“A origem do projeto. Parte 1.1. Como eu montei um robô de telepresença em uma distância entre eixos. ” Tecnologia de resistência
Projeto: Robôs de resistência e tecnologias de laser.Artigo nº 1. “A origem do projeto. Parte 1.1. Como eu montei um robô de telepresença em uma distância entre eixos. ”Até 2015, os membros de nossa futura equipe conseguiram ganhar dinheiro suficiente para arriscar seu tempo a longo prazo (eles determinaram um horizonte de planejamento de 1 ano). E decidimos organizar uma startup. Envolver-se em vendas? Não, startup de tecnologia! Ou seja, o desenvolvimento de robôs e lasers de estado sólido com uma potência da ordem de 1 a 10 watts.Eu imediatamente gostei da idéia de estar no momento certo em um lugar interessante por milhares de quilômetros e ainda assim gostar! Todos nós amamos a transmissão ao vivo. E graças ao robô, também controlo a direção do meu olhar, do meu paradeiro. Portanto, em 2015, quando iniciamos o projeto Endurance Robots, comecei a desenvolver um robô de telepresença sobre rodas. A distância entre eixos permitirá que você se desloque pela sala ou na rua, e a telepresença garantirá a relevância do que está acontecendo em torno da situação. O objetivo final: realidade virtual completa, um robô controlado por uma pessoa com a ajuda dos óculos Oculus rift! Fogo!))Para começar, pesquisei no Google e estudei as ofertas disponíveis no mercado internacional: PadBot (China), BotEyes (Rússia), Double Robotics (EUA), Webot (Rússia), OrigiBot (EUA), Oculus (Canadá), Anybot (EUA), RBOT Synergy (Rússia), e compilou uma tabela de características comparativas dos robôs. Os robôs diferiam em sua funcionalidade: a capacidade de levar objetos com um manipulador (uma lata de cerveja da geladeira :), superar altos obstáculos, carregar de forma autônoma etc. etc. Naturalmente, o preço flutuava e variava de US $ 1.000 a US $ 10.000. Posteriormente, percebi que dispositivos de baixo custo até US $ 5.000 são plataformas robóticas controladas por um operador humano, mas não robôs autônomos, capazes de tomar decisões independentemente em um ambiente em mudança: abordar um obstáculo, percorrer uma rota do ponto A ao ponto B, reconhecimento de comandos de fala.Nossa equipe de robôs de resistência decidiu entrar no mercado de plataformas de classe econômica até US $ 2000. Com base na tabela de características comparativas, determinei as características do dispositivo que precisam ser alcançadas em primeiro lugar, a saber: duração da bateria (de 8 horas, um dia útil inteiro), superação de obstáculos (até 3,5 cm de altura, porta da frente), transmissão confiável controle comandos via Internet, comunicações de áudio e vídeo de alta qualidade. Um participante do projeto insistiu em criar um corpo de robô a partir de um manequim feminino e instalar um tablet entre os seios. Até compramos um torso usado sem braços, pernas e cabeça por US $ 2 (um novo manequim completo custa ~ US $ 100), mas devido a um orçamento limitado, essa ideia acabou por morrer.o que precisa ser alcançado em primeiro lugar, a saber: duração da bateria (de 8 horas, um dia inteiro de trabalho), superação de obstáculos (até 3,5 cm de altura, porta da porta da frente), transmissão confiável de comandos de controle via Internet, vídeo e vídeo de alta qualidade comunicação de áudio. Um participante do projeto insistiu em criar um corpo de robô a partir de um manequim feminino e instalar um tablet entre os seios. Até compramos um torso usado sem braços, pernas e cabeça por US $ 2 (um novo manequim completo custa ~ US $ 100), mas devido a um orçamento limitado, essa ideia acabou por morrer.o que precisa ser alcançado em primeiro lugar, a saber: duração da bateria (de 8 horas, um dia inteiro de trabalho), superação de obstáculos (até 3,5 cm de altura, porta da porta da frente), transmissão confiável de comandos de controle via Internet, vídeo de alta qualidade e comunicação de áudio. Um participante do projeto insistiu em criar um corpo de robô a partir de um manequim feminino e instalar um tablet entre os seios. Até compramos um torso usado sem braços, pernas e cabeça por US $ 2 (um novo manequim completo custa ~ US $ 100), mas devido a um orçamento limitado, essa ideia acabou por morrer.Um participante do projeto insistiu em criar um corpo de robô a partir de um manequim feminino e instalar um tablet entre os seios. Até compramos um torso usado sem braços, pernas e cabeça por US $ 2 (um novo manequim completo custa ~ US $ 100), mas devido a um orçamento limitado, essa ideia acabou por morrer.Um participante do projeto insistiu em criar um corpo de robô a partir de um manequim feminino e instalar um tablet entre os seios. Até compramos um torso usado sem braços, pernas e cabeça por US $ 2 (um novo manequim completo custa ~ US $ 100), mas devido a um orçamento limitado, essa ideia acabou por morrer. No decorrer dos testes de demanda, ficou claro que as pessoas estão procurando não apenas um tablet sobre rodas, mas uma plataforma robótica que pode executar tarefas intelectuais humanas: reconhecer objetos e fala (tecnologia OpenCV de código aberto), responder corretamente a perguntas (IA), para superar a rota para o assunto, capture o assunto e transfira para o destino. Ou seja, a distância entre eixos não é a principal, mas uma adição necessária ao que oferecemos. Estrategicamente, a distância entre eixos permanece o principal fator de forma. Por analogia, um laptop -> tablet. I.e. um novo formulário é um novo produto.
No decorrer dos testes de demanda, ficou claro que as pessoas estão procurando não apenas um tablet sobre rodas, mas uma plataforma robótica que pode executar tarefas intelectuais humanas: reconhecer objetos e fala (tecnologia OpenCV de código aberto), responder corretamente a perguntas (IA), para superar a rota para o assunto, capture o assunto e transfira para o destino. Ou seja, a distância entre eixos não é a principal, mas uma adição necessária ao que oferecemos. Estrategicamente, a distância entre eixos permanece o principal fator de forma. Por analogia, um laptop -> tablet. I.e. um novo formulário é um novo produto. A tarefa no primeiro estágio é desenvolver uma distância entre eixos: barata (não mais que US $ 200 para produção em pequena escala), eficiente (que se moveria com segurança, possui modularidade e capacidade de reparar rapidamente), simples (semelhante ao que o telefone instalou, o aplicativo baixou e o sistema funciona) ), confiável (software, hardware), que no futuro poderá ser aprimorado. O operador deve poder enviar sinais para motores e servos elétricos através da Internet.Portanto, PRINCÍPIOS BÁSICOS de um design.- A versatilidade da plataforma a la "veículo todo-o-terreno" não é buscada. Modelo ambiental = interior. A superfície é plana (laminado, azulejo, madeira, concreto, linóleo), obstáculos de até 1 cm.- Prioridade na seguinte sequência: atratividade, ergonomia e simplicidade, mobilidade.- Criação de um protótipo modelado para produção industrial.- Confiabilidade na operação diária (1 ano)- Substituibilidade ou complementaridade (coloque um segundo alto-falante ou uma segunda câmera).- A versatilidade dos elementos de fixação.- Movimento retilíneo, não ziguezagues.- Ruído e vibração inferiores a 10 decibéis.- Dobrabilidade e facilidade de construção para transferência de um edifício para outro.
A tarefa no primeiro estágio é desenvolver uma distância entre eixos: barata (não mais que US $ 200 para produção em pequena escala), eficiente (que se moveria com segurança, possui modularidade e capacidade de reparar rapidamente), simples (semelhante ao que o telefone instalou, o aplicativo baixou e o sistema funciona) ), confiável (software, hardware), que no futuro poderá ser aprimorado. O operador deve poder enviar sinais para motores e servos elétricos através da Internet.Portanto, PRINCÍPIOS BÁSICOS de um design.- A versatilidade da plataforma a la "veículo todo-o-terreno" não é buscada. Modelo ambiental = interior. A superfície é plana (laminado, azulejo, madeira, concreto, linóleo), obstáculos de até 1 cm.- Prioridade na seguinte sequência: atratividade, ergonomia e simplicidade, mobilidade.- Criação de um protótipo modelado para produção industrial.- Confiabilidade na operação diária (1 ano)- Substituibilidade ou complementaridade (coloque um segundo alto-falante ou uma segunda câmera).- A versatilidade dos elementos de fixação.- Movimento retilíneo, não ziguezagues.- Ruído e vibração inferiores a 10 decibéis.- Dobrabilidade e facilidade de construção para transferência de um edifício para outro. CARACTERÍSTICAS TÉCNICAS de um projeto.- Velocidade máxima de até 3 km / h.- A altura da borda superior da tela é de ~ 1,5 m (de preferência com a possibilidade de mudar de 1,2 ma 1,8 m).- Quantos kg têm uma altura de 180 cm? Tablet + berço + dois servos. O design do triciclo será estável com as baterias selecionadas ao longo dos lados ao atingir um obstáculo de 3,5 cm com uma ou duas rodas?E então um milhão de perguntas caiu ... Qual o tamanho das rodas? Que material?
CARACTERÍSTICAS TÉCNICAS de um projeto.- Velocidade máxima de até 3 km / h.- A altura da borda superior da tela é de ~ 1,5 m (de preferência com a possibilidade de mudar de 1,2 ma 1,8 m).- Quantos kg têm uma altura de 180 cm? Tablet + berço + dois servos. O design do triciclo será estável com as baterias selecionadas ao longo dos lados ao atingir um obstáculo de 3,5 cm com uma ou duas rodas?E então um milhão de perguntas caiu ... Qual o tamanho das rodas? Que material? Que tipo: omni, suave, com um piso profundo?
Que tipo: omni, suave, com um piso profundo? Quantas rodas: três ou quatro? Como plantar no eixo?
Quantas rodas: três ou quatro? Como plantar no eixo? Para a caixa de velocidades ou eixo do motor?
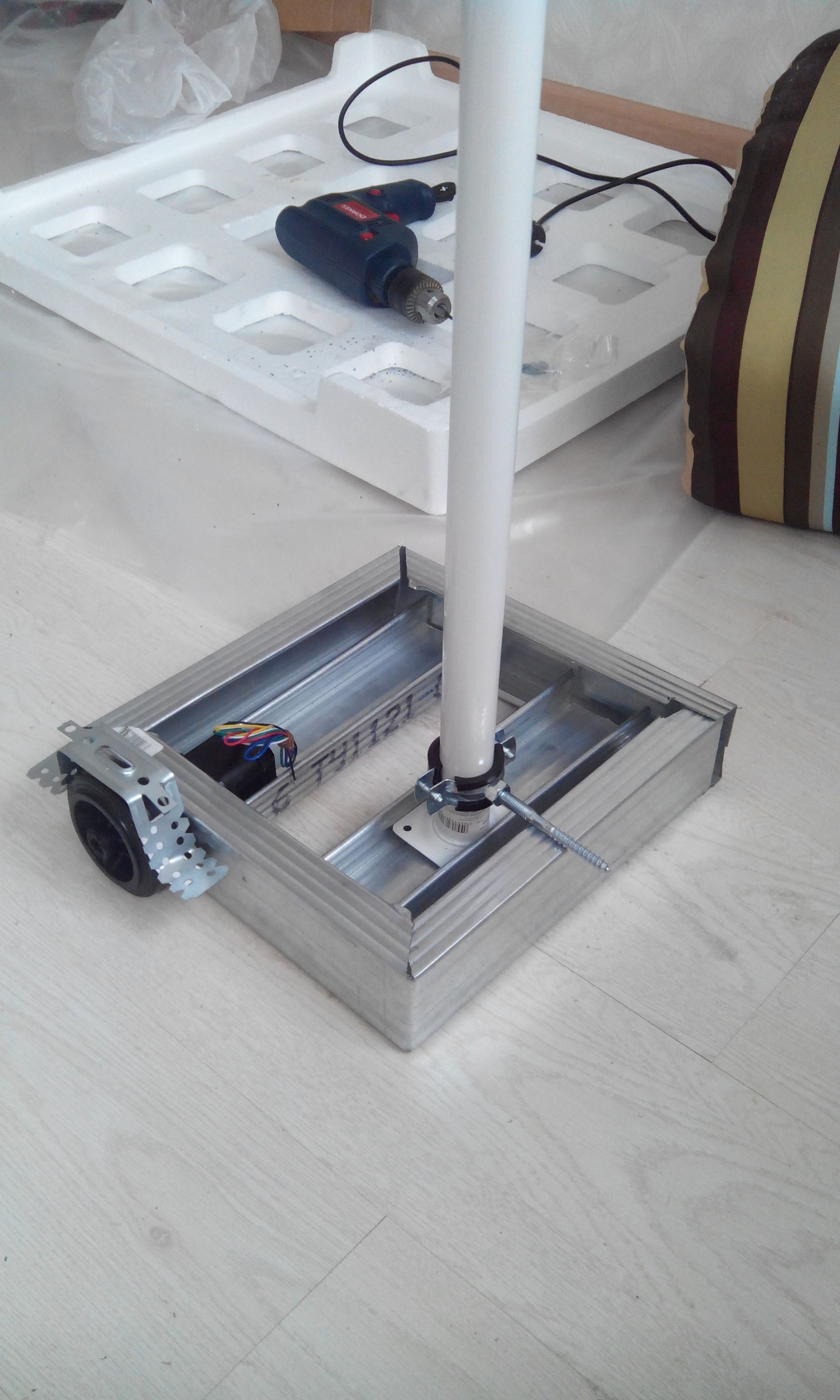
Para a caixa de velocidades ou eixo do motor? Qual motor escolher: coletor, sem escovas, degrau? De que material fazer a moldura? Como resultado, criei o primeiro protótipo de materiais prontamente disponíveis em qualquer loja de ferragens: 3 rodas (duas dianteiras e uma giratória), uma estrutura feita de perfil em alumínio fino em forma de U, parafusos e cavilhas autorroscantes, 2 motores de passo.
Qual motor escolher: coletor, sem escovas, degrau? De que material fazer a moldura? Como resultado, criei o primeiro protótipo de materiais prontamente disponíveis em qualquer loja de ferragens: 3 rodas (duas dianteiras e uma giratória), uma estrutura feita de perfil em alumínio fino em forma de U, parafusos e cavilhas autorroscantes, 2 motores de passo.
 O principal é que esse protótipo cumpriu sua missão: servir nosso circuito Andrei para testar eletrônicos de alto a baixo.Neste artigo, descrevi o início de nossa longa jornada. Produtos amadores e fotografias. Mas nas partes a seguir mostrarei uma abordagem mais profissional:O layout dos elementos da mecânica e da eletrônica, nos quais focamos:
O principal é que esse protótipo cumpriu sua missão: servir nosso circuito Andrei para testar eletrônicos de alto a baixo.Neste artigo, descrevi o início de nossa longa jornada. Produtos amadores e fotografias. Mas nas partes a seguir mostrarei uma abordagem mais profissional:O layout dos elementos da mecânica e da eletrônica, nos quais focamos: Continuação do artigo aqui: “Continuação. Parte 1.2 Como eu montei um robô de telepresença em uma distância entre eixos. ” Robôs de resistência e lasers
Continuação do artigo aqui: “Continuação. Parte 1.2 Como eu montei um robô de telepresença em uma distância entre eixos. ” Robôs de resistência e lasers Source: https://habr.com/ru/post/pt395507/
All Articles