Interferência nos sistemas globais de navegação por satélite. Continuação
Para minha surpresa, o artigo anterior foi recebido calorosamente. Hoje continuamos a considerar esse problema. Medidas anti-interferênciaNa navegação, o nível de ruído sempre excede o nível do sinal. Para determinar o nível de interferência (relação interferência / sinal, relação J / S), considera-se quanto o ruído excede o nível de ruído. A seguir, são apresentados métodos para aumentar a imunidade ao ruído dos receptores, juntamente com a máxima interferência contra a qual esses métodos são eficazes.
Medidas anti-interferênciaNa navegação, o nível de ruído sempre excede o nível do sinal. Para determinar o nível de interferência (relação interferência / sinal, relação J / S), considera-se quanto o ruído excede o nível de ruído. A seguir, são apresentados métodos para aumentar a imunidade ao ruído dos receptores, juntamente com a máxima interferência contra a qual esses métodos são eficazes. 1. O aumento da largura de banda do sinal (até 10 dB);2. Aumento da potência do transmissor na nave espacial (até 20 dB);3. Integração de receptores de navegação (até 30 dB);4. O uso de filtros de hardware digital (até 40 dB);5. O uso da correção tempo-frequência (até 50 dB);6. Uso de métodos de antena (até 70 dB);Os dois primeiros métodos dependem do sinal usado pela sonda e não podem ser alterados da Terra após o lançamento. Os métodos de antena complicam bastante e aumentam o custo do equipamento de consumo, o que reduz drasticamente o número possível de usuários.
1. O aumento da largura de banda do sinal (até 10 dB);2. Aumento da potência do transmissor na nave espacial (até 20 dB);3. Integração de receptores de navegação (até 30 dB);4. O uso de filtros de hardware digital (até 40 dB);5. O uso da correção tempo-frequência (até 50 dB);6. Uso de métodos de antena (até 70 dB);Os dois primeiros métodos dependem do sinal usado pela sonda e não podem ser alterados da Terra após o lançamento. Os métodos de antena complicam bastante e aumentam o custo do equipamento de consumo, o que reduz drasticamente o número possível de usuários. A integração dos receptores de navegação não aumenta significativamente a imunidade a ruídos do receptor de navegação. Isso se deve ao fato de os sistemas de navegação inercial (RNAs) não serem afetados pela interferência de rádio e terem alta precisão de medição no curto prazo. No entanto, o erro na determinação dos parâmetros de navegação se acumula ao longo do tempo e requer correção do GNSS. O diagrama acima mostra onde, usando o filtro Kalman, o receptor de navegação está integrado.O uso da correção tempo-frequência (supressão de interferência no domínio da frequência) é um método eficaz, mas é muito difícil de implementar em tempo real. Isso ocorre porque a execução desse método deve ser realizada usando um microcomputador em paralelo com a operação de loops de rastreamento, discriminadores, solução de problemas de navegação e velocidade e resolução de ambiguidades ao trabalhar no modo RTK. Com base nisso, para poder suprimir a interferência no domínio da frequência, é necessário ter uma reserva significativa de poder computacional que não estará envolvido na ausência de interferência.Duas categorias são distinguidas entre os filtros digitais:1. Filtros recursivos (com resposta infinita ao impulso);2. Filtros não recursivos (com resposta de impulso finito).O que escolher?A questão da escolha é altamente dependente do hardware disponível. Ótimos em termos de complexidade de implementação e custo do dispositivo final são os filtros digitais. Nos receptores de navegação, você pode encontrar os filtros IIR e FIR. Os filtros FIR têm a vantagem de poder criar um filtro com uma resposta de fase linear e, como resultado, um atraso constante do grupo. Isso significa que diferentes componentes de frequência serão atrasados pelo mesmo número de ciclos de clock ao passar pelo filtro. No entanto, usando um filtro IIR, uma janela de entalhe muito mais estreita e uma faixa de transição geralmente menor podem ser obtidas com a mesma ordem de filtro.Como isso funciona?Para que os algoritmos de supressão de interferência funcionem, são necessárias informações sobre o ambiente de interferência. A detecção de interferência de banda estreita é convenientemente realizada no domínio da frequência, enquanto o comportamento de pseudo-atrasos, potencial energético e viés de Doppler para a presença de saltos deve ser analisado para detectar ataques de falsificação.
A integração dos receptores de navegação não aumenta significativamente a imunidade a ruídos do receptor de navegação. Isso se deve ao fato de os sistemas de navegação inercial (RNAs) não serem afetados pela interferência de rádio e terem alta precisão de medição no curto prazo. No entanto, o erro na determinação dos parâmetros de navegação se acumula ao longo do tempo e requer correção do GNSS. O diagrama acima mostra onde, usando o filtro Kalman, o receptor de navegação está integrado.O uso da correção tempo-frequência (supressão de interferência no domínio da frequência) é um método eficaz, mas é muito difícil de implementar em tempo real. Isso ocorre porque a execução desse método deve ser realizada usando um microcomputador em paralelo com a operação de loops de rastreamento, discriminadores, solução de problemas de navegação e velocidade e resolução de ambiguidades ao trabalhar no modo RTK. Com base nisso, para poder suprimir a interferência no domínio da frequência, é necessário ter uma reserva significativa de poder computacional que não estará envolvido na ausência de interferência.Duas categorias são distinguidas entre os filtros digitais:1. Filtros recursivos (com resposta infinita ao impulso);2. Filtros não recursivos (com resposta de impulso finito).O que escolher?A questão da escolha é altamente dependente do hardware disponível. Ótimos em termos de complexidade de implementação e custo do dispositivo final são os filtros digitais. Nos receptores de navegação, você pode encontrar os filtros IIR e FIR. Os filtros FIR têm a vantagem de poder criar um filtro com uma resposta de fase linear e, como resultado, um atraso constante do grupo. Isso significa que diferentes componentes de frequência serão atrasados pelo mesmo número de ciclos de clock ao passar pelo filtro. No entanto, usando um filtro IIR, uma janela de entalhe muito mais estreita e uma faixa de transição geralmente menor podem ser obtidas com a mesma ordem de filtro.Como isso funciona?Para que os algoritmos de supressão de interferência funcionem, são necessárias informações sobre o ambiente de interferência. A detecção de interferência de banda estreita é convenientemente realizada no domínio da frequência, enquanto o comportamento de pseudo-atrasos, potencial energético e viés de Doppler para a presença de saltos deve ser analisado para detectar ataques de falsificação. Para detectar interferências, as funções da janela devem ser usadas em conexão com o chamado fenômeno de espalhamento do espectro. Devido ao fato de que os bloqueadores podem estar localizados a distâncias diferentes do receptor, a interferência terá níveis diferentes. Sem o uso das funções da janela, algumas interferências podem ser mascaradas pelos lóbulos laterais de uma janela retangular, não detectadas e não compensadas.Algumas palavras sobre o meu desenvolvimento
Para detectar interferências, as funções da janela devem ser usadas em conexão com o chamado fenômeno de espalhamento do espectro. Devido ao fato de que os bloqueadores podem estar localizados a distâncias diferentes do receptor, a interferência terá níveis diferentes. Sem o uso das funções da janela, algumas interferências podem ser mascaradas pelos lóbulos laterais de uma janela retangular, não detectadas e não compensadas.Algumas palavras sobre o meu desenvolvimento Minha tarefa foi desenvolver um supressor na estrutura existente do receptor de navegação com base no VLSI 1879VIA1Ya fabricado pelo "Módulo" do Centro Técnico e Científico. Se falarmos brevemente sobre essa plataforma de hardware e software, podemos distinguir:1. 4 ADCs de 12 bits com uma frequência de amostragem de 81,92 MHz;2. O núcleo do ARM1176;3. 2 núcleos NeuroMatrix DSP com um multiplicador de matriz vetorial capaz de paralelizar com êxito operações com valores baixos de bits;4. Unidade de pré-processamento de sinal de hardware (BPOS).
Minha tarefa foi desenvolver um supressor na estrutura existente do receptor de navegação com base no VLSI 1879VIA1Ya fabricado pelo "Módulo" do Centro Técnico e Científico. Se falarmos brevemente sobre essa plataforma de hardware e software, podemos distinguir:1. 4 ADCs de 12 bits com uma frequência de amostragem de 81,92 MHz;2. O núcleo do ARM1176;3. 2 núcleos NeuroMatrix DSP com um multiplicador de matriz vetorial capaz de paralelizar com êxito operações com valores baixos de bits;4. Unidade de pré-processamento de sinal de hardware (BPOS).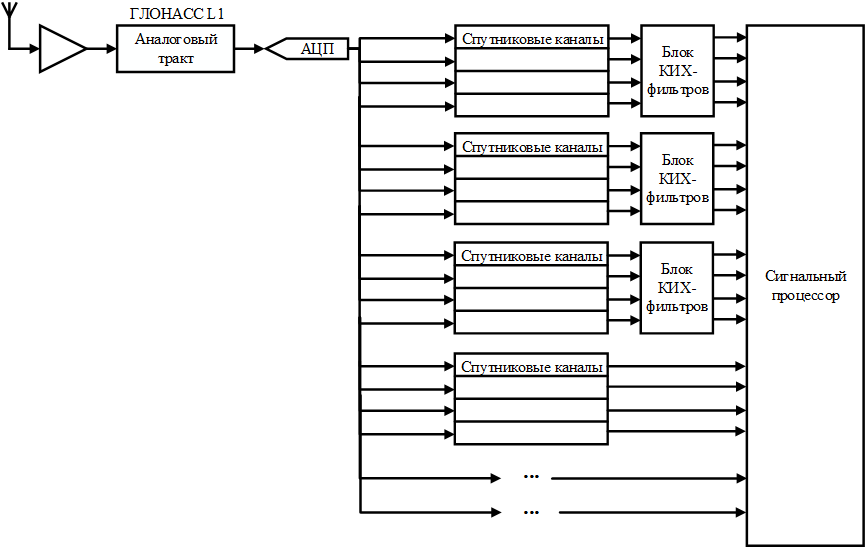 O restante dos detalhes pode ser encontrado no site, agora prestaremos mais atenção ao BPOS. O circuito receptor geral é dado acima. Ele contém uma antena, um caminho analógico (por exemplo, GLONASS L1, mas agora não importa), um ADC, canais digitais e um processador de sinal. O BPOS contém 24 canais digitais, 12 dos quais têm acesso a três blocos de filtros FIR. Cada bloco contém 4 filtros FIR de 64ª ordem com coeficientes de 8 bits. Dentro de uma unidade, os filtros podem ser trocados em série ou em paralelo para implementar de um a quatro supressores. Os canais digitais contêm um oscilador digital local, filtro passa-baixo, um dizimador (para diminuir a frequência de amostragem) e um normalizador. No processador de sinais (NeuroMatrix, não ARM), os algoritmos para detectar interferências, calcular os coeficientes dos filtros de hardware,processamento de correlação e loops de rastreamento (FAP e CVD).
O restante dos detalhes pode ser encontrado no site, agora prestaremos mais atenção ao BPOS. O circuito receptor geral é dado acima. Ele contém uma antena, um caminho analógico (por exemplo, GLONASS L1, mas agora não importa), um ADC, canais digitais e um processador de sinal. O BPOS contém 24 canais digitais, 12 dos quais têm acesso a três blocos de filtros FIR. Cada bloco contém 4 filtros FIR de 64ª ordem com coeficientes de 8 bits. Dentro de uma unidade, os filtros podem ser trocados em série ou em paralelo para implementar de um a quatro supressores. Os canais digitais contêm um oscilador digital local, filtro passa-baixo, um dizimador (para diminuir a frequência de amostragem) e um normalizador. No processador de sinais (NeuroMatrix, não ARM), os algoritmos para detectar interferências, calcular os coeficientes dos filtros de hardware,processamento de correlação e loops de rastreamento (FAP e CVD).128- 16- 67 , .
, , , .
. :

:

, .
Também deve ser observado que o filtro possui um recurso, ou seja, o atraso do grupo de inserção igual à metade do tamanho do filtro. Esse valor é levado em consideração na solução subsequente do problema de navegação e, portanto, é totalmente compensado. Source: https://habr.com/ru/post/pt389203/
All Articles