Guia para criar tentáculos mecânicos em casa: Parte 1
 Então, como não gostamos de animatronics? Dobre a pele de silicone de qualquer boneca e você abrirá um conjunto de magia mecatrônica, dando vida a ela na tela grande. Pesquisei na Internet um bom material introdutório sobre esse tópico, mas encontrei apenas um - vídeos educacionais de Stan Winston . Após 30 segundos, senti os tentáculos despertarem meus desejos mais básicos para a construção de coisas tangíveis. Eu esmago, eu apenas tive que construir uma dessas coisas ... ou várias. E aqui está como criar um tentáculo animatrônico muito real.
Então, como não gostamos de animatronics? Dobre a pele de silicone de qualquer boneca e você abrirá um conjunto de magia mecatrônica, dando vida a ela na tela grande. Pesquisei na Internet um bom material introdutório sobre esse tópico, mas encontrei apenas um - vídeos educacionais de Stan Winston . Após 30 segundos, senti os tentáculos despertarem meus desejos mais básicos para a construção de coisas tangíveis. Eu esmago, eu apenas tive que construir uma dessas coisas ... ou várias. E aqui está como criar um tentáculo animatrônico muito real.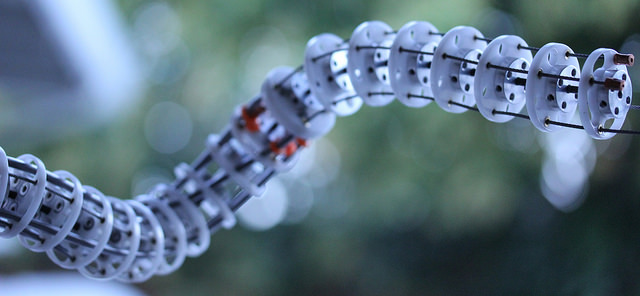 Os iniciantes estão realmente melhor iniciando o mergulho com os tutoriais de Stan Winston. Em duas horas, o instrutor Richard Landon descreve a essência geral, o conjunto de componentes e técnicas necessárias para fazer o mecanismo do tentáculo usando um conjunto de ferramentas típicas - para não mencionar vários exemplos excelentes do filme. [1]Também temos a oportunidade de espiar o mundo da fabricação de dispositivos mais complexos com base nos mesmos princípios. Eu gostaria de começar a história a partir do momento em que ela termina - com tentáculos de duas etapas dobrados em 4 lados. Além disso, farei uma alteração no design dos tentáculos de Landon. Ele permitirá que você construa seu próprio tentáculo e controlador a partir de apenas alguns componentes prontos , poliformldeído [derlin] e o cortador a laser ... Ok, e de algumas partes impressas em uma impressora 3D.
Os iniciantes estão realmente melhor iniciando o mergulho com os tutoriais de Stan Winston. Em duas horas, o instrutor Richard Landon descreve a essência geral, o conjunto de componentes e técnicas necessárias para fazer o mecanismo do tentáculo usando um conjunto de ferramentas típicas - para não mencionar vários exemplos excelentes do filme. [1]Também temos a oportunidade de espiar o mundo da fabricação de dispositivos mais complexos com base nos mesmos princípios. Eu gostaria de começar a história a partir do momento em que ela termina - com tentáculos de duas etapas dobrados em 4 lados. Além disso, farei uma alteração no design dos tentáculos de Landon. Ele permitirá que você construa seu próprio tentáculo e controlador a partir de apenas alguns componentes prontos , poliformldeído [derlin] e o cortador a laser ... Ok, e de algumas partes impressas em uma impressora 3D.
Como funcionam os tentáculos de duas etapas
hackadaycom.files.wordpress.com/2016/08/tentacle_arc_aproximation.pngambas as fases tentáculos, cada um dos quais tem dois graus de liberdadetêm tentáculos têm dois estágios, cada um dos quais tem dois graus de liberdade. Eles permitem que cada passo se dobre em duas direções perpendiculares. Combinando esses graus de liberdade, obtemos quatro no total, o que nos permite imitar movimentos orgânicos completamente plausíveis. Observando a animação, você pode ver a junção das duas etapas - aproximadamente no meio do tentáculo.Com uma boa montagem, podemos controlar as duas partes independentemente uma da outra. Idealmente. Na realidade, não há nada perfeito, e nossos materiais têm suas limitações. Precisamos brincar com tensão e distância intervertebral até alcançarmos resultados satisfatórios. Idealmente, puxando a corda de qualquer uma das etapas, obteremos um arco ideal, diminuindo de diâmetro com o aumento da tensão. Porém, devido às perdas por atrito em cada uma das vértebras, não conseguiremos atingir um arco ideal, embora o resultado seja bom o suficiente para enganar as pessoas do outro lado da tela.Entre as poses do tentáculo disponíveis, não há rotação em torno de seu eixo. Isso foi feito de propósito, uma vez que os marionetistas do passado consideravam esses movimentos não naturais - por exemplo, para caudas de gato ou troncos de elefante. [1]
Idealmente, puxando a corda de qualquer uma das etapas, obteremos um arco ideal, diminuindo de diâmetro com o aumento da tensão. Porém, devido às perdas por atrito em cada uma das vértebras, não conseguiremos atingir um arco ideal, embora o resultado seja bom o suficiente para enganar as pessoas do outro lado da tela.Entre as poses do tentáculo disponíveis, não há rotação em torno de seu eixo. Isso foi feito de propósito, uma vez que os marionetistas do passado consideravam esses movimentos não naturais - por exemplo, para caudas de gato ou troncos de elefante. [1]Esboço de tentáculo
Para entender o princípio de operação, construiremos um tentáculo aproximado de duas placas e um núcleo flexível. Aqui está um desenho do nosso embrião: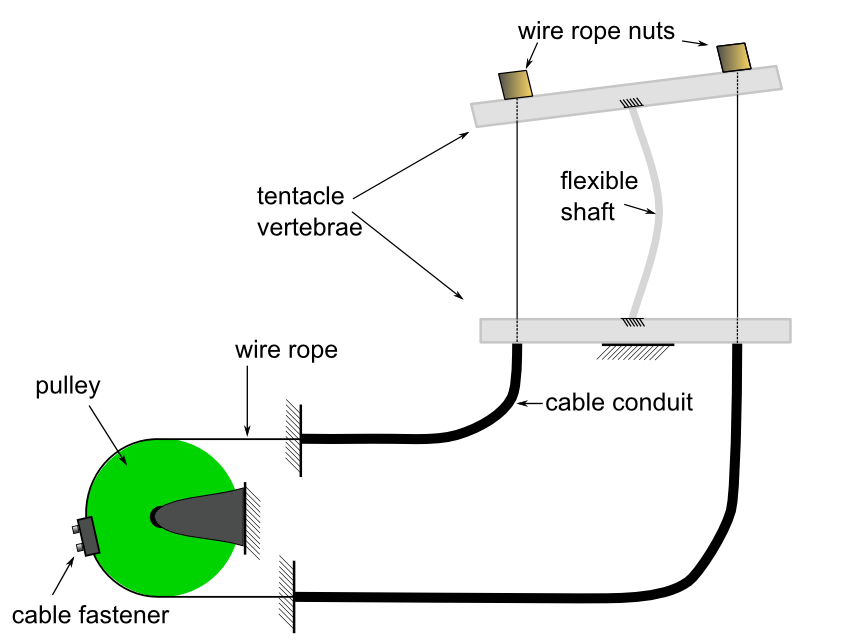 Ao dar rotação à polia, enfraquecemos um cabo e puxamos outro à mesma distância. Encurtar o comprimento dobra o tentáculo em direção ao fio. Como os cabos transmitem apenas tensão, eles devem ser emparelhados com os complementares para garantir o movimento de amplitude total em ambas as direções ao longo de um dos graus de liberdade. Portanto, teremos que trabalhar com 8 cabos diferentes.O tentáculo mantém sua forma devido a seus dois recursos. Primeiro, o conduíte do cabo resiste à compressão. Em segundo lugar, os cabos são apertados e conectados rigidamente à polia. Alterar o comprimento do cabo é a única maneira de mover a vértebra, e o canal do cabo não altera o comprimento. Portanto, a fixação da polia também fixa o tentáculo.
Ao dar rotação à polia, enfraquecemos um cabo e puxamos outro à mesma distância. Encurtar o comprimento dobra o tentáculo em direção ao fio. Como os cabos transmitem apenas tensão, eles devem ser emparelhados com os complementares para garantir o movimento de amplitude total em ambas as direções ao longo de um dos graus de liberdade. Portanto, teremos que trabalhar com 8 cabos diferentes.O tentáculo mantém sua forma devido a seus dois recursos. Primeiro, o conduíte do cabo resiste à compressão. Em segundo lugar, os cabos são apertados e conectados rigidamente à polia. Alterar o comprimento do cabo é a única maneira de mover a vértebra, e o canal do cabo não altera o comprimento. Portanto, a fixação da polia também fixa o tentáculo.O papel do canal a cabo
O canal a cabo desempenha um papel importante no projeto. Sem ele, o movimento do estágio superior levaria a movimentos parasitários do nível inferior, e não precisamos disso. Precisamos controlar independentemente os dois passos.O canal a cabo permite redirecionar a aplicação de forças de uma extremidade ao outro sem o aparecimento de influências espúrias. O canal deve permanecer flexível enquanto resiste à compactação.É interessante que, em nosso esquema, possamos pegar qualquer ponto do canal a cabo e movê-lo sem resistência, porque:1. O canal é flexível.2. Sua parte central, ao longo da qual o cabo passa, não altera o comprimento.As dobras do canal não mudam de comprimento, para que possamos dobrá-lo como quiser, e o tentáculo permanecerá imóvel. Convenientemente!Isso nos permite fazer duas coisas ao mesmo tempo: esticar os cabos que controlam o estágio superior pelo estágio inferior e controlar o estágio superior pelo inferior, sem afetar o último.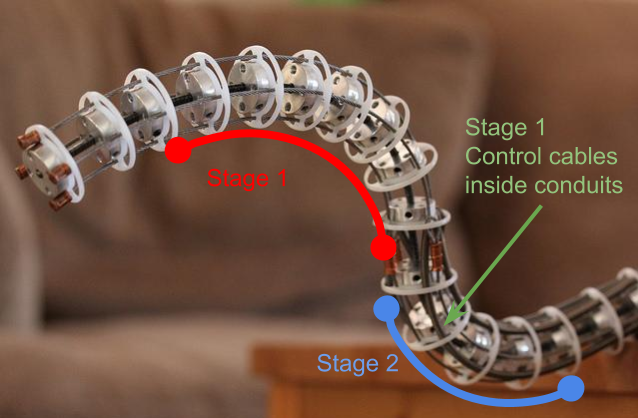 A imagem mostra que os cabos que controlam o 1º estágio passam pelo 2º estágio.
A imagem mostra que os cabos que controlam o 1º estágio passam pelo 2º estágio.Peças de Reposição
Material principal
 Movimentos suaves em todos os graus de liberdade são alcançados através da construção de tentáculos a partir de materiais que resistem à rotação em torno de seu eixo. A maioria das pessoas usa cabos para velocímetros de carros antigos que possuem exatamente essa propriedade. [1] Eu também usei esses cabos pela primeira vez. Infelizmente, o diâmetro deles é de apenas um: 0,125 polegadas, razão pela qual é impossível fazer uma boneca grande que não se dobre com o seu próprio peso. Agora eu prefiro eixos flexíveis a partir de ferramentas de torção . Mas a maioria das imagens neste artigo é feita usando cabos do velocímetro.
Movimentos suaves em todos os graus de liberdade são alcançados através da construção de tentáculos a partir de materiais que resistem à rotação em torno de seu eixo. A maioria das pessoas usa cabos para velocímetros de carros antigos que possuem exatamente essa propriedade. [1] Eu também usei esses cabos pela primeira vez. Infelizmente, o diâmetro deles é de apenas um: 0,125 polegadas, razão pela qual é impossível fazer uma boneca grande que não se dobre com o seu próprio peso. Agora eu prefiro eixos flexíveis a partir de ferramentas de torção . Mas a maioria das imagens neste artigo é feita usando cabos do velocímetro.Segmentos
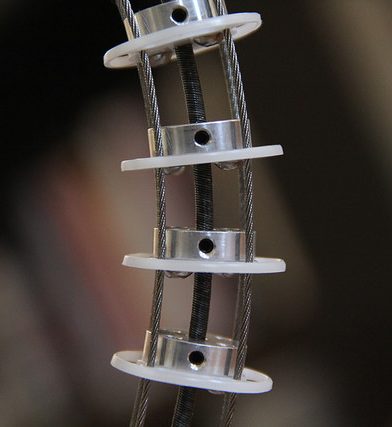
 Cada segmento vertebral deve ser firmemente fixado para que não escorregue e gire. Eles devem guiar corretamente o cabo e nos lugares certos - o canal do cabo, enquanto estão firmemente conectados ao cabo do velocímetro. Landon usa peças de alumínio feitas em uma máquina CNC para isso. Mas eu, vasculhando as lojas, encontrei uma maneira mais simples de usar componentes prontos. Hoje, as peças sobressalentes para robôs são muito populares devido à prevalência desse hobby, e eu pude vértebras da manga universal do Pololu [Pololu Universal Alumínio Mounting Hub] e placas de poliformaldeído [derlin].
Cada segmento vertebral deve ser firmemente fixado para que não escorregue e gire. Eles devem guiar corretamente o cabo e nos lugares certos - o canal do cabo, enquanto estão firmemente conectados ao cabo do velocímetro. Landon usa peças de alumínio feitas em uma máquina CNC para isso. Mas eu, vasculhando as lojas, encontrei uma maneira mais simples de usar componentes prontos. Hoje, as peças sobressalentes para robôs são muito populares devido à prevalência desse hobby, e eu pude vértebras da manga universal do Pololu [Pololu Universal Alumínio Mounting Hub] e placas de poliformaldeído [derlin].Cabo de controle
 Pegue o cabo de controle da mesma forma que nas bicicletas, mas a verdade é mais fina. Utilizei com sucesso dois diâmetros de cabo - 1,2 mm e 0,8 mm. Você pode usar cabos caros, que são processados de forma que não se enrolem, ou apenas brilham na extremidade cortada do cabo até que brilhe. [3]
Pegue o cabo de controle da mesma forma que nas bicicletas, mas a verdade é mais fina. Utilizei com sucesso dois diâmetros de cabo - 1,2 mm e 0,8 mm. Você pode usar cabos caros, que são processados de forma que não se enrolem, ou apenas brilham na extremidade cortada do cabo até que brilhe. [3]Canal de cabo
Há muitas opções para o canal - tubos de nylon, trança de bicicleta, molas. Tudo o que precisamos é que o canal resista à compressão e seja flexível. A resistência à compressão deve fornecer força "igual e oposta" ao movimento. É necessária flexibilidade para que o canal não interfira com outras seções do tentáculo para dobrar. Para mecanismos de estágio único, qualquer uma das opções listadas é adequada. Para várias etapas, a flexibilidade é mais importante. Até agora, na minha experiência, as molas de tração foram mais adequadas como o mais flexível de todos os materiais.Você pode comprar qualquer coisa na loja McMaster-Carr , se souber o nome certo. Nosso canal a cabo é chamado de "mola de extensão de comprimento contínuo" ( 9664K12 ) e custa apenas US $ 4,40 por 36 polegadas. [300 rublos / m]Molas menores podem ser solicitadas ao Dr. E Co Templeman . O custo das molas será maior, mas a variedade é mais rica. Diâmetros muito pequenos podem ser encontrados na Molex .
É necessária flexibilidade para que o canal não interfira com outras seções do tentáculo para dobrar. Para mecanismos de estágio único, qualquer uma das opções listadas é adequada. Para várias etapas, a flexibilidade é mais importante. Até agora, na minha experiência, as molas de tração foram mais adequadas como o mais flexível de todos os materiais.Você pode comprar qualquer coisa na loja McMaster-Carr , se souber o nome certo. Nosso canal a cabo é chamado de "mola de extensão de comprimento contínuo" ( 9664K12 ) e custa apenas US $ 4,40 por 36 polegadas. [300 rublos / m]Molas menores podem ser solicitadas ao Dr. E Co Templeman . O custo das molas será maior, mas a variedade é mais rica. Diâmetros muito pequenos podem ser encontrados na Molex .Ponto de curvatura
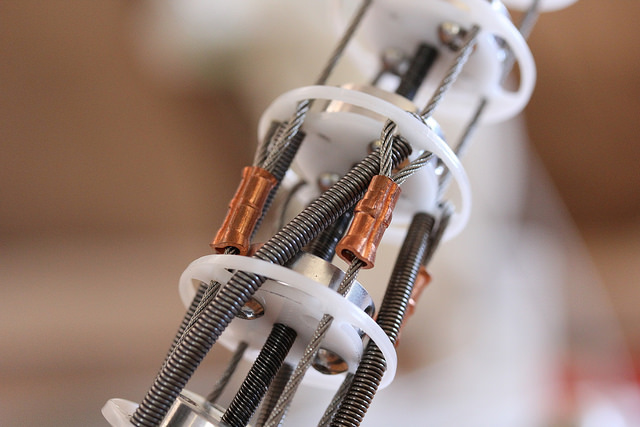 Pela primeira vez, foi bastante difícil para mim imaginar o design desse elemento. No entanto, tendo entendido a localização das extremidades do cabo, esta peça é fácil de construir. Cada cabo que controla a seção inferior termina em um loop. Na mesma vértebra, os canais de cabo terminam, contendo o seguinte conjunto de cabos de controle. A partir daí, o próximo conjunto de cabos continua.
Pela primeira vez, foi bastante difícil para mim imaginar o design desse elemento. No entanto, tendo entendido a localização das extremidades do cabo, esta peça é fácil de construir. Cada cabo que controla a seção inferior termina em um loop. Na mesma vértebra, os canais de cabo terminam, contendo o seguinte conjunto de cabos de controle. A partir daí, o próximo conjunto de cabos continua.Projetos alternativos
Poderíamos usar outro material para as vértebras, por exemplo, madeira - para economizar em buchas de metal? Talvez, mas esse design tenha sido feito não apenas assim, mas com um cálculo.Em primeiro lugar, a complexidade do design deve ser equilibrada com peças acabadas ou com um método de fabricação acessível (cortador a laser e impressora 3D). Portanto, mesmo pessoas com olhos atípicos e destreza podem fazer esse projeto.Em segundo lugar, a tecnologia de fabricação de protótipos deve ser determinística e repetível. O dispositivo deve se comportar da mesma maneira, sendo fabricado em qualquer parte do mundo. Não há necessidade de praticar mágica e orar aos deuses da cola, de pé em uma perna, enquanto o seu epóxi endurece em um nível incomum de umidade. Tecnologias simples que se comportam da mesma maneira em todos os lugares e sempre.Mas procure você mesmo alternativas de design. Finalizei o controlador e o tentáculo, mas isso não significa que o trabalho esteja concluído. Quando a terceira parte do artigo estiver concluída, todo o desenvolvimento estará em suas mãos e você poderá fazer o que quiser com ele.Parte 2Referências
[1] Basics Mecanismo de Stan Winston Cabodetalhado ensinando criação material de antenas simples[2] Animatronics demonstração com Rick Lazzarini 1:21:01Exemplos de velocímetros cordas[3] CS235: Robot design aplicado, Aula 7-Introdução ao cabo TransmissõesIntrodução sobre o uso de cabos em robóticaSource: https://habr.com/ru/post/pt398165/
All Articles