Os robôs foram ensinados a cair com segurança estudando quedas de gatos
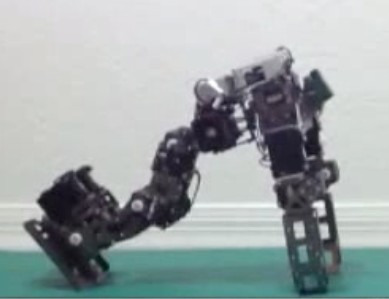 Ninguém está a salvo de uma queda inesperada. Sempre existe o risco de tropeçar e voar para o chão sem sucesso. Isso pode acontecer não apenas com uma pessoa, mas também com um robô .Pesquisadores do Instituto de Tecnologia da Geórgia desenvolveram um algoritmo que garante que o robô trava com o menor dano possível. Esse é um trabalho muito importante, porque o custo dos robôs às vezes chega a dezenas de milhares de dólares e, devido a um acidente, você pode sofrer sérias perdas. Além disso, os robôs do tipo humanóide estão cada vez mais trabalhando perto de humanos, incluindo idosos e crianças. Se cair de uma maneira não ideal, pode machucar uma pessoa.O algoritmo fornece uma estratégia ideal em resposta a uma grande variedade de quedas, incluindo queda de um puxão fraco ou de um golpe forte, quando o robô precisa executar uma série de cambalhotas. De qualquer forma, o robô minimiza os danos. O algoritmo foi testado em um experimento real com o robô humanóide BioloidGP (veja o vídeo)."Acreditamos que os robôs podem aprender a cair com segurança", diz Sehoon Ha, co-autor do artigo. “Nosso trabalho combina pesquisas existentes sobre o ensino de robôs a cair, fornecendo uma ferramenta para determinar automaticamente o número total de contatos, a ordem dos contatos, a posição e a hora desses contatos. Tudo isso afeta as consequências da queda e altera a resposta do robô ".O trabalho científico é baseado em um estudo anterior da professora Karen Liu, onde ele estudou a física da transformação do corpo de um gato durante uma queda .Desse trabalho, soube-se que o fator chave é o ângulo de aterrissagem. Os robôs estão equipados com computadores de bordo, mas não são inicialmente adaptados para resolver o problema da aterrissagem segura, portanto, eles não sabem o que fazer quando caem. Graças ao novo algoritmo, um programa aparecerá no computador para calcular a sequência de ações necessária, dependendo da velocidade e direção da queda. Existe poder de computação suficiente para realizar cálculos em tempo real.O artigo científico “Planejamento de múltiplos contatos para minimizar danos a quedas de humanóides” ( pdf ) foi apresentado em outubro na conferência internacional Robots e Sistemas Inteligentes em Hamburgo.
Ninguém está a salvo de uma queda inesperada. Sempre existe o risco de tropeçar e voar para o chão sem sucesso. Isso pode acontecer não apenas com uma pessoa, mas também com um robô .Pesquisadores do Instituto de Tecnologia da Geórgia desenvolveram um algoritmo que garante que o robô trava com o menor dano possível. Esse é um trabalho muito importante, porque o custo dos robôs às vezes chega a dezenas de milhares de dólares e, devido a um acidente, você pode sofrer sérias perdas. Além disso, os robôs do tipo humanóide estão cada vez mais trabalhando perto de humanos, incluindo idosos e crianças. Se cair de uma maneira não ideal, pode machucar uma pessoa.O algoritmo fornece uma estratégia ideal em resposta a uma grande variedade de quedas, incluindo queda de um puxão fraco ou de um golpe forte, quando o robô precisa executar uma série de cambalhotas. De qualquer forma, o robô minimiza os danos. O algoritmo foi testado em um experimento real com o robô humanóide BioloidGP (veja o vídeo)."Acreditamos que os robôs podem aprender a cair com segurança", diz Sehoon Ha, co-autor do artigo. “Nosso trabalho combina pesquisas existentes sobre o ensino de robôs a cair, fornecendo uma ferramenta para determinar automaticamente o número total de contatos, a ordem dos contatos, a posição e a hora desses contatos. Tudo isso afeta as consequências da queda e altera a resposta do robô ".O trabalho científico é baseado em um estudo anterior da professora Karen Liu, onde ele estudou a física da transformação do corpo de um gato durante uma queda .Desse trabalho, soube-se que o fator chave é o ângulo de aterrissagem. Os robôs estão equipados com computadores de bordo, mas não são inicialmente adaptados para resolver o problema da aterrissagem segura, portanto, eles não sabem o que fazer quando caem. Graças ao novo algoritmo, um programa aparecerá no computador para calcular a sequência de ações necessária, dependendo da velocidade e direção da queda. Existe poder de computação suficiente para realizar cálculos em tempo real.O artigo científico “Planejamento de múltiplos contatos para minimizar danos a quedas de humanóides” ( pdf ) foi apresentado em outubro na conferência internacional Robots e Sistemas Inteligentes em Hamburgo.Source: https://habr.com/ru/post/pt385377/
All Articles