Pensamentos em voz alta. Quatro é melhor que um ... Ou o conceito de quadrocopter de transporte
O artigo destaca as deficiências fundamentais de uma aeronave, como um helicóptero, e sua solução é proposta. A possível aplicação desse conceito em sistemas e complexos robóticos é considerada. A abordagem descrita não afirma ser inequívoca e precisa, e o artigo visa compartilhar uma ideia técnica com os leitores de GT.DECLARAÇÃO DO PROBLEMA
Aeronave (LA) é uma máquina ou dispositivo para voar na atmosfera ou no espaço sideral. No momento, a classificação das aeronaves possui uma enorme variedade de tipos e tipos de aeronaves, dentre elas muitas podem ser identificadas como um dos tipos de aeronaves mais amplamente utilizados - o helicóptero.Vamos destacar as principais deficiências do helicóptero como uma classe:- a dificuldade de carregar mercadorias e equipamentos de grandes dimensões devido ao compartimento de carga estreito,
- a aterrissagem é possível apenas na ausência de rolagem lateral devido à fuselagem estreita e a uma área varrida pelo rotor.
Para ilustrar 3 e 4 deficiências, consideramos um helicóptero de transporte Mi-26 (Fig. 1). Figura 1 - Helicóptero Mi-26 em três projeçõesA largura do compartimento de carga do helicóptero é de 320 cm, para comparação, a largura do veículo blindado de transporte de pessoal BTR-70 é de 280 cm, respectivamente, há um espaço de 20 cm entre cada lado do transportador e a parede do compartimento de carga do helicóptero, que é um fator negativo ao carregar equipamentos com essas dimensões (Fig. 2, à direita). A Figura 2 (esquerda) ilustra a complexidade do processo de carregamento usando uma empilhadeira.A presença desse fator introduz inconveniência ao usar helicópteros no transporte de carga civil e é crítica ao usar essas aeronaves em emergências e operações militares.
Figura 1 - Helicóptero Mi-26 em três projeçõesA largura do compartimento de carga do helicóptero é de 320 cm, para comparação, a largura do veículo blindado de transporte de pessoal BTR-70 é de 280 cm, respectivamente, há um espaço de 20 cm entre cada lado do transportador e a parede do compartimento de carga do helicóptero, que é um fator negativo ao carregar equipamentos com essas dimensões (Fig. 2, à direita). A Figura 2 (esquerda) ilustra a complexidade do processo de carregamento usando uma empilhadeira.A presença desse fator introduz inconveniência ao usar helicópteros no transporte de carga civil e é crítica ao usar essas aeronaves em emergências e operações militares.
 Figura 2 - O processo de carregamento com uma empilhadeira (esquerda), carregamento do BTR-70 (direita)
Figura 2 - O processo de carregamento com uma empilhadeira (esquerda), carregamento do BTR-70 (direita)RESOLVER O PROBLEMA
Um quadcopter é uma aeronave com quatro rotores que giram na diagonal em direções opostas. Esse layout de rotores permite realizar uma aeronave com uma fuselagem mais larga do que em helicópteros (Fig. 3), e a presença de quatro rotores fornecerá quatro zonas de varredura, o que permitirá o pouso e a decolagem com o rolo lateral.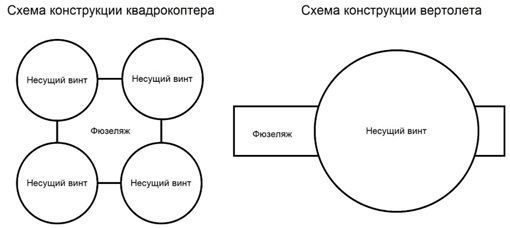 Figura 3 - Diagrama de blocos dos projetos do quadrocóptero e helicópteroAo usar esse esquema, unidades como sistema de combustível, sistema de controle, sistema de radar e componentes elétricos estão localizadas na parte superior da fuselagem em uma cápsula blindada especial (Fig. 4). Esse arranjo de nós permite colocar escotilhas nos compartimentos de carga e rampas de carga em qualquer um dos 5 lados da fuselagem (Fig. 5): dos quatro lados e da parte inferior (escotilha de carregamento vertical).
Figura 3 - Diagrama de blocos dos projetos do quadrocóptero e helicópteroAo usar esse esquema, unidades como sistema de combustível, sistema de controle, sistema de radar e componentes elétricos estão localizadas na parte superior da fuselagem em uma cápsula blindada especial (Fig. 4). Esse arranjo de nós permite colocar escotilhas nos compartimentos de carga e rampas de carga em qualquer um dos 5 lados da fuselagem (Fig. 5): dos quatro lados e da parte inferior (escotilha de carregamento vertical).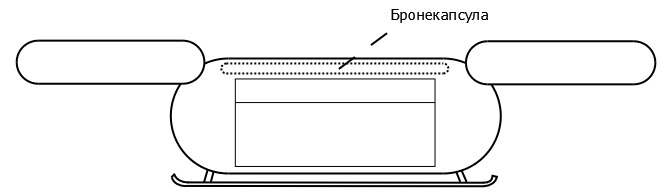 Figura 4 - Localização da cápsula blindada
Figura 4 - Localização da cápsula blindada Figura 5 - Colocação das escotilhas de carga
Figura 5 - Colocação das escotilhas de cargaDESVANTAGENS DE DECISÃO
A abordagem considerada possui as seguintes desvantagens:- vulnerabilidade do motor do rotor,
- pequeno volume do tanque de combustível devido à colocação na parte superior da fuselagem.
Possíveis soluções:- colocação de rotores em barquinhas especiais e placas blindadas que cobrem os motores (Fig. 7)
- colocação de tanques de combustível na parte externa da fuselagem da aeronave.
 Figura 7 - Colocação dos rotores
Figura 7 - Colocação dos rotoresAPLICAÇÃO DE CONCEITO EM
SISTEMAS E COMPLEXOS ROBÓTICOS
Veículo aéreo não tripulado (UAV) - uma aeronave sem tripulação a bordo, implementada usando robótica. A implementação do quadrocóptero de carga, como UAV, é aconselhável:- em complexos robóticos, por exemplo, como parte de um sistema robótico de transporte e logística (processo totalmente automático de armazenamento e transporte de mercadorias);
- como sistema independente, para uso em condições de maior perigo para a vida do piloto (emergência, operações militares);
- como um sistema independente para resolver tarefas que exigem um grande número de aeronaves e um alto grau de eficiência (operações militares, transporte de carga, atendimento médico de emergência).
Com base na aplicação acima de um UAV de carga, consideramos as possíveis implementações de sistemas de controle de aeronaves usando abordagens clássicas.Gerenciamento centralizado com um operador humano (comunicação individual) Estrutura do sistema de gerenciamento:- operador humano
- terminal remoto
- Aeronaves com um sistema inteligente de processamento de informações a bordo.
Todo o processo de controle da aeronave é implementado pelo operador através do terminal, o sistema de processamento de informações a bordo analisa as informações dos sensores e emite alertas ao operador quando os parâmetros se desviam da norma, prediz possíveis situações de emergência, ou seja, É um sistema especialista dinâmico.Gerenciamento centralizado com uma sala de controle (comunicação um para muitos). Estrutura do sistema de gerenciamento:- operador humano
- terminal remoto
- uma ou um grupo de aeronaves com um sistema de controle inteligente a bordo.
O operador humano através do terminal implementa o planejamento de rotas, define destinos, monitora a exatidão das tarefas, o estado da aeronave, ou seja, executa as funções de um expedidor. O sistema de controle a bordo controla a aeronave no modo automático. Com essa abordagem, muitas aeronaves podem ser controladas pelo operador.Gerenciamento descentralizado (relacionamento muitos para muitos). Estrutura do sistema de gerenciamento:- fontes de solicitação (pessoa, sistema técnico),
- Grupo de LA com sistema de controle inteligente a bordo.
As fontes da solicitação geram solicitações de serviço. O grupo de aeronaves processa os dados do aplicativo e realiza o serviço com base nas prioridades dos aplicativos e no local relativo da aeronave e nas fontes de solicitação. Nesta abordagem, são utilizados os princípios de controle de grupo de robôs: interrogação (com a definição do nó principal ou estação base), uma rede em anel com acesso a token ou um caso especial de uma rede em anel - uma rede de ônibus. Source: https://habr.com/ru/post/pt391105/
All Articles