Disney Research Robotics desenvolve unidade híbrida de próxima geração
 Um grupo de engenheiros robóticos da Disney Research e convidados especialistas entusiasmados criaram um robô com uma nova geração de acionamentos hidrostáticos que permitem uma simulação surpreendentemente precisa e suave dos movimentos humanos. Os acionamentos inovadores que combinam elementos pneumáticos e hidráulicos no projeto são capazes de fornecer aos movimentos do robô uma precisão significativamente maior dos movimentos, a capacidade de capturar e segurar delicadamente objetos frágeis.Existem dois tipos principais de sistemas de motor que suportam a atividade motora do robô - pneumática e hidráulica. Cada um deles tem suas próprias vantagens, mas também enfrenta uma série de limitações técnicas que determinam o nível de feedback e controle dos movimentos feitos pelo robô.Portanto, os sistemas hidráulicos dão força a qualquer máquina Hercules, fornecem uma precisão suficientemente alta dos movimentos e oferecem oportunidades para a implementação e configuração flexível de feedbacks. Ao mesmo tempo, esses sistemas não são compactos e pesados, são 100% dependentes de fontes de energia externas. Um sistema pneumático simples e confiável não implica uma fonte de alimentação externa, mas impõe restrições bastante sérias no layout das rotas de cabos e motores, demonstra baixa qualidade de feedback e oferece um mínimo de recursos de controle. Os sistemas elétricos, de acordo com o nível de capacidades reveladas, ocupam uma posição intermediária.Um grupo de pesquisadores da Disney Research, que criou uma unidade híbrida, já está familiarizado com a comunidade profissional de criação de robôs usando as tecnologias mais avançadas, incluindo Microsoft Kinect, Xtion Pro Live da ASUS e outros.Os engenheiros da empresa introduziram seu robô, que habilmente está jogando bolas com humanos, em 2012 ano.Outro exemplo é o robô de engenheiros japoneses, capaz de manipular com precisão e rapidez com uma mão, demonstrado pelos desenvolvedores na Conferência Internacional de Robótica e Automação IEEE de 2012 (Conferência Internacional de Robótica e Automação IEEE de 2012, ICRA).Agora, uma equipe de engenheiros da Disney Research liderada por John P. Whitney da Northeastern University desenvolveu um acionamento hidráulico-pneumático exclusivo que combina as vantagens dos sistemas pneumáticos e hidráulicos que ainda são usados separadamente. No novo acionamento, em vez de juntas totalmente controladas por um par de válvulas hidráulicas, o movimento em uma determinada direção é realizado pela hidráulica e o retorno à sua posição original é realizado pela pneumática. Essa solução nos permitiu simplificar significativamente o design do inversor e usar os recursos da pneumática, atuando como um amortecedor adicional, para fornecer movimentos com maior suavidade e naturalidade.
Um grupo de engenheiros robóticos da Disney Research e convidados especialistas entusiasmados criaram um robô com uma nova geração de acionamentos hidrostáticos que permitem uma simulação surpreendentemente precisa e suave dos movimentos humanos. Os acionamentos inovadores que combinam elementos pneumáticos e hidráulicos no projeto são capazes de fornecer aos movimentos do robô uma precisão significativamente maior dos movimentos, a capacidade de capturar e segurar delicadamente objetos frágeis.Existem dois tipos principais de sistemas de motor que suportam a atividade motora do robô - pneumática e hidráulica. Cada um deles tem suas próprias vantagens, mas também enfrenta uma série de limitações técnicas que determinam o nível de feedback e controle dos movimentos feitos pelo robô.Portanto, os sistemas hidráulicos dão força a qualquer máquina Hercules, fornecem uma precisão suficientemente alta dos movimentos e oferecem oportunidades para a implementação e configuração flexível de feedbacks. Ao mesmo tempo, esses sistemas não são compactos e pesados, são 100% dependentes de fontes de energia externas. Um sistema pneumático simples e confiável não implica uma fonte de alimentação externa, mas impõe restrições bastante sérias no layout das rotas de cabos e motores, demonstra baixa qualidade de feedback e oferece um mínimo de recursos de controle. Os sistemas elétricos, de acordo com o nível de capacidades reveladas, ocupam uma posição intermediária.Um grupo de pesquisadores da Disney Research, que criou uma unidade híbrida, já está familiarizado com a comunidade profissional de criação de robôs usando as tecnologias mais avançadas, incluindo Microsoft Kinect, Xtion Pro Live da ASUS e outros.Os engenheiros da empresa introduziram seu robô, que habilmente está jogando bolas com humanos, em 2012 ano.Outro exemplo é o robô de engenheiros japoneses, capaz de manipular com precisão e rapidez com uma mão, demonstrado pelos desenvolvedores na Conferência Internacional de Robótica e Automação IEEE de 2012 (Conferência Internacional de Robótica e Automação IEEE de 2012, ICRA).Agora, uma equipe de engenheiros da Disney Research liderada por John P. Whitney da Northeastern University desenvolveu um acionamento hidráulico-pneumático exclusivo que combina as vantagens dos sistemas pneumáticos e hidráulicos que ainda são usados separadamente. No novo acionamento, em vez de juntas totalmente controladas por um par de válvulas hidráulicas, o movimento em uma determinada direção é realizado pela hidráulica e o retorno à sua posição original é realizado pela pneumática. Essa solução nos permitiu simplificar significativamente o design do inversor e usar os recursos da pneumática, atuando como um amortecedor adicional, para fornecer movimentos com maior suavidade e naturalidade.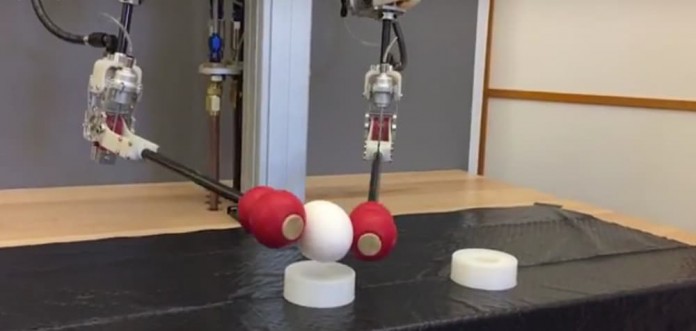 O acionamento híbrido proposto pelos engenheiros usava um único motor, o sistema hidráulico é bastante facilitado. Como resultado, todo o design acabou sendo rápido, fácil e preciso. Outra vantagem do sistema híbrido proposto, em comparação com os sistemas robóticos que operam com sistemas hidráulicos limpos, é a ausência de uma dependência estrita da fonte de alimentação. O suprimento residual de ar comprimido na parte pneumática do sistema pode executar uma quantidade limitada de trabalho útil. Assim, um cirurgião-robô com acionamentos semelhantes em caso de falha do complexo do laboratório de alimentação poderá retornar o braço com o instrumento à sua posição original, liberando o acesso do cirurgião humano ao corpo do paciente.Para testes de bancada, os engenheiros prepararam o sistema híbrido de protótipo mais simples sem membros inferiores. A parte superior do robô humanóide possui dois manipuladores com quatro graus de liberdade para cada um. Câmeras estereoscópicas em miniatura são instaladas na cabeça do robô, proporcionando ao robô a possibilidade de contato visual com o ambiente e, no caso de alternar para o controle remoto, a capacidade de transmitir uma imagem da realidade a um operador humano.O controle remoto do robô é possível graças aos controladores manuais especiais que fornecem feedback. Usando um capacete de realidade virtual, o operador "apaga a linha" entre ele e o robô. O último neste caso repete com precisão os movimentos da pessoa, e a pessoa vê tudo o que acontece na frente do olho da câmera do robô. A precisão da repetição de movimentos e a resolução do feedback são tais que uma pessoa, operando com as mãos de um robô, poderá enfiar uma agulha no olho e realizar manipulações ultraprecisas semelhantes. Ao mesmo tempo, a velocidade do movimento, a velocidade da reação e o nível de coordenação serão suficientes para fazer manipulações rápidas - pegar a bola jogada, etc.
O acionamento híbrido proposto pelos engenheiros usava um único motor, o sistema hidráulico é bastante facilitado. Como resultado, todo o design acabou sendo rápido, fácil e preciso. Outra vantagem do sistema híbrido proposto, em comparação com os sistemas robóticos que operam com sistemas hidráulicos limpos, é a ausência de uma dependência estrita da fonte de alimentação. O suprimento residual de ar comprimido na parte pneumática do sistema pode executar uma quantidade limitada de trabalho útil. Assim, um cirurgião-robô com acionamentos semelhantes em caso de falha do complexo do laboratório de alimentação poderá retornar o braço com o instrumento à sua posição original, liberando o acesso do cirurgião humano ao corpo do paciente.Para testes de bancada, os engenheiros prepararam o sistema híbrido de protótipo mais simples sem membros inferiores. A parte superior do robô humanóide possui dois manipuladores com quatro graus de liberdade para cada um. Câmeras estereoscópicas em miniatura são instaladas na cabeça do robô, proporcionando ao robô a possibilidade de contato visual com o ambiente e, no caso de alternar para o controle remoto, a capacidade de transmitir uma imagem da realidade a um operador humano.O controle remoto do robô é possível graças aos controladores manuais especiais que fornecem feedback. Usando um capacete de realidade virtual, o operador "apaga a linha" entre ele e o robô. O último neste caso repete com precisão os movimentos da pessoa, e a pessoa vê tudo o que acontece na frente do olho da câmera do robô. A precisão da repetição de movimentos e a resolução do feedback são tais que uma pessoa, operando com as mãos de um robô, poderá enfiar uma agulha no olho e realizar manipulações ultraprecisas semelhantes. Ao mesmo tempo, a velocidade do movimento, a velocidade da reação e o nível de coordenação serão suficientes para fazer manipulações rápidas - pegar a bola jogada, etc. "Os novos drives híbridos proporcionam ao robô incrível suavidade e velocidade de movimento, permitindo manipular objetos frágeis, interagir com pessoas ou animais e realizar operações muito delicadas", disse Jessica Hodgins, vice-presidente da Disney Research e professora de robótica na Carnegie University - Melone, - “Agora o robô pode trabalhar apenas com a ajuda do controle remoto. Mas ele pode, mantendo todos os parâmetros do movimento mecânico, agir de modo automático. E o trabalho nessa direção já está sendo realizado por nossos especialistas. ”Os desenvolvedores pretendem contar com mais detalhes sobre as novas unidades híbridas, suas características e perspectivas para uso em robótica na Conferência Internacional IEEE de Robótica e Automação ICRA 2016 (Conferência IEEE de Robótica e Automação) em Estocolmo.Fonte
"Os novos drives híbridos proporcionam ao robô incrível suavidade e velocidade de movimento, permitindo manipular objetos frágeis, interagir com pessoas ou animais e realizar operações muito delicadas", disse Jessica Hodgins, vice-presidente da Disney Research e professora de robótica na Carnegie University - Melone, - “Agora o robô pode trabalhar apenas com a ajuda do controle remoto. Mas ele pode, mantendo todos os parâmetros do movimento mecânico, agir de modo automático. E o trabalho nessa direção já está sendo realizado por nossos especialistas. ”Os desenvolvedores pretendem contar com mais detalhes sobre as novas unidades híbridas, suas características e perspectivas para uso em robótica na Conferência Internacional IEEE de Robótica e Automação ICRA 2016 (Conferência IEEE de Robótica e Automação) em Estocolmo.Fonte
Isso é tudo, com você, havia um serviço simples para escolher equipamentos Dronk.Ru complexos . Não se esqueça de se inscrever no nosso blog , haverá muitas outras coisas interessantes ...
Source: https://habr.com/ru/post/pt394609/
All Articles