Drone de corrida FPV DIY (parte 1) - montagem
Hoje, a popularidade das corridas com drones está crescendo rapidamente. Os folhetos amadores crescem em sérias competições internacionais e o número de pessoas envolvidas nesse hobby cresce em progressão. Eu mesmo montei recentemente um quadrocóptero FPV do tamanho 180 (a distância em mm entre os eixos dos motores na diagonal) e me apressei em compartilhar essa experiência. Descrevi todo o processo de montagem e configuração aqui e aqui , e abaixo será uma versão ligeiramente modificada contendo mais informações dos meus artigos anteriores.Vou deixar de fora a questão de ingressar nesse hobby e ir diretamente para o quadrocóptero.
Descrevi todo o processo de montagem e configuração aqui e aqui , e abaixo será uma versão ligeiramente modificada contendo mais informações dos meus artigos anteriores.Vou deixar de fora a questão de ingressar nesse hobby e ir diretamente para o quadrocóptero.Seleção do tamanho do Quadrotor
Um ano atrás, quadrocopters do tamanho 250 eram os mais populares. Mas agora, os pilotos preferem montar dispositivos menores, o que é bastante razoável: o peso é menor, mas o poder é o mesmo. Escolhi o tamanho 180, não por razões práticas, mas como uma espécie de desafio de montagem.De fato, essa abordagem de seleção não está totalmente correta. É muito mais sensato escolher o tamanho das hélices primeiro e já abaixo delas - o menor quadro em que as hélices selecionadas se encaixam. E com essa abordagem, o 180º formato geralmente é rejeitado. Julgue por si mesmo: o formato 210 permite que você coloque as mesmas hélices de 5 polegadas que a 250, enquanto o quadric em si é mais fácil e as hélices de 4 polegadas se encaixam nos 160 quadros. Acontece que o tamanho 180 é um formato tão intermediário, que não é "nem nosso nem seu". Também pode ser considerado 160º ponderado. Mas, no entanto, eu escolhi. Talvez porque esse seja o tamanho mínimo que pode mais ou menos confortavelmente puxar a câmera GoPro ou Runcam.Acessórios
Vamos começar com os motores. A “intermediação” do tamanho 180, bem como a riqueza de sua variedade, complica a escolha. Por um lado, você pode pegar o que se passa na 160ª, por outro lado, o que está instalado na 210ª ou na 250ª. É necessário proceder das hélices e da bateria (o número de latas). Não vejo razão para usar uma bateria 3S e, para hélices, as regras gerais são as seguintes:- precisa de impulso estático máximo - aumente o diâmetro da hélice e diminua o passo (dentro de limites razoáveis)
- precisa de alta velocidade - reduza o diâmetro e aumente a etapa (dentro de limites razoáveis)
- você precisa de um impulso alto com um diâmetro pequeno - adicione o número de pás (novamente dentro de limites razoáveis, pois se a diferença entre as hélices de duas e três pás for palpável, então entre as hélices de três e quatro pás não será tão grande)
No meu caso, tenho um limite de tamanho de hélice de 4 polegadas, mas não tenho um limite de motor. Portanto, é mais razoável usar hélices de bullnose 4045 de três pás. Eles são difíceis de equilibrar, mas com eles os controles são mais responsivos e previsíveis, e o som é mais silencioso. Por outro lado, com hélices de duas pás, a velocidade do quadrocóptero é maior, mas eu definitivamente não preciso disso. "Popularmente" nos anos 180, prevalecem as seguintes configurações:- leve com motores 1306-3100KV, hélices 4045 convencionais e bateria de 850mAh
- pesado e poderoso para hélices bullnose de três pás e uma câmera de ação com motores 2205-2600KV e uma bateria de 1300mAh
De fato, o quadro permite que você coloque motores de 1306-4000KV a 22XX-2700KV. A propósito, não sei por que, mas os motores 1806-2300KV agora estão em desgraça e são pouco usados.Peguei os motores para o meu quadric - RCX H2205 2633KV . Em primeiro lugar, eu queria ter uma margem de poder (embora com minhas modestas habilidades de pilotagem, não esteja claro o porquê). Em segundo lugar, minhas configurações nunca foram superluzes, além disso, também planejo carregar uma câmera de ação. Especificamente, os motores RCX são uma opção de compromisso. Eles são baratos, mas há muitas reclamações sobre a qualidade. No momento da compra dos componentes, esses eram um dos poucos motores de 2205 a 2600KV no mercado. Agora (no momento da redação), o intervalo é muito maior e é melhor escolher outra coisa.Com o restante dos componentes, ele agiu com base no princípio de "mais desafio":- RC180 V2. ( 2-3 ), , 3. , , , , 1-2 .
- FrSky D4R-II. FrSky X4R-SB, , . , . .
- FVT LittleBee 20A — , . - FVT LittleBee 20A PRO Silabs F396 ( , Silabs F330), FVT LittleBee 20A-S, BLHeli_S. LittleBee 20A.
- Foxeer FX799T — , .
- Sony Super HAD CCD 600TVL (IR Block, NTSC, 2.8). Foxeer XAT600M, .
- Diatone.
- -«» BeeRotor -.
- MICRO MinimOSD.
- , . Matek Mini Power Hub, . , 3S, PBD .
- Turnigy nano-tech 1300mAh 4S 45~90C.
- ZG 12Bit WS2812B LED Board. , , - ( ) . .
- DYS 3-blade 4040 Bullnose.
Seleção do controlador de vôo
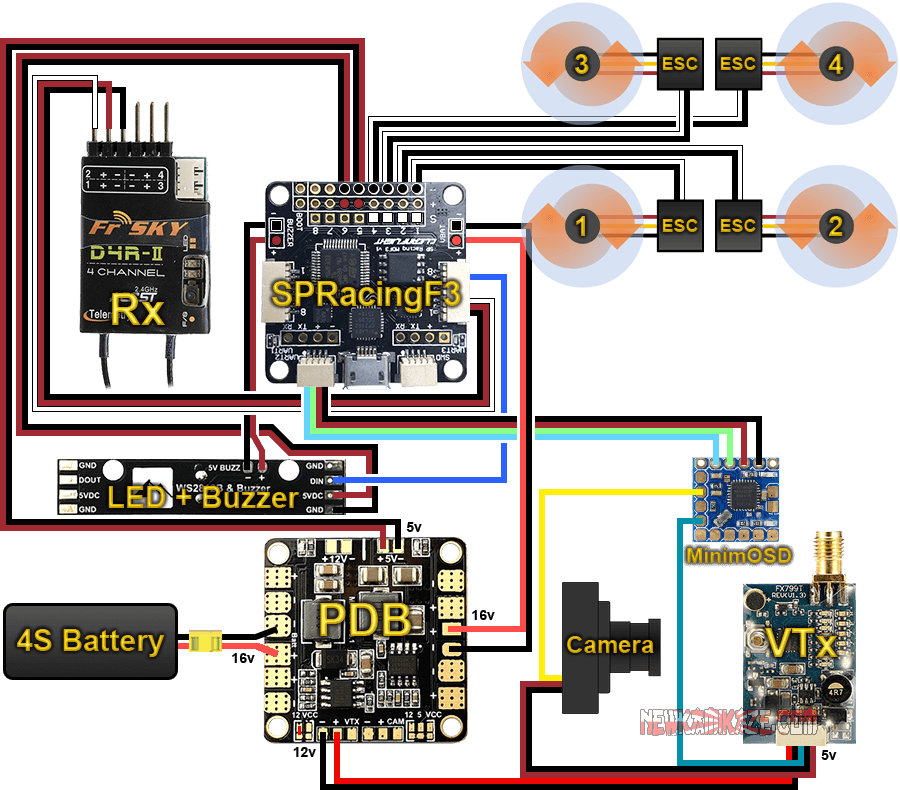
Você provavelmente notou que não há um controlador de vôo na lista. Quero descrever sua escolha com mais detalhes. Os kits de construção de baixo custo geralmente incluem um controlador CC3D, então, neste momento, este é provavelmente o PC mais barato. Hoje, não faz absolutamente sentido comprar um CC3D. Está desatualizado e não possui itens necessários como monitoramento da bateria e "tweeter". Seu sucessor, o CC3D Revolution, é um produto completamente diferente, com recursos avançados, mas também custa mais de 40 €.Os controladores de vôo modernos já mudaram dos processadores F1 para a F3, que fabricou os PCs Naze32 de última geração e reduziram significativamente seu preço. Agora é realmente um controlador popular que tem quase tudo o que a alma deseja a um preço de 12 € ou mais.Da nova geração de PCs, o Seriously Pro Racing F3 é o mais popular e, primeiro de tudo, devido à disponibilidade de clones baratos. O próprio controlador não é de forma alguma inferior ao Naze32, além disso, possui um processador F3 rápido, uma grande quantidade de memória, três portas UART e um inversor para o S.Bus. Foi o SPRacingF3 Acro que eu escolhi. O restante dos PCs modernos não foi considerado por causa do preço ou de alguns recursos específicos (firmware fechado, layout etc.)observarei separadamente a tendência atual da moda de combinar várias placas em uma. Na maioria das vezes, PC e OSD ou PC e PDB I não apoiam essa idéia com algumas exceções. Não quero mudar o controlador de vôo inteiro devido a um OSD queimado. Além disso, como mostra a prática, algumas vezes essa união traz problemas .Diagrama de fiação
É claro que todos os componentes que precisam de energia de 5V ou 12V receberão dos BECs do painel de distribuição de energia. Teoricamente, a câmera poderia ser alimentada diretamente de uma bateria 4S, já que a tensão de entrada permite isso, mas em nenhum caso isso deve ser feito. Em primeiro lugar, todas as câmeras são muito suscetíveis a ruídos no circuito dos reguladores, o que resultará em interferência na imagem. Em segundo lugar, os reguladores com frenagem ativa (como minha LittleBee), quando essa frenagem é ativada, dão um impulso muito sério à rede de bordo, que pode queimar a câmera. Além disso, a presença de um pulso depende diretamente do desgaste da bateria. Os novos não, mas os antigos. Aqui está um vídeo informativo sobre o assunto de interferências dos reguladores e como filtrá-los. Portanto, é melhor ligar a câmera a partir do BEC ou de um transmissor de vídeo.Além disso, para melhorar a qualidade da imagem, é recomendável usar não apenas um fio de sinal da câmera no OSD, mas também o terra. Se você torcer esses fios em uma “trança”, a “terra” atuará como uma tela para o fio de sinal. Verdade, neste caso, eu não fiz.Se já estamos falando sobre o "terra", geralmente é discutido se devemos conectar o "terra" dos reguladores a um PC ou apenas um fio de sinal. Em um quadrocopter de corrida convencional, você definitivamente precisa se conectar. Sua ausência pode levar a falhas de sincronização ( confirmação ).O diagrama final da fiação acabou simples e conciso, mas com algumas nuances:- fornecimento de controlador de voo (5V) do PDB através de saídas para reguladores
- energia ao rádio (5V) do PC através do conector OI_1
- fonte de alimentação de um transmissor de vídeo (12V) do PDB
- energia da câmera (5V) de um transmissor de vídeo
- OSD conectado ao UART2. Muitas pessoas usam o UART1 para isso, mas, como no Naze32, esse conector é paralelo ao USB.
- O Vbat está conectado ao PC, não ao OSD. Em teoria, as leituras de voltagem da bateria (vbat) podem ser lidas no OSD e no PC, conectando a bateria a um ou outro. Qual a diferença? No primeiro caso, as leituras estarão presentes apenas na tela do monitor ou dos óculos e o PC não saberá nada sobre eles. No segundo caso, o PC pode monitorar a tensão da bateria, informar o piloto sobre ela (por exemplo, “squeaker”) e também transferir esses dados para o OSD, para a “caixa preta” e por telemetria para o controle remoto. Ajustar a precisão das leituras também é mais fácil através de um PC. Ou seja, é muito preferível conectar o vbat ao controlador de vôo.
Assembléia
Para começar, aqui estão algumas dicas de montagem geral:- . , .
- , , , . , , . , .
- PLASTIK 71, . , , .
- . .
- «» ().
Eu prefiro iniciar a montagem com motores e reguladores. Aqui está um bom vídeo sobre a montagem de um pequeno quadrocóptero, a partir do qual adotei a idéia de organizar os fios dos motores.Eu também gostaria de dizer sobre a montagem dos reguladores: onde e com o quê? Eles podem ser fixados sob e sob o feixe. Escolhi a primeira opção, pois me parece que nesta posição o regulador está mais protegido (essas são minhas especulações, não confirmadas pela prática). Além disso, quando montado em uma viga, o regulador é perfeitamente resfriado pelo ar da hélice. Agora, sobre como consertar o regulador. Existem muitas maneiras, as mais populares - fita dupla face + uma ou duas mesas. “Barato e alegre”, além disso, desmontar as dificuldades não causará. Pior ainda, com esse prendedor, você pode danificar a placa reguladora (se você colocar um acoplador) ou os fios (se você os prender). Por isso, decidi prender os reguladores com um tubo termo-retrátil (25 mm) e soldá-los juntamente com as vigas. Há uma ressalva: o próprio regulador também deve estar em retração térmica (a mina foi vendida nele),para não entrar em contato com a fibra de carbono do feixe, caso contrário - curto-circuito. Também faz sentido colar um pedaço de fita dupla face de baixo em cada viga no suporte do motor. Em primeiro lugar, protegerá o mancal do motor contra poeira. Em segundo lugar, se por algum motivo um dos parafusos for desaparafusado, ele não cairá durante o vôo e não será perdido.Ao montar a estrutura, não usei um único parafuso do kit, pois todos são indecentemente curtos. Em vez disso, fiquei um pouco mais e com uma cabeça para uma chave de fenda Phillips (há uma preferência pessoal).A câmera não ajustou a largura entre as chapas laterais do quadro. Processou levemente as bordas de sua prancha com um arquivo (era mais provável que moesse aspereza) e ela se levantou sem problemas. Mas as dificuldades não terminaram aí. Gostei muito da qualidade do suporte para a câmera da Diatone, mas a câmera com ela não se encaixava no quadro em altura (cerca de 8 a 10 mm). Primeiro, prendi o suporte no lado externo (superior) da placa através de um amortecedor de neoprene, mas o design acabou não sendo confiável. Mais tarde, surgiu a idéia da fixação mais simples e confiável. Peguei apenas um grampo do suporte de Diatone e coloquei em um pedaço de haste com rosca M3. Para impedir que a câmera se mova para o lado, consertei o grampo com acoplamentos de nylon.
Também faz sentido colar um pedaço de fita dupla face de baixo em cada viga no suporte do motor. Em primeiro lugar, protegerá o mancal do motor contra poeira. Em segundo lugar, se por algum motivo um dos parafusos for desaparafusado, ele não cairá durante o vôo e não será perdido.Ao montar a estrutura, não usei um único parafuso do kit, pois todos são indecentemente curtos. Em vez disso, fiquei um pouco mais e com uma cabeça para uma chave de fenda Phillips (há uma preferência pessoal).A câmera não ajustou a largura entre as chapas laterais do quadro. Processou levemente as bordas de sua prancha com um arquivo (era mais provável que moesse aspereza) e ela se levantou sem problemas. Mas as dificuldades não terminaram aí. Gostei muito da qualidade do suporte para a câmera da Diatone, mas a câmera com ela não se encaixava no quadro em altura (cerca de 8 a 10 mm). Primeiro, prendi o suporte no lado externo (superior) da placa através de um amortecedor de neoprene, mas o design acabou não sendo confiável. Mais tarde, surgiu a idéia da fixação mais simples e confiável. Peguei apenas um grampo do suporte de Diatone e coloquei em um pedaço de haste com rosca M3. Para impedir que a câmera se mova para o lado, consertei o grampo com acoplamentos de nylon.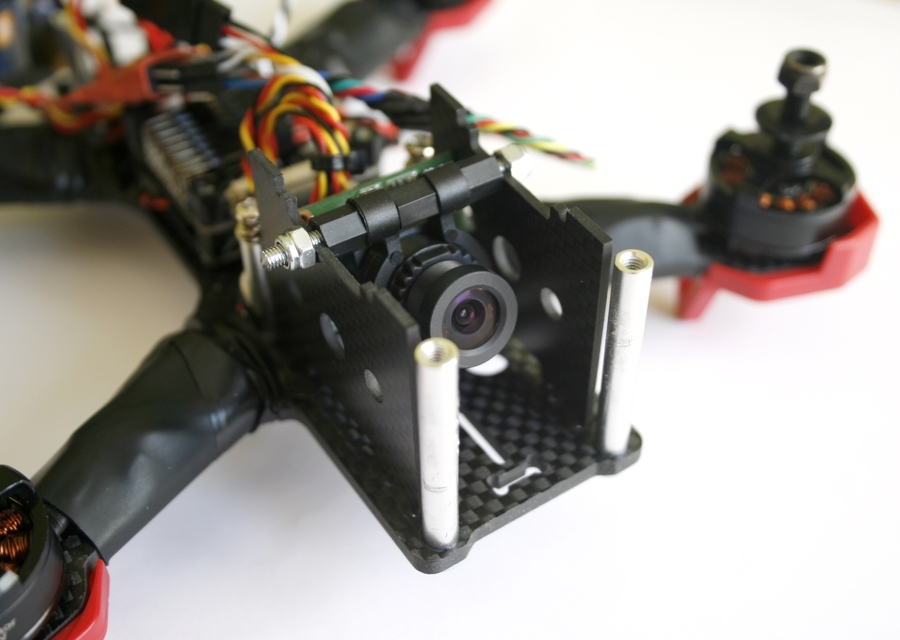 Gostei muito do fato de que apenas os conectores para reguladores precisavam ser soldados a partir dos conectores no PC. Os conectores completos de três pinos não se encaixavam na minha altura, eu tive que seguir o truque e usar os de dois pinos. Nos cinco primeiros canais (4 para reguladores + 1 “para todo bombeiro”), soldei os conectores no painel de sinais e no “terra”, nos outros três - nos “mais” e “terra”, para que o próprio PC possa ser ligado e já a partir dele - luz de fundo. Dado que os clones chineses dos controladores de vôo pecam pela fixação não confiável do conector USB, eu também o soldei. Outra característica pontual do clone SPRacingF3 é o conector do tweeter. Como no caso do vbat, no lado superior da placa há um conector JST-XH de dois pinos e, no lado inferior, é duplicado pelos contatos. O truque éque o clone “terra” no conector é constante e, quando usado, o “tweeter” será sempre ativado. O trabalho normal para o "tweeter" "terra" é exibido apenas no teclado de contato. Isso é facilmente verificado pelo testador: o “mais” do conector chama com um “mais” no teclado de contato e o “menos” - não chama. Portanto, você precisa soldar os fios do "tweeter" na parte inferior do PC.
Gostei muito do fato de que apenas os conectores para reguladores precisavam ser soldados a partir dos conectores no PC. Os conectores completos de três pinos não se encaixavam na minha altura, eu tive que seguir o truque e usar os de dois pinos. Nos cinco primeiros canais (4 para reguladores + 1 “para todo bombeiro”), soldei os conectores no painel de sinais e no “terra”, nos outros três - nos “mais” e “terra”, para que o próprio PC possa ser ligado e já a partir dele - luz de fundo. Dado que os clones chineses dos controladores de vôo pecam pela fixação não confiável do conector USB, eu também o soldei. Outra característica pontual do clone SPRacingF3 é o conector do tweeter. Como no caso do vbat, no lado superior da placa há um conector JST-XH de dois pinos e, no lado inferior, é duplicado pelos contatos. O truque éque o clone “terra” no conector é constante e, quando usado, o “tweeter” será sempre ativado. O trabalho normal para o "tweeter" "terra" é exibido apenas no teclado de contato. Isso é facilmente verificado pelo testador: o “mais” do conector chama com um “mais” no teclado de contato e o “menos” - não chama. Portanto, você precisa soldar os fios do "tweeter" na parte inferior do PC.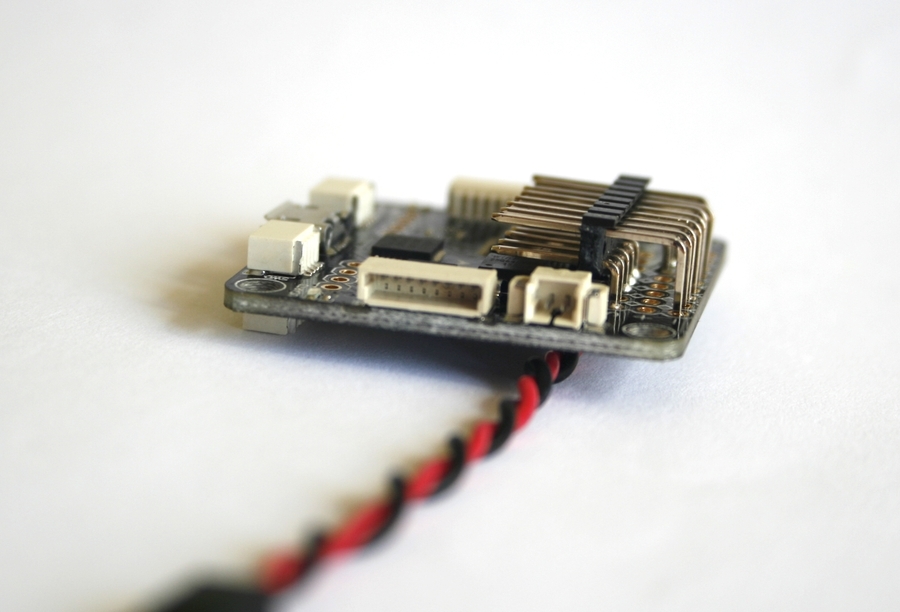 Os conectores de três pinos dos reguladores também tiveram que ser substituídos. Foi possível usar quatro plugues de dois pinos, mas, em vez disso, peguei dois plugues de quatro pinos e inseri todos os controladores em um "terra" e um fio de sinal no segundo (seguindo a ordem de conexão dos motores).
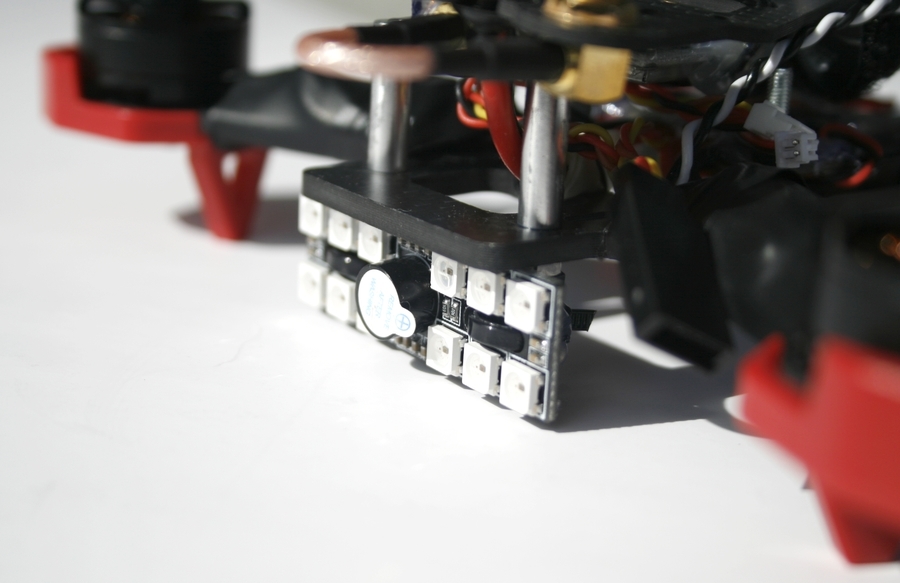
Os conectores de três pinos dos reguladores também tiveram que ser substituídos. Foi possível usar quatro plugues de dois pinos, mas, em vez disso, peguei dois plugues de quatro pinos e inseri todos os controladores em um "terra" e um fio de sinal no segundo (seguindo a ordem de conexão dos motores).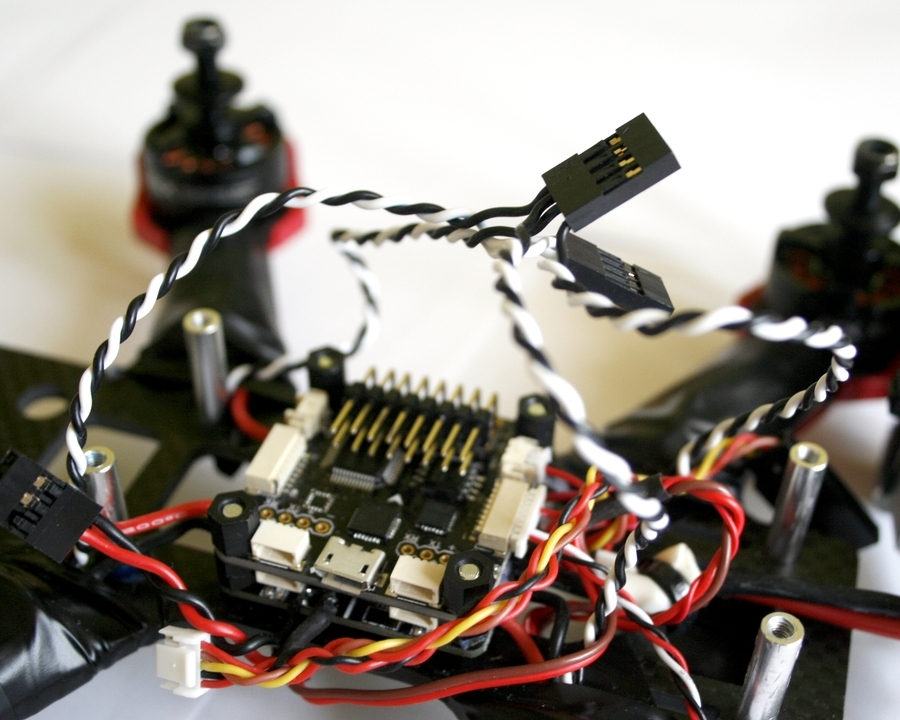 A placa retroiluminada tem uma largura maior que a estrutura e sobressai nas laterais. O único local onde as hélices não o atingirão é embaixo da estrutura. Eu tive que trabalhar em uma fazenda coletiva: peguei parafusos longos, coloquei acoplamentos de nylon com fendas pré-fabricadas (para que os laços que prendessem a luz de fundo pudessem travar) e os parafusei através da placa inferior nas prateleiras da estrutura. Ele puxou o prato com LEDs para as pernas resultantes com laços (os orifícios no prato se encaixam perfeitamente) e encheu os laços com cola quente. Na parte de trás da placa, conectores soldados.Já após a montagem, na fase de configuração, descobriu-se que havia algo errado com o squeaker. Imediatamente após conectar a bateria, ela começou a chiar monotonamente, e se você a ativar a partir do controle remoto, esse chiado monótono foi sobreposto também rítmico. No começo, eu pequei em um PC, mas depois de medir a tensão com um multímetro, ficou claro onde exatamente estava o problema. De fato, desde o início foi possível conectar um LED regular aos fios do tweeter. Como resultado, encomendei vários tweeters de uma só vez, ouvi-os e dei o som mais alto.
A placa retroiluminada tem uma largura maior que a estrutura e sobressai nas laterais. O único local onde as hélices não o atingirão é embaixo da estrutura. Eu tive que trabalhar em uma fazenda coletiva: peguei parafusos longos, coloquei acoplamentos de nylon com fendas pré-fabricadas (para que os laços que prendessem a luz de fundo pudessem travar) e os parafusei através da placa inferior nas prateleiras da estrutura. Ele puxou o prato com LEDs para as pernas resultantes com laços (os orifícios no prato se encaixam perfeitamente) e encheu os laços com cola quente. Na parte de trás da placa, conectores soldados.Já após a montagem, na fase de configuração, descobriu-se que havia algo errado com o squeaker. Imediatamente após conectar a bateria, ela começou a chiar monotonamente, e se você a ativar a partir do controle remoto, esse chiado monótono foi sobreposto também rítmico. No começo, eu pequei em um PC, mas depois de medir a tensão com um multímetro, ficou claro onde exatamente estava o problema. De fato, desde o início foi possível conectar um LED regular aos fios do tweeter. Como resultado, encomendei vários tweeters de uma só vez, ouvi-os e dei o som mais alto.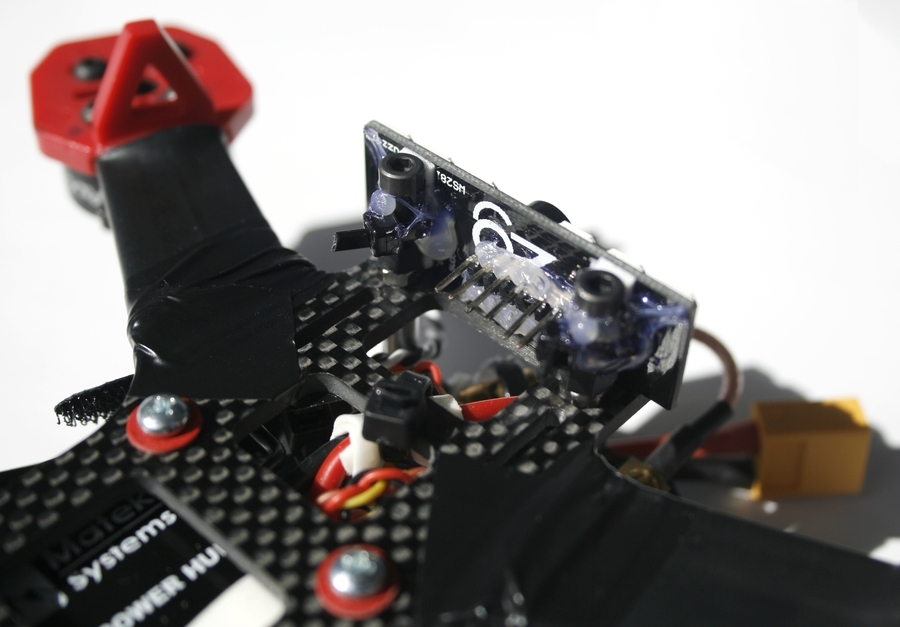
 Muitas vezes, o PDB e o controlador são presos à estrutura com parafusos de nylon, mas não confio na força deles. Então eu usei parafusos de metal de 20 mm e acoplamentos de nylon. Depois de instalar o PDB, eu soldei a energia dos reguladores (os outros fios foram soldados com antecedência) e enchi os pontos de solda com cola quente. Prendi o cabo de alimentação principal que leva a bateria ao quadro para que ele não fosse arrancado em caso de acidente.
Muitas vezes, o PDB e o controlador são presos à estrutura com parafusos de nylon, mas não confio na força deles. Então eu usei parafusos de metal de 20 mm e acoplamentos de nylon. Depois de instalar o PDB, eu soldei a energia dos reguladores (os outros fios foram soldados com antecedência) e enchi os pontos de solda com cola quente. Prendi o cabo de alimentação principal que leva a bateria ao quadro para que ele não fosse arrancado em caso de acidente.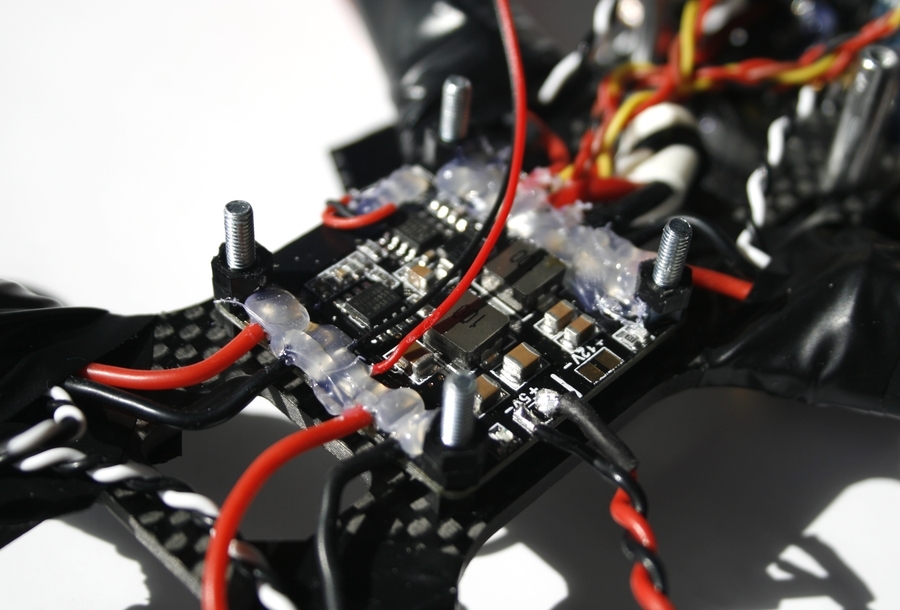 Tirei todos os conectores do receptor com um alicate, exceto os três necessários, e removi o jumper entre o terceiro e o quarto canais diretamente na placa. Como escrevi acima, seria mais sensato pegar um receptor sem conectores. Também implantei antenas nele e derretei em um encolhimento. No quadro, o receptor se encaixa bem entre o PBD e o pilar traseiro. Com esse arranjo, seus indicadores são claramente visíveis e há acesso ao botão de ligação.
Tirei todos os conectores do receptor com um alicate, exceto os três necessários, e removi o jumper entre o terceiro e o quarto canais diretamente na placa. Como escrevi acima, seria mais sensato pegar um receptor sem conectores. Também implantei antenas nele e derretei em um encolhimento. No quadro, o receptor se encaixa bem entre o PBD e o pilar traseiro. Com esse arranjo, seus indicadores são claramente visíveis e há acesso ao botão de ligação.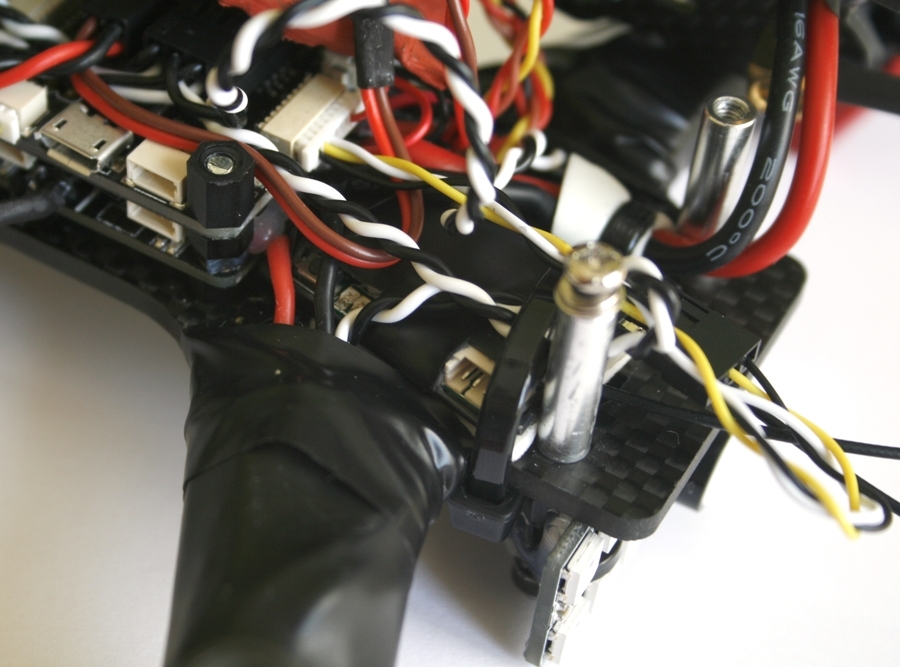 Fixei o transmissor de vídeo com laços e cola quente na placa superior do quadro para que, através do slot, houvesse acesso ao botão de comutação de canal e aos indicadores LED.
Fixei o transmissor de vídeo com laços e cola quente na placa superior do quadro para que, através do slot, houvesse acesso ao botão de comutação de canal e aos indicadores LED. Há um orifício especial no quadro para conectar a antena do transmissor de vídeo. Mas não conecte-o diretamente ao transmissor. Acontece uma espécie de alavanca, onde a antena serve como um ombro, o próprio transmissor com todos os fios como o outro e o ponto de conexão do conector será o ponto de apoio, que terá carga máxima. Assim, no caso de um acidente com quase 100% de probabilidade, o conector na placa do transmissor é interrompido. Portanto, você precisa montar a antena através de algum tipo de adaptador ou cabo de extensão.Para o MinimOSD, eu decidi soldar os conectores, não os fios diretamente. Nos fóruns, eles escrevem que esse quadro geralmente se esgota; portanto, é aconselhável se preparar imediatamente para uma possível substituição. Peguei a barra com conectores em duas filas, soldou as inferiores às almofadas com orifícios e trouxe vIn e vOut às superiores. Depois disso, ele encheu os locais de solda com cola quente e embalou a prancha inteira em retração térmica.
Há um orifício especial no quadro para conectar a antena do transmissor de vídeo. Mas não conecte-o diretamente ao transmissor. Acontece uma espécie de alavanca, onde a antena serve como um ombro, o próprio transmissor com todos os fios como o outro e o ponto de conexão do conector será o ponto de apoio, que terá carga máxima. Assim, no caso de um acidente com quase 100% de probabilidade, o conector na placa do transmissor é interrompido. Portanto, você precisa montar a antena através de algum tipo de adaptador ou cabo de extensão.Para o MinimOSD, eu decidi soldar os conectores, não os fios diretamente. Nos fóruns, eles escrevem que esse quadro geralmente se esgota; portanto, é aconselhável se preparar imediatamente para uma possível substituição. Peguei a barra com conectores em duas filas, soldou as inferiores às almofadas com orifícios e trouxe vIn e vOut às superiores. Depois disso, ele encheu os locais de solda com cola quente e embalou a prancha inteira em retração térmica. O toque final é o adesivo do número de telefone. Isso dará pelo menos um pouco de esperança no caso de uma perda de quadrocóptero.
O toque final é o adesivo do número de telefone. Isso dará pelo menos um pouco de esperança no caso de uma perda de quadrocóptero. A assembléia sobre isso chegou ao fim. O resultado foi compacto e, ao mesmo tempo, o acesso a todos os órgãos necessários foi preservado. Mais fotos podem ser vistas aqui.. A massa do quadrocoprera sem bateria é 330g, com bateria - 470g. E isso é sem uma câmera de ação e monta para ela. No próximo artigo, falarei sobre firmware e ajuste do quadrocopter resultante.
A assembléia sobre isso chegou ao fim. O resultado foi compacto e, ao mesmo tempo, o acesso a todos os órgãos necessários foi preservado. Mais fotos podem ser vistas aqui.. A massa do quadrocoprera sem bateria é 330g, com bateria - 470g. E isso é sem uma câmera de ação e monta para ela. No próximo artigo, falarei sobre firmware e ajuste do quadrocopter resultante. Source: https://habr.com/ru/post/pt395455/
All Articles