Em computadores de bordo especializados, vamos colocar uma palavra
Neste artigo, gostaria de complementar um pouco o artigo anterior sobre computadores militares especializados . A partir dos anos 40, o desenvolvimento de equipamentos de defesa passou a aumentar a precisão e o alcance da destruição, aumentando o poder das armas de destruição e a velocidade do movimento. Rumo à automação das operações de controle de armas. Voltando um pouco. Até a Segunda Guerra Mundial, os dados de tiro eram obtidos usando construtores mecânicos, diferenciais, sistemas de rastreamento e conóides. Dispositivos de controle de artilharia antiaérea (PUASO) foram inventados, usados em defesa antiaérea, dispositivos de controle de tiro (PUS) - em artilharia naval, dispositivos de tiro com torpedo (TAS) - para bombardeio. No ano 50, transformadores e selsinos rotativos, amplificadores CC decisivos com feedback negativo, foram criados. Isso ajudou a resolver o problema de determinação de dados para queima e levou a uma redução nas dimensões dos dispositivos e reduziu significativamente os custos de mão-de-obra de sua fabricação.Essa transição para dispositivos eletromecânicos e eletrônicos ajudou a reduzir significativamente o custo de fabricação de dispositivos de computação mecânica (afinal, a precisão dos dados de saída nesses dispositivos de computação estava diretamente relacionada à precisão de sua fabricação).Sem dúvida, era necessário um dispositivo (computador), que possibilitasse resolver problemas lógicos e computacionais de qualquer complexidade, era necessário criar as condições para a transição para a computação digital.Para assuntos militares, os requisitos para computadores criados foram aumentados. Precisávamos de elementos eletrônicos que fossem confiáveis o suficiente, tivessem velocidade e tudo isso ao trabalhar em uma ampla faixa de temperatura, com alta umidade, vibração, choque. Foi necessário o desenvolvimento de uma metodologia para a construção e o design de computadores e suas principais partes, como dispositivos aritméticos, memória, dispositivos de controle, sistemas de energia e dispositivos de troca. Também precisávamos de uma solução de design que nos permitisse projetar um computador e garantir sua operação confiável sob várias condições mecânicas e climáticas.Outro requisito era o uso da matemática computacional, o que permitiria formular numericamente, com a precisão necessária, a solução de problemas no uso de armas. Foram necessários meios para converter os parâmetros medidos em números e para reverter as soluções obtidas na forma de números em valores de deslocamentos físicos ou ângulos de rotação.A questão mais importante na criação de computadores militares trabalhando em sistemas foi a questão do treinamento de pessoal. Eles tiveram que projetar e produzir computadores. Eles precisavam ser “universais”, pois esse especialista precisava entender não apenas os problemas matemáticos associados a algoritmos, métodos numéricos de solução e programação, mas também problemas técnicos e industriais.
Voltando um pouco. Até a Segunda Guerra Mundial, os dados de tiro eram obtidos usando construtores mecânicos, diferenciais, sistemas de rastreamento e conóides. Dispositivos de controle de artilharia antiaérea (PUASO) foram inventados, usados em defesa antiaérea, dispositivos de controle de tiro (PUS) - em artilharia naval, dispositivos de tiro com torpedo (TAS) - para bombardeio. No ano 50, transformadores e selsinos rotativos, amplificadores CC decisivos com feedback negativo, foram criados. Isso ajudou a resolver o problema de determinação de dados para queima e levou a uma redução nas dimensões dos dispositivos e reduziu significativamente os custos de mão-de-obra de sua fabricação.Essa transição para dispositivos eletromecânicos e eletrônicos ajudou a reduzir significativamente o custo de fabricação de dispositivos de computação mecânica (afinal, a precisão dos dados de saída nesses dispositivos de computação estava diretamente relacionada à precisão de sua fabricação).Sem dúvida, era necessário um dispositivo (computador), que possibilitasse resolver problemas lógicos e computacionais de qualquer complexidade, era necessário criar as condições para a transição para a computação digital.Para assuntos militares, os requisitos para computadores criados foram aumentados. Precisávamos de elementos eletrônicos que fossem confiáveis o suficiente, tivessem velocidade e tudo isso ao trabalhar em uma ampla faixa de temperatura, com alta umidade, vibração, choque. Foi necessário o desenvolvimento de uma metodologia para a construção e o design de computadores e suas principais partes, como dispositivos aritméticos, memória, dispositivos de controle, sistemas de energia e dispositivos de troca. Também precisávamos de uma solução de design que nos permitisse projetar um computador e garantir sua operação confiável sob várias condições mecânicas e climáticas.Outro requisito era o uso da matemática computacional, o que permitiria formular numericamente, com a precisão necessária, a solução de problemas no uso de armas. Foram necessários meios para converter os parâmetros medidos em números e para reverter as soluções obtidas na forma de números em valores de deslocamentos físicos ou ângulos de rotação.A questão mais importante na criação de computadores militares trabalhando em sistemas foi a questão do treinamento de pessoal. Eles tiveram que projetar e produzir computadores. Eles precisavam ser “universais”, pois esse especialista precisava entender não apenas os problemas matemáticos associados a algoritmos, métodos numéricos de solução e programação, mas também problemas técnicos e industriais.50 : — — ? : ?
O desenvolvimento de computadores militares mostrou que os principais projetistas com experiência em engenharia se mostraram mais adaptados.Havia três áreas de aplicação de computadores no campo militar: diferiam nas condições climáticas e mecânicas de operação. Os primeiros foram utilizados em condições estacionárias (nas dependências), o segundo em reboques, contêineres, transportados por via aérea, marítima, ferroviária, rodoviária e incluídos no trabalho após serem instalados em posições, o terceiro em objetos em movimento, máquinas denominadas computadores de bordo (BEWM : transportável, aeroespacial, foguete, mar). Os carros incluem VMs; eles foram instalados em tanques, carros e outros veículos móveis.Computadores de controle a bordo. Pimenta:
- « 11» (, )
- « 12»
- « 10»
- -263
- -264
- 15579
- 475 ( )
- 867 ( )
- :
:
- 592
- 551
- 5765
- «»
- 589
- -3 (-3)
- -1
- 10
- 10
- « 20»
- « 2»
- 3
- 1
- 2
- 4-2
- 4-3
- -10,
- -13
- 340
- 340
- «»,
- 553
( , , ):
- «-15»
- «-16»
- «-17»
- 100
- 30
- -50
- « 20»
- 80-30
- 80-40
- « 30»
- « 40»
- -1
- -2
- «» -175
- -176
- -7
- :
- «» ( )
- «-1
- »-3"
- «»
- « 3»
- «»
- « » «»
- «» ( )
- «»
- «»
- «»
- «»
- «»
- «»
- «»
- «»
- « 0»
- «»
- «-»
:
- « 1»
- 406
- « 2»
- «-30» ,«-40», «-3», «-50»
- «-7»
- «-9»
- «-13»
- «-2»
- «-3»
Computador M-40Em março de 1961, o complexo com o M-40 SCVM foi o primeiro do mundo a destruir a ogiva de um míssil balístico com uma carga de fragmentação de um anti-míssil.Em 1956, sob a liderança de Lebedev e Burtsev, um computador digital M-40 foi desenvolvido para controlar estações de radar de longo alcance e direcionar com precisão, para implementar orientação antimísseis em um míssil balístico inimigo. Este foi o primeiro computador grande especializado em lâmpadas digitais. A velocidade dessa máquina era de 40 mil operações por segundo. OP estava em núcleos de ferrita com capacidade para 4096 palavras e ciclo de 6 µs. Esse computador digital trabalhava com números binários de ponto fixo de 36 bits.No M-40, foram implementados um ciclo de controle de operação flutuante e um sistema de interrupção, a combinação de operações com o canal de troca e o canal de troca multiplex. A máquina trabalhava em um circuito fechado de controle como um link de controle com objetos remotos via linhas de comunicação duplex de rádio-relé.Na primavera de 1956, o SKB-30 lançou um projeto preliminar do sistema de defesa antimísseis A, cujo sistema incluía os seguintes elementos: radares Danube-2 com alcance de detecção de 1200 km, três mísseis antimísseis para orientação precisa dos alvos e uma posição de lançamento com lançadores instalações de sistemas anti-mísseis de dois estágios "V-1000", a principal estação de comando e computação do sistema com um computador com lâmpadas M-40 e linhas de comunicação por rádio-relé entre todas as instalações do sistema. 38 -
38 -4 1961 «» -1000 - 25 -12, () 500 . «-2» «» 1500 , -40 -12, (), . 16 - , . , . , . .. . -40 .. .
Computador digital especializado M-50 Em 1959, sob a liderança de Lebedev e Burtsev, foi criado um computador digital especializado M-50. Ela foi uma modificação do M-40 trabalhado com números de ponto flutuante.Um complexo de duas máquinas foi criado com base nessas duas máquinas M-40 e M-50. O computador digital especial 5E92 foi uma modificação do M-50 e foi usado para equipamentos de controle e gravação com a capacidade de gravar remotamente dados provenientes de canais de comunicação de alta frequência.Máquina de computação eletrônica especializada 5E26Sob a liderança de Lebedev e Burtsev em 1978, o Instituto de Mecânica de Precisão e Engenharia de Computação (ITMiVT) da Academia de Ciências da URSS desenvolveu um 5E26 de computação eletrônica especializado. Foi o primeiro sistema de computação de alto desempenho com multiprocessador de controle móvel. É baseado no princípio de construção modular com um sistema de backup automático altamente eficiente. Ela trabalhou em uma ampla gama de influências climáticas e mecânicas. O sistema de backup automático foi baseado no controle de hardware. O software de automação de programação foi desenvolvido. A máquina móvel trabalhava com linguagens de alto nível, a memória não volátil de comandos era usada em microbixes, havia a possibilidade de reescrever as informações com equipamento de gravação externo.
Em 1959, sob a liderança de Lebedev e Burtsev, foi criado um computador digital especializado M-50. Ela foi uma modificação do M-40 trabalhado com números de ponto flutuante.Um complexo de duas máquinas foi criado com base nessas duas máquinas M-40 e M-50. O computador digital especial 5E92 foi uma modificação do M-50 e foi usado para equipamentos de controle e gravação com a capacidade de gravar remotamente dados provenientes de canais de comunicação de alta frequência.Máquina de computação eletrônica especializada 5E26Sob a liderança de Lebedev e Burtsev em 1978, o Instituto de Mecânica de Precisão e Engenharia de Computação (ITMiVT) da Academia de Ciências da URSS desenvolveu um 5E26 de computação eletrônica especializado. Foi o primeiro sistema de computação de alto desempenho com multiprocessador de controle móvel. É baseado no princípio de construção modular com um sistema de backup automático altamente eficiente. Ela trabalhou em uma ampla gama de influências climáticas e mecânicas. O sistema de backup automático foi baseado no controle de hardware. O software de automação de programação foi desenvolvido. A máquina móvel trabalhava com linguagens de alto nível, a memória não volátil de comandos era usada em microbixes, havia a possibilidade de reescrever as informações com equipamento de gravação externo. A produtividade desse computador era de 1,5 milhão de operações por segundo, o comprimento da palavra era de 32 bits, a informação era apresentada como uma palavra inteira, meia palavra, byte e bit. A RAM era de 32 a 34 Kb, a memória de comando era de 64 a 255 Kb e o consumo de energia era de 5 a 9 kW. Um processador de entrada / saída independente para informações sobre 12 canais de comunicação com uma taxa de câmbio máxima de mais de 1 Mbit por segundo.O carro tinha memória dupla face em ferrites. As dimensões totais de uma placa são 65 * 45 cm, a espessura era de 1,2 cm e o peso é de cerca de 6 kg. A memória de ferrita consistia em paralelepípedos, dois fios perpendiculares passavam através deles, formando uma matriz bidimensional. O bloco de memória consistia em 16 placas de dupla face.
A produtividade desse computador era de 1,5 milhão de operações por segundo, o comprimento da palavra era de 32 bits, a informação era apresentada como uma palavra inteira, meia palavra, byte e bit. A RAM era de 32 a 34 Kb, a memória de comando era de 64 a 255 Kb e o consumo de energia era de 5 a 9 kW. Um processador de entrada / saída independente para informações sobre 12 canais de comunicação com uma taxa de câmbio máxima de mais de 1 Mbit por segundo.O carro tinha memória dupla face em ferrites. As dimensões totais de uma placa são 65 * 45 cm, a espessura era de 1,2 cm e o peso é de cerca de 6 kg. A memória de ferrita consistia em paralelepípedos, dois fios perpendiculares passavam através deles, formando uma matriz bidimensional. O bloco de memória consistia em 16 placas de dupla face. foto tirada daqui5E26 foi produzido em duas versões. O design do computador era de bloco grande, as células foram instaladas nos blocos. Um total de 1.500 desses computadores foi produzido, de 1978 a 1994. Ele foi projetado para uso em sistemas de controle de armas do Ministério da Defesa.O SARPO "Yauza" foi definido como 5E26 para desenvolver um conjunto de programas de "Base" da RLU e, em seguida, o sistema Baikal.
foto tirada daqui5E26 foi produzido em duas versões. O design do computador era de bloco grande, as células foram instaladas nos blocos. Um total de 1.500 desses computadores foi produzido, de 1978 a 1994. Ele foi projetado para uso em sistemas de controle de armas do Ministério da Defesa.O SARPO "Yauza" foi definido como 5E26 para desenvolver um conjunto de programas de "Base" da RLU e, em seguida, o sistema Baikal. Máquina decomputação especializada 5E92b Máquina de computação especializada 40U6A máquina 40U6 foi desenvolvida em 1988, seu designer-chefe foi Krivosheev. Era um computador multiprocessador de controle móvel, também baseado no princípio modular. Devido ao fato de alguns módulos terem sido duplicados e reservados, era altamente confiável, um extenso sistema de controle de hardware fornecia a capacidade de restaurar o processo de controle em caso de mau funcionamento ou falha do equipamento.
Máquina decomputação especializada 5E92b Máquina de computação especializada 40U6A máquina 40U6 foi desenvolvida em 1988, seu designer-chefe foi Krivosheev. Era um computador multiprocessador de controle móvel, também baseado no princípio modular. Devido ao fato de alguns módulos terem sido duplicados e reservados, era altamente confiável, um extenso sistema de controle de hardware fornecia a capacidade de restaurar o processo de controle em caso de mau funcionamento ou falha do equipamento. O SEVM 40U6 trabalhou em tempo real e foi projetado para operar em uma ampla gama de influências climáticas e mecânicas. Como no 5E26 anterior, forneceu suporte matemático avançado para automação de programação. O carro consumiu 5,5 kW.O design da máquina era bloco, foram usadas palavras de ponto flutuante de 32 bits. A RAM era de 256 kB e possuía controle interno por códigos de Hamming, controle de byte das transmissões, intercalação, memória de comando de 512 kB e também controle interno por códigos de Hamming, controle de byte das transmissões, um processador de entrada e saída de informações de 15 canais. Mudar para a energia da bateria quando a energia é desligada contribuiu para o fato de as informações não desaparecerem.Para construir 40U6, uma série de baixa potência de microcircuitos TTL e microcircuitos de memória CMOS foram usados. O software dessa máquina é tradutor de autocode, Fortran, SI, Pascal.Em 1990, mais de 200 carros foram produzidos.Espaço Gorynych BCVM "Argônio-11C"
O SEVM 40U6 trabalhou em tempo real e foi projetado para operar em uma ampla gama de influências climáticas e mecânicas. Como no 5E26 anterior, forneceu suporte matemático avançado para automação de programação. O carro consumiu 5,5 kW.O design da máquina era bloco, foram usadas palavras de ponto flutuante de 32 bits. A RAM era de 256 kB e possuía controle interno por códigos de Hamming, controle de byte das transmissões, intercalação, memória de comando de 512 kB e também controle interno por códigos de Hamming, controle de byte das transmissões, um processador de entrada e saída de informações de 15 canais. Mudar para a energia da bateria quando a energia é desligada contribuiu para o fato de as informações não desaparecerem.Para construir 40U6, uma série de baixa potência de microcircuitos TTL e microcircuitos de memória CMOS foram usados. O software dessa máquina é tradutor de autocode, Fortran, SI, Pascal.Em 1990, mais de 200 carros foram produzidos.Espaço Gorynych BCVM "Argônio-11C" O primeiro computador doméstico que voou para o espaço foi o computador Argon-11S.
O primeiro computador doméstico que voou para o espaço foi o computador Argon-11S.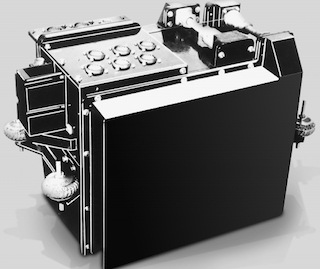 Foi criada em 1968, foram feitas 21 amostras desta máquina. A máquina foi usada no sistema de controle da sonda Zond (voando e fotografando a superfície da Lua com o retorno da sonda à Terra). O trabalho foi realizado em tempo real. A estrutura e a arquitetura da máquina tinham um conjunto mínimo de instruções; esse computador consistia em três dispositivos de computação funcionalmente autônomos com entradas e saídas independentes, canais interconectados para troca e sincronização de informações. A entrada e a saída de informações são realizadas por software. A “cabeça tripla” dos computadores de bordo Argon-11C é uma das principais características de design dos equipamentos de computação espacial. A capacidade da RAM é de 128 palavras de 14 bits, a capacidade da ROM é de 4096 palavras de 17 bits. Foram utilizados circuitos híbridos integrados com Tropa-1.A principal vantagem da série Trail foi a simplicidade da tecnologia.Com o advento da primeira série doméstica de circuitos integrados monolíticos, a série 110 (circuitos integrados de lógica transistorizada com acoplamentos resistivos-capacitivos), o computador digital Argon-11 para foguetes foi desenvolvido.A máquina foi criada na forma de dois blocos que foram combinados em um único design - um bloco de um dispositivo de três canais para troca e computação com três RAM e um bloco de uma memória de longo prazo de três canais. Usando os ventiladores embutidos, o calor foi removido para o gabinete. Tamanho da máquina - 305x305x550 mm, peso - 34 kg, o consumo de energia foi de 75 watts e o tempo de operação contínua foi de -180 minutos. Essa máquina trabalhava na faixa de temperatura de 0 a 40 graus.No Argon-11C, pela primeira vez na prática de criação de computadores de bordo, foi aplicado um esquema de reserva de nós, denominado estrutura troirovanny com majorização.A confiabilidade desta máquina era bastante alta. A probabilidade de falha em dois de seus três módulos foi de 0,999 por oito dias do voo da espaçonave para a Lua e vice-versa.
Foi criada em 1968, foram feitas 21 amostras desta máquina. A máquina foi usada no sistema de controle da sonda Zond (voando e fotografando a superfície da Lua com o retorno da sonda à Terra). O trabalho foi realizado em tempo real. A estrutura e a arquitetura da máquina tinham um conjunto mínimo de instruções; esse computador consistia em três dispositivos de computação funcionalmente autônomos com entradas e saídas independentes, canais interconectados para troca e sincronização de informações. A entrada e a saída de informações são realizadas por software. A “cabeça tripla” dos computadores de bordo Argon-11C é uma das principais características de design dos equipamentos de computação espacial. A capacidade da RAM é de 128 palavras de 14 bits, a capacidade da ROM é de 4096 palavras de 17 bits. Foram utilizados circuitos híbridos integrados com Tropa-1.A principal vantagem da série Trail foi a simplicidade da tecnologia.Com o advento da primeira série doméstica de circuitos integrados monolíticos, a série 110 (circuitos integrados de lógica transistorizada com acoplamentos resistivos-capacitivos), o computador digital Argon-11 para foguetes foi desenvolvido.A máquina foi criada na forma de dois blocos que foram combinados em um único design - um bloco de um dispositivo de três canais para troca e computação com três RAM e um bloco de uma memória de longo prazo de três canais. Usando os ventiladores embutidos, o calor foi removido para o gabinete. Tamanho da máquina - 305x305x550 mm, peso - 34 kg, o consumo de energia foi de 75 watts e o tempo de operação contínua foi de -180 minutos. Essa máquina trabalhava na faixa de temperatura de 0 a 40 graus.No Argon-11C, pela primeira vez na prática de criação de computadores de bordo, foi aplicado um esquema de reserva de nós, denominado estrutura troirovanny com majorização.A confiabilidade desta máquina era bastante alta. A probabilidade de falha em dois de seus três módulos foi de 0,999 por oito dias do voo da espaçonave para a Lua e vice-versa.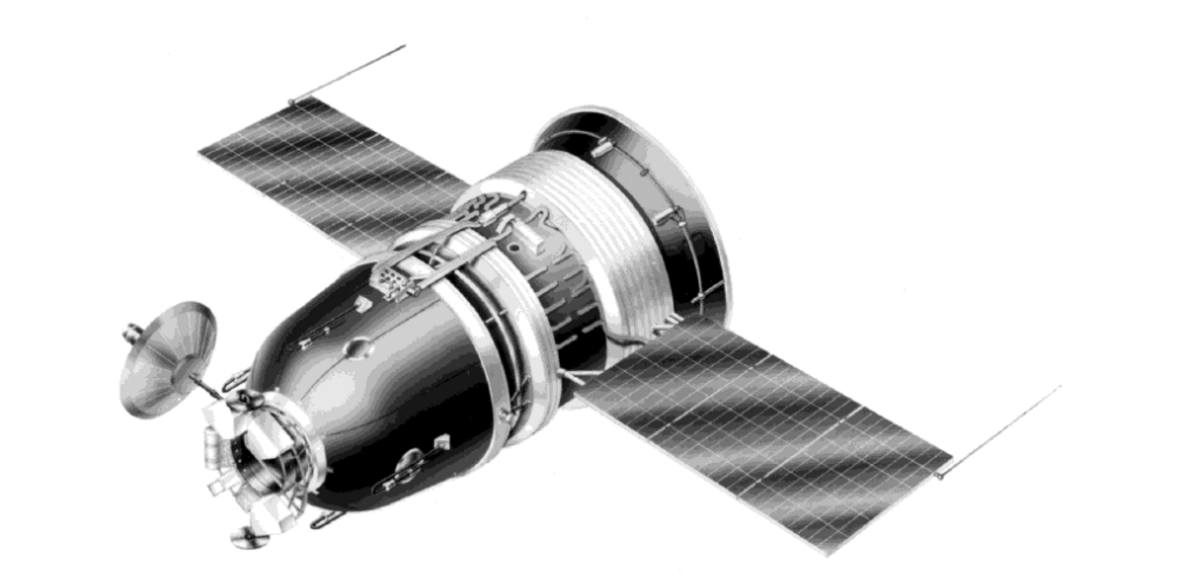 estação espacial "Probe-4"A missão espacial foi muito responsável. Os dispositivos da série Zond foram projetados com base na espaçonave tripulada Soyuz 7K-L1, cuja tarefa era investigar a possibilidade de pousar cosmonautas soviéticos na lua. O computador digital Argon-11S foi projetado para controlar o movimento da sonda L1 da série Zond durante seu vôo ao redor da Lua e descida aerodinâmica para a Terra quando entrou na atmosfera na segunda velocidade cósmica.
estação espacial "Probe-4"A missão espacial foi muito responsável. Os dispositivos da série Zond foram projetados com base na espaçonave tripulada Soyuz 7K-L1, cuja tarefa era investigar a possibilidade de pousar cosmonautas soviéticos na lua. O computador digital Argon-11S foi projetado para controlar o movimento da sonda L1 da série Zond durante seu vôo ao redor da Lua e descida aerodinâmica para a Terra quando entrou na atmosfera na segunda velocidade cósmica.A tarefa disso era politicamente importante. O programa Apollo, dirigido pela NASA desde o início dos anos sessenta, entrou no estágio de vôo tripulado em 1968, e a liderança soviética queria limpar o nariz de um potencial adversário.
O desenho do esquema troopirovanny "Argon-11C" foi um sucesso. Mais tarde, o mesmo esquema foi usado para criar o computador digital Argon-16, chamado centenário do espaço (usado na espaçonave mais diversificada por mais de 25 anos). Cerca de trezentas cópias do argônio-16 trabalharam na Soyuz, nas transportadoras Progress, nas estações orbitais Salyut e Mir.Embora o programa lunar da URSS tenha falhado, ele contribuiu para o desenvolvimento da tecnologia de computadores de bordo para a base espacial.Os BCMs da série C que substituíram o argônio, em particular o S-530, foram utilizados com sucesso nos sistemas de controle das estações interplanetárias de Marte e Vênus. Com a ajuda deles, pela primeira vez na história da humanidade, uma espaçonave estava pousando na superfície de Marte, estudos do cometa Vega e radar de Vênus foram realizados.
Sobre o software desses computadores especiais pode ser encontrado aqui. Source: https://habr.com/ru/post/pt390035/
All Articles