O robô VI rasteja, mexe e nada com apenas um motor
 Se você precisar de movimento, o dispositivo pode recorrer a rodas e trilhos, caminhar ou entrar no nível exótico de engatinhar e nadar. Existem muitas maneiras de fazer o robô se mover. Às vezes pode até parecer que nada de novo possa ser inventado. Mas isso está longe de ser o caso. Em um artigo publicado recentemente, David Zarruk, da Universidade Ben-Gurion, no Negev, descreve um robô sem-fim de onda que é acionado por apenas um atuador.O robô é chamado: robô tipo onda de atuador único ou SAW. Sua estrutura ondulatória o empurra para frente ou para trás. Para voltas, você precisa de volantes. Esse projeto não apenas se move bem em terra, mas também pode subir em fendas estreitas e nadar na água.Pesquisadores dizem que os princípios de rastreamento são emprestados de cobras. Embora o curso do robô SAW possa ser comparado com os métodos de movimentação do worm, a analogia é arbitrária. O corpo de uma minhoca é alongado em uma parte devido ao afinamento. O front end avança, seguido pelo verso, que contrai. O processo é repetido. SAW é um sinusóide na superfície. Os princípios do movimento do robô são semelhantes aos usados por alguns pequenos animais marinhos em uma escala muito menor: organismos microscópicos flutuam com a ajuda de um flagelo.Demonstração em vídeo do robô.Minimalismo, facilidade de movimento e alto desempenho - é nisso que Zarruk trabalha há muito tempo. Em entrevista à revista IEEE Spectrum, Zarruk disse que em 2004, quando estudante, ele tentou recriar um movimento de onda semelhante ao que ocorre nos organismos vivos. Enquanto trabalhava no doutorado, Zarruk teve a idéia de usar o movimento das ondas para sistemas dentro do sistema digestivo. Um sistema simples com um motor pode ser reduzido e usado para se mover dentro do intestino.Há alguns anos, Zarruk ministrou um curso de design de produto e falou sobre molas. Então ele percebeu que em uma projeção a primavera é um círculo, na outra um sinusóide. Se a mola girar, a onda se moverá sem complicações. A simplicidade dos princípios do movimento interessou ao pesquisador. Imagem superior: o motor gira uma espiral em relação à carcaça. Figura inferior: 25 elos circundam a espiral, são presos ao corpo e não giram.
A SAW possui um mecanismo. Ele gira a espinha do robô - uma espiral rígida. O último é cercado por uma série de links impressos em uma impressora 3D. Esses elos são móveis em um plano, como partes de uma corrente de bicicleta. A espiral gira e os links sobem e descem. Ao mesmo tempo, os elos se movem de maneira que, em contato com a superfície, empurram o robô para frente.
Se você precisar de movimento, o dispositivo pode recorrer a rodas e trilhos, caminhar ou entrar no nível exótico de engatinhar e nadar. Existem muitas maneiras de fazer o robô se mover. Às vezes pode até parecer que nada de novo possa ser inventado. Mas isso está longe de ser o caso. Em um artigo publicado recentemente, David Zarruk, da Universidade Ben-Gurion, no Negev, descreve um robô sem-fim de onda que é acionado por apenas um atuador.O robô é chamado: robô tipo onda de atuador único ou SAW. Sua estrutura ondulatória o empurra para frente ou para trás. Para voltas, você precisa de volantes. Esse projeto não apenas se move bem em terra, mas também pode subir em fendas estreitas e nadar na água.Pesquisadores dizem que os princípios de rastreamento são emprestados de cobras. Embora o curso do robô SAW possa ser comparado com os métodos de movimentação do worm, a analogia é arbitrária. O corpo de uma minhoca é alongado em uma parte devido ao afinamento. O front end avança, seguido pelo verso, que contrai. O processo é repetido. SAW é um sinusóide na superfície. Os princípios do movimento do robô são semelhantes aos usados por alguns pequenos animais marinhos em uma escala muito menor: organismos microscópicos flutuam com a ajuda de um flagelo.Demonstração em vídeo do robô.Minimalismo, facilidade de movimento e alto desempenho - é nisso que Zarruk trabalha há muito tempo. Em entrevista à revista IEEE Spectrum, Zarruk disse que em 2004, quando estudante, ele tentou recriar um movimento de onda semelhante ao que ocorre nos organismos vivos. Enquanto trabalhava no doutorado, Zarruk teve a idéia de usar o movimento das ondas para sistemas dentro do sistema digestivo. Um sistema simples com um motor pode ser reduzido e usado para se mover dentro do intestino.Há alguns anos, Zarruk ministrou um curso de design de produto e falou sobre molas. Então ele percebeu que em uma projeção a primavera é um círculo, na outra um sinusóide. Se a mola girar, a onda se moverá sem complicações. A simplicidade dos princípios do movimento interessou ao pesquisador. Imagem superior: o motor gira uma espiral em relação à carcaça. Figura inferior: 25 elos circundam a espiral, são presos ao corpo e não giram.
A SAW possui um mecanismo. Ele gira a espinha do robô - uma espiral rígida. O último é cercado por uma série de links impressos em uma impressora 3D. Esses elos são móveis em um plano, como partes de uma corrente de bicicleta. A espiral gira e os links sobem e descem. Ao mesmo tempo, os elos se movem de maneira que, em contato com a superfície, empurram o robô para frente.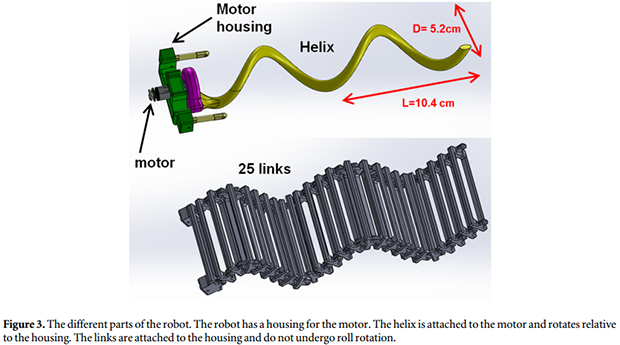
 A onda vai da direita para a esquerda e os links em contato com a Terra se movem levemente para a esquerda e giram no sentido horário.O robô SAW só pode avançar ou retroceder. Para reverter, basta torcer a espiral na direção oposta. Duas rodas no estojo o ajudam a dirigir, que são de outra forma passivas: elas não energizam o dispositivo. Pode parecer que a única maneira de acelerar o movimento é girar a espiral mais rapidamente. Mas os pesquisadores acrescentaram dentes aos links que permitem fazer movimentos de sete ondas em seis ciclos. Então a velocidade aumentou 13%. Dentes especiais não interferem com os elos que se movem um em relação ao outro.
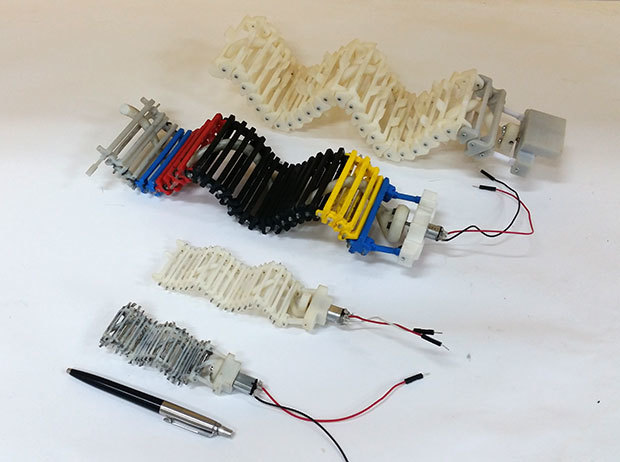
A onda vai da direita para a esquerda e os links em contato com a Terra se movem levemente para a esquerda e giram no sentido horário.O robô SAW só pode avançar ou retroceder. Para reverter, basta torcer a espiral na direção oposta. Duas rodas no estojo o ajudam a dirigir, que são de outra forma passivas: elas não energizam o dispositivo. Pode parecer que a única maneira de acelerar o movimento é girar a espiral mais rapidamente. Mas os pesquisadores acrescentaram dentes aos links que permitem fazer movimentos de sete ondas em seis ciclos. Então a velocidade aumentou 13%. Dentes especiais não interferem com os elos que se movem um em relação ao outro. Foram feitos vários modelos de tamanhos diferentes. O maior (multicolorido) tem uma velocidade de 5,6 ondas por segundo ou 57 centímetros por segundo. Pode subir entre duas superfícies estreitamente ajustadas a uma velocidade de 8 cm / s. Fechado em uma caixa estanque, o modelo flutua a uma velocidade de 6 cm / s. A serra não funciona apenas no piso plano do laboratório, supera o terreno e passa pedras e grama. SAW não é apenas um brinquedo. Agora foi reduzido para o tamanho de uma caneta (a amostra mais baixa na foto acima). No futuro, o robô poderá ser miniaturizado a tal ponto que poderá remover o intestino humano e coletar amostras para biópsia. O trabalho para redução adicional já está em andamento.Segundo Zarruk, o robô quase não requer manutenção, o que é incomum para a estrutura dinâmica obtida pela impressão 3D. No futuro, o sistema de taxiamento será alterado - o atual não é muito elegante. Os pesquisadores querem tentar juntar dois robôs SAW através de uma dobradiça. E, se acontecer de mudar rapidamente a frequência das ondas e sua amplitude, o robô poderá se adaptar melhor a diferentes superfícies, contorcer tubos de vários diâmetros e otimizar o movimento de cada um dos fluidos.Robô tipo onda de atuador único (SAW): projeto, modelagem e experimentos
Foram feitos vários modelos de tamanhos diferentes. O maior (multicolorido) tem uma velocidade de 5,6 ondas por segundo ou 57 centímetros por segundo. Pode subir entre duas superfícies estreitamente ajustadas a uma velocidade de 8 cm / s. Fechado em uma caixa estanque, o modelo flutua a uma velocidade de 6 cm / s. A serra não funciona apenas no piso plano do laboratório, supera o terreno e passa pedras e grama. SAW não é apenas um brinquedo. Agora foi reduzido para o tamanho de uma caneta (a amostra mais baixa na foto acima). No futuro, o robô poderá ser miniaturizado a tal ponto que poderá remover o intestino humano e coletar amostras para biópsia. O trabalho para redução adicional já está em andamento.Segundo Zarruk, o robô quase não requer manutenção, o que é incomum para a estrutura dinâmica obtida pela impressão 3D. No futuro, o sistema de taxiamento será alterado - o atual não é muito elegante. Os pesquisadores querem tentar juntar dois robôs SAW através de uma dobradiça. E, se acontecer de mudar rapidamente a frequência das ondas e sua amplitude, o robô poderá se adaptar melhor a diferentes superfícies, contorcer tubos de vários diâmetros e otimizar o movimento de cada um dos fluidos.Robô tipo onda de atuador único (SAW): projeto, modelagem e experimentosSource: https://habr.com/ru/post/pt396323/
All Articles