Prólogo
Em um artigo anterior , foi considerada a formulação do problema para o desenvolvimento de uma fonte de energia de reserva de baixa potência para 60 W com uma saída senoidal para a bomba de circulação do sistema de aquecimento. O conceito de implementação deste dispositivo foi escolhido. Este artigo discutirá o desenvolvimento do circuito elétrico do dispositivo, com os cálculos necessários para escolher as classificações dos componentes que compõem o dispositivo.Armado com CADs e livros didáticos, rascunhos, lápis e GOOGLE, começaremos a projetar. Vamos começar com um simples - o sistema de energia do dispositivo.Catering
Para alimentar os elementos do circuito, precisamos de três tipos de barramento CC em 12, 5 e 3,3 Volts.Ônibus de doze volts - o principal. É a fonte de alimentação da ponte, que injeta corrente no enrolamento de baixa tensão de um transformador de rede linear. A partir disso, alimentamos o driver dos transistores incluídos na ponte. Os relés de comutação de rede também serão alimentados a partir deste barramento.É necessário um barramento de cinco volts para alimentar o chip de corrente ACS712, o chip lógico, o LCD de caracteres etc.O barramento de três volts alimentará os "cérebros" do dispositivo - MK STM32F100C8T6B.Digressão líricaProteuse v 7.7. , . , Dip Trace. . .
Esse esquema nasceu: a imagem é clicável. Os modeladores de barramento de 5 e 3,3 Volts são organizados em estabilizadores LDO a 1% do tipo NCP1117STxx. A fonte de alimentação analógica do módulo ADC é retirada do barramento de 3,3 Volts através de capacitores de indutância, suavização e bloqueio. A terra analógica também deve ser dividida. Mas este não é o caso neste esquema, pois as medições não são críticas e um erro de alguns dígitos não levará a uma "quebra" do dispositivo. Aplicamos um filtro de software - uma média móvel e pode até obter erros em uma categoria.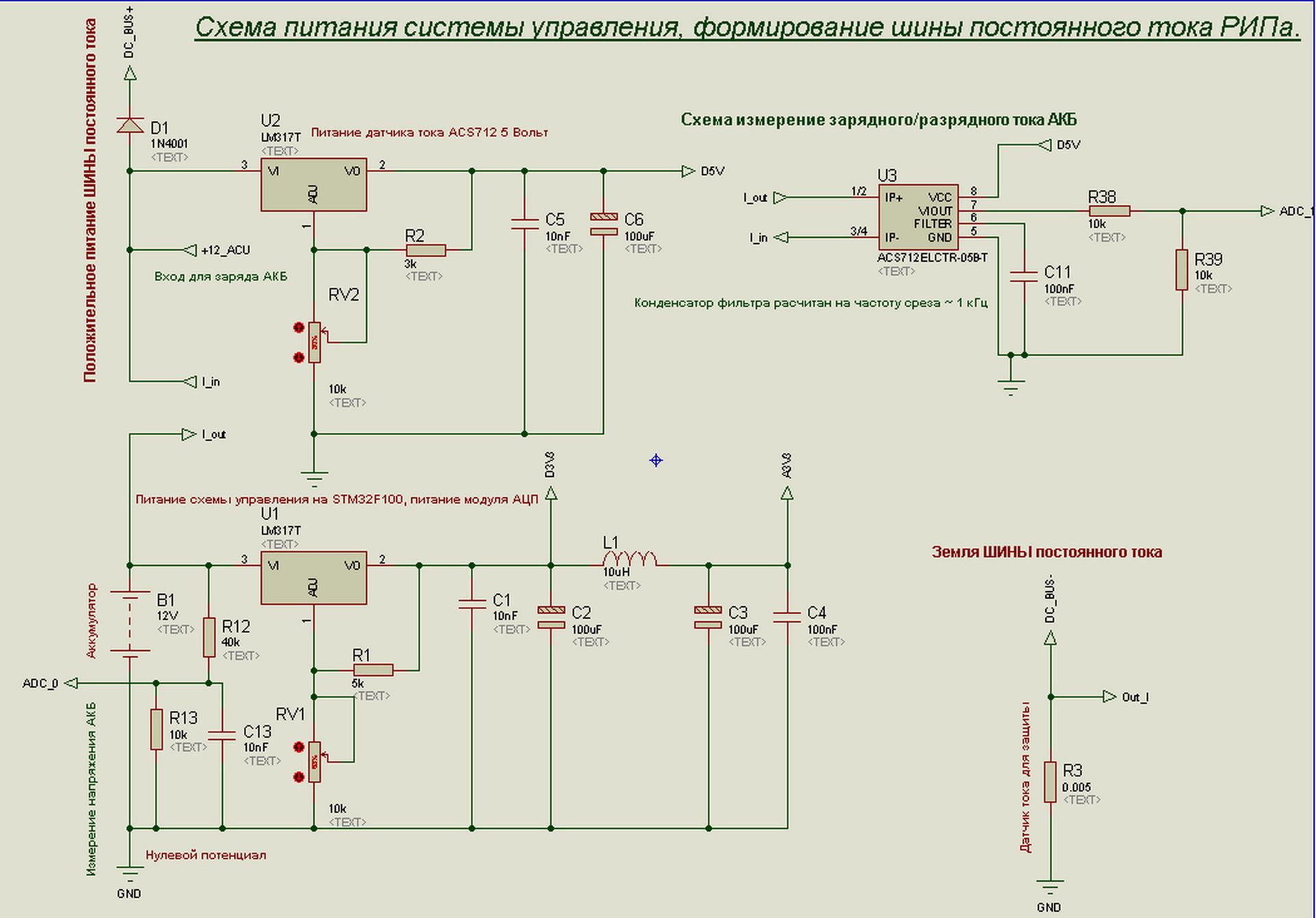
Medição de corrente e proteção contra sobrecarga
O sensor de corrente ACS712ELCTR-05B-T é um circuito integrado. A detecção de corrente ocorre no efeito Hall. Este sensor permite que o MK meça a corrente direta e a reversa. Outras características podem ser encontradas em seu pdf . A saída do sensor é analógica. Ponto médio correspondente à corrente zero = 2,5 V. Ganhe 185mV por 1 Amp. Embora o sensor detecte altas correntes, apenas a linearidade é distorcida e, a uma certa corrente, entra em saturação. Então, para coordenar a saída do sensor com o MK, coloque um divisor de tensão. E divida a escala ao meio. Os bits ADC MK são suficientes para uma precisão aceitável.Para proteção de alta velocidade contra sobrecarga ou curto-circuito no enrolamento de baixa tensão de um transformador linear, instale uma derivação de corrente. O sinal da derivação é forçado no amplificador operacional e no comparador montamos um circuito de comparação com uma trava. Os dados de sobrecarga serão direcionados para o MK, e também com esse sinal fecharemos TODAS as chaves da ponte.Um pequeno vídeo, simulando a operação da proteção atual, é apresentado abaixo.Parte do poder
A parte de energia do RIP é mostrada na figura. A imagem é clicável.
A ponte do transistor "depende" da derivação atual, para fornecer proteção de alta velocidade. A saída da ponte através de um filtro LC, projetada para uma frequência de corte de ~ 1 kHz, é alimentada ao enrolamento de baixa tensão do transformador. Devemos falar sobre o filtro e o transformador em mais detalhes. O cálculo do filtro foi realizado no programa "Calculadora RL", no link chamado off. Não consigo encontrar o site. Portanto, o arquivo com a calculadora postado aqui . Aqui está a tela de cálculo.
 A indutância resultante de 10 milligenry é bastante impressionante. Mas a capacidade era decente. Como temos uma alteração na saída do filtro, você não pode fazer isso com um capacitor polar. Ele colocou dois capacitores de cerâmica em paralelo no circuito - 4,7 microfarads, X7R, 25V (1206).O cálculo do acelerador de acordo com os dados obtidos foi realizado no programa Coil32. Aqui está um link para o arquivo com o programa. Eu escolhi um anel de ferrite para esse estrangulamento com os seguintes parâmetros: Anel N87 R25x15x10. Aqui está a tela de cálculo no programa.
A indutância resultante de 10 milligenry é bastante impressionante. Mas a capacidade era decente. Como temos uma alteração na saída do filtro, você não pode fazer isso com um capacitor polar. Ele colocou dois capacitores de cerâmica em paralelo no circuito - 4,7 microfarads, X7R, 25V (1206).O cálculo do acelerador de acordo com os dados obtidos foi realizado no programa Coil32. Aqui está um link para o arquivo com o programa. Eu escolhi um anel de ferrite para esse estrangulamento com os seguintes parâmetros: Anel N87 R25x15x10. Aqui está a tela de cálculo no programa. Foram produzidas 70 voltas de fio com um diâmetro de 1 mm, para garantir a indutância necessária. É bastante aceitável para corda manual.A escolha do transformador recaiu sobre o transformador toroidal do tipo TTP-60, com uma voltagem secundária de 9 volts. O cálculo é simples. Uma tensão alternada de 9 volts fornece uma amplitude de 12,7 volts. A voltagem de uma bateria carregada é de cerca de 13 volts. Assim, podemos obter mais ou menos 220 volts na saída. Para carregar a bateria, é claro que não é suficiente. Portanto, há uma sugestão para obter o enrolamento secundário das voltas 5-6. Ou seja, um enrolamento de baixa tensão com uma torneira foi acionado. Dos terminais extremos do enrolamento, removemos o aumento da tensão para carregar a bateria durante a operação da rede. E aplicamos tensão da ponte ao terminal extremo e médio quando estamos trabalhando com a bateria. Pela tensão obtida nos terminais extremos do enrolamento, julgamos a tensão no enrolamento de alta tensão durante a operação da bateria, feedback para ajuste.Os transistores de ponte são controlados do MK através dos drivers de meia ponte do IRS2101S. O gerenciamento das teclas superiores é realizado de acordo com o esquema de inicialização. O transistor de carregamento do canal P é controlado por um bipolar convencional. O afogador de carga de suavização possui as mesmas dimensões e valores de design que o afogador no filtro LC após a ponte.
Foram produzidas 70 voltas de fio com um diâmetro de 1 mm, para garantir a indutância necessária. É bastante aceitável para corda manual.A escolha do transformador recaiu sobre o transformador toroidal do tipo TTP-60, com uma voltagem secundária de 9 volts. O cálculo é simples. Uma tensão alternada de 9 volts fornece uma amplitude de 12,7 volts. A voltagem de uma bateria carregada é de cerca de 13 volts. Assim, podemos obter mais ou menos 220 volts na saída. Para carregar a bateria, é claro que não é suficiente. Portanto, há uma sugestão para obter o enrolamento secundário das voltas 5-6. Ou seja, um enrolamento de baixa tensão com uma torneira foi acionado. Dos terminais extremos do enrolamento, removemos o aumento da tensão para carregar a bateria durante a operação da rede. E aplicamos tensão da ponte ao terminal extremo e médio quando estamos trabalhando com a bateria. Pela tensão obtida nos terminais extremos do enrolamento, julgamos a tensão no enrolamento de alta tensão durante a operação da bateria, feedback para ajuste.Os transistores de ponte são controlados do MK através dos drivers de meia ponte do IRS2101S. O gerenciamento das teclas superiores é realizado de acordo com o esquema de inicialização. O transistor de carregamento do canal P é controlado por um bipolar convencional. O afogador de carga de suavização possui as mesmas dimensões e valores de design que o afogador no filtro LC após a ponte.Detecção e comutação de rede
Para detecção de rede, é usado um circuito de potência do capacitor. A voltagem é ligada ao acoplador óptico. A saída do acoplador óptico é direcionada para o MK para controlar a disponibilidade da rede. O diagrama é mostrado abaixo. A imagem é clicável.
Tensão da rede elétrica através de um capacitor de têmpera, diodos, um diodo zener, capacitores de suavização, um resistor limitador de corrente é alimentado ao LED do acoplador óptico. A saída vai para MK. Os relés que trocam a rede para a carga são controlados pelo MK. A proteção atual é implementada no amplificador operacional e no comparador. A saída do comparador diverge em dois transistores. Um para inserir o sinal no MK, o segundo para fechar todos os transistores da ponte. A figura abaixo mostra o circuito de habilitação do driver para a ponte. A imagem é clicável.
Todo padrão, de acordo
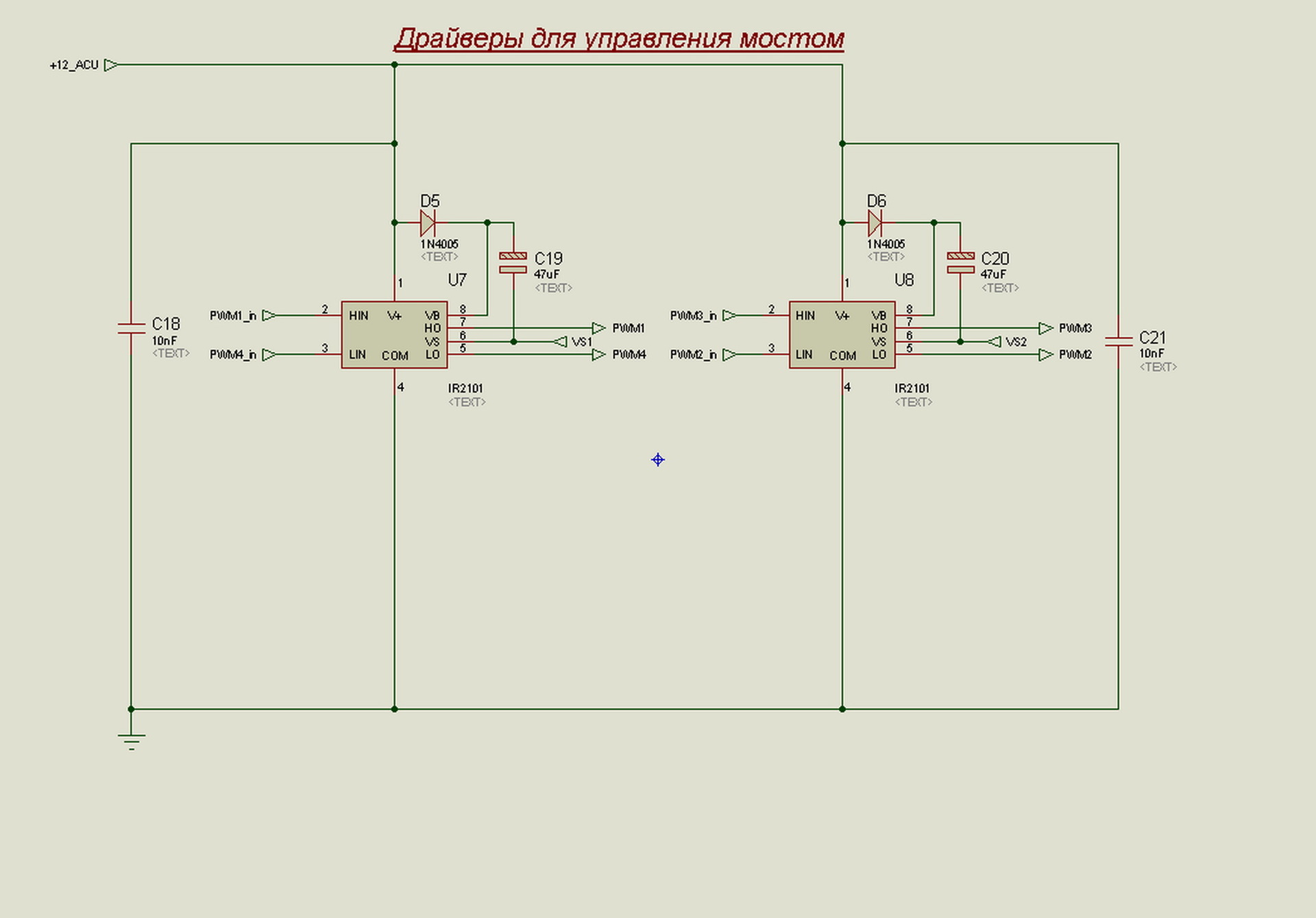 folha de dados para o driver IRS2101S.
folha de dados para o driver IRS2101S.Circuito de modelagem de pulsos em ponte
Para não sobrecarregar o MK com trabalho inútil, a formação de sinais de impulso da ponte é coletada na lógica I. São necessários três sinais do MK. Um PWM senoidal por período, bem como dois sinais discretos, a primeira meia-onda e a segunda. A implementação dessa abordagem é mostrada na figura. A imagem é clicável. Sobrecorrente, estabelecida em MK e duplicada por LED. O controle do transistor de canal P de carregamento é organizado em um transistor NPN bipolar. A lógica da ponte será a seguinte. O PWM de 20 kHz será modulado por uma tabela senoidal na quantidade de 400 valores. A transferência de valores para o registro PWM será organizada através do DMA. Depois de carregar metade do buffer, ou seja, 200 valores, um meio ciclo, o DMA causará uma interrupção, onde os sinais MCU_P_1 e MCU_P_2 se inverterão mutuamente. Após carregar todo o buffer, os sinais MCU_P_1 e MCU_P_2 serão invertidos na interrupção do DMA. E ainda mais em um modo cíclico. Um nível constante de meia onda será fornecido ao transistor do braço e um PWM senoidal à chave inferior do braço oposto. O próximo meio ciclo é outro par de transistores.Durante a sobrecorrente, o transistor NPN Q7 fornecerá um nível baixo na entrada lógica, o que por sua vez levará a um nível baixo na saída lógica e, como resultado, travará TODOS os transistores de ponte.
A lógica da ponte será a seguinte. O PWM de 20 kHz será modulado por uma tabela senoidal na quantidade de 400 valores. A transferência de valores para o registro PWM será organizada através do DMA. Depois de carregar metade do buffer, ou seja, 200 valores, um meio ciclo, o DMA causará uma interrupção, onde os sinais MCU_P_1 e MCU_P_2 se inverterão mutuamente. Após carregar todo o buffer, os sinais MCU_P_1 e MCU_P_2 serão invertidos na interrupção do DMA. E ainda mais em um modo cíclico. Um nível constante de meia onda será fornecido ao transistor do braço e um PWM senoidal à chave inferior do braço oposto. O próximo meio ciclo é outro par de transistores.Durante a sobrecorrente, o transistor NPN Q7 fornecerá um nível baixo na entrada lógica, o que por sua vez levará a um nível baixo na saída lógica e, como resultado, travará TODOS os transistores de ponte.Plataforma de hardware
O barramento de três volts alimentará os "cérebros" do dispositivo - MK STM32F100C8T6B.
Como mencionado acima, o MK será da família ST STM32. O que determina essa escolha?- MK tem um custo baixo. Os análogos de capacidade do ATMEL ou PIC têm preços ainda mais altos, com uma capacidade de 8 bits.
- A presença a bordo do controlador ADC, DAC, DMA de 12 bits.
- Capacidade de núcleo de 32 bits.
- Maior capacidade de memória de programas e dados.
Em uma palavra, ele vence em muitas posições.Para indicar a operação do dispositivo e enviar os dados necessários, um LCD de síntese de sinais com um controlador de controle KS0066 (HD44780) será usado no circuito. Existem muitas bibliotecas para trabalhar com essa exibição no RuNet.O diagrama de conexão do display ao controlador é o seguinte. A imagem é clicável.
A conexão é direta. As portas MK estão conectadas diretamente ao monitor. A conjugação da lógica de 3 e 5 volts não foi realizada. Os problemas podem surgir aqui, e as conclusões do MK terão que ser configuradas como saídas com um coletor aberto, e as linhas devem ser puxadas até 5 volts, e as próprias saídas do MK devem ser usadas tolerantes a 5 volts. Como se costuma dizer, a vida mostrará, mas ao projetar uma placa de circuito impresso, é necessário lançar essa "atualização".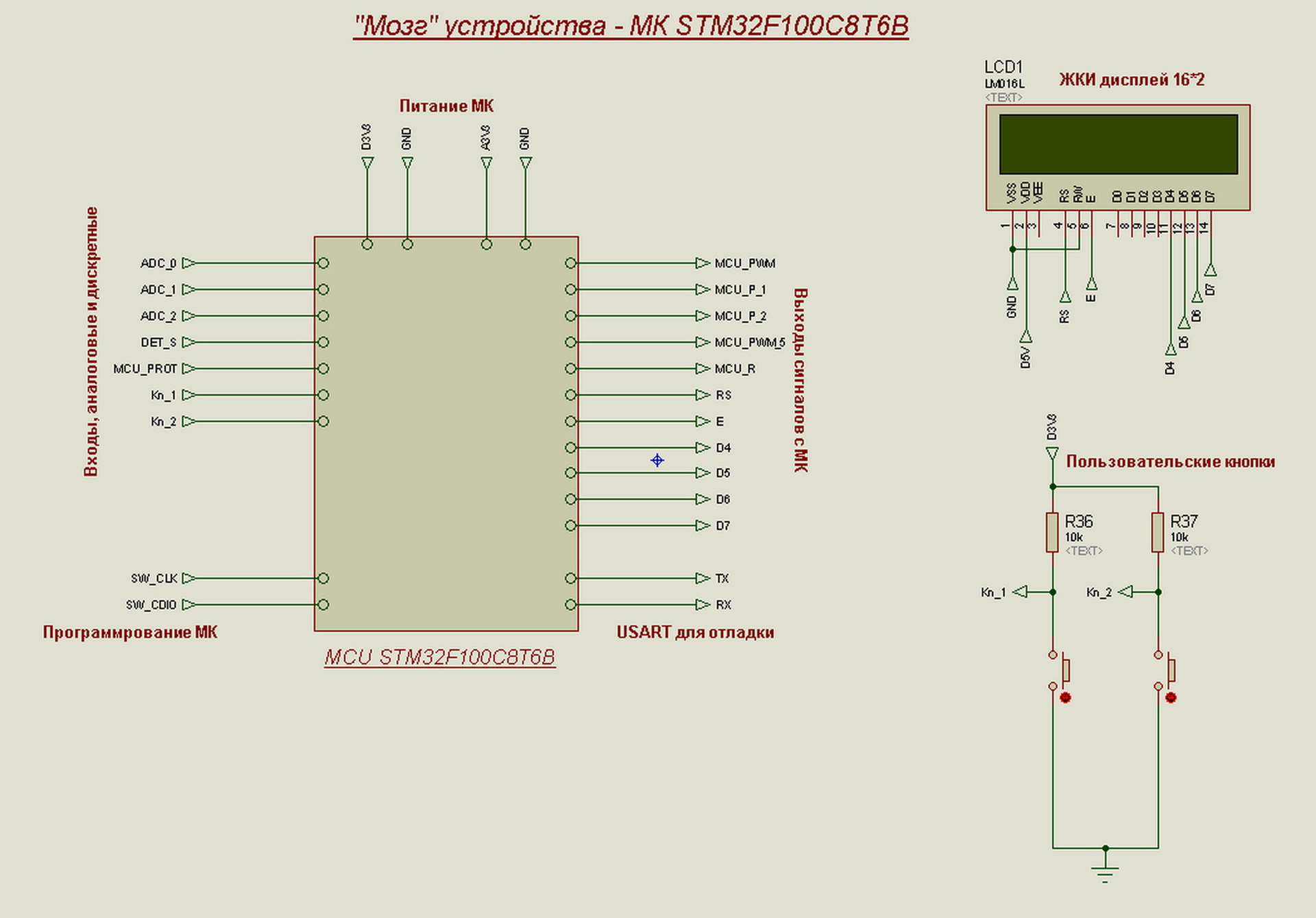 São necessários botões personalizados para organizar a navegação pelos menus e parâmetros exibidos no visor.
São necessários botões personalizados para organizar a navegação pelos menus e parâmetros exibidos no visor.Cálculos adicionais
Para calcular o capacitor de autoinicialização, usamos o método proposto neste artigo . No final da descrição, há um exemplo de cálculo da capacidade necessária de um capacitor de autoinicialização. Tomá-lo como base e recontar nossas realidades.Decidimos sobre os parâmetros do circuito:- V IN, MAX = tensão máxima de entrada de 15V,
- V DRV = tensão de alimentação do driver de 12V e a amplitude do sinal de controle,
- dV BST = tensão de ondulação de 0,5V no capacitor C BST em estado estacionário,
- dVBST,MAX = 3V CBST ,
- fDRV = 100 Hz , 10 ,
- DMAX = 1 .
:- QG = 24 nC IRLZ44ZS VDRV = 5V VDS = 44V,
- RGS = 10 RGS,
- IR = 10uA DBST TJ = 80°C,
- VF = 0.6V DBST 0.1A TJ = 80°C,
- ILK = 0.13mA TJ = 100°C,
- IQBS = 1mA , .
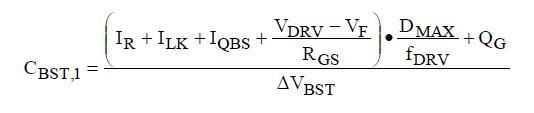
 Selecionamos o valor calculado da série padrão. Pegue o tipo de capacitor tântalo, para reduzir a corrente de fuga do próprio capacitor. No total, resulta 47 μF x 25 V, tipo D.Calculamos a corrente de carga do capacitor, escolhendo assim um diodo.
Selecionamos o valor calculado da série padrão. Pegue o tipo de capacitor tântalo, para reduzir a corrente de fuga do próprio capacitor. No total, resulta 47 μF x 25 V, tipo D.Calculamos a corrente de carga do capacitor, escolhendo assim um diodo. Portanto, um diodo projetado para uma corrente direta de 1 A lidará com essa tarefa.
Portanto, um diodo projetado para uma corrente direta de 1 A lidará com essa tarefa.Conclusão
Este artigo desenvolveu o circuito elétrico do RIP. Agora vamos juntar todas as peças do circuito. E com base no esquema já aprovado, desenvolveremos a topologia da placa de circuito impresso. Apresentarei o layout da placa de circuito impresso e o circuito elétrico generalizado com a especificação dos componentes no próximo artigo.Escreverei a implementação de software da funcionalidade do dispositivo em um artigo separado. Existe uma idéia para implementar no programa muitas soluções interessantes, por exemplo, regulação PID da tensão de saída ao trabalhar com a bateria.Epílogo
Com este artigo, eu queria levar ao tribunal o público e os presuntos experientes e não amadores, também, soluções esquemáticas. Talvez um leitor atento encontre erros críticos nos circuitos ou sugira uma execução mais correta de nós individuais. Haverá uma solução mais simples para os nós ou para adicionar soluções de circuito adicionais para aumentar a confiabilidade.PSLinks para todas as partes do ciclo:- Desenvolvimento de uma fonte de alimentação de backup de baixa potência com uma saída senoidal. Parte 1. Declaração do problema.
- Desenvolvimento de uma fonte de alimentação de backup de baixa potência com uma saída senoidal. Parte 2. Desenvolvimento de um diagrama de circuito elétrico.
- Desenvolvimento de uma fonte de alimentação de backup de baixa potência com uma saída senoidal. Parte 3. Trabalhar com erros