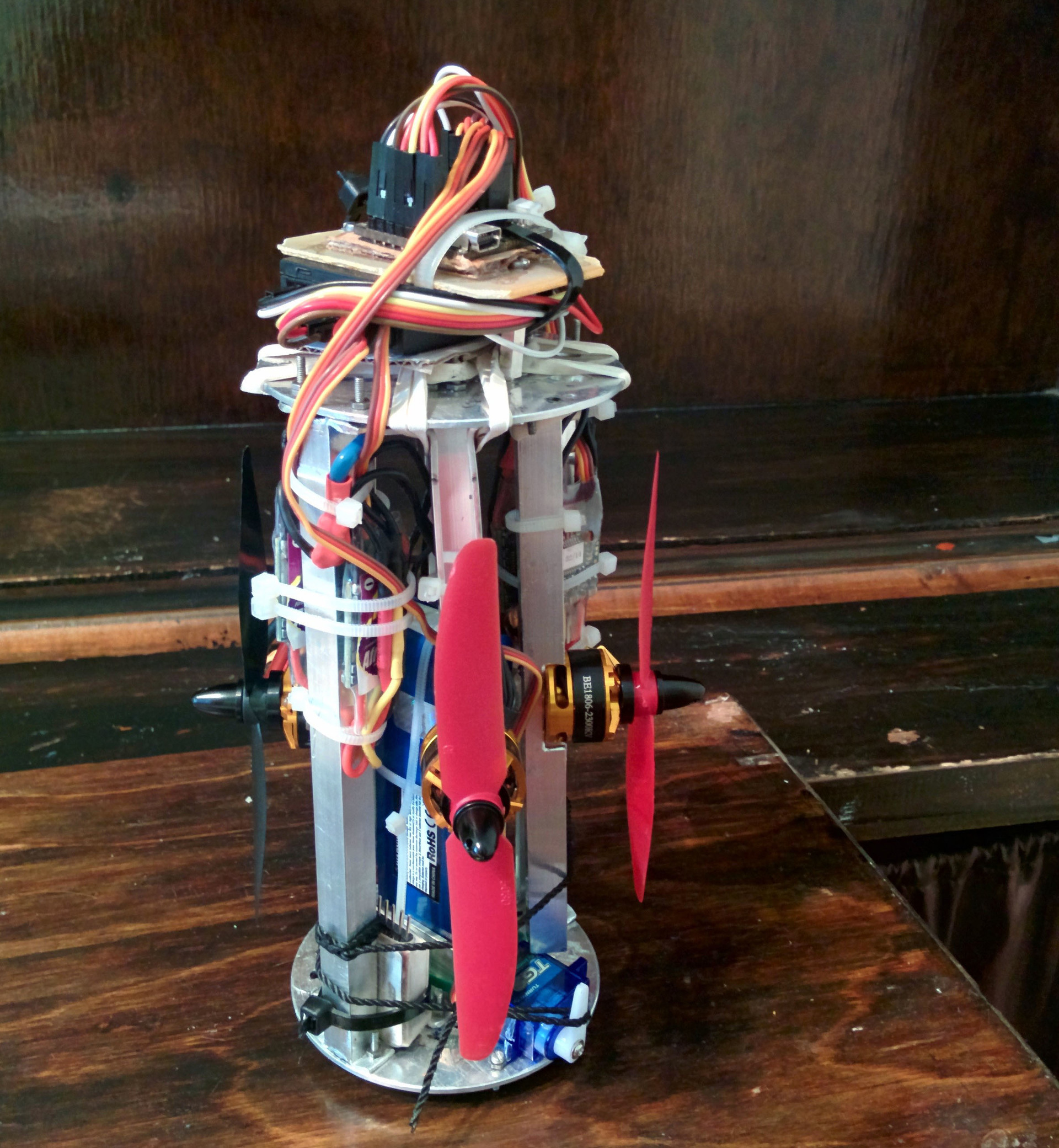 O júri apreciou o projeto, ocupamos o primeiro lugar e agora poderíamos começar a montar. A propósito, logo antes da apresentação durante o voo de teste, nosso motor estava queimando, o trocamos por um sobressalente. Durante a apresentação, o motor voltou a queimar. Ambos estavam conectados ao mesmo controlador de velocidade, não o usamos mais.Infelizmente, a fonte de financiamento desapareceu, parecia mais perto de passar no exame, aqui não pude participar. Como resultado, após a aprovação nos exames, solicitamos com urgência as peças necessárias por entrega expressa e, armados com tubos de carbono, fios Kevlar e epóxi, começamos a montar a estrutura e as vigas. Ao longo das duas semanas, a idéia de que não tínhamos tempo não me deixou, mas os bilhetes de trem foram comprados, não havia como voltar atrás.
O júri apreciou o projeto, ocupamos o primeiro lugar e agora poderíamos começar a montar. A propósito, logo antes da apresentação durante o voo de teste, nosso motor estava queimando, o trocamos por um sobressalente. Durante a apresentação, o motor voltou a queimar. Ambos estavam conectados ao mesmo controlador de velocidade, não o usamos mais.Infelizmente, a fonte de financiamento desapareceu, parecia mais perto de passar no exame, aqui não pude participar. Como resultado, após a aprovação nos exames, solicitamos com urgência as peças necessárias por entrega expressa e, armados com tubos de carbono, fios Kevlar e epóxi, começamos a montar a estrutura e as vigas. Ao longo das duas semanas, a idéia de que não tínhamos tempo não me deixou, mas os bilhetes de trem foram comprados, não havia como voltar atrás.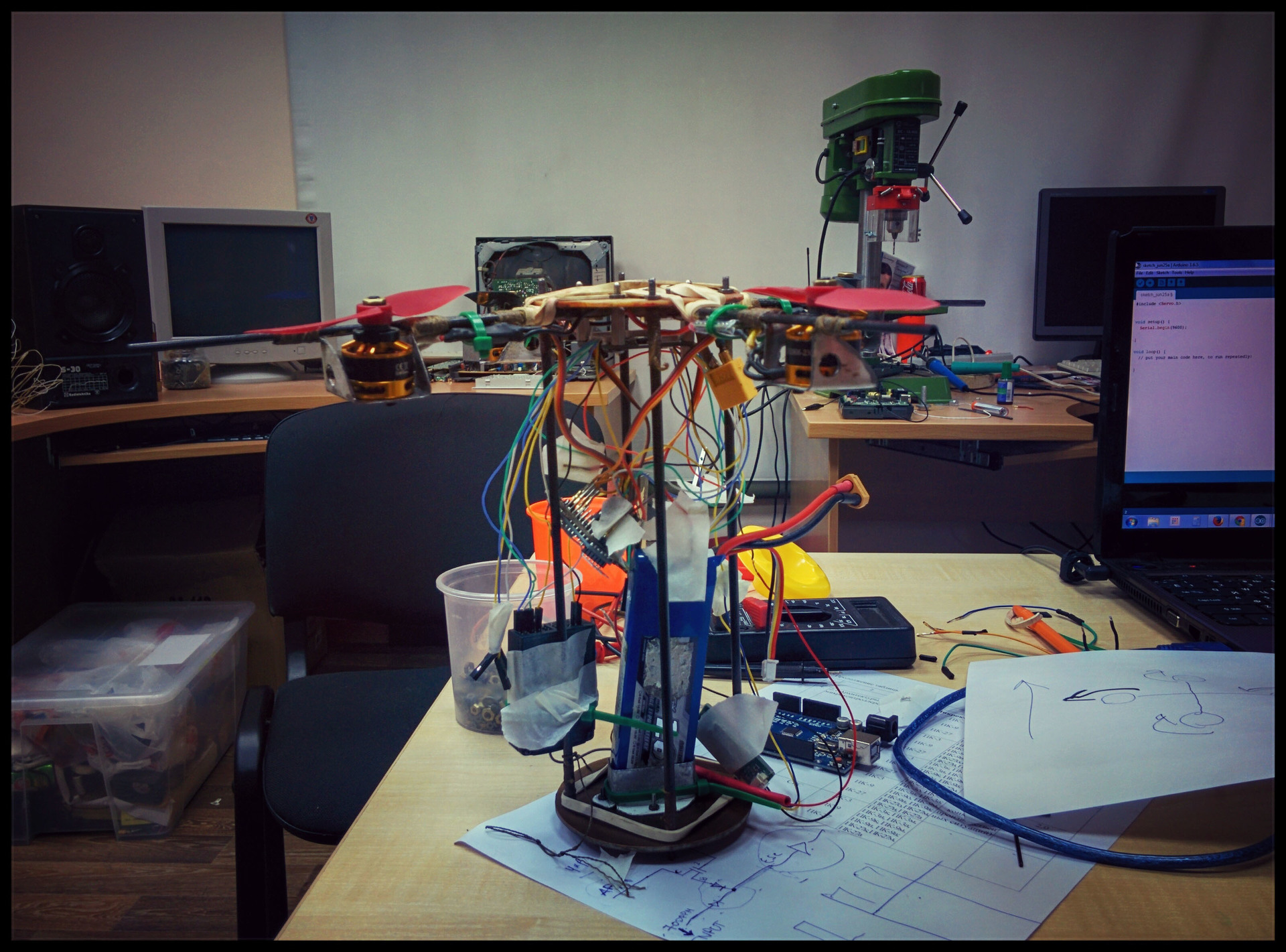 debugar a versão finalNão precisávamos falar de sérios testes de vôo, tínhamos apenas um modelo em funcionamento; sua perda significava falha.O primeiro lançamento foi dentro do prédio, foi bem-sucedido, o segundo lançamento na rua no modo manual foi bem-sucedido, o terceiro lançamento no modo de espera por GPS foi quase fatal. Devido a um magnetômetro ajustado incorretamente, a sonda deixou de obedecer aos comandos e voou em direção ao lago mais próximo, já que a parede do albergue o deteve. Perdemos 2 vigas e 2 hélices, o quadro sobreviveu. Como tínhamos vigas sobressalentes, o desempenho foi restaurado em algumas horas. Após uma longa instalação do magnetômetro, houve outra tentativa - o lançamento foi bem-sucedido.Restava verificar o retorno à base. Esse dia estava logo na minha formatura, mas não havia nada a fazer, fomos para o campo, tentamos voltar para casa - com sucesso. Não havia limite para a alegria, no dia seguinte fomos a Moscou para lançamentos, mas o código para divulgação automática ainda não estava escrito, e parece que repetimos o erro do ano passado.retorno do teste à base, falarei mais sobre o sistema de divulgação automática.Consiste em um servoconversor, corda, elásticos, placa de controle e fotodetector.
debugar a versão finalNão precisávamos falar de sérios testes de vôo, tínhamos apenas um modelo em funcionamento; sua perda significava falha.O primeiro lançamento foi dentro do prédio, foi bem-sucedido, o segundo lançamento na rua no modo manual foi bem-sucedido, o terceiro lançamento no modo de espera por GPS foi quase fatal. Devido a um magnetômetro ajustado incorretamente, a sonda deixou de obedecer aos comandos e voou em direção ao lago mais próximo, já que a parede do albergue o deteve. Perdemos 2 vigas e 2 hélices, o quadro sobreviveu. Como tínhamos vigas sobressalentes, o desempenho foi restaurado em algumas horas. Após uma longa instalação do magnetômetro, houve outra tentativa - o lançamento foi bem-sucedido.Restava verificar o retorno à base. Esse dia estava logo na minha formatura, mas não havia nada a fazer, fomos para o campo, tentamos voltar para casa - com sucesso. Não havia limite para a alegria, no dia seguinte fomos a Moscou para lançamentos, mas o código para divulgação automática ainda não estava escrito, e parece que repetimos o erro do ano passado.retorno do teste à base, falarei mais sobre o sistema de divulgação automática.Consiste em um servoconversor, corda, elásticos, placa de controle e fotodetector. A sonda está imersa em um foguete, está escura lá, com a ajuda do fotodetector MK que corrige, o sistema entra no modo de espera. O foguete começa, a separação, o fluxo de luz aumenta, o servo libera a corda que retém os raios (seu estado normal é devido às bandas de borracha abertas), os raios se abrem, após 3 segundos a placa dá acesso ao microcontrolador de vôo de bordo aos controladores de velocidade, o voo para o primeiro ponto começa, Mais voo para casa.O conselho de gerenciamento de divulgação também controla a câmera infravermelha. Depois de transferirmos o processamento de dados brutos do sensor para o computador, a frequência aumentou de 18 fps para 30 fps (os dados são gravados no microSD). Tivemos que trabalhar duro para controlar os motores: você não pode simplesmente desconectar a conexão entre o MK e os controladores de velocidade primeiro, e depois restaurar - eles não serão iniciados. Primeiro você precisa dar um sinal para inicializar e só então dar acesso ao MK do vôo. Portanto, eu tive que criar um esquema com a capacidade de acessar os reguladores do micron de vôo e do gerente.Continuamos sem problemas para a fase final -
A sonda está imersa em um foguete, está escura lá, com a ajuda do fotodetector MK que corrige, o sistema entra no modo de espera. O foguete começa, a separação, o fluxo de luz aumenta, o servo libera a corda que retém os raios (seu estado normal é devido às bandas de borracha abertas), os raios se abrem, após 3 segundos a placa dá acesso ao microcontrolador de vôo de bordo aos controladores de velocidade, o voo para o primeiro ponto começa, Mais voo para casa.O conselho de gerenciamento de divulgação também controla a câmera infravermelha. Depois de transferirmos o processamento de dados brutos do sensor para o computador, a frequência aumentou de 18 fps para 30 fps (os dados são gravados no microSD). Tivemos que trabalhar duro para controlar os motores: você não pode simplesmente desconectar a conexão entre o MK e os controladores de velocidade primeiro, e depois restaurar - eles não serão iniciados. Primeiro você precisa dar um sinal para inicializar e só então dar acesso ao MK do vôo. Portanto, eu tive que criar um esquema com a capacidade de acessar os reguladores do micron de vôo e do gerente.Continuamos sem problemas para a fase final -lançamentos
E parece que na noite anterior aos lançamentos, tudo está pronto, até testamos o vôo por pontos, ele realmente voa, mas ninguém pensou em fazer uma simulação completa. Como resultado, o barramento que nos levou ao campo de lançamento revelou que o código não estava funcionando corretamente; Convidei um amigo para comentar sobre o ciclo principal em que o trabalho de todos os sistemas adicionais começa a determinar a raiz do problema. Tentamos corrigir o erro durante todo o tempo restante antes do lançamento, pedimos aos organizadores que nos deixassem durar. Por fim, o problema foi resolvido, mas, como se viu, meu amigo, em vez de comentar o ciclo, definiu um retorno de "depuração", que ninguém se incomodou em remover.O foguete, por acaso, não conseguia erguer a sonda pelo quilômetro declarado, apenas 500 metros no dia seguinte, por isso decidimos lançar o hexacóptero. Para simular a localização da sonda em um foguete, colocamos uma tampa no fotodetector, e sua outra extremidade estava ligada a um hexacóptero.E assim o hexacóptero sobe com a nossa sonda oscilante, lentamente se transformando em um ponto indistinguível; a sonda foi lançada por FPV por quilômetro, mas, devido à baixa resolução, não estava claro se a divulgação ocorreu, alguém chegou a dizer que ela não se abriu e caiu com uma pedra (inicialmente ela teve que voar nos pontos indicados e depois voltar para começar, mas mesmo depois de 5 minutos de espera, ninguém o viu). É claro que ficamos chateados e fomos procurar seus restos mortais no campo, mas, observando os dados de telemetria mais recentes, percebemos que, embora a conexão com a sonda tenha acabado, as últimas coordenadas indicam um campo vizinho da pastinaga de vaca. Vamos ao longo das coordenadas; ao longo do caminho, outra equipe disse que ela o viu sentado nos arbustos; pesquisas começaram. Como se viu, é extremamente difícil encontrar uma pequena sonda na grama, mesmo sabendo suas coordenadas.No final, decidi ligar os motores para plantar uma bateria supostamente descarregada, depois tive que limpar o voltímetro embutido. O plano funcionou, achamos sãos e salvos, mesmo as hélices não sofreram, graças aos raios alongados. Os alegres foram para casa para processar os dados, ou melhor, sua ausência, graças ao retorno "debug".É verdade que tivemos dados do controlador de vôo e os analisamos. Tem uma trajetória, um gráfico de alturas e erros de sistema.
Os alegres foram para casa para processar os dados, ou melhor, sua ausência, graças ao retorno "debug".É verdade que tivemos dados do controlador de vôo e os analisamos. Tem uma trajetória, um gráfico de alturas e erros de sistema.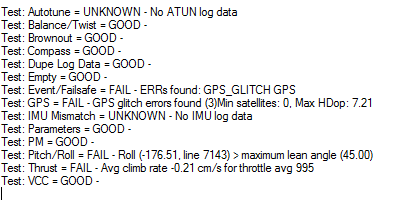
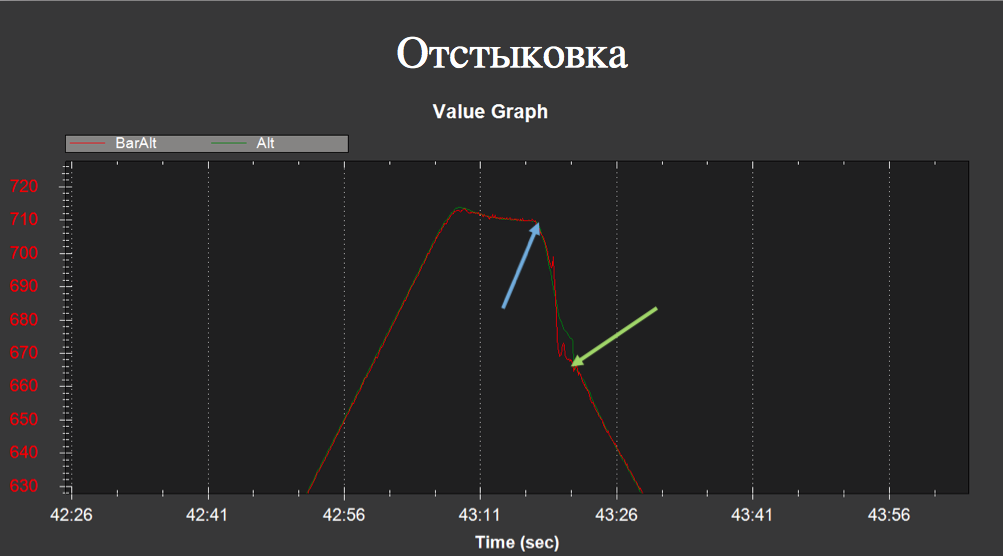 seta azul - o momento de ligar os motores; seta verde - momento da inclusão do modo de voltar paracasa.Também recebemos um registro do hexacopter.O resultado é que ele se separou com sucesso, soltou os raios, ligou os motores, conseguiu nivelar-se de uma posição invertida e voou para o ponto mais próximo.
seta azul - o momento de ligar os motores; seta verde - momento da inclusão do modo de voltar paracasa.Também recebemos um registro do hexacopter.O resultado é que ele se separou com sucesso, soltou os raios, ligou os motores, conseguiu nivelar-se de uma posição invertida e voou para o ponto mais próximo.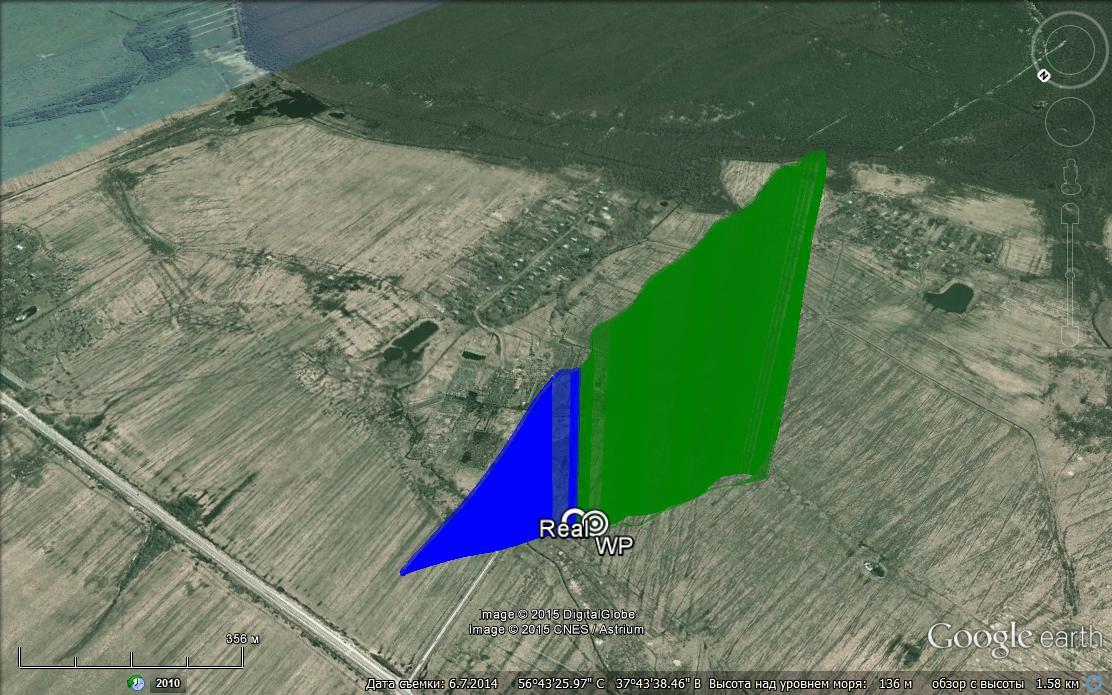 Depois, houve uma perda de comunicação com a estação base, este é exatamente o momento que eu não levei em consideração. Nas configurações padrão, ele foi instruído a interromper o vôo por pontos e voar para casa, então ele parou de descer e se preparou para a base, mas lá estava, ligamos os motores muito rapidamente, antes que tivéssemos tempo para "aquecer" o GPS, para que ele não se lembrasse dessas coordenadas , Não registrei corretamente o ponto da casa (embora seja uma pergunta o motivo de ela estar em uma linha reta ao longo do caminho). Então ele fez um pouso suave no modo automático e desligou os motores.
Depois, houve uma perda de comunicação com a estação base, este é exatamente o momento que eu não levei em consideração. Nas configurações padrão, ele foi instruído a interromper o vôo por pontos e voar para casa, então ele parou de descer e se preparou para a base, mas lá estava, ligamos os motores muito rapidamente, antes que tivéssemos tempo para "aquecer" o GPS, para que ele não se lembrasse dessas coordenadas , Não registrei corretamente o ponto da casa (embora seja uma pergunta o motivo de ela estar em uma linha reta ao longo do caminho). Então ele fez um pouso suave no modo automático e desligou os motores.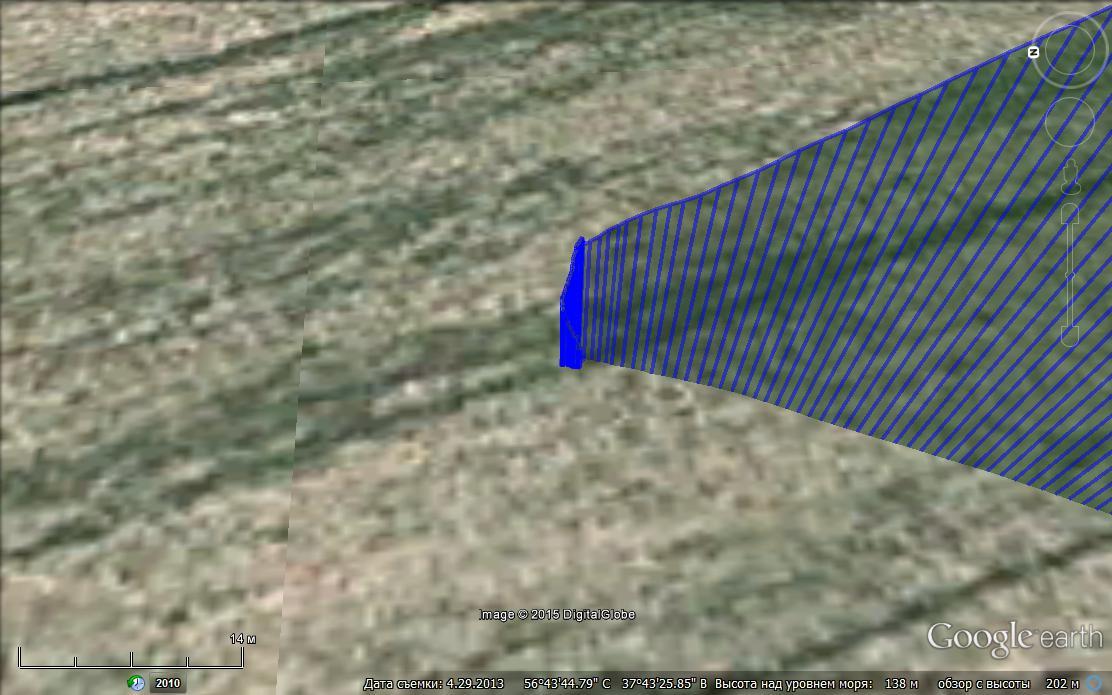 Depois de tantos erros, não esperávamos ocupar o primeiro lugar, mas o júri parecia gostar da idéia. Então vencemos o quarto campeonato CanSat na Rússia.
Depois de tantos erros, não esperávamos ocupar o primeiro lugar, mas o júri parecia gostar da idéia. Então vencemos o quarto campeonato CanSat na Rússia.PS
Eu nunca encontrei um único projeto de trabalho na descida controlada da sonda CanSat, talvez sejamos os primeiros, isso é até estranho, pois tudo era relativamente simples.Referências:
Aqui você pode ler sobre o kansat do ano passado.Siteoficial, se você quiser participar,o site do firmware que usamos para o vôo autônomoPosfácio?
- , , . , .
?
, , , .
?
300$ 500$, . , , , . , .
GPS ?
( ).