Controle vetorial para motor de dedos assíncronos
 No artigo anterior, "Controle vetorial do motor elétrico" nos dedos " , foi considerado um sistema de controle vetorial para motores síncronos. O artigo acabou sendo grande, então a questão sobre motores de indução foi colocada em uma publicação separada. Este artigo é uma continuação do artigo anterior e baseia-se nas explicações dos princípios de operação de motores elétricos fornecidos lá. Ela falará sobre os recursos do motor assíncrono em relação ao controle vetorial e também mostrará as diferenças na estrutura do sistema de controle vetorial entre máquinas síncronas e assíncronas.Como funciona um motor de indução? A explicação mais popular diz algo como "o estator cria um campo magnético rotativo que induz um CEM no rotor, que faz com que as correntes fluam para lá, como resultado do qual o rotor é levado pelo campo do estator e começa a girar". Pessoalmente, a partir de tal explicação, não começo a entender toda a física do processo, então vamos explicar de maneira diferente, "nos dedos".Ainda viu um vídeo de como um ímã interage com um cilindro de cobre? Preste especial atenção ao intervalo de tempo de 0:49 a 1:03 - este é um motor assíncrono real:O efeito é devido ao aparecimento de correntes de Foucault no cilindro. De acordo com a lei da indução eletromagnética , descoberta por Michael Faraday, quando o fluxo magnético de um circuito fechado muda, um EMF surge nele (basta assumir que a tensão). Esse CEM, aplicado a um cilindro de cobre, faz com que apareça imediatamente uma corrente no cilindro. Ao mesmo tempo, essa corrente também cria seu próprio fluxo magnético de resposta, direcionado exatamente na direção oposta à mudança no fluxo de ímã que trazemos: Acorrente de indução que surge em um circuito condutor fechado tem uma direção que o campo magnético criado por ela neutraliza as mudanças no fluxo magnético, o que causou essa corrente.Isso pode ser entendido de modo que o circuito fechado resista à mudança no fluxo magnético dentro de si. Se você levar o ímã para o cilindro de cobre, ou seja, faça uma mudança acentuada no fluxo magnético, então as correntes de resposta fluirão no cilindro para que o campo magnético dentro do cilindro no primeiro momento seja zero: o campo magnético do ímã trazido será completamente compensado pelo campo magnético das correntes do cilindro (com suposições, é claro). Se você segurar e segurar o ímã, as correntes no cilindro diminuirão gradualmente devido à presença de resistência ao cobre, e o campo do cilindro criado por suas correntes desaparecerá: o fluxo magnético do ímã permanente “estourará” no cilindro, como se não houvesse cilindro. Mas vale a pena tentar remover o ímã,como o cilindro reagirá novamente - agora ele tentará "recriar" o fluxo magnético perdido dentro de si, ou seja, resistirá novamente a uma mudança no fluxo magnético, neste caso, seu desaparecimento. Mas o que significa recriar o fluxo magnético? Isso significa que, por algum tempo, um cilindro de cobre pode ser considerado convencionalmente um "ímã permanente" - uma corrente de fuga circula nele, criando um campo magnético (os supercondutores em um campo magnético "permanecem" no mesmo princípio, mas essa é uma história completamente diferente).mas esta é uma história completamente diferente).mas esta é uma história completamente diferente).Vamos agora voltar ao design de um motor de indução. O rotor de um motor de indução também pode ser imaginado sob a forma de um cilindro de cobre. Mas em construções reais, essa é uma certa treliça na forma de uma “gaiola de esquilo” (Figura 1) feita de cobre ou alumínio, combinada com um circuito magnético (ferro revestido).Figura 1. O rotor de um motor de indução do tipo gaiola de esquilo com corrente em um dos “quadros” da gaiola de esquilo que responde a um aumento em um campo magnético externo.A figura mostra esquematicamente o fluxo de corrente em um dos "quadros", isto é, em algumas barras de uma gaiola de esquilo, se você trouxer um ímã de cima (crie uma corrente no estator). De fato, a corrente neste caso flui em todas as hastes, exceto, condicionalmente, nas hastes superior e inferior, para as quais não há alteração no fluxo (mas elas reagiriam a um ímã horizontalmente apresentado).Lembre-se do início do último artigouma foto com uma ilustração esquemática de uma máquina síncrona bifásica, onde estava o ímã no rotor? Agora vamos criar um motor de indução: em vez de um ímã, colocaremos duas bobinas perpendiculares em curto-circuito, simbolizando o cilindro de cobre do rotor (Figura 2).Figura 2. Representação esquemática de um motor de indução de gaiola de esquilo bifásico.A substituição de um cilindro por duas bobinas para explicar o princípio de operação (ou modelagem) está correta, assim como é correto substituir um enrolamento trifásico por um enrolamento bifásico. Somente neste caso, substituímos ... o "enrolamento em fase infinita" do cilindro (um número infinito de quadros) por duas bobinas com indutância e resistência equivalentes. Afinal, com duas bobinas, você pode criar exatamente o mesmo vetor de fluxo atual e magnético que um cilindro.E agora vamos dedicar um tempo curto a uma máquina assíncrona síncrona. Alimentamos o eixo β na bobinacorrente contínua e aguarde dois ou três segundos até que as correntes de resposta deixem de fluir no rotor: “criaremos um ímã externo”. Ou seja, esperaremos que as correntes caiam no rotor para que o campo magnético do estator "penetre o rotor" e ninguém interfira nele. O que acontecerá agora se você desligar a corrente no estator? É isso mesmo, pelos mesmos dois ou três segundos, enquanto a corrente do rotor se opõe a isso, obteremos um "ímã comum" do rotor (Figura 3).Figura 3. motor AC, quando apenas desligou o DC atual fase β - fluxos de corrente no rotor i rd .O que estamos esperando? Mais rapidamente, até o ímã desaparecer, traçamos ao longo dele o familiar eixo d (como em uma máquina síncrona) e o eixo q perpendicular a ele , preso ao rotor. Ativamos a estrutura do controle vetorial da máquina síncrona, aplicamos corrente ao longo do eixo q , criando um momento, vamos lá!Você pode até fazer algumas revoluções até que nosso ímã de açúcar derreta e o eixo dnão entrou no esquecimento. O que fazer? Não vamos desligar a corrente ao longo do eixo d, alimentando nosso ímã! E, novamente, vamos salvar a estrutura de controle vetorial da máquina síncrona, simplesmente enviando a tarefa ao longo do eixo d (anteriormente havia zero). Então, olhamos para a Figura 4: os eixos d , q são "conectados" ao rotor pelo sensor de posição, o motor está parado, a corrente ao longo do eixo d no estator é aplicada , o que neste caso coincide com o eixo β para uma máquina em pé . Não há corrente no eixo q : esperamos até o rotor "magnetizar". E agora alimentamos i sq atual (s - estator)! Vamos lá!Figura 4. Aplicamos corrente no eixo d , magnetizamos a máquina, preparando tudo para fornecer corrente ao eixo do estator q .Até onde iremos com este método do Barão Munchausen? Infelizmente não. Veja o que aconteceu (Figura 5):Figura 5. Um ímã escorregou!O motor começou a girar, mas algum tempo depois de aplicarmos a corrente no eixo q , formando a corrente total ie s "pregando" esse vetor na posição do rotor, o ímã no rotor "se moveu"! E ficou exatamente ao longo do vetor i s . O rotor não entende onde desenhamos os eixos d , q ... Não importa para ele se ele está girando ou não. É importante que o seu "ímã induzido" interno acabe quer se co-direcionar com o fluxo magnético do estator, para "obedecer" ao fluxo externo. Devido ao ímã que saiu, o motor para de girar: não apenas isso, entre o ímã do rotor e a corrente i q não há 90 graus desejados, há também uma corrente no eixod agora o puxa na direção oposta, compensando o momento criado pela corrente i q . O método do Barão Munchausen falhou.O que fazer com um ímã de rotor indescritível? E vamos fazer a estrutura de controle vetorial do motor de indução não nos eixos d , q conectados ao rotor, mas em outros eixos conectados exatamente à posição atual do “ímã do rotor” - vamos chamá-los de eixos x , y para distingui-los de d , q. De acordo com o “científico”, esses eixos são orientados ao longo da ligação do fluxo do rotor. Mas como você sabe onde exatamente agora está a ligação do fluxo do rotor, ou seja, onde está o ímã no rotor girado? Sua posição depende ... em primeiro lugar, da posição do próprio rotor (temos um sensor de posição, bem), em segundo lugar, nas correntes do estator (criando uma corrente do estator, que o ímã do rotor irá eventualmente girar) e, em terceiro lugar a partir dos parâmetros da corrente do rotor - a indutância e a resistência do "cilindro de cobre" (é uma gaiola de esquilo, é o enrolamento do rotor, é a corrente do rotor). Portanto ... sabendo tudo isso, a posição do "ímã" do rotor pode ser simplesmente calculada usando várias equações diferenciais. Isso é feito pelo chamado observador de ligação do fluxo do rotor, destacado em cores no diagrama de blocos final do controle vetorial de um motor assíncrono (Figura 6).
No artigo anterior, "Controle vetorial do motor elétrico" nos dedos " , foi considerado um sistema de controle vetorial para motores síncronos. O artigo acabou sendo grande, então a questão sobre motores de indução foi colocada em uma publicação separada. Este artigo é uma continuação do artigo anterior e baseia-se nas explicações dos princípios de operação de motores elétricos fornecidos lá. Ela falará sobre os recursos do motor assíncrono em relação ao controle vetorial e também mostrará as diferenças na estrutura do sistema de controle vetorial entre máquinas síncronas e assíncronas.Como funciona um motor de indução? A explicação mais popular diz algo como "o estator cria um campo magnético rotativo que induz um CEM no rotor, que faz com que as correntes fluam para lá, como resultado do qual o rotor é levado pelo campo do estator e começa a girar". Pessoalmente, a partir de tal explicação, não começo a entender toda a física do processo, então vamos explicar de maneira diferente, "nos dedos".Ainda viu um vídeo de como um ímã interage com um cilindro de cobre? Preste especial atenção ao intervalo de tempo de 0:49 a 1:03 - este é um motor assíncrono real:O efeito é devido ao aparecimento de correntes de Foucault no cilindro. De acordo com a lei da indução eletromagnética , descoberta por Michael Faraday, quando o fluxo magnético de um circuito fechado muda, um EMF surge nele (basta assumir que a tensão). Esse CEM, aplicado a um cilindro de cobre, faz com que apareça imediatamente uma corrente no cilindro. Ao mesmo tempo, essa corrente também cria seu próprio fluxo magnético de resposta, direcionado exatamente na direção oposta à mudança no fluxo de ímã que trazemos: Acorrente de indução que surge em um circuito condutor fechado tem uma direção que o campo magnético criado por ela neutraliza as mudanças no fluxo magnético, o que causou essa corrente.Isso pode ser entendido de modo que o circuito fechado resista à mudança no fluxo magnético dentro de si. Se você levar o ímã para o cilindro de cobre, ou seja, faça uma mudança acentuada no fluxo magnético, então as correntes de resposta fluirão no cilindro para que o campo magnético dentro do cilindro no primeiro momento seja zero: o campo magnético do ímã trazido será completamente compensado pelo campo magnético das correntes do cilindro (com suposições, é claro). Se você segurar e segurar o ímã, as correntes no cilindro diminuirão gradualmente devido à presença de resistência ao cobre, e o campo do cilindro criado por suas correntes desaparecerá: o fluxo magnético do ímã permanente “estourará” no cilindro, como se não houvesse cilindro. Mas vale a pena tentar remover o ímã,como o cilindro reagirá novamente - agora ele tentará "recriar" o fluxo magnético perdido dentro de si, ou seja, resistirá novamente a uma mudança no fluxo magnético, neste caso, seu desaparecimento. Mas o que significa recriar o fluxo magnético? Isso significa que, por algum tempo, um cilindro de cobre pode ser considerado convencionalmente um "ímã permanente" - uma corrente de fuga circula nele, criando um campo magnético (os supercondutores em um campo magnético "permanecem" no mesmo princípio, mas essa é uma história completamente diferente).mas esta é uma história completamente diferente).mas esta é uma história completamente diferente).Vamos agora voltar ao design de um motor de indução. O rotor de um motor de indução também pode ser imaginado sob a forma de um cilindro de cobre. Mas em construções reais, essa é uma certa treliça na forma de uma “gaiola de esquilo” (Figura 1) feita de cobre ou alumínio, combinada com um circuito magnético (ferro revestido).Figura 1. O rotor de um motor de indução do tipo gaiola de esquilo com corrente em um dos “quadros” da gaiola de esquilo que responde a um aumento em um campo magnético externo.A figura mostra esquematicamente o fluxo de corrente em um dos "quadros", isto é, em algumas barras de uma gaiola de esquilo, se você trouxer um ímã de cima (crie uma corrente no estator). De fato, a corrente neste caso flui em todas as hastes, exceto, condicionalmente, nas hastes superior e inferior, para as quais não há alteração no fluxo (mas elas reagiriam a um ímã horizontalmente apresentado).Lembre-se do início do último artigouma foto com uma ilustração esquemática de uma máquina síncrona bifásica, onde estava o ímã no rotor? Agora vamos criar um motor de indução: em vez de um ímã, colocaremos duas bobinas perpendiculares em curto-circuito, simbolizando o cilindro de cobre do rotor (Figura 2).Figura 2. Representação esquemática de um motor de indução de gaiola de esquilo bifásico.A substituição de um cilindro por duas bobinas para explicar o princípio de operação (ou modelagem) está correta, assim como é correto substituir um enrolamento trifásico por um enrolamento bifásico. Somente neste caso, substituímos ... o "enrolamento em fase infinita" do cilindro (um número infinito de quadros) por duas bobinas com indutância e resistência equivalentes. Afinal, com duas bobinas, você pode criar exatamente o mesmo vetor de fluxo atual e magnético que um cilindro.E agora vamos dedicar um tempo curto a uma máquina assíncrona síncrona. Alimentamos o eixo β na bobinacorrente contínua e aguarde dois ou três segundos até que as correntes de resposta deixem de fluir no rotor: “criaremos um ímã externo”. Ou seja, esperaremos que as correntes caiam no rotor para que o campo magnético do estator "penetre o rotor" e ninguém interfira nele. O que acontecerá agora se você desligar a corrente no estator? É isso mesmo, pelos mesmos dois ou três segundos, enquanto a corrente do rotor se opõe a isso, obteremos um "ímã comum" do rotor (Figura 3).Figura 3. motor AC, quando apenas desligou o DC atual fase β - fluxos de corrente no rotor i rd .O que estamos esperando? Mais rapidamente, até o ímã desaparecer, traçamos ao longo dele o familiar eixo d (como em uma máquina síncrona) e o eixo q perpendicular a ele , preso ao rotor. Ativamos a estrutura do controle vetorial da máquina síncrona, aplicamos corrente ao longo do eixo q , criando um momento, vamos lá!Você pode até fazer algumas revoluções até que nosso ímã de açúcar derreta e o eixo dnão entrou no esquecimento. O que fazer? Não vamos desligar a corrente ao longo do eixo d, alimentando nosso ímã! E, novamente, vamos salvar a estrutura de controle vetorial da máquina síncrona, simplesmente enviando a tarefa ao longo do eixo d (anteriormente havia zero). Então, olhamos para a Figura 4: os eixos d , q são "conectados" ao rotor pelo sensor de posição, o motor está parado, a corrente ao longo do eixo d no estator é aplicada , o que neste caso coincide com o eixo β para uma máquina em pé . Não há corrente no eixo q : esperamos até o rotor "magnetizar". E agora alimentamos i sq atual (s - estator)! Vamos lá!Figura 4. Aplicamos corrente no eixo d , magnetizamos a máquina, preparando tudo para fornecer corrente ao eixo do estator q .Até onde iremos com este método do Barão Munchausen? Infelizmente não. Veja o que aconteceu (Figura 5):Figura 5. Um ímã escorregou!O motor começou a girar, mas algum tempo depois de aplicarmos a corrente no eixo q , formando a corrente total ie s "pregando" esse vetor na posição do rotor, o ímã no rotor "se moveu"! E ficou exatamente ao longo do vetor i s . O rotor não entende onde desenhamos os eixos d , q ... Não importa para ele se ele está girando ou não. É importante que o seu "ímã induzido" interno acabe quer se co-direcionar com o fluxo magnético do estator, para "obedecer" ao fluxo externo. Devido ao ímã que saiu, o motor para de girar: não apenas isso, entre o ímã do rotor e a corrente i q não há 90 graus desejados, há também uma corrente no eixod agora o puxa na direção oposta, compensando o momento criado pela corrente i q . O método do Barão Munchausen falhou.O que fazer com um ímã de rotor indescritível? E vamos fazer a estrutura de controle vetorial do motor de indução não nos eixos d , q conectados ao rotor, mas em outros eixos conectados exatamente à posição atual do “ímã do rotor” - vamos chamá-los de eixos x , y para distingui-los de d , q. De acordo com o “científico”, esses eixos são orientados ao longo da ligação do fluxo do rotor. Mas como você sabe onde exatamente agora está a ligação do fluxo do rotor, ou seja, onde está o ímã no rotor girado? Sua posição depende ... em primeiro lugar, da posição do próprio rotor (temos um sensor de posição, bem), em segundo lugar, nas correntes do estator (criando uma corrente do estator, que o ímã do rotor irá eventualmente girar) e, em terceiro lugar a partir dos parâmetros da corrente do rotor - a indutância e a resistência do "cilindro de cobre" (é uma gaiola de esquilo, é o enrolamento do rotor, é a corrente do rotor). Portanto ... sabendo tudo isso, a posição do "ímã" do rotor pode ser simplesmente calculada usando várias equações diferenciais. Isso é feito pelo chamado observador de ligação do fluxo do rotor, destacado em cores no diagrama de blocos final do controle vetorial de um motor assíncrono (Figura 6).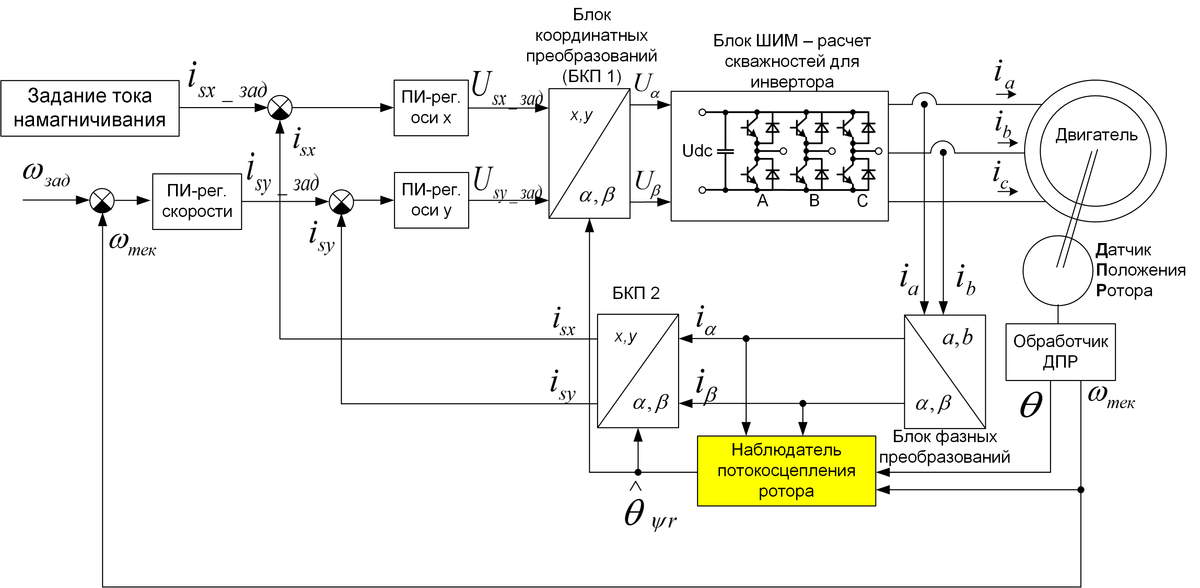
 . Caso contrário, a estrutura é completamente semelhante à de uma máquina síncrona, somente os eixos d , q são renomeados para x , y , e o eixo x recebe uma especificação atual que apoiará nosso "ímã" no rotor. Além disso, o " s”Mostrar que esse valor está relacionado ao estator, e não ao rotor. Deve-se notar também que na literatura ocidental os eixos x , y não são utilizados : para eles, o eixo d é sempre direcionado ao longo do campo do rotor, que é para um motor assíncrono e para um motor síncrono. Mesmo nos tempos soviéticos, nossos cientistas separaram os eixos d , q e x , y , para evitar confusão: d , q estão ligados ao rotor e x , y estão ligados ao campo do rotor .O que acontece? O ímã do rotor desliza o tempo todo, desliza da posição atual no rotor em direção à corrente do eixo y. Quanto maior essa corrente, mais forte é o escorregamento. O observador em tempo real calcula a posição desse imã e "torce" os eixos x , y o tempo todo em relação aos eixos d , q (posição do rotor). O eixo x sempre corresponde à posição atual da ligação de fluxo no rotor - a posição do “ímã”. I.e. eixo x , ysempre corra (no modo motor) um pouco mais rápido que a rotação do rotor, compensando o deslizamento nele. As correntes no rotor, se medidas ou modeladas, são sinusoidais. Somente eles mudam não com a frequência das correntes do estator, mas com a frequência desse escorregamento, ou seja, muito devagar. Se o estator do assíncrono industrial for 50Hz, quando estiver trabalhando sob carga, a frequência atual no rotor será unidades de hertz. De fato, esse é todo o segredo do controle vetorial para um motor de indução.Como o controle vetorial de um motor de indução é melhor que escalar? O controle escalar é tal quando uma tensão de uma dada frequência e amplitude é aplicada ao motor - por exemplo, 380V 50Hz. E isso não depende da carga no rotor - sem controladores de corrente e vetoriais ... A frequência de tensão e sua amplitude são simplesmente definidas - quantidades escalares, e permitem que as correntes e fluxos no motor encontrem um local conveniente para eles mesmos, conforme desejarem. Na operação do motor em estado estacionário, o controle vetorial é indistinguível do controle escalar - o controle vetorial também aplicará o mesmo, digamos, 380V, 50Hz na carga nominal. Mas em condições transitórias ... se você precisar iniciar o motor rapidamente em um determinado momento, se precisar elaborar um diagrama de movimento, se houver uma carga de pulso,se você precisar criar um modo de gerador com um determinado nível de potência, todo esse controle escalar não poderá fazê-lo ou com transientes lentos e repugnantes, que também podem "nocautear" o conversor de frequência excedendo a corrente ou a tensão do link CC (motor oscila e pode pular para o modo gerador, ao qual o conversor de frequência nem sempre está adaptado).Na estrutura vetorial, "tudo está sob controle". No momento em que você se define, o fluxo também. Você pode limitá-los ao nível correto para não exceder as configurações de proteção. É possível forçar as correntes de maneira controlada, se por um curto período de tempo for necessário fazer um momento várias vezes maior. É possível regular não apenas o momento do motor, mas também o fluxo (corrente do eixo x ): se a carga no motor é pequena, não faz sentido manter o fluxo total no rotor (criando um ímã de "modo nominal") - você pode enfraquecê-lo, reduzindo as perdas. É possível estabilizar a velocidade com um controlador de velocidade com alta precisão e velocidade. Você pode usar uma unidade assíncrona como unidade de tração (em transporte), configurando o momento de tração necessário. Em geral, para aplicações complexas com operação dinâmica do motor, o controle vetorial de um motor de indução é indispensável.Existem também características distintas do controle vetorial de um motor assíncrono e de um motor síncrono. O primeiro é o sensor de posição. Se, para um inversor síncrono, precisamos saber a posição absoluta do rotor para entender onde está o ímã, isso não é necessário em um inversor assíncrono. O rotor não possui nenhuma estrutura de pólo pronunciada, o “ímã” nele desliza constantemente e, se você observar as fórmulas do observador de ligação do fluxo do rotor, não precisará saber a posição: apenas a velocidade do rotor está incluída nas fórmulas (de fato, existem fórmulas diferentes, mas geralmente assim). Portanto, você pode economizar no sensor: um codificador incremental convencional é suficiente para rastrear a velocidade (ou mesmo um tacogerador); não são necessários sensores de posição absoluta. O segundo recurso é o controle de fluxo em um motor de indução.Em uma máquina síncrona com ímãs permanentes, o fluxo não é regulado, o que limita a velocidade máxima do motor: a tensão no inversor deixa de ser suficiente. Em um motor de indução, quando isso acontece ... apenas diminua a referência do eixoxe seguir em frente! A frequência máxima é ilimitada! Sim, o torque do motor diminuirá com isso, mas, o mais importante, você pode "subir", diferente de uma máquina síncrona (na verdade, também é possível lá, mas não muito longe, não para todos os motores e com muitos problemas).Da mesma forma, existem algoritmos de controle vetorial sem sensor para um motor de indução que estimam o ângulo de fluxo do rotor sem usar o sinal do sensor de posição (ou velocidade) do eixo do rotor. Da mesma forma que em máquinas síncronas, existem problemas na operação de tais sistemas a uma velocidade baixa do rotor, onde o motor EMF é pequeno.Você também deve dizer algumas palavras sobre o rotor. Se, para motores assíncronos industriais, é barato usando uma gaiola de esquilo de alumínio, em tração, onde os indicadores de peso e tamanho são mais importantes, pelo contrário, eles podem usar um cilindro de cobre. Assim, em todos os seus veículos elétricos favoritos da Tesla, existe precisamente um motor elétrico assíncrono com um rotor de cobre (Figura 7)Figura 7. Rotor de motor elétrico assíncrono Tesla Modelo S em revestimento de aço (foto de várias fontes para anos diferentes)Isso, de fato, é tudo o que eu queria dizer sobre o motor assíncrono. Neste artigo de revisão, muitas sutilezas não foram consideradas, como o regulador de fluxo do rotor, a possível construção de uma estrutura vetorial em outros eixos de coordenadas, a matemática do observador da ligação do fluxo do rotor e muito mais. Como no final do último artigo, para obter mais detalhes, refiro o leitor a livros modernos sobre o drive, por exemplo, “Anuchin A. S. Electric Systems control systems. MEI de 2015 " .Em qual microcontrolador você pode realizar um controle vetorial completo, leia, por exemplo, o artigo “Novo microcontrolador doméstico de controle de motor K1921VK01T do OJSC“ NIIET ”e como depurá- lo no artigo "Métodos para depurar software de microcontrolador em uma unidade elétrica" . Nossa empresa LLC NPF Vector também oferece o desenvolvimento de sistemas de controle personalizados para motores elétricos e outros equipamentos elétricos. Exemplos de projetos concluídos podem ser encontrados em nosso site .PSPeço desculpas aos especialistas pelo tratamento não muito correto com alguns termos, em particular com os termos "fluxo", "ligação de fluxo", "campo magnético" e outros - a simplicidade exige sacrifício ...
. Caso contrário, a estrutura é completamente semelhante à de uma máquina síncrona, somente os eixos d , q são renomeados para x , y , e o eixo x recebe uma especificação atual que apoiará nosso "ímã" no rotor. Além disso, o " s”Mostrar que esse valor está relacionado ao estator, e não ao rotor. Deve-se notar também que na literatura ocidental os eixos x , y não são utilizados : para eles, o eixo d é sempre direcionado ao longo do campo do rotor, que é para um motor assíncrono e para um motor síncrono. Mesmo nos tempos soviéticos, nossos cientistas separaram os eixos d , q e x , y , para evitar confusão: d , q estão ligados ao rotor e x , y estão ligados ao campo do rotor .O que acontece? O ímã do rotor desliza o tempo todo, desliza da posição atual no rotor em direção à corrente do eixo y. Quanto maior essa corrente, mais forte é o escorregamento. O observador em tempo real calcula a posição desse imã e "torce" os eixos x , y o tempo todo em relação aos eixos d , q (posição do rotor). O eixo x sempre corresponde à posição atual da ligação de fluxo no rotor - a posição do “ímã”. I.e. eixo x , ysempre corra (no modo motor) um pouco mais rápido que a rotação do rotor, compensando o deslizamento nele. As correntes no rotor, se medidas ou modeladas, são sinusoidais. Somente eles mudam não com a frequência das correntes do estator, mas com a frequência desse escorregamento, ou seja, muito devagar. Se o estator do assíncrono industrial for 50Hz, quando estiver trabalhando sob carga, a frequência atual no rotor será unidades de hertz. De fato, esse é todo o segredo do controle vetorial para um motor de indução.Como o controle vetorial de um motor de indução é melhor que escalar? O controle escalar é tal quando uma tensão de uma dada frequência e amplitude é aplicada ao motor - por exemplo, 380V 50Hz. E isso não depende da carga no rotor - sem controladores de corrente e vetoriais ... A frequência de tensão e sua amplitude são simplesmente definidas - quantidades escalares, e permitem que as correntes e fluxos no motor encontrem um local conveniente para eles mesmos, conforme desejarem. Na operação do motor em estado estacionário, o controle vetorial é indistinguível do controle escalar - o controle vetorial também aplicará o mesmo, digamos, 380V, 50Hz na carga nominal. Mas em condições transitórias ... se você precisar iniciar o motor rapidamente em um determinado momento, se precisar elaborar um diagrama de movimento, se houver uma carga de pulso,se você precisar criar um modo de gerador com um determinado nível de potência, todo esse controle escalar não poderá fazê-lo ou com transientes lentos e repugnantes, que também podem "nocautear" o conversor de frequência excedendo a corrente ou a tensão do link CC (motor oscila e pode pular para o modo gerador, ao qual o conversor de frequência nem sempre está adaptado).Na estrutura vetorial, "tudo está sob controle". No momento em que você se define, o fluxo também. Você pode limitá-los ao nível correto para não exceder as configurações de proteção. É possível forçar as correntes de maneira controlada, se por um curto período de tempo for necessário fazer um momento várias vezes maior. É possível regular não apenas o momento do motor, mas também o fluxo (corrente do eixo x ): se a carga no motor é pequena, não faz sentido manter o fluxo total no rotor (criando um ímã de "modo nominal") - você pode enfraquecê-lo, reduzindo as perdas. É possível estabilizar a velocidade com um controlador de velocidade com alta precisão e velocidade. Você pode usar uma unidade assíncrona como unidade de tração (em transporte), configurando o momento de tração necessário. Em geral, para aplicações complexas com operação dinâmica do motor, o controle vetorial de um motor de indução é indispensável.Existem também características distintas do controle vetorial de um motor assíncrono e de um motor síncrono. O primeiro é o sensor de posição. Se, para um inversor síncrono, precisamos saber a posição absoluta do rotor para entender onde está o ímã, isso não é necessário em um inversor assíncrono. O rotor não possui nenhuma estrutura de pólo pronunciada, o “ímã” nele desliza constantemente e, se você observar as fórmulas do observador de ligação do fluxo do rotor, não precisará saber a posição: apenas a velocidade do rotor está incluída nas fórmulas (de fato, existem fórmulas diferentes, mas geralmente assim). Portanto, você pode economizar no sensor: um codificador incremental convencional é suficiente para rastrear a velocidade (ou mesmo um tacogerador); não são necessários sensores de posição absoluta. O segundo recurso é o controle de fluxo em um motor de indução.Em uma máquina síncrona com ímãs permanentes, o fluxo não é regulado, o que limita a velocidade máxima do motor: a tensão no inversor deixa de ser suficiente. Em um motor de indução, quando isso acontece ... apenas diminua a referência do eixoxe seguir em frente! A frequência máxima é ilimitada! Sim, o torque do motor diminuirá com isso, mas, o mais importante, você pode "subir", diferente de uma máquina síncrona (na verdade, também é possível lá, mas não muito longe, não para todos os motores e com muitos problemas).Da mesma forma, existem algoritmos de controle vetorial sem sensor para um motor de indução que estimam o ângulo de fluxo do rotor sem usar o sinal do sensor de posição (ou velocidade) do eixo do rotor. Da mesma forma que em máquinas síncronas, existem problemas na operação de tais sistemas a uma velocidade baixa do rotor, onde o motor EMF é pequeno.Você também deve dizer algumas palavras sobre o rotor. Se, para motores assíncronos industriais, é barato usando uma gaiola de esquilo de alumínio, em tração, onde os indicadores de peso e tamanho são mais importantes, pelo contrário, eles podem usar um cilindro de cobre. Assim, em todos os seus veículos elétricos favoritos da Tesla, existe precisamente um motor elétrico assíncrono com um rotor de cobre (Figura 7)Figura 7. Rotor de motor elétrico assíncrono Tesla Modelo S em revestimento de aço (foto de várias fontes para anos diferentes)Isso, de fato, é tudo o que eu queria dizer sobre o motor assíncrono. Neste artigo de revisão, muitas sutilezas não foram consideradas, como o regulador de fluxo do rotor, a possível construção de uma estrutura vetorial em outros eixos de coordenadas, a matemática do observador da ligação do fluxo do rotor e muito mais. Como no final do último artigo, para obter mais detalhes, refiro o leitor a livros modernos sobre o drive, por exemplo, “Anuchin A. S. Electric Systems control systems. MEI de 2015 " .Em qual microcontrolador você pode realizar um controle vetorial completo, leia, por exemplo, o artigo “Novo microcontrolador doméstico de controle de motor K1921VK01T do OJSC“ NIIET ”e como depurá- lo no artigo "Métodos para depurar software de microcontrolador em uma unidade elétrica" . Nossa empresa LLC NPF Vector também oferece o desenvolvimento de sistemas de controle personalizados para motores elétricos e outros equipamentos elétricos. Exemplos de projetos concluídos podem ser encontrados em nosso site .PSPeço desculpas aos especialistas pelo tratamento não muito correto com alguns termos, em particular com os termos "fluxo", "ligação de fluxo", "campo magnético" e outros - a simplicidade exige sacrifício ...Source: https://habr.com/ru/post/pt389793/
All Articles