5 sensores de piloto automático e suas dificuldades insolúveis (até agora)
 A primeira parte da revisão dos problemas do piloto automático correu bem e o tempo para seguir em frente. A vida não pára e o Tesla ainda está lutando (Tesla Model X também, mas até agora sem a ajuda de um piloto automático). O que há de errado com os sensores ADAS? E por que nos próximos anos nada mudará dramaticamente?Muitos, surpreendentemente, abordaram suas habilidades físicas. Isso pode ser dito com confiança, porque os sistemas listados abaixo são usados não apenas em carros e possuem grandes mercados fora do mundo automobilístico. Isso é muito dinheiro, bilhões de dólares em P&D e progresso bastante lento.Agora com mais detalhes.Tipos de sensores - como dedos em uma mão, cinco:
A primeira parte da revisão dos problemas do piloto automático correu bem e o tempo para seguir em frente. A vida não pára e o Tesla ainda está lutando (Tesla Model X também, mas até agora sem a ajuda de um piloto automático). O que há de errado com os sensores ADAS? E por que nos próximos anos nada mudará dramaticamente?Muitos, surpreendentemente, abordaram suas habilidades físicas. Isso pode ser dito com confiança, porque os sistemas listados abaixo são usados não apenas em carros e possuem grandes mercados fora do mundo automobilístico. Isso é muito dinheiro, bilhões de dólares em P&D e progresso bastante lento.Agora com mais detalhes.Tipos de sensores - como dedos em uma mão, cinco:- câmeras
- radares
- lidares
- ultrassom
- câmeras infravermelhas.
A classificação é escolhida por conveniência e não pela observância da verdade tecnológica. Em geral, você pode compartilhar de diferentes maneiras:- passivo (câmeras) e ativo (lidar radares),
- no alcance visível (câmeras) e não (todos os outros, incluindo infravermelho),
- por frequências (do ultra-som aos lidares).
Todos esses sensores são de natureza muito diferente e fornecem várias informações ao cérebro eletrônico.O que é importante saber sobre o mercado como um todo?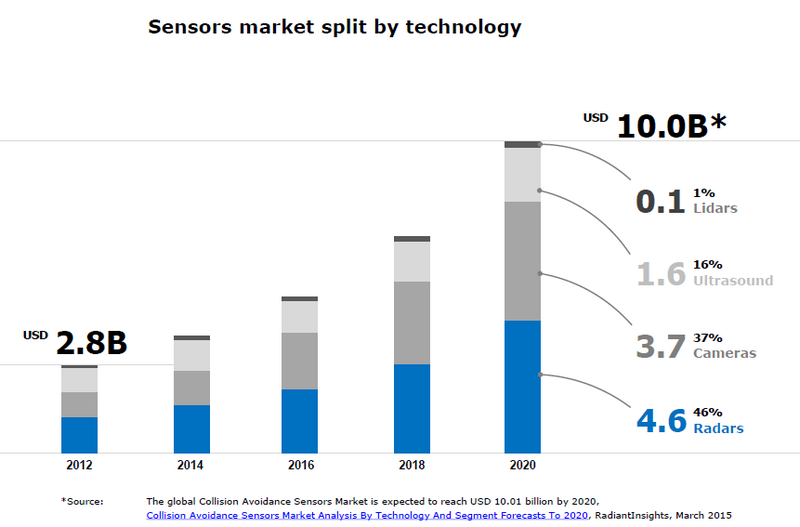 As estimativas variam, mas a ordem é a mesma. O saldo é distorcido em favor de câmeras e radares, que para dois ocupam 85% do mercado monetário. Os lidares continuam sendo uma solução de nicho (somente se as descobertas não acontecerem), e os sensores de ultrassom não podem ir além de seu nicho e as inovações, novamente, não são visíveis. Os sistemas de visão noturna são perdidos mesmo no contexto dos lidares.Agora com mais detalhes.
As estimativas variam, mas a ordem é a mesma. O saldo é distorcido em favor de câmeras e radares, que para dois ocupam 85% do mercado monetário. Os lidares continuam sendo uma solução de nicho (somente se as descobertas não acontecerem), e os sensores de ultrassom não podem ir além de seu nicho e as inovações, novamente, não são visíveis. Os sistemas de visão noturna são perdidos mesmo no contexto dos lidares.Agora com mais detalhes.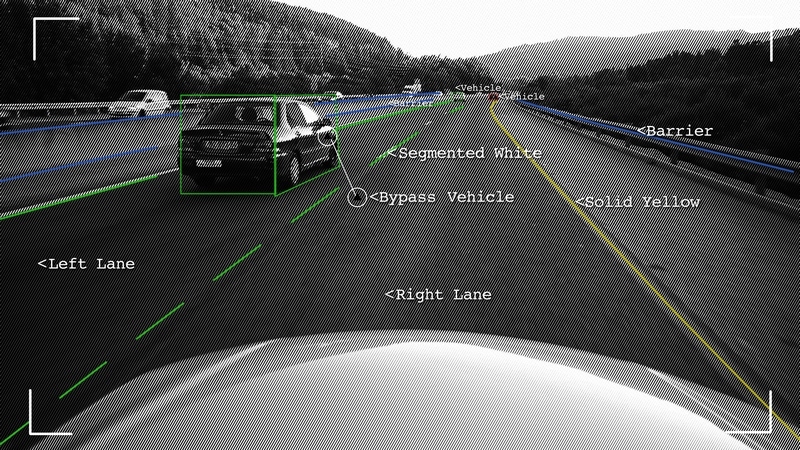
CÂMARAS
Funciona assim: recebeu uma imagem do mundo na faixa visível, processada (quadros e sequência individuais), reconhecida.Prós:- Somente as câmeras podem reconhecer marcas e sinais de estrada.
- As câmeras têm uma boa resolução em ângulo, ou seja, a câmera "entende" objetos que se movem pelo carro (pedestres atravessando a rua).
- De acordo com a imagem da câmera, é possível uma classificação direta dos objetos (“cachorro” - “criança” - “adulto” - “bicicleta” - “carro” - “caminhão”).
- E, é claro, as câmeras são acessíveis - de algumas centenas de dólares ao comprador.
Contras:- As câmeras têm baixa resolução no alcance, dificilmente entendem a distância do obstáculo ou a velocidade de aproximação (as câmeras estéreo resolvem parcialmente o problema).
- Não há medição direta da velocidade dos objetos, ela pode ser entendida por uma série de quadros, e ainda assim a medição é imprecisa.
- Fortemente influenciado pelo clima e pelas condições da estrada - a notória "van branca contra um céu claro" em um acidente recente.
- O processamento de dados das câmeras leva tempo: quanto maior o atraso, mais complexo o sistema de câmeras.
O mercado está lotado de elefantes da Intel e NVIDIA para Mobileye e Magna International. Existem muitas startups, o limite de entrada é baixo. O desenvolvimento da tecnologia se baseia na velocidade e qualidade do processamento de dados, ou seja, em processadores e algoritmos. Não é possível aumentar drasticamente a velocidade de processamento, e os algoritmos inovadores ainda não resolveram nada.Conclusão:
Você ainda não pode ficar sem as câmeras no carro.
RADARES
Funciona assim: emitido em frequência ultra-alta, ouviu o que estava de volta, reconheceu imediatamente a distância dos obstáculos, sua velocidade e ângulos sobre eles.Prós:- As condições climáticas afetam muito menos a operação do radar; a cor dos objetos e a luz não são afetadas.
- Boa resolução na faixa e velocidade, medição direta da faixa e velocidade com boa precisão está disponível.
- Processamento de dados instantâneo (1 / 20–1 / 50 segundos), o que é especialmente importante para altas velocidades.
- A capacidade de facilmente acumular e analisar informações em dinâmica devido à pequena quantidade de informações. Pela mesma razão, adequado para V2I / V2V
Contras:- Não é mais barato e geralmente mais caro que as câmeras. Mais caro que US $ 1.000 para radar de longo alcance.
- Baixa resolução do ângulo (é difícil para o radar entender o movimento).
- Não há oportunidade direta de classificar um obstáculo ou avaliar suas dimensões.
- Forte dependência de alcance no ângulo de visão. Se brilharmos feixe distante e estreito, não vemos interferência na estrada e nas laterais. Brilhamos largamente - temos um pequeno intervalo.
Existem elefantes no mercado, com apenas outros nomes - Bosch Global, Delphi, Smartmicro. Quase não há startups, o limiar de entrada é muito alto devido ao alto custo de equipamentos para o desenvolvimento de microondas. Os métodos de processamento mudaram pouco nos últimos 50 anos; os investimentos no desenvolvimento e organização da produção de componentes (como caminho de alimentação de antena) são medidos em centenas de milhões de euros. Transceptores acessíveis e de alta qualidade, sem os quais não há solução em massa, produzem cinco empresas em todo o mundo. Os radares estão melhorando continuamente, mas o desenvolvimento leva décadas.Conclusão:
Os pontos fortes do radar são os pontos fracos da câmera e vice-versa. Sem radares, também, não pode fazer.Não fui eu quem inventou, mas o Sr. Musk:“... Dito isto, acho que você não precisa do LIDAR. Eu acho que você pode fazer isso tudo com óptica passiva e depois com talvez um RADAR para a frente ... se você estiver dirigindo rápido na chuva, neve ou poeira. Eu acho que resolve completamente isso sem o uso do LIDAR. Não sou muito fã do LIDAR, acho que não faz sentido nesse contexto. ”

LIDARES
Telêmetros a laser: brilhavam com um laser, olhavam o que estava de volta, emitiam uma série de pontos com distâncias.Prós:- Wunderwaffle, vê tudo ao redor em detalhes e com alta precisão. Exceto por eles, ninguém pode e nunca será.
Contras:- Os lidares de digitalização veem o mesmo trecho de estrada apenas duas a três vezes por segundo.
- Alto custo, não - CUSTO de lidar.
- Ainda os lidares são frágeis.
- Em suma, o resto são os contras
Existem jogadores legais no mercado - Velodyne LiDAR, Quanergy, Sick. Todas as decisões são relativamente jovens, algumas startups, mas relativamente grandes. Os grandes players da Bosch, com dezenas de bilhões de receita no setor automotivo, não estão mais no mercado e nunca estarão. Com uma redução no custo do lidar e o abandono de peças móveis, os recursos e a necessidade do lidar também caem catastroficamente. Todo mundo está esperando uma decisão por 250 dólares, mas algo está faltando.Simples e compreensível: o mercado de automóveis para os lidares é cem vezes menor que o mercado de radares ou câmeras, e eles estão cheios de outras aplicaçõesConclusão:
Até a revolução acontecer, os lidares continuarão sendo uma solução de nicho. Bom para prototipagem, não há como um carro de produção. Sim, e para a criação de protótipos é ruim: a lógica afiada para os lidares não se adapta bem a outros sensores. ULTRASOUNDSensores de estacionamento conhecidos: emitiam um sinal de alta frequência, esperavam até que retornasse, calculavam o tempo.Prós:
ULTRASOUNDSensores de estacionamento conhecidos: emitiam um sinal de alta frequência, esperavam até que retornasse, calculavam o tempo.Prós:- Muito barato, cem ou dois dólares para um sistema multi-sensor
- Os sensores são fáceis de integrar.
- A tecnologia é bem estabelecida e compreensível, você pode até experimentar em casa no arduino.
Contras:- O alcance é limitado a unidades de metros.
- Não há como entender o ângulo do objeto ou medir diretamente a velocidade.
- Baixa confiabilidade de dados.
Agora, o mercado é dominado pelo noname chinês, a clareira já foi pisoteada, há poucos que querem investir em novos projetos. Existem poucas startups, mas há, por exemplo , Toposens , que faz uma coisa bacana no ultrassom, mas algo de repente começa a fazer um radar também.Conclusão:
Assim que os radares e os lidares aprendem bem a curtas distâncias, o ultrassom permanecerá apenas para o arduino. Uma piada :). CÂMARAS INFRAVERMELHOSComo funciona: olhou na faixa de infravermelho, analisou imagens na matriz.Prós:
CÂMARAS INFRAVERMELHOSComo funciona: olhou na faixa de infravermelho, analisou imagens na matriz.Prós:- Pessoas gostosas e animais da floresta são claramente visíveis.
Contras:- Caro, alguns milhares de dólares apenas para a câmera frontal
- Escopo estreito
- Limitações nas temperaturas de uso.
Conclusão:
Uma história de nicho uniforme do que lidares. Radares com lidares os expulsarão do mercado de carros muito em breve, se não já.E agora - doce. Para resumir:- Nenhum sensor ou sistema de sensores pode se tornar universal. Se falarmos sobre o papel do único em soluções low-end - estas são câmeras. Em segundo lugar, radares.
- Qualquer sistema ADAS e especialmente um piloto automático usará um sistema de vários sensores. Isso é chamado de fusão de sensores e combina principalmente câmeras e radares. Eu suspeito que eles vão terminar.
- Quanto mais informações heterogêneas você deseja coletar, mais caras elas custam (metade do problema) e mais tempo leva. Quanto mais processamos, mais devagar precisamos dirigir para estarmos seguros. Daí o passeio de tartaruga da maioria dos pilotos automáticos e o amor pelo bom tempo.
E isso não é tudo. Agora vamos falar sobre os problemas do mundo real .Source: https://habr.com/ru/post/pt396185/
All Articles