Aspiradores de pó robóticos test drive
 Os robôs que sabem como coletar poeira em instalações residenciais entraram no mercado russo há relativamente pouco tempo, mas já conseguiram evoluir e, sem exageros, tornaram-se os robôs domésticos mais comuns em nosso país e no mundo. No entanto, desde o momento em que apareceram (2009) até o momento atual (2015), as disputas sobre seus benefícios e a justificativa de tal aquisição não desapareceram na sociedade. Afinal, o dispositivo como era e continua bastante caro - seu custo às vezes excede o preço de um aspirador de pó potente clássico para limpeza manual em 3-4 vezes. Isso não pode ser dito sobre a energia e a possibilidade fundamental de coletar contaminantes do chão, uma vez que o robô é móvel e alimentado por baterias, que no atual nível de desenvolvimento da tecnologia não conseguem armazenar energia em uma escala de “quilowatt”, acessível a partir da tomada para aspiradores de pó convencionais.Portanto, principalmente na Internet, fóruns e apenas nas lojas, surgem perguntas:Diremos imediatamente que inicialmente apenas uma visão geral do promissor modelo TORNADO do fabricante francês e.ziclean foi planejada, no exemplo do qual deveria realizar uma avaliação fundamental das capacidades dos aspiradores de pó robóticos para limpeza. Mas, no processo de teste, havia um interesse incontrolável, se não empolgante, de verificar se havia outros dispositivos dessa categoria para formar uma impressão mais holística das capacidades dos robôs. Um grupo de fãs formados em torno de fabricantes individuais, prontos para discutir o tempo todo sobre as vantagens de um modelo e as desvantagens de outro, também falam em favor disso. Como resultado, foram adicionados mais dois participantes do teste: o muito popular Iclebo Arte na Rússia e a série Clever & Clean V, que acidentalmente acabaram à nossa disposição.Com base nas características desses robôs, resultou não apenas uma comparação, mas um confronto de diferentes projetos e conceitos algorítmicos. Havia um aspirador de pó de duas escovas com um aspirador de uma escova, um modo caótico de movimento consistente com o mapa da sala, aspiradores de pó com um arranjo lateral de escovas em relação ao movimento competiriam com um aspirador de pó com um arranjo em forma de V.Posteriormente, logicamente chegamos à necessidade de criar um diagrama final com os resultados das medições e características objetivas dos robôs, simplificando a escolha do dispositivo do futuro animal de estimação robótico. Planejamos atualizá-lo após cada teste para compilar uma classificação de eficiência e otimização em termos da relação qualidade-preço dos robôs no mercado. É verdade que, neste artigo, uma revisão detalhada da Iclebo Arte e da série V inteligente e limpa V foi deixada nos bastidores, uma vez que estão no mercado há muito tempo e há análises suficientes de designs com aparência, portanto, eles se limitaram a apenas um programa de teste.
Os robôs que sabem como coletar poeira em instalações residenciais entraram no mercado russo há relativamente pouco tempo, mas já conseguiram evoluir e, sem exageros, tornaram-se os robôs domésticos mais comuns em nosso país e no mundo. No entanto, desde o momento em que apareceram (2009) até o momento atual (2015), as disputas sobre seus benefícios e a justificativa de tal aquisição não desapareceram na sociedade. Afinal, o dispositivo como era e continua bastante caro - seu custo às vezes excede o preço de um aspirador de pó potente clássico para limpeza manual em 3-4 vezes. Isso não pode ser dito sobre a energia e a possibilidade fundamental de coletar contaminantes do chão, uma vez que o robô é móvel e alimentado por baterias, que no atual nível de desenvolvimento da tecnologia não conseguem armazenar energia em uma escala de “quilowatt”, acessível a partir da tomada para aspiradores de pó convencionais.Portanto, principalmente na Internet, fóruns e apenas nas lojas, surgem perguntas:Diremos imediatamente que inicialmente apenas uma visão geral do promissor modelo TORNADO do fabricante francês e.ziclean foi planejada, no exemplo do qual deveria realizar uma avaliação fundamental das capacidades dos aspiradores de pó robóticos para limpeza. Mas, no processo de teste, havia um interesse incontrolável, se não empolgante, de verificar se havia outros dispositivos dessa categoria para formar uma impressão mais holística das capacidades dos robôs. Um grupo de fãs formados em torno de fabricantes individuais, prontos para discutir o tempo todo sobre as vantagens de um modelo e as desvantagens de outro, também falam em favor disso. Como resultado, foram adicionados mais dois participantes do teste: o muito popular Iclebo Arte na Rússia e a série Clever & Clean V, que acidentalmente acabaram à nossa disposição.Com base nas características desses robôs, resultou não apenas uma comparação, mas um confronto de diferentes projetos e conceitos algorítmicos. Havia um aspirador de pó de duas escovas com um aspirador de uma escova, um modo caótico de movimento consistente com o mapa da sala, aspiradores de pó com um arranjo lateral de escovas em relação ao movimento competiriam com um aspirador de pó com um arranjo em forma de V.Posteriormente, logicamente chegamos à necessidade de criar um diagrama final com os resultados das medições e características objetivas dos robôs, simplificando a escolha do dispositivo do futuro animal de estimação robótico. Planejamos atualizá-lo após cada teste para compilar uma classificação de eficiência e otimização em termos da relação qualidade-preço dos robôs no mercado. É verdade que, neste artigo, uma revisão detalhada da Iclebo Arte e da série V inteligente e limpa V foi deixada nos bastidores, uma vez que estão no mercado há muito tempo e há análises suficientes de designs com aparência, portanto, eles se limitaram a apenas um programa de teste. MECÂNICA DE LIMPEZA
Um aspirador de pó comum conectado a uma tomada doméstica não surpreenderá ninguém agora. É tão fortemente inserido na vida cotidiana de toda pessoa moderna que é dado como certo. Considere a diferença entre um limpador automático.O aspirador de pó clássico, que pode ser facilmente encontrado em qualquer loja de eletrodomésticos, coleta poeira devido ao vácuo criado por uma bomba poderosa bombeando uma grande quantidade de ar pela parte de sucção do dispositivo. Esse mesmo ar, movendo-se dentro do aspirador a uma velocidade relativamente alta, carrega tudo o que está no chão ou em qualquer outra superfície a ser limpa. No interior, poeira e sujeira são mantidas no lugar com um filtro, que pode ter um design muito diferente. Recentemente, os filtros de ciclone estão se tornando cada vez mais populares quando o ar contaminado é limpo por força centrífuga que surge em um tanque cilíndrico quando o fluxo de ar é torcido de uma maneira especial. É muito convenientepara que você não precise comprar sacolas adicionais para coletar poeira, basta jogar fora a sujeira do recipiente de plástico após a limpeza. É assim que o aspirador de mão de mão Electrolux de referência é usado, que usamos para comparar com aspiradores de pó robóticos.  Aspirador de pó doméstico normal tipo ciclone Electrolux e potência 2200 watts. Como um aspirador de pó doméstico comum está conectado, existe essencialmente acesso a uma fonte de energia "ilimitada", usada ativamente por todos os fabricantes, sem exceção, ao projetar dispositivos, bem como para fins de marketing. Os aspiradores de pó alimentados por uma tomada têm alta potência, o que é confirmado por nosso participante fora da competição - sua potência é de 2,2 kW.E aqui vem a primeira característica dos robôs no mercado projetados para a limpeza autônoma da sala. O fato é que, para movimentos independentes pela sala com limpeza simultânea, o robô inevitavelmente usará a bateria embutida. Isso é seguro e relativamente barato devido ao fato de que não há necessidade de fornecer mecanismos extremamente complexos e, como resultado, caros para impedir o enrolamento dos cabos. Ao limpar com um aspirador de pó clássico, geralmente endireitamos o cabo e garantimos que ele não caia na zona de sucção e não seja retirado da tomada. No caso do robô, hoje é muito problemático fazer com que o produto final não custe centenas de milhares de rublos. Portanto, apenas a bateria! Nesse caso, a capacidade média da bateria embutida é de 2 a 6 A * h.Este estoque é suficiente para garantir a potência de sucção no nível de 30 a 50 watts. Como resultado, a única maneira de garantir alta eficiência de limpeza é equipar adicionalmente o aspirador com uma escova rotativa ou duas, como ficou na moda recentemente.A segunda diferença importante entre um robô e um aspirador de pó convencional é que ele é limpo de forma independente e não requer envolvimento humano. Aqui, a capacidade do dispositivo de navegar no espaço e cobrir toda a área sem deixar áreas não limpas para garantir a coleta máxima de poeira. Essa habilidade, por sua vez, depende do sistema do sensor, da unidade de computação, com ou sem a capacidade de mapear a sala e registrar na memória as áreas limpas, identificar áreas não limpas e planejar sua limpeza seqüencial. Curiosamente, isso também é importante para uma pessoa durante a limpeza manual, uma vez que tendemos a nos apressar no processo de coleta de poeira, razão pela qual não existem omissões raras ao trabalhar com um aspirador de pó comum. É ainda mais interessante descobrir a real eficácia de diferentes métodos de coleta de poeira.
Aspirador de pó doméstico normal tipo ciclone Electrolux e potência 2200 watts. Como um aspirador de pó doméstico comum está conectado, existe essencialmente acesso a uma fonte de energia "ilimitada", usada ativamente por todos os fabricantes, sem exceção, ao projetar dispositivos, bem como para fins de marketing. Os aspiradores de pó alimentados por uma tomada têm alta potência, o que é confirmado por nosso participante fora da competição - sua potência é de 2,2 kW.E aqui vem a primeira característica dos robôs no mercado projetados para a limpeza autônoma da sala. O fato é que, para movimentos independentes pela sala com limpeza simultânea, o robô inevitavelmente usará a bateria embutida. Isso é seguro e relativamente barato devido ao fato de que não há necessidade de fornecer mecanismos extremamente complexos e, como resultado, caros para impedir o enrolamento dos cabos. Ao limpar com um aspirador de pó clássico, geralmente endireitamos o cabo e garantimos que ele não caia na zona de sucção e não seja retirado da tomada. No caso do robô, hoje é muito problemático fazer com que o produto final não custe centenas de milhares de rublos. Portanto, apenas a bateria! Nesse caso, a capacidade média da bateria embutida é de 2 a 6 A * h.Este estoque é suficiente para garantir a potência de sucção no nível de 30 a 50 watts. Como resultado, a única maneira de garantir alta eficiência de limpeza é equipar adicionalmente o aspirador com uma escova rotativa ou duas, como ficou na moda recentemente.A segunda diferença importante entre um robô e um aspirador de pó convencional é que ele é limpo de forma independente e não requer envolvimento humano. Aqui, a capacidade do dispositivo de navegar no espaço e cobrir toda a área sem deixar áreas não limpas para garantir a coleta máxima de poeira. Essa habilidade, por sua vez, depende do sistema do sensor, da unidade de computação, com ou sem a capacidade de mapear a sala e registrar na memória as áreas limpas, identificar áreas não limpas e planejar sua limpeza seqüencial. Curiosamente, isso também é importante para uma pessoa durante a limpeza manual, uma vez que tendemos a nos apressar no processo de coleta de poeira, razão pela qual não existem omissões raras ao trabalhar com um aspirador de pó comum. É ainda mais interessante descobrir a real eficácia de diferentes métodos de coleta de poeira. Revisão do aspirador de pó robô TORNADO
Começamos a revisão do dispositivo com um conjunto completo. Tendo aberto a caixa, o comprador encontrará diretamente o robô e tudo o que é necessário para o seu trabalho regular. 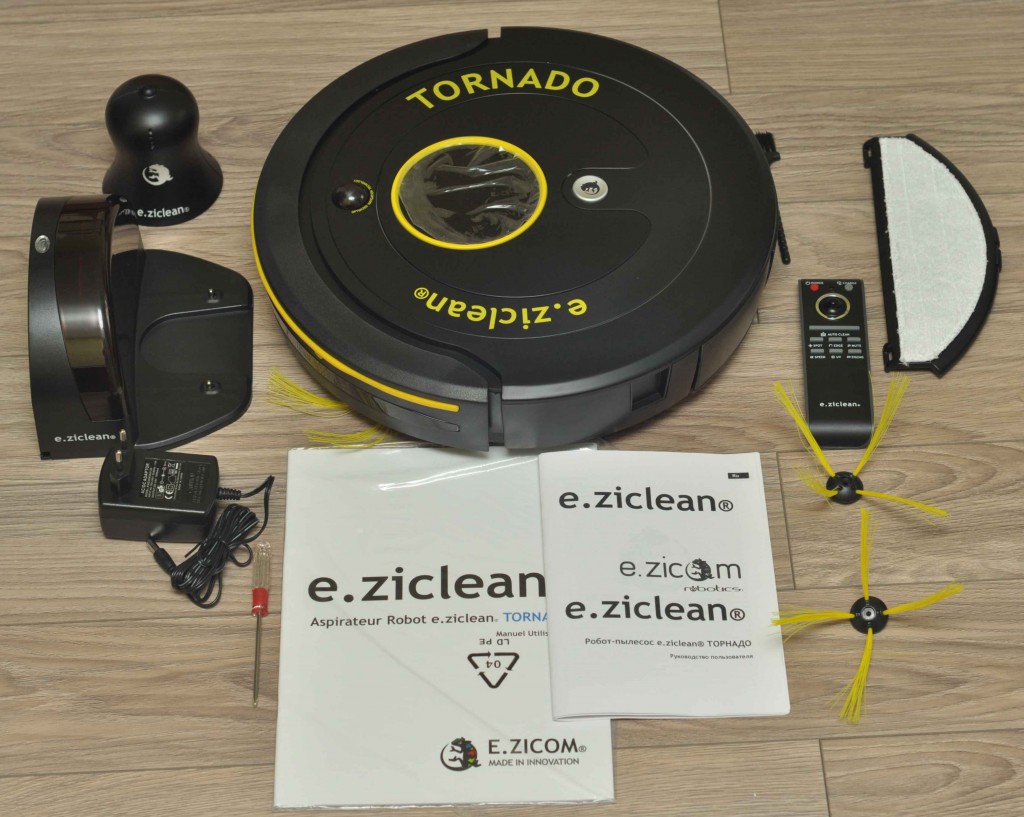 As opções podem ser chamadas acima da média. Além do robô obrigatório, uma base de carregamento para ele com uma fonte de alimentação, instruções e um polidor de bicos, o kit inclui: um conjunto de escovas laterais sobressalentes, uma parede virtual, um controle remoto que torna o aspirador mais conveniente e confortável e até uma chave de fenda.Agora vamos voltar os olhos para o design. Aqui, os desenvolvedores chegaram a muitas coisas interessantes.
As opções podem ser chamadas acima da média. Além do robô obrigatório, uma base de carregamento para ele com uma fonte de alimentação, instruções e um polidor de bicos, o kit inclui: um conjunto de escovas laterais sobressalentes, uma parede virtual, um controle remoto que torna o aspirador mais conveniente e confortável e até uma chave de fenda.Agora vamos voltar os olhos para o design. Aqui, os desenvolvedores chegaram a muitas coisas interessantes. Então TORNADO olha de cima.
Então TORNADO olha de cima.  E assim por trás. As escovas descansam no chão e estão prontas para ir.
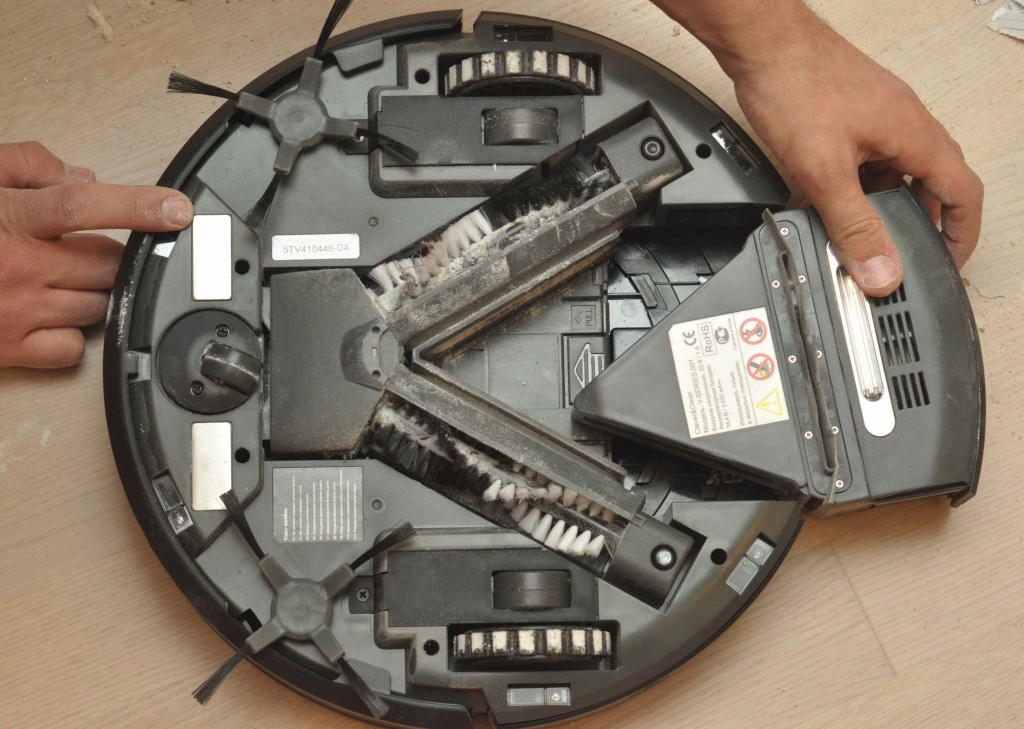
E assim por trás. As escovas descansam no chão e estão prontas para ir.  O design da parte inferior do aspirador de pó. Em primeiro lugar, o TORNADO está equipado com duas escovas. Um é maior e aparentemente pretende coletar contaminantes maiores, e o segundo é mais compacto, aparentemente para pequenas frações de sujeira.
O design da parte inferior do aspirador de pó. Em primeiro lugar, o TORNADO está equipado com duas escovas. Um é maior e aparentemente pretende coletar contaminantes maiores, e o segundo é mais compacto, aparentemente para pequenas frações de sujeira. 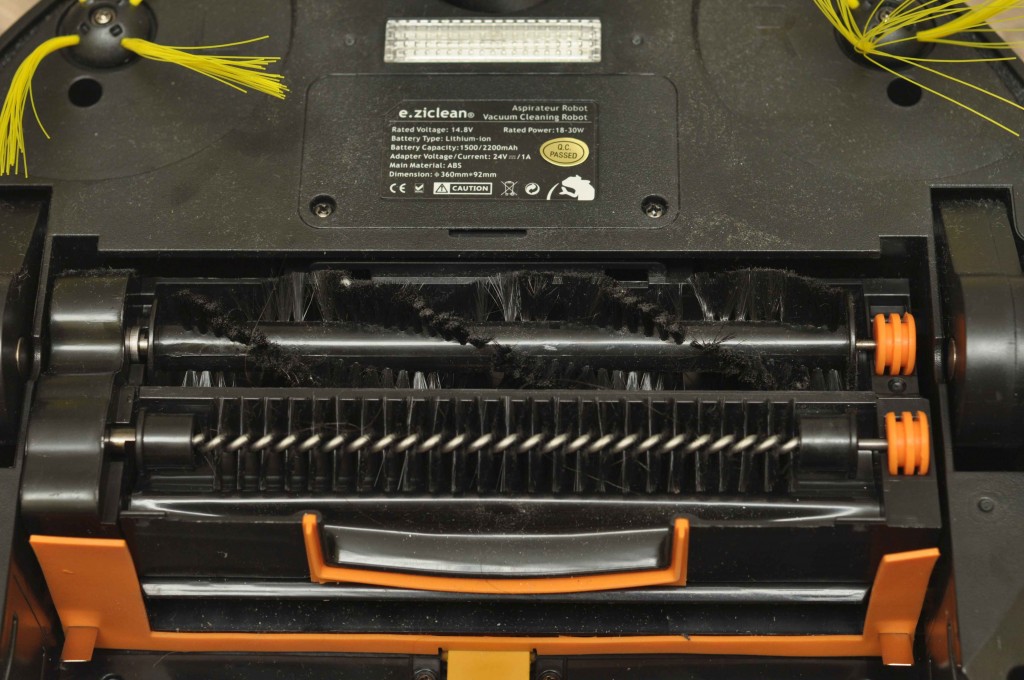
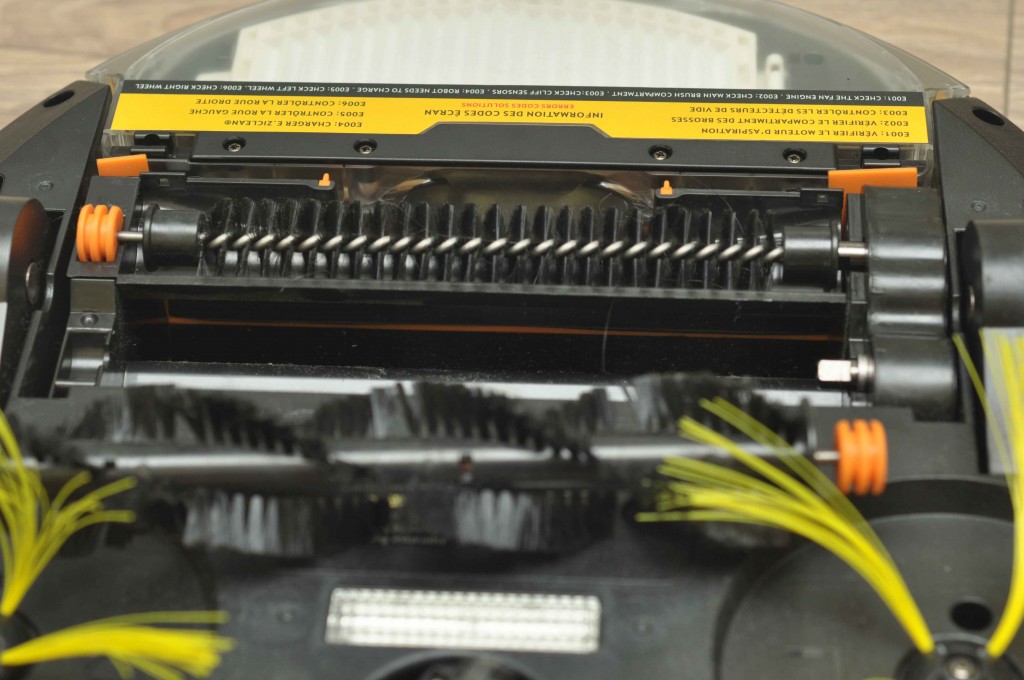 As escovas são removidas para limpeza com um movimento do pulso.
As escovas são removidas para limpeza com um movimento do pulso.  Cada escova tem seu próprio canal para o movimento de contaminantes no recipiente. Vale ressaltar que cada pincel trabalha em seu próprio compartimento do recipiente para coletar poeira. O maior é para um canal largo de uma escova grande e um compartimento muito pequeno (sob o filtro) para um canal estreito de uma escova pequena.
Cada escova tem seu próprio canal para o movimento de contaminantes no recipiente. Vale ressaltar que cada pincel trabalha em seu próprio compartimento do recipiente para coletar poeira. O maior é para um canal largo de uma escova grande e um compartimento muito pequeno (sob o filtro) para um canal estreito de uma escova pequena.  Recipiente removível de poeira com dois recipientes. O segundo grande recurso de design é a turbina da bomba. Com seu tamanho compacto, gira a uma velocidade de 8000 rpm e, de acordo com o fabricante, fornece um poder de absorção sem precedentes.
Recipiente removível de poeira com dois recipientes. O segundo grande recurso de design é a turbina da bomba. Com seu tamanho compacto, gira a uma velocidade de 8000 rpm e, de acordo com o fabricante, fornece um poder de absorção sem precedentes.  A bomba da turbina é compacta e colocada diretamente no recipiente de poeira.
A bomba da turbina é compacta e colocada diretamente no recipiente de poeira.  E aqui está a própria bomba. As pás da turbina são claramente visíveis.
E aqui está a própria bomba. As pás da turbina são claramente visíveis.  Contatos na bomba quanto à sua potência.
Contatos na bomba quanto à sua potência.  O ar é aspirado através de um filtro especial. Outra característica do aspirador de pó é a capacidade de fixar um pano de microfibra na parte inferior do robô. Nesse caso, o robô não apenas varrerá e aspirará, mas também limpará o chão. O principal é não esquecer de umedecer o guardanapo com água antes do ciclo de limpeza.
O ar é aspirado através de um filtro especial. Outra característica do aspirador de pó é a capacidade de fixar um pano de microfibra na parte inferior do robô. Nesse caso, o robô não apenas varrerá e aspirará, mas também limpará o chão. O principal é não esquecer de umedecer o guardanapo com água antes do ciclo de limpeza.  Teoricamente, um bico com um pano de microfibra permite que você limpe ainda mais. Também é apropriado observar o design das escovas de montagem. É muito confiável e durável, pois é baseado em rolamentos de metal.
Teoricamente, um bico com um pano de microfibra permite que você limpe ainda mais. Também é apropriado observar o design das escovas de montagem. É muito confiável e durável, pois é baseado em rolamentos de metal.  Suporte de escova de borracha.
Suporte de escova de borracha.  E embaixo dele há um rolamento. O restante do equipamento do robô é bastante padrão.
E embaixo dele há um rolamento. O restante do equipamento do robô é bastante padrão. 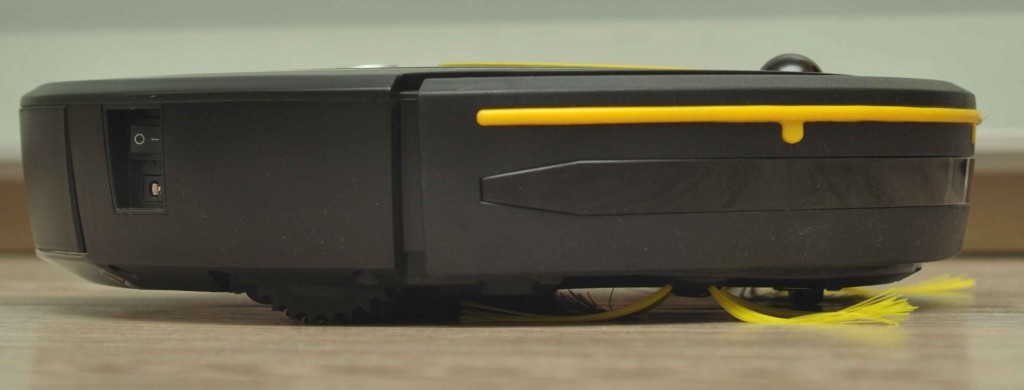 O robô está equipado com um cinto de sensores ópticos que evitam colisões com itens domésticos.
O robô está equipado com um cinto de sensores ópticos que evitam colisões com itens domésticos.  O controle remoto é conveniente e informativo.
O controle remoto é conveniente e informativo.  Mas quando você olha para a tela, sente uma leve falta de legibilidade, mas em geral não há problemas.
Mas quando você olha para a tela, sente uma leve falta de legibilidade, mas em geral não há problemas. 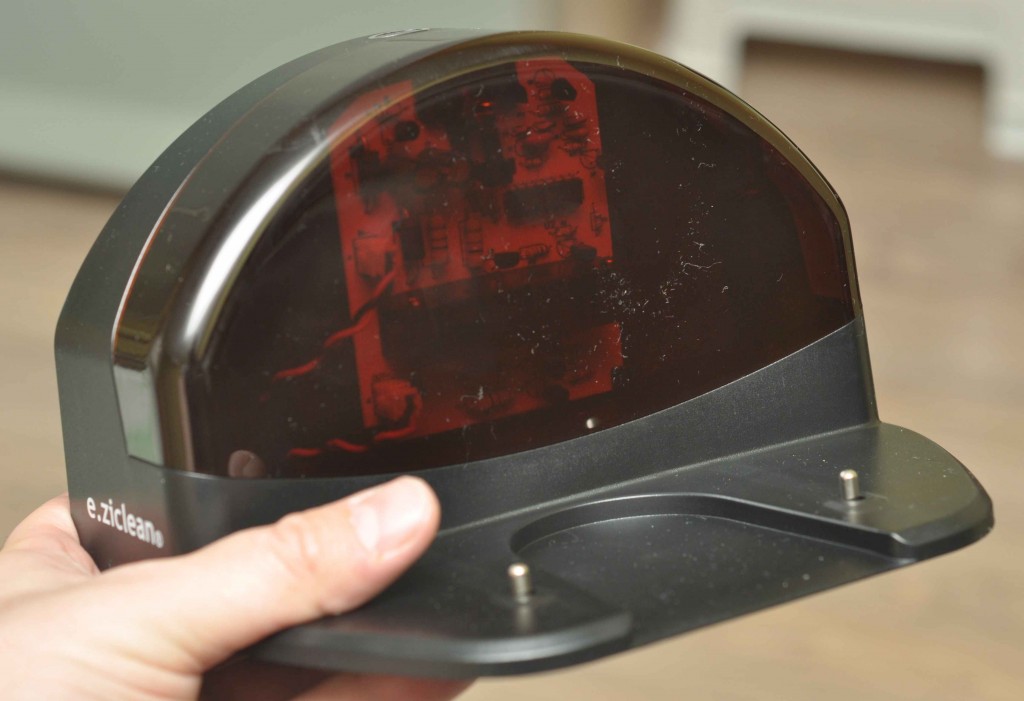 A base de carregamento parece um pouco extravagante. O vidro é translúcido através do qual o enchimento eletrônico é visível. Contatos para carregar um aspirador de pó.
A base de carregamento parece um pouco extravagante. O vidro é translúcido através do qual o enchimento eletrônico é visível. Contatos para carregar um aspirador de pó.  Este dispositivo ajuda o dispositivo a não deixar para onde não deve ligar.
Este dispositivo ajuda o dispositivo a não deixar para onde não deve ligar. MÉTODO DE ENSAIO
Com base nas perguntas feitas no início do artigo, bem como na posição do resultado final desejado, o programa de teste é óbvio.Para que toda a superfície do piso seja completamente limpa de sujeira, o robô deve ser dotado de duas propriedades principais. Antes de tudo, essa é a capacidade fundamental de coletar qualitativamente todos os tipos de poluição doméstica. E a segunda é a capacidade de navegar dentro de casa e planejar a limpeza de toda a área confiada, para que não haja áreas não limpas. São essas habilidades que testaremos em duas tentativas com o mesmo nome. Além disso, essas considerações são válidas para aspiradores de pó de qualquer modelo.Para verificar a qualidade da coleta de sujeira, preparamos uma pequena arena. Os tamanhos para medir este indicador não desempenham um papel especial. O importante é a porcentagem de contaminação que o dispositivo é capaz de coletar. Tentamos simular a poluição o mais próximo possível das reais. Em todas as casas no chão, há um pó fino - a farinha atuou como tal - esse é o pó mais difícil de coletar. Muitas vezes, existem detritos maiores, como migalhas ou areia de rua - açúcar granulado e migalhas de pão foram levados para eles. Obviamente, algo bastante específico pode cair sob as rodas, por isso adicionamos agulhas e pedaços de papel. Tudo isto foi misturado em quantidades aproximadamente iguais e recebeu 50 gramas da mistura de teste.Deliberadamente, não adicionamos botões a moedas e objetos similares relativamente grandes à nossa “sujeira” (como fazem os testadores de outras publicações), porque estamos convencidos de que o aspirador de pó robô não foi criado para coletar dinheiro ou outros objetos úteis do seu piso . Observe a composição do que você joga fora de um aspirador de pó convencional e entenderá quais recursos específicos são coletados no chão - nem todas as moedas.  Matérias-primas para a mistura "infernal".
Matérias-primas para a mistura "infernal".  Total de 50 gramas para "comer" o robô.
Total de 50 gramas para "comer" o robô.  Espalhe lama artificial uniformemente pela arena. Tudo está pronto para o teste. Assim, tendo no início 50 gramas de sujeira condicional, iniciamos o aspirador no ciclo de trabalho, após o qual pesamos tudo o que ele foi capaz de coletar e determinamos a porcentagem de poeira coletada. Faça imediatamente uma reserva de que a natureza desse teste depende do sistema de navegação do robô. Ele só pode se mover ao longo de uma trajetória caótica - nesse caso, ele recebe tempo para limpar 5 minutos. E pode ser dotado de uma visão mais avançada e, como resultado, limpar a área sequencialmente - então ela será limpa até que tudo esteja limpo. Ainda será mais rápido que 5 minutos, porque duas vezes o robô não passa pelo mesmo local.O segundo teste visa investigar a capacidade de um limpador inteligente para limpar a área máxima. É muito difícil conduzi-lo, por isso desenvolvemos um sistema de avaliação de "marcadores" para isso. Encontra-se no fato de que em quatro salas de comunicação (salas do apartamento) com uma área total de 63 metros quadrados. m) somos aleatoriamente, mas ao mesmo tempo dispersamos uniformemente pedaços de papel. Iniciamos o robô no ciclo de trabalho e depois contamos o número de pedaços de papel coletados. Como resultado, obtemos a porcentagem da área limpa com base no pressuposto de que, se o robô cobrir toda a área, ele coletará todas as peças e a probabilidade de passar apenas em pedaços de papel, sem remover a área inteira, tende a zero.
Espalhe lama artificial uniformemente pela arena. Tudo está pronto para o teste. Assim, tendo no início 50 gramas de sujeira condicional, iniciamos o aspirador no ciclo de trabalho, após o qual pesamos tudo o que ele foi capaz de coletar e determinamos a porcentagem de poeira coletada. Faça imediatamente uma reserva de que a natureza desse teste depende do sistema de navegação do robô. Ele só pode se mover ao longo de uma trajetória caótica - nesse caso, ele recebe tempo para limpar 5 minutos. E pode ser dotado de uma visão mais avançada e, como resultado, limpar a área sequencialmente - então ela será limpa até que tudo esteja limpo. Ainda será mais rápido que 5 minutos, porque duas vezes o robô não passa pelo mesmo local.O segundo teste visa investigar a capacidade de um limpador inteligente para limpar a área máxima. É muito difícil conduzi-lo, por isso desenvolvemos um sistema de avaliação de "marcadores" para isso. Encontra-se no fato de que em quatro salas de comunicação (salas do apartamento) com uma área total de 63 metros quadrados. m) somos aleatoriamente, mas ao mesmo tempo dispersamos uniformemente pedaços de papel. Iniciamos o robô no ciclo de trabalho e depois contamos o número de pedaços de papel coletados. Como resultado, obtemos a porcentagem da área limpa com base no pressuposto de que, se o robô cobrir toda a área, ele coletará todas as peças e a probabilidade de passar apenas em pedaços de papel, sem remover a área inteira, tende a zero.  Mediremos a porcentagem de área limpa através do número de pedaços de papel coletados. O terceiro exercício é superar barreiras. Muitos no apartamento ou casa têm peitoris ou forros decorativos no chão; portanto, é importante a capacidade de um aspirador de pó passar por eles. Como parte deste teste, verificaremos quão aceitáveis são nossos participantes.Bem, o quarto teste é mais um tipo de demonstração, no entanto, permite avaliar visualmente os processos físicos que ocorrem durante a operação do robô. Em outras palavras, tentamos olhar dentro do aspirador durante o desempenho de suas funções diretas, para descobrir se o pó é realmente absorvido. Fizemos isso convidando o robô a limpar o vidro. Foto e vídeo foram tirados da parte de trás do vidro, para que fique imediatamente claro se os céticos que consideram essa categoria de robôs são vassouras elétricas comuns.
Mediremos a porcentagem de área limpa através do número de pedaços de papel coletados. O terceiro exercício é superar barreiras. Muitos no apartamento ou casa têm peitoris ou forros decorativos no chão; portanto, é importante a capacidade de um aspirador de pó passar por eles. Como parte deste teste, verificaremos quão aceitáveis são nossos participantes.Bem, o quarto teste é mais um tipo de demonstração, no entanto, permite avaliar visualmente os processos físicos que ocorrem durante a operação do robô. Em outras palavras, tentamos olhar dentro do aspirador durante o desempenho de suas funções diretas, para descobrir se o pó é realmente absorvido. Fizemos isso convidando o robô a limpar o vidro. Foto e vídeo foram tirados da parte de trás do vidro, para que fique imediatamente claro se os céticos que consideram essa categoria de robôs são vassouras elétricas comuns. TESTE número 1. Investigamos a capacidade de coletar poluição
Passamos diretamente para testes práticos. Espalhamos 50 g de poluição em nossa arena, lançamos o robô para uma sessão de trabalho de 5 minutos e avaliamos os resultados.  No início da limpeza, você pode ver claramente como a sujeira é absorvida com confiança pelo aspirador de pó.
No início da limpeza, você pode ver claramente como a sujeira é absorvida com confiança pelo aspirador de pó.  Vista geral da superfície limpa após um ciclo de trabalho de 5 minutos. Antes de avaliar a qualidade da limpeza, direi algumas palavras sobre as impressões subjetivas do robô. A impressão geral é que ele realmente aspira. Isso se manifesta tanto no desaparecimento da poeira em tempo real, quanto em um som característico. E se você colocar a mão na parte de trás do aspirador durante a operação, poderá sentir claramente um fluxo de ar bastante poderoso - a palavra Tornado foi chamada por um motivo. O robô se move de maneira aleatória, mas essa aleatoriedade é muito simplificada e o dispositivo não apenas "cobre" rapidamente toda a área, mas também tenta passar adicionalmente pelas paredes. Ou seja, o aspirador de pó comportou-se racional e plenamente justificando seu perfil robótico.Bem, agora, de fato, sobre os resultados de seu trabalho. A foto mostra claramente que, em geral, a área principal é limpa, mas existem algumas dificuldades com os cantos. Eles são causados pela falta de vontade do Tornado em se aproximar das paredes. Como observamos na parte da visão geral, existem sensores de distância infravermelhos no para-choque dianteiro que protegem o aspirador de colidir com móveis e vários obstáculos, e pareceu-nos que eles foram configurados (ou o software foi escrito) de forma rude, com uma grande margem, o que faz com que o robô não alcance visivelmente para as paredes. Escovas laterais longas economizam, mas nem sempre. Como resultado, nós temos o que temos.Cuidadosa e minuciosamente despeje o “resultado do trabalho” em uma sacola e pese nas balanças, depois de transferi-las para o modo de não contabilizar os contêineres.
Vista geral da superfície limpa após um ciclo de trabalho de 5 minutos. Antes de avaliar a qualidade da limpeza, direi algumas palavras sobre as impressões subjetivas do robô. A impressão geral é que ele realmente aspira. Isso se manifesta tanto no desaparecimento da poeira em tempo real, quanto em um som característico. E se você colocar a mão na parte de trás do aspirador durante a operação, poderá sentir claramente um fluxo de ar bastante poderoso - a palavra Tornado foi chamada por um motivo. O robô se move de maneira aleatória, mas essa aleatoriedade é muito simplificada e o dispositivo não apenas "cobre" rapidamente toda a área, mas também tenta passar adicionalmente pelas paredes. Ou seja, o aspirador de pó comportou-se racional e plenamente justificando seu perfil robótico.Bem, agora, de fato, sobre os resultados de seu trabalho. A foto mostra claramente que, em geral, a área principal é limpa, mas existem algumas dificuldades com os cantos. Eles são causados pela falta de vontade do Tornado em se aproximar das paredes. Como observamos na parte da visão geral, existem sensores de distância infravermelhos no para-choque dianteiro que protegem o aspirador de colidir com móveis e vários obstáculos, e pareceu-nos que eles foram configurados (ou o software foi escrito) de forma rude, com uma grande margem, o que faz com que o robô não alcance visivelmente para as paredes. Escovas laterais longas economizam, mas nem sempre. Como resultado, nós temos o que temos.Cuidadosa e minuciosamente despeje o “resultado do trabalho” em uma sacola e pese nas balanças, depois de transferi-las para o modo de não contabilizar os contêineres.  O contêiner após o ciclo de serviço. A maior parte da poluição estava dentro.
O contêiner após o ciclo de serviço. A maior parte da poluição estava dentro.  Pequenos detritos em um compartimento pequeno e em um compartimento grande - grande e ... Também pequeno.
Pequenos detritos em um compartimento pequeno e em um compartimento grande - grande e ... Também pequeno.  Coletamos poeira para pesagem.
Coletamos poeira para pesagem. 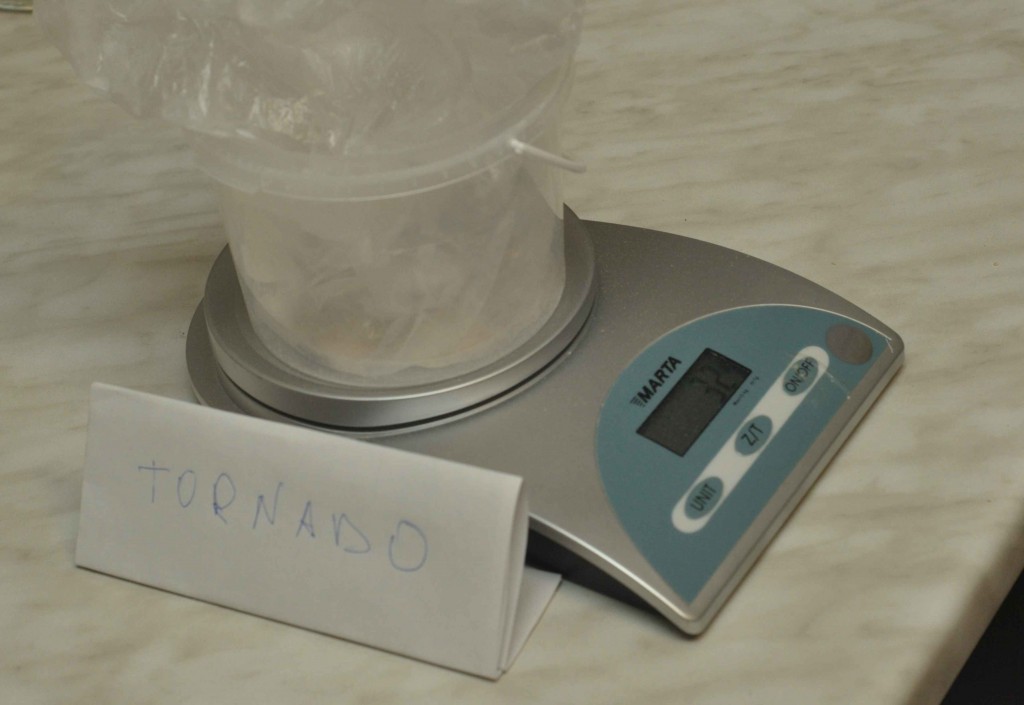 Temos 32 gramas, o que representa 64% da lama originalmente dispersa. Para sermos justos, desafiamos tudo em uma concha, que não teve a sorte de estar no ventre do robô e aumentou a massa total dos removidos. O resultado foi à primeira vista um pouco inesperado, mas lógico - 45 gramas. I.e. permanecem aproximadamente 5 gramas no dispositivo, apesar de terem sido varridos para fora do recipiente.
Temos 32 gramas, o que representa 64% da lama originalmente dispersa. Para sermos justos, desafiamos tudo em uma concha, que não teve a sorte de estar no ventre do robô e aumentou a massa total dos removidos. O resultado foi à primeira vista um pouco inesperado, mas lógico - 45 gramas. I.e. permanecem aproximadamente 5 gramas no dispositivo, apesar de terem sido varridos para fora do recipiente.  Inacabado. A contaminação permanece na escova, nos canais e nas superfícies internas. Acreditamos que é correto contar apenas o que é lavado do recipiente, uma vez que qualquer proprietário deste dispositivo na grande maioria dos casos gostaria de jogar fora a sujeira apenas do coletor de pó e não limpá-la de todo o aspirador após cada limpeza. Limpar o robô completamente, é claro, é necessário, mas você pode fazer isso uma vez em várias limpezas (por exemplo, uma vez por semana), para que apenas a captura do recipiente caia na mesa final.Foi aí que surgiu a emoção, que mencionei no início do artigo. Mas o que outros aspiradores de pó robóticos podem demonstrar?O primeiro após o Tornado chega ao "shell" Clever & Clean da série V. Em relação à navegação, funciona da mesma maneira - o modo de movimento é caótico. Os mesmos 50 gramas, 5 minutos de trabalho duro e ...
Inacabado. A contaminação permanece na escova, nos canais e nas superfícies internas. Acreditamos que é correto contar apenas o que é lavado do recipiente, uma vez que qualquer proprietário deste dispositivo na grande maioria dos casos gostaria de jogar fora a sujeira apenas do coletor de pó e não limpá-la de todo o aspirador após cada limpeza. Limpar o robô completamente, é claro, é necessário, mas você pode fazer isso uma vez em várias limpezas (por exemplo, uma vez por semana), para que apenas a captura do recipiente caia na mesa final.Foi aí que surgiu a emoção, que mencionei no início do artigo. Mas o que outros aspiradores de pó robóticos podem demonstrar?O primeiro após o Tornado chega ao "shell" Clever & Clean da série V. Em relação à navegação, funciona da mesma maneira - o modo de movimento é caótico. Os mesmos 50 gramas, 5 minutos de trabalho duro e ...  Visualmente, o robô coleta a poluição de maneira não tão confiante quanto o Tornado.
Visualmente, o robô coleta a poluição de maneira não tão confiante quanto o Tornado.  Embora o resultado tenha sido quase o mesmo, os cantos pareciam ainda mais limpos. Em princípio, visualmente na área principal, o resultado é o mesmo, os cantos são ainda mais arrumados. E já estávamos prontos para pesar o controle, pois o robô Clever & Clean nos apresentou uma surpresa inesperada. Quando um dos testadores levantou o aspirador, essa imagem apareceu aos nossos olhos.
Embora o resultado tenha sido quase o mesmo, os cantos pareciam ainda mais limpos. Em princípio, visualmente na área principal, o resultado é o mesmo, os cantos são ainda mais arrumados. E já estávamos prontos para pesar o controle, pois o robô Clever & Clean nos apresentou uma surpresa inesperada. Quando um dos testadores levantou o aspirador, essa imagem apareceu aos nossos olhos.  Acontece que, por algum motivo, o dispositivo não conseguiu sugar pedaços de papel. Externamente, eles desapareceram do chão após a passagem do aspirador, mas, como se vê, eles cuidadosamente recolheram a máquina e arrastaram-se para o fundo durante a limpeza. Além disso, parece estranho que este modelo também tenha uma bomba potente e o ar seja aspirado subjetivamente pelo contêiner, não menos intensamente do que o Tornado. E Clever & Clean vibra durante a limpeza e, em geral, como um aspirador de pó adulto de 2 quilowatts. Vamos tentar analisar e desvendar as causas do que está acontecendo no processo de teste nº 4, mas, por enquanto, pesamos o conteúdo do contêiner.
Acontece que, por algum motivo, o dispositivo não conseguiu sugar pedaços de papel. Externamente, eles desapareceram do chão após a passagem do aspirador, mas, como se vê, eles cuidadosamente recolheram a máquina e arrastaram-se para o fundo durante a limpeza. Além disso, parece estranho que este modelo também tenha uma bomba potente e o ar seja aspirado subjetivamente pelo contêiner, não menos intensamente do que o Tornado. E Clever & Clean vibra durante a limpeza e, em geral, como um aspirador de pó adulto de 2 quilowatts. Vamos tentar analisar e desvendar as causas do que está acontecendo no processo de teste nº 4, mas, por enquanto, pesamos o conteúdo do contêiner. 
 Série V após o trabalho. O arranjo em forma de V das escovas mostrou uma eficiência relativamente baixa. O resultado é 28 gramas, o que significa 56%. Obviamente, se não fosse o papel deixado no chão depois do trabalho, essa amostra de pensamento técnico poderia muito bem repetir o resultado do Tornado e, portanto, uma perda de 8%.Com o terceiro participante do teste, é mais difícil. O Iclebo Arte difere do Tornado e da série V em um sistema de navegação muito mais avançado. É equipado com uma câmera de vídeo, que, de acordo com o fabricante, permite fazer um mapa da sala e traçar uma rota, e é por isso que o robô pode se deslocar pelo apartamento não apenas no modo caótico, mas também em uma trajetória em zigue-zague, garantindo a ausência de áreas não limpas. O Olho Que Tudo Vê também ajuda a retornar à base com mais confiança. Portanto, pensamos que simplesmente tínhamos que verificar a eficácia do robô em dois modos: caótico e seqüencial.Vamos começar um por um. Vale ressaltar que, com esse projeto de teste, surge outra característica: o tempo de limpeza. Se no modo caótico, no caso geral, o robô for removido até que a bateria esteja vazia, no modo seqüencial, ele terminará quando remover tudo. Portanto, temos que conversar sobre o tempo.
Série V após o trabalho. O arranjo em forma de V das escovas mostrou uma eficiência relativamente baixa. O resultado é 28 gramas, o que significa 56%. Obviamente, se não fosse o papel deixado no chão depois do trabalho, essa amostra de pensamento técnico poderia muito bem repetir o resultado do Tornado e, portanto, uma perda de 8%.Com o terceiro participante do teste, é mais difícil. O Iclebo Arte difere do Tornado e da série V em um sistema de navegação muito mais avançado. É equipado com uma câmera de vídeo, que, de acordo com o fabricante, permite fazer um mapa da sala e traçar uma rota, e é por isso que o robô pode se deslocar pelo apartamento não apenas no modo caótico, mas também em uma trajetória em zigue-zague, garantindo a ausência de áreas não limpas. O Olho Que Tudo Vê também ajuda a retornar à base com mais confiança. Portanto, pensamos que simplesmente tínhamos que verificar a eficácia do robô em dois modos: caótico e seqüencial.Vamos começar um por um. Vale ressaltar que, com esse projeto de teste, surge outra característica: o tempo de limpeza. Se no modo caótico, no caso geral, o robô for removido até que a bateria esteja vazia, no modo seqüencial, ele terminará quando remover tudo. Portanto, temos que conversar sobre o tempo.  De fato, o aspirador de pó passou por toda a área destinada a ele para a limpeza. O tempo de limpeza foi de 1 minuto e 42 segundos, o que é quase três vezes mais rápido do que os robôs trabalhavam no modo caótico. Mas, ao mesmo tempo, o resultado do peso foi de 27 gramas, ou seja, 54%, comparável aos rivais limpando o chão visivelmente por mais tempo.
De fato, o aspirador de pó passou por toda a área destinada a ele para a limpeza. O tempo de limpeza foi de 1 minuto e 42 segundos, o que é quase três vezes mais rápido do que os robôs trabalhavam no modo caótico. Mas, ao mesmo tempo, o resultado do peso foi de 27 gramas, ou seja, 54%, comparável aos rivais limpando o chão visivelmente por mais tempo. 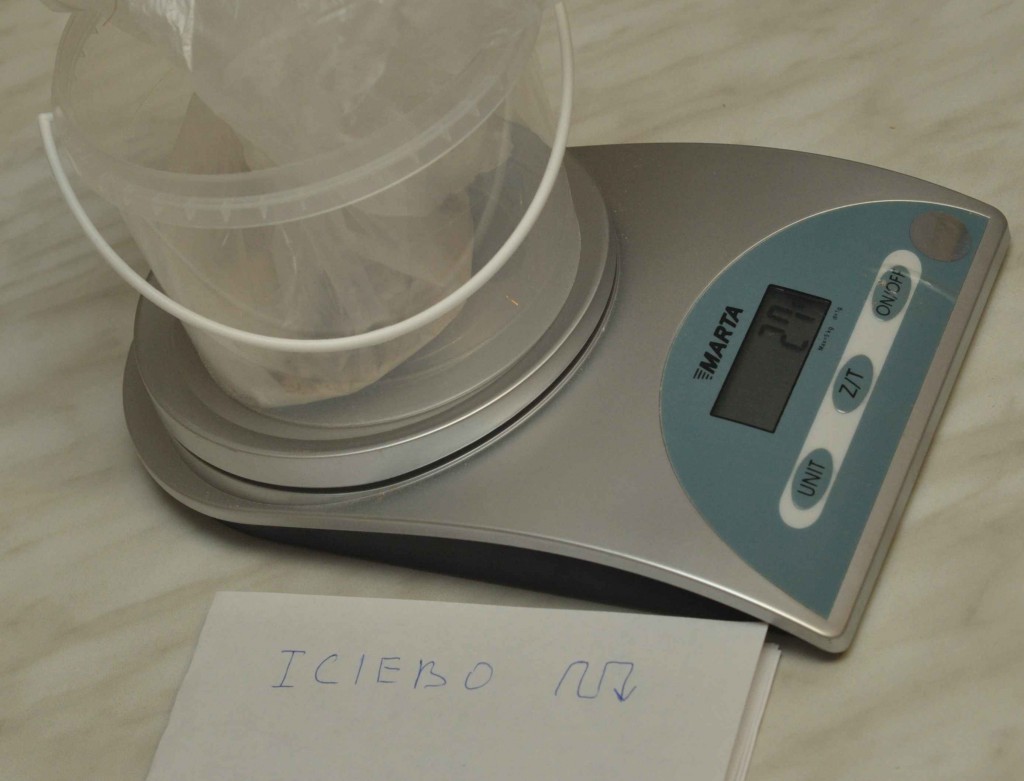 Para formar uma imagem mais completa dos recursos do Iclebo Arte, inicie-o nas mesmas condições que os outros participantes - em um modo caótico por 5 minutos.
Para formar uma imagem mais completa dos recursos do Iclebo Arte, inicie-o nas mesmas condições que os outros participantes - em um modo caótico por 5 minutos.  O resultado da limpeza do Iclebo Arte no caos parece muito convincente. A imagem com o resultado da limpeza parece impressionante. Não apenas tudo foi removido da área principal, mas o robô trabalhou o perímetro com muito cuidado e os cantos, onde havia muito pouca sujeira, foram afetados por escovas laterais muito macias que se encaixavam perfeitamente na superfície do piso. Isso ocorre apesar do aspirador ser praticamente silencioso e não ter um fluxo de ar tão potente na saída quanto os outros participantes. E o design não se vangloria de "megaprogressivo": apenas uma escova, sem turbinas e um contêiner sem nenhum recurso de design. Pese o resultado dos trabalhos.
O resultado da limpeza do Iclebo Arte no caos parece muito convincente. A imagem com o resultado da limpeza parece impressionante. Não apenas tudo foi removido da área principal, mas o robô trabalhou o perímetro com muito cuidado e os cantos, onde havia muito pouca sujeira, foram afetados por escovas laterais muito macias que se encaixavam perfeitamente na superfície do piso. Isso ocorre apesar do aspirador ser praticamente silencioso e não ter um fluxo de ar tão potente na saída quanto os outros participantes. E o design não se vangloria de "megaprogressivo": apenas uma escova, sem turbinas e um contêiner sem nenhum recurso de design. Pese o resultado dos trabalhos. 
 Iclebo Arte após a colheita. A relativa simplicidade do design, que não era adequada para mostrar um resultado decente na qualidade da limpeza, é claramente visível. E chega a 40 gramas, ou seja, 80% Um resultado muito interessante, que dá origem a um paradigma lógico: um aspirador de pó robô, que já passou várias vezes no mesmo local, limpa-o notavelmente melhor do que se o fizéssemos passar por ele. Mas isso funciona para uma área pequena e, em uma área grande, especialmente se consistir em várias salas separadas, o dispositivo corre o risco de não visitar qualquer lugar antes que a bateria se esgote e, como resultado, deixando áreas separadas por limpar. Verificaremos isso em nosso próximo experimento.No final da descrição dos resultados deste teste, observamos a característica geral do trabalho de todos os participantes. Como esperado, a tarefa mais difícil para os limpadores automáticos foi a coleta de poeira muito fina. Ela cai na microdureza da superfície do piso e é muito difícil removê-la. Além disso, forças eletrostáticas que atraem partículas para o chão impedem a varredura. Portanto, se você colocar a mão no chão após a limpeza, poderá descobrir facilmente que a superfície não está perfeitamente limpa.
Iclebo Arte após a colheita. A relativa simplicidade do design, que não era adequada para mostrar um resultado decente na qualidade da limpeza, é claramente visível. E chega a 40 gramas, ou seja, 80% Um resultado muito interessante, que dá origem a um paradigma lógico: um aspirador de pó robô, que já passou várias vezes no mesmo local, limpa-o notavelmente melhor do que se o fizéssemos passar por ele. Mas isso funciona para uma área pequena e, em uma área grande, especialmente se consistir em várias salas separadas, o dispositivo corre o risco de não visitar qualquer lugar antes que a bateria se esgote e, como resultado, deixando áreas separadas por limpar. Verificaremos isso em nosso próximo experimento.No final da descrição dos resultados deste teste, observamos a característica geral do trabalho de todos os participantes. Como esperado, a tarefa mais difícil para os limpadores automáticos foi a coleta de poeira muito fina. Ela cai na microdureza da superfície do piso e é muito difícil removê-la. Além disso, forças eletrostáticas que atraem partículas para o chão impedem a varredura. Portanto, se você colocar a mão no chão após a limpeza, poderá descobrir facilmente que a superfície não está perfeitamente limpa.  Após uma limpeza simples, o aspirador deixa as micropartículas por limpar, que, no entanto, se você varrer manualmente o chão com uma vassoura, elas também permanecerão onde estavam.É possível obter melhor qualidade de limpeza dos robôs? Acontece que você pode. É suficiente instalar um bico no aspirador com um pano de microfibra umedecido com água antes do ciclo de trabalho, se for, é claro, previsto pelo projeto e pelo escopo de entrega. Graças às fibras de tamanho nano, esse guardanapo absorve tudo o que a escova do aspirador não conseguiu remover e chupa a bomba de vácuo.
Após uma limpeza simples, o aspirador deixa as micropartículas por limpar, que, no entanto, se você varrer manualmente o chão com uma vassoura, elas também permanecerão onde estavam.É possível obter melhor qualidade de limpeza dos robôs? Acontece que você pode. É suficiente instalar um bico no aspirador com um pano de microfibra umedecido com água antes do ciclo de trabalho, se for, é claro, previsto pelo projeto e pelo escopo de entrega. Graças às fibras de tamanho nano, esse guardanapo absorve tudo o que a escova do aspirador não conseguiu remover e chupa a bomba de vácuo.  Um bico com um pano úmido de microfibra melhora muito a coleção de poeira fina.
Um bico com um pano úmido de microfibra melhora muito a coleção de poeira fina.  E após uma limpeza tão prolongada, não há mais vestígios do piso. Portanto, se você deseja obter a máxima limpeza comparável com o mesmo resultado que após a limpeza com água, certifique-se de usar guardanapos, caso sejam fornecidos pelo design do aspirador de pó robô.
E após uma limpeza tão prolongada, não há mais vestígios do piso. Portanto, se você deseja obter a máxima limpeza comparável com o mesmo resultado que após a limpeza com água, certifique-se de usar guardanapos, caso sejam fornecidos pelo design do aspirador de pó robô. TESTE número 2. ROBÔ TOMA TODO O APARTAMENTO
Este teste não é tão interessante do ponto de vista visual, no entanto, permite que você tire imediatamente uma conclusão sobre a perfeição de navegação e algorítmica do robô, o que afeta seriamente o indicador integral (total) do desempenho do robô na limpeza da sala.By the way, sobre o indicador integral. Se aceitarmos a suposição de que a poeira é distribuída uniformemente por todo o apartamento (e esse é o caso na maioria dos quartos, se estivermos falando de poeira doméstica comum, e não de poluição local ou predial específica), a eficiência total de limpeza do robô pode ser estimada multiplicando a porcentagem de poeira coletada pela porcentagem área coberta. I.e. acontece que, sabendo o quanto o aspirador de pó basicamente coleta do pó no chão em termos percentuais e tendo os dados de qual fração da área limpa sem passar, multiplicando um pelo outro, obtemos o percentual de poeira coletado de todos os disponíveis no apartamento.Então, espalhamos 30 pequenos pedaços de papel (os chamaremos de marcadores) em três salas e convidamos cada aspirador a coletá-los. Para a pureza do experimento, fizemos todos os participantes do teste duas vezes e calculamos a média dos resultados das duas corridas. Aqui está o que aconteceu.1. Série V inteligente e limpa - 15 marcadores de 30 a 50%;2. Iclebo Arte (modo seqüencial) - 28 marcadores de 30 a 93,3%;3. Iclebo Arte (modo caótico) - 25 marcadores de 30 - 83,3%;4. e.ziclean TORNADO - 21 marcadores de 30 a 70%.No total, obtemos a seguinte distribuição de resultados pelo indicador integral (o indicador máximo possível é a unidade).1. Iclebo Arte (modo seqüencial) - 0,504 ou 50,4% da poeira presente no apartamento no momento da limpeza;2. Iclebo Arte (modo caótico) - 0,666 ou 66,6% da poeira presente no apartamento no momento da limpeza;3. e.ziclean TORNADO - 0,448 ou 44,8% da poeira presente no apartamento no momento da limpeza;4. Inteligente e limpo, série V - 0,28 ou 28% da poeira presente no apartamento no momento da limpeza.À primeira vista, não muito. No entanto, se você observar essa situação de maneira abrangente, tudo acabará não sendo tão ruim e até bom. Afinal, em primeiro lugar - este é um robô removido e você praticamente não gasta seu tempo pessoal nesse procedimento. E segundo: devido ao fato de a limpeza ser feita para você, ela pode e deve ser feita diariamente. A maioria dos modelos de aspiradores de pó automáticos (com exceção dos mais simples e mais baratos) oferece suporte à limpeza programada e pode fazê-lo mesmo quando você não estiver em casa. Se você estiver em casa - o robô não precisará de um arranque e começará a se limpar. Durante a limpeza diária, o pó recém-emergente não terá tempo para ser esmagado no chão e será imediatamente limpo com um aspirador de pó. Dessa forma, o robô reduzirá seriamente sua quantidade durante todo o período entre limpezas úmidas e, como resultado,você respirará ar limpo o suficiente esse tempo todo. No entanto, deixaremos as principais conclusões sobre a eficiência geral dos aspiradores de pó robóticos até a seção com o mesmo nome em nosso artigo, ilustraremos eles graficamente no mesmo local, mas, por enquanto, prosseguimos para o próximo teste. TESTE número 3. SUPERAÇÃO DE BARREIRAS
Para avaliar a perviedade dos robôs, foram utilizadas ripas de madeira de diferentes espessuras e formas retangulares, com altura de 7 mm, 14 mm, 18 mm e 20 mm. Neste estudo, não há truques e sutilezas específicos - o robô supera a barreira da altura proposta ou não supera, portanto não vou escrever muito, mas simplesmente fornecer os resultados do teste.  Um tornado foi capaz de superar um limiar de apenas 7 mm de altura.
Um tornado foi capaz de superar um limiar de apenas 7 mm de altura.  A inteligente e limpa série V também não podia se orgulhar de algo extraordinário - os mesmos 7 mm.
A inteligente e limpa série V também não podia se orgulhar de algo extraordinário - os mesmos 7 mm.  Mas o Iclebo, graças a um modo especial de superação de obstáculos (ativado por padrão e pode ser desativado à força), foi apenas um pouco incapaz de atingir a altura máxima que planejamos verificar na estrutura deste teste (20 mm). Claro 18 mm. Em poucas palavras, os robôs percebem um obstáculo de diferentes maneiras. Há uma sensação de que os sensores da Clever & clean e Tornado estão configurados para alta sensibilidade e, em qualquer situação de emergência, que pode ser atribuída a uma barreira acima de 7 mm, eles ficam "assustados" - eles começam a tremer para frente e para trás, girar e eventualmente sair. O Iclebo, nesse sentido, é muito mais "destemido" e ataca de maneira muito agressiva os obstáculos que caem ao volante quando o modo da empresa é ativado. Embora 7 mm sejam uma altura raramente excedida pela grande maioria dos revestimentos que ocultam a diferença entre a transição do piso de uma sala para o piso da sala de outra. Portanto, as capacidades demonstradas pelos participantes em nosso teste devem ser suficientes para um movimento confiante entre as salas. Bem, no caso de Iclebo, você não precisa se preocupar com soleiras.
Mas o Iclebo, graças a um modo especial de superação de obstáculos (ativado por padrão e pode ser desativado à força), foi apenas um pouco incapaz de atingir a altura máxima que planejamos verificar na estrutura deste teste (20 mm). Claro 18 mm. Em poucas palavras, os robôs percebem um obstáculo de diferentes maneiras. Há uma sensação de que os sensores da Clever & clean e Tornado estão configurados para alta sensibilidade e, em qualquer situação de emergência, que pode ser atribuída a uma barreira acima de 7 mm, eles ficam "assustados" - eles começam a tremer para frente e para trás, girar e eventualmente sair. O Iclebo, nesse sentido, é muito mais "destemido" e ataca de maneira muito agressiva os obstáculos que caem ao volante quando o modo da empresa é ativado. Embora 7 mm sejam uma altura raramente excedida pela grande maioria dos revestimentos que ocultam a diferença entre a transição do piso de uma sala para o piso da sala de outra. Portanto, as capacidades demonstradas pelos participantes em nosso teste devem ser suficientes para um movimento confiante entre as salas. Bem, no caso de Iclebo, você não precisa se preocupar com soleiras. TESTE número 4. LIMPEZA, VISTA INTERIOR
A parte mais espetacular do nosso programa de testes, é claro, economizamos para o final. Fazemos tudo como no teste nº 1, com a única diferença de que a ação ocorre no vidro.  A mesma poluição, aspiradores de pó também. Mas eles são removidos no copo.
A mesma poluição, aspiradores de pó também. Mas eles são removidos no copo.  As fotos não transmitem bem a dinâmica. Mas o vídeo mostra claramente como a sujeira desaparece sem deixar vestígios no útero do carro. A sucção é muito ativa.
As fotos não transmitem bem a dinâmica. Mas o vídeo mostra claramente como a sujeira desaparece sem deixar vestígios no útero do carro. A sucção é muito ativa.  O trabalho de Icleabo no vidro parece ainda mais espetacular do que no chão. O raspador de borracha macia não deixa chance de poeira. A sujeira desaparece por dentro tão ativamente quanto o Tornado.
O trabalho de Icleabo no vidro parece ainda mais espetacular do que no chão. O raspador de borracha macia não deixa chance de poeira. A sujeira desaparece por dentro tão ativamente quanto o Tornado.  Mas a série V inteligente e limpa em vidro expôs a razão da surpresa desde o primeiro teste. Não há absolutamente nada a acrescentar sobre os aspiradores coreanos e franceses, eles confirmaram visualmente a qualidade de seu trabalho - eles efetivamente varrem e absorvem. E na série V da Clever & clean vale a pena parar com mais detalhes.Um modelo de aspirador de pó com um arranjo de escovas em forma de V no vidro repetiu o mesmo truque que no chão. Depois de passar por toda a área de vidro, deixe o robô com alguma dificuldade, mas conseguiu aspirar pequenas partículas, e as grandes, como pedaços de papel, permaneceram embaixo e arrastaram até o final da limpeza. Vamos tentar entender por que isso acontece.Em nossa opinião, o principal problema é um pequeno erro de cálculo construtivo, que surgiu como resultado do arranjo não padrão das escovas principais e do recipiente de coleta de poeira, que consiste em dois compartimentos (e o ar da bomba é aspirado por apenas um). Devido ao ângulo agudo entre os raspadores no centro, uma lacuna é formada ao longo da direção do movimento do robô, na qual caem grandes contaminantes. Contribua com isso e com as escovas laterais de alta qualidade, varrendo literalmente tudo exatamente nesta parte central, que vem no caminho de um aspirador de pó. E então esse lixo não tem para onde ir, uma vez que está bloqueado por um terceiro raspador transversal, e o lixo não é capaz de penetrar na fenda estreita à sua frente.
Mas a série V inteligente e limpa em vidro expôs a razão da surpresa desde o primeiro teste. Não há absolutamente nada a acrescentar sobre os aspiradores coreanos e franceses, eles confirmaram visualmente a qualidade de seu trabalho - eles efetivamente varrem e absorvem. E na série V da Clever & clean vale a pena parar com mais detalhes.Um modelo de aspirador de pó com um arranjo de escovas em forma de V no vidro repetiu o mesmo truque que no chão. Depois de passar por toda a área de vidro, deixe o robô com alguma dificuldade, mas conseguiu aspirar pequenas partículas, e as grandes, como pedaços de papel, permaneceram embaixo e arrastaram até o final da limpeza. Vamos tentar entender por que isso acontece.Em nossa opinião, o principal problema é um pequeno erro de cálculo construtivo, que surgiu como resultado do arranjo não padrão das escovas principais e do recipiente de coleta de poeira, que consiste em dois compartimentos (e o ar da bomba é aspirado por apenas um). Devido ao ângulo agudo entre os raspadores no centro, uma lacuna é formada ao longo da direção do movimento do robô, na qual caem grandes contaminantes. Contribua com isso e com as escovas laterais de alta qualidade, varrendo literalmente tudo exatamente nesta parte central, que vem no caminho de um aspirador de pó. E então esse lixo não tem para onde ir, uma vez que está bloqueado por um terceiro raspador transversal, e o lixo não é capaz de penetrar na fenda estreita à sua frente.  , , , , , .
, , , , , .  , . , «» , , , . No final, o que acontece está acontecendo. Se algo mais maciço do que poeira ou migalhas atrapalhar o robô, pode muito bem se tornar um obstáculo que impede a absorção de poeira fina na fenda do coletor de pó. Ao mesmo tempo, deve-se reconhecer que a redução da área de fluxo através da qual o ar é aspirado acelera o movimento desse ar, o que acaba levando o lixo leve para dentro do recipiente. Portanto, o aspirador mostrou um resultado muito semelhante ao do robô TORNADO.A propósito, a Clever & clean também possui um aspirador da série Z com um layout tradicional e um arranjo transversal da escova principal na linha de modelos. Em nosso próximo teste de aspiradores de pó robóticos, definitivamente verificaremos o quão bem ele será limpo.
, . , «» , , , . No final, o que acontece está acontecendo. Se algo mais maciço do que poeira ou migalhas atrapalhar o robô, pode muito bem se tornar um obstáculo que impede a absorção de poeira fina na fenda do coletor de pó. Ao mesmo tempo, deve-se reconhecer que a redução da área de fluxo através da qual o ar é aspirado acelera o movimento desse ar, o que acaba levando o lixo leve para dentro do recipiente. Portanto, o aspirador mostrou um resultado muito semelhante ao do robô TORNADO.A propósito, a Clever & clean também possui um aspirador da série Z com um layout tradicional e um arranjo transversal da escova principal na linha de modelos. Em nosso próximo teste de aspiradores de pó robóticos, definitivamente verificaremos o quão bem ele será limpo. CONCLUSÕES GERAIS
Bem, para resumir com base em nossa pesquisa.Primeiro, chegamos a uma conclusão geral sobre a eficácia e a viabilidade do uso de aspiradores automáticos como um dos fenômenos dos eletrodomésticos. Para avaliar a contribuição do aspirador de pó para a limpeza do apartamento em que ele funcionará, precisamos de um pouco de matemática, a saber, descrevemos o modelo matemático da “circulação de sujeira” na sala e o exibimos em forma gráfica.Ao elaborar o modelo, é necessário aceitar as condições iniciais. Leve-os o mais próximo possível do real e do mais comum.1. Como regra geral, limpamos o final de semana e, provavelmente, a maioria dos leitores limpa seus apartamentos e casas todo fim de semana, portanto, o período entre a limpeza é de 7 dias.2. Para simplificar a visualização, assumimos que todos os dias, durante a vida normal em condições naturais, novos 10 gramas de poeira caem no chão e se espalham uniformemente pela sala. Enfatizo que, ao construir leis gerais, é importante não a quantidade específica de poeira (elas são diferentes para todos), mas as proporções relativas que mostram o efeito do uso do robô, para que, condicionalmente, aumentemos diariamente a poeira de 10 g.3. O aspirador funcionará diariamente durante toda a semana. Ao mesmo tempo, suponha que antes do primeiro lançamento, o piso esteja completamente limpo e não haja poeira nele.Considere o princípio de compilar um modelo usando o exemplo do personagem principal do nosso teste - TORNADO. Posteriormente, construímos diagramas para todos os participantes do teste. Com base nas condições aceitas, teremos que, no primeiro dia, apareceram 10 g de poeira e o aspirador de pó robô coletou-o dentro do seu indicador de eficiência integral (44,8%), a quantidade de poeira restante no chão pode ser determinada pela fórmula:G1 = (1 -Kief) x G diariamente = (1-0,448) x 10 = 5,52 gAssim, no dia seguinte, o volume diário será adicionado à poeira deixada após a limpeza de ontem e tudo isso será removido pelo robô novamente dentro de suas capacidades. No total, após o segundo dia, a poeira permanecerá na seguinte quantidade:Gd2 = (1-Kief) x (Gd1 + G diariamente) = (1-0,448) x (5,52 + 10) = 8,57 g.Nos dias restantes da semana:Gd3 = (1-Kief) x (Gd2 + G diariamente) = (1-0,448) x (8,57 + 10) = 10,25 g;Gd4 = (1-Kief) x (Gd3 + G diariamente) = (1-0,448) x (10,25 + 10) = 11,18 g;Gd5 = (1-Kief) x (Gd4 + G diariamente) = (1-0,448) x (11,18 + 10) = 11,69 g;Gd6 = (1-Kief) x (Gd5 + G diariamente) = (1-0,448) x (11,69 + 10) = 11,97 g;Gd7 = (1-Kief) x (Gd6 + G diariamente) = (1-0,448) x (11,97 + 10) = 12,13 g;Para outros participantes do teste, a situação é a seguinte.O Iclebo, trabalhando no modo seqüencial, deixará 9,8 g de contaminantes durante toda a semana, em modo caótico por cerca de 5 g, e a série V inteligente e limpa não removerá 23,13 g por semana.Acontece um resultado muito interessante. Se o aspirador de pó robô não for usado, é claro que, com uma adição diária de 10 g, 70 g de poeira estarão na sala até o final da semana. Se você usa um aspirador de pó robô TORNADO todos os dias, após 7 dias haverá apenas 12,13 g de poeira, o que é exatamente 5,8 vezes menos! E se estiver em porcentagem, em uma semana o robô coletará quase 83% de toda a poeira que apareceu. E o aspirador Iclebo que apresentou o melhor resultado conseguirá absorver quase 93% de tudo o que se deposita no chão em forma de poeira em sete dias, ou seja, será 14 vezes menor (!).Há motivos para pensar. Afinal, movendo-se pelo apartamento, levantamos a poeira com os pés no ar e subseqüentemente respiramos durante os dias em que as instalações não são limpas. E inalar não é muito útil. Para entender isso, basta digitar a consulta "composição do pó doméstico" em qualquer sistema de pesquisa na Internet e ler os materiais de pesquisa dos cientistas sobre este tópico.Para maior clareza, construiremos um diagrama geral com base nos resultados que levam em consideração os resultados de todos os participantes do teste.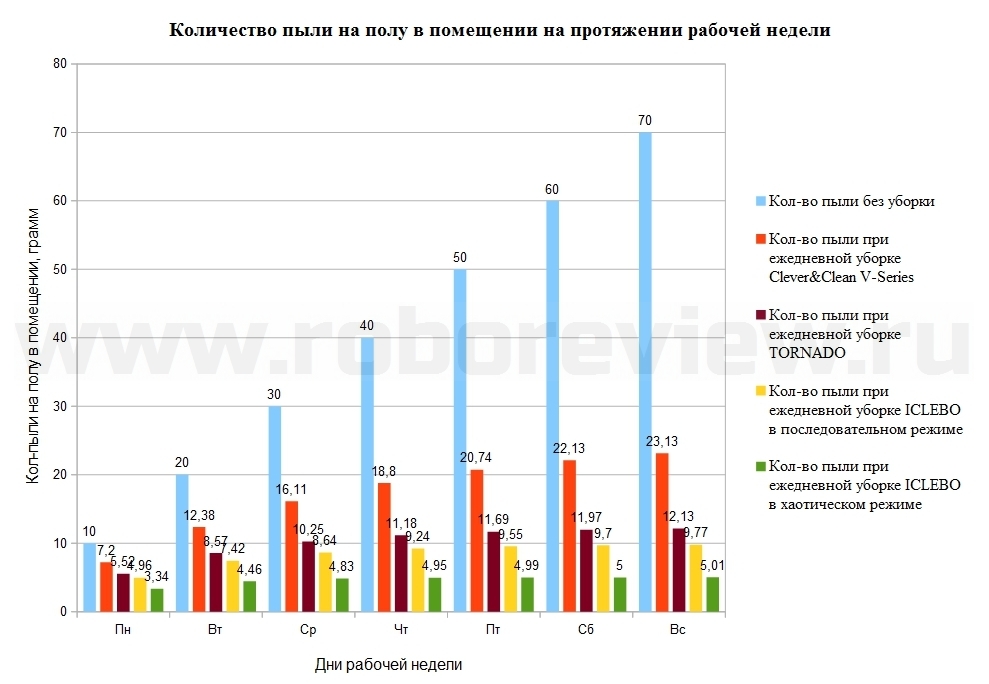 Não posso deixar de fazer uma pequena observação sobre os resultados do robô coreano nos modos seqüencial e caótico. De acordo com os resultados de nossa pesquisa, o regime caótico acabou sendo melhor do que o seqüencial em termos de pureza. No entanto, isso é verdade para nossas condições específicas: quatro quartos com uma área de 25, 10, 13 e 15 metros quadrados. m) Um regime caótico é caracterizado por estar subordinado à teoria da probabilidade. A complexidade dos algoritmos de controle elimina, em certa medida, os riscos de não visitar algum lugar, mas sempre há uma chance. Durante o teste, o aspirador não entrou na sala mais pequena (10 m²), o que resultou em 83% no resultado final do revestimento. Nos quartos restantes, ele colecionou todos os marcadores. Mas, em algum próximo ciclo de limpeza, ele pode não ter chamado uma sala grande - então o resultado teria sido pior. Então, tudo depende da área das instalações.Se as áreas são grandes e existem várias salas, o modo caótico pode ser visivelmente menos eficaz que o seqüencial, o que garante uma orientação muito mais confiante do aspirador, o que contribui para uma "cobertura" mais completa durante a limpeza.Agora, tendo os dados obtidos no processo de nossa pesquisa, podemos responder objetivamente às perguntas colocadas no início deste artigo.O aspirador de pó robô é uma "vassoura elétrica" ou um aspirador de pó real?Com base na análise das estruturas, podemos concluir que, é claro, existem algumas características de uma vassoura elétrica nela, mas, no entanto, esses robôs aspiram e coletam muito bem a poeira. Em primeiro lugar, o resultado final é importante e, sob certas condições, pode ser comparável ao resultado obtido com um aspirador de pó potente convencional. Ele limpa em qualquer lugar ou deixa grandes áreas por limpar?A resposta a esta pergunta é bem ilustrada pelo nosso teste número 2. Aqui depende muito do sistema de navegação do robô. Quanto mais perfeita for, menor será a área por limpar., ?. - , - . , 70 95 % , . , , .?, . , , — .?, . - , . . , , — . , 70-90% , , , . Esperamos que, depois de ler as conclusões gerais, você já tenha dissipado as dúvidas sobre os benefícios de um limpador automático e a necessidade de ter um em cada domicílio. No entanto, a questão permanece "o que comprar"?Se você escolher entre os participantes do teste, a escolha mais incontestável é o modelo Iclebo Arte do fabricante coreano. O segundo nas recomendações, como você pode imaginar, é o TORNADO francês. E o robô da série V inteligente e limpo fecha os três primeiros com os mais modestos indicadores de eficiência de limpeza. No entanto, um ponto importante é o custo do dispositivo nas lojas. E se você calcular o custo unitário da unidade de eficiência da série V, parece que é uma compra bastante razoável. Não é tão pior quanto é mais barato - a diferença de preço em comparação com a Arte é quase dupla.Em geral, a escolha de qualquer dispositivo de alta tecnologia é sempre difícil e é determinada por vários fatores. Portanto, darei várias considerações sobre a eficiência do dispositivo, dependendo dos recursos de design. Estes são essencialmente os resultados da própria batalha de conceitos expressada no início do artigo.
Não posso deixar de fazer uma pequena observação sobre os resultados do robô coreano nos modos seqüencial e caótico. De acordo com os resultados de nossa pesquisa, o regime caótico acabou sendo melhor do que o seqüencial em termos de pureza. No entanto, isso é verdade para nossas condições específicas: quatro quartos com uma área de 25, 10, 13 e 15 metros quadrados. m) Um regime caótico é caracterizado por estar subordinado à teoria da probabilidade. A complexidade dos algoritmos de controle elimina, em certa medida, os riscos de não visitar algum lugar, mas sempre há uma chance. Durante o teste, o aspirador não entrou na sala mais pequena (10 m²), o que resultou em 83% no resultado final do revestimento. Nos quartos restantes, ele colecionou todos os marcadores. Mas, em algum próximo ciclo de limpeza, ele pode não ter chamado uma sala grande - então o resultado teria sido pior. Então, tudo depende da área das instalações.Se as áreas são grandes e existem várias salas, o modo caótico pode ser visivelmente menos eficaz que o seqüencial, o que garante uma orientação muito mais confiante do aspirador, o que contribui para uma "cobertura" mais completa durante a limpeza.Agora, tendo os dados obtidos no processo de nossa pesquisa, podemos responder objetivamente às perguntas colocadas no início deste artigo.O aspirador de pó robô é uma "vassoura elétrica" ou um aspirador de pó real?Com base na análise das estruturas, podemos concluir que, é claro, existem algumas características de uma vassoura elétrica nela, mas, no entanto, esses robôs aspiram e coletam muito bem a poeira. Em primeiro lugar, o resultado final é importante e, sob certas condições, pode ser comparável ao resultado obtido com um aspirador de pó potente convencional. Ele limpa em qualquer lugar ou deixa grandes áreas por limpar?A resposta a esta pergunta é bem ilustrada pelo nosso teste número 2. Aqui depende muito do sistema de navegação do robô. Quanto mais perfeita for, menor será a área por limpar., ?. - , - . , 70 95 % , . , , .?, . , , — .?, . - , . . , , — . , 70-90% , , , . Esperamos que, depois de ler as conclusões gerais, você já tenha dissipado as dúvidas sobre os benefícios de um limpador automático e a necessidade de ter um em cada domicílio. No entanto, a questão permanece "o que comprar"?Se você escolher entre os participantes do teste, a escolha mais incontestável é o modelo Iclebo Arte do fabricante coreano. O segundo nas recomendações, como você pode imaginar, é o TORNADO francês. E o robô da série V inteligente e limpo fecha os três primeiros com os mais modestos indicadores de eficiência de limpeza. No entanto, um ponto importante é o custo do dispositivo nas lojas. E se você calcular o custo unitário da unidade de eficiência da série V, parece que é uma compra bastante razoável. Não é tão pior quanto é mais barato - a diferença de preço em comparação com a Arte é quase dupla.Em geral, a escolha de qualquer dispositivo de alta tecnologia é sempre difícil e é determinada por vários fatores. Portanto, darei várias considerações sobre a eficiência do dispositivo, dependendo dos recursos de design. Estes são essencialmente os resultados da própria batalha de conceitos expressada no início do artigo.- Os dispositivos com a escova principal localizada perpendicular à linha de direção do movimento têm a melhor eficiência. Qualquer experimento com o arranjo angular das escovas reduzirá a quantidade de poeira coletada.
- É desejável que o ar da bomba de sucção de poeira passe pela escova principal - isso contribui para uma melhor coleta de poeira.
- Uma escova principal adicional nem sempre oferece uma vantagem em termos de quantidade de poeira coletada, no entanto, complica significativamente o design.
- , , , .
- , . , Ni-Mh , , Li-ion, .
- Preferidos são os modelos que permitem programar um horário de limpeza. Essa função simplifica ao máximo o diálogo do proprietário com o dispositivo e, sem esforços adicionais, garante a operação diária de seus robôs, o que garante a divulgação de todo o potencial do aspirador de pó robô para limpar as áreas a ele confiadas.
E, de qualquer maneira, escolha nossos queridos leitores, com base nas preferências de gosto, na maior eficiência do dispositivo e em suas capacidades materiais. Source: https://habr.com/ru/post/pt388155/
All Articles