O robô aprendeu a jogar Lego, assistindo uma pessoa
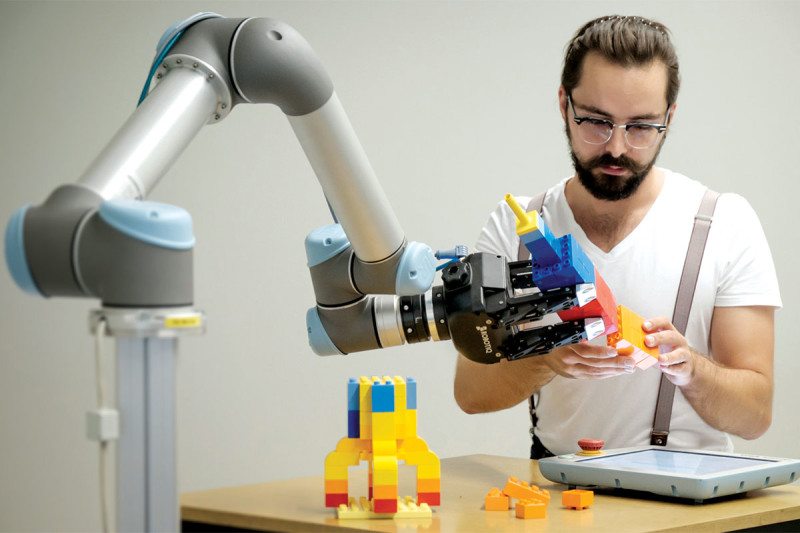 David Vogt ensina um robô a construir um foguete a partir de tijolos de Lego (Fonte: Universidade Estadual do Arizona / TU Freiburg)David Vogt é professor de robótica na Universidade de Mineração e Tecnologia de Freiberg. Ele tem um filho que adora brincar de Lego, além de muitos detalhes desse construtor. Uma vez, um cientista teve a idéia de testar a possibilidade de treinar um robô para montar vários modelos de peças de Lego."Meu filho e eu pensamos que seria bom criar um robô que pudesse fazer o que fazemos quando jogamos " , diz Vogt. Um especialista com um grupo de colegas decidiu comprar um manipulador industrial robótico para seu laboratório. Ao chegar na academia, os robôs foram equipados com uma câmera Kinect.Usando esta câmera, o robô podia observar pessoas que, usando tags para rastrear movimentos, montaram um foguete com peças de Lego. As pessoas montaram um foguete com o mesmo design várias vezes, e o robô gradualmente recebeu mais e mais informações sobre o processo de montagem desse objeto. Depois de algum tempo, ele conseguiu interagir com um parceiro humano, ajudando-o a montar o modelo. Ao mesmo tempo, o robô nem sempre encontrava os detalhes necessários, mas já sabia como procurá-los por conta própria. Segundo especialistas, esse é apenas um exemplo de treinamento de robôs, demonstrando como uma pessoa executa um processo.As pessoas aprendem observando outras pessoas sem muita dificuldade. Por exemplo, as crianças recebem apenas informações sobre o mundo e as ações de outras pessoas. Mas programar um robô para executar uma nova tarefa é muito difícil. Entendemos puramente intuitivamente como concluir uma ou outra tarefa, mas a intuição não está disponível para o robô - todas as ações devem ser rigidamente definidas usando o programa.Mas agora, especialistas em robótica estão tentando dominar um novo método de treinamento de robôs - um método em que os sistemas de computador monitoram as ações humanas através da coleta de dados de observação em um banco de dados. Alguns cientistas tentam controlar as ações dos robôs usando um computador ou telefone, enquanto outros fornecemsuas alas completam a liberdade de ação, permitindo que aprendam com seus próprios erros. Além disso, os robôs aprendem não apenas como montar objetos do Lego.Por exemplo, no ano passado, cientistas da Universidade de Maryland começaram a ensinar seu sistema a cozinhar, permitindo que ele assistisse a vídeos culinários do YouTube.O Google decidiu recentemente realizar seu próprio experimento com robôs de autoaprendizagem. Para isso, foram adquiridos manipuladores industriais, conectados a um único banco de dados. Cada ação de qualquer um dos robôs foi registrada e, em seguida, esses dados foram processados por uma rede neural. Após a análise, o robô recebeu instruções descrevendo o algoritmo ideal de ações. O trabalho que os sistemas tentaram treinar foi abrir uma porta com uma maçaneta.Em um dos experimentos, o robô foi instruído a estudar uma variedade de objetos. São garrafas de água, artigos de papelaria, livros. O sistema rapidamente se acostumou com a tarefa e transmitiu aos “colegas” informações sobre a sequência necessária de suas ações. Depois disso, o sistema recebeu uma nova tarefa - mover um determinado objeto para um determinado ponto. O robô não recebeu instruções sobre as características do objeto, e os objetos estavam constantemente mudando. Como se viu, os robôs podem executar essas tarefas bem, usando os dados acumulados durante o estudo desses objetos. As máquinas conseguiram calcular as consequências de mover o objeto na superfície para o ponto desejado.Quanto à abertura das portas, em um dos casos, uma pessoa ajudou os robôs. Outras máquinas receberam os dados necessários para o treinamento de um robô interagindo com um parceiro humano e, posteriormente, usaram essas informações para repetir as ações de um "colega". Como se viu, com o tempo, os sistemas foram treinados de maneira bastante eficaz por tentativa e erro. Depois que os manipuladores começaram a abrir portas com diferentes tipos de maçanetas sem problemas, as condições da tarefa foram alteradas. Por exemplo, a posição da porta, o ângulo de sua abertura etc. mudou. No experimento final, verificou-se que os robôs podem abrir uma porta e uma fechadura sem ajuda humana, o que eles ainda não encontraram."Quando realizamos determinadas ações, geralmente agimos de forma intuitiva, provavelmente podemos passar essa intuição para robôs, que, como resultado, aprendem e trabalham mais rapidamente", diz um dos desenvolvedores do Google.Um dos problemas desse tipo de treinamento de robô é traduzir informações em um formato compreensível para uma máquina. A maioria dos robôs não possui sensores que lhes permitam perceber o meio ambiente e os fenômenos que ocorrem nele como um ser humano. Portanto, essas informações devem ser adaptadas a cada vez para robôs e seus sistemas de controle. “Um bom professor de robôs entende que está lidando com uma máquina que tem uma maneira diferente de perceber a realidade circundante”, diz Aude Billard, da Escola Politécnica Federal de Lausanne (Suíça).David Vogt e sua equipe estão confiantes de que os humanos podem treinar robôs demonstrando suas ações. Talvez esse método de treinamento possa ser usado nas empresas. Assim, sistemas robóticos podem ser treinados em novas funções sem usar o trabalho de programadores. E assim, um trabalhador comum poderá mostrar ao robô o que precisa ser feito e ele começará a realizar um novo trabalho para si mesmo."Idealmente, humanos e robôs devem poder executar ações que não podem executar separadamente", disse Vogt. Os resultados serão apresentados em breve pelo professor e seus colegas na Conferência Internacional de Robôs Humanóides em Cancun, México.
David Vogt ensina um robô a construir um foguete a partir de tijolos de Lego (Fonte: Universidade Estadual do Arizona / TU Freiburg)David Vogt é professor de robótica na Universidade de Mineração e Tecnologia de Freiberg. Ele tem um filho que adora brincar de Lego, além de muitos detalhes desse construtor. Uma vez, um cientista teve a idéia de testar a possibilidade de treinar um robô para montar vários modelos de peças de Lego."Meu filho e eu pensamos que seria bom criar um robô que pudesse fazer o que fazemos quando jogamos " , diz Vogt. Um especialista com um grupo de colegas decidiu comprar um manipulador industrial robótico para seu laboratório. Ao chegar na academia, os robôs foram equipados com uma câmera Kinect.Usando esta câmera, o robô podia observar pessoas que, usando tags para rastrear movimentos, montaram um foguete com peças de Lego. As pessoas montaram um foguete com o mesmo design várias vezes, e o robô gradualmente recebeu mais e mais informações sobre o processo de montagem desse objeto. Depois de algum tempo, ele conseguiu interagir com um parceiro humano, ajudando-o a montar o modelo. Ao mesmo tempo, o robô nem sempre encontrava os detalhes necessários, mas já sabia como procurá-los por conta própria. Segundo especialistas, esse é apenas um exemplo de treinamento de robôs, demonstrando como uma pessoa executa um processo.As pessoas aprendem observando outras pessoas sem muita dificuldade. Por exemplo, as crianças recebem apenas informações sobre o mundo e as ações de outras pessoas. Mas programar um robô para executar uma nova tarefa é muito difícil. Entendemos puramente intuitivamente como concluir uma ou outra tarefa, mas a intuição não está disponível para o robô - todas as ações devem ser rigidamente definidas usando o programa.Mas agora, especialistas em robótica estão tentando dominar um novo método de treinamento de robôs - um método em que os sistemas de computador monitoram as ações humanas através da coleta de dados de observação em um banco de dados. Alguns cientistas tentam controlar as ações dos robôs usando um computador ou telefone, enquanto outros fornecemsuas alas completam a liberdade de ação, permitindo que aprendam com seus próprios erros. Além disso, os robôs aprendem não apenas como montar objetos do Lego.Por exemplo, no ano passado, cientistas da Universidade de Maryland começaram a ensinar seu sistema a cozinhar, permitindo que ele assistisse a vídeos culinários do YouTube.O Google decidiu recentemente realizar seu próprio experimento com robôs de autoaprendizagem. Para isso, foram adquiridos manipuladores industriais, conectados a um único banco de dados. Cada ação de qualquer um dos robôs foi registrada e, em seguida, esses dados foram processados por uma rede neural. Após a análise, o robô recebeu instruções descrevendo o algoritmo ideal de ações. O trabalho que os sistemas tentaram treinar foi abrir uma porta com uma maçaneta.Em um dos experimentos, o robô foi instruído a estudar uma variedade de objetos. São garrafas de água, artigos de papelaria, livros. O sistema rapidamente se acostumou com a tarefa e transmitiu aos “colegas” informações sobre a sequência necessária de suas ações. Depois disso, o sistema recebeu uma nova tarefa - mover um determinado objeto para um determinado ponto. O robô não recebeu instruções sobre as características do objeto, e os objetos estavam constantemente mudando. Como se viu, os robôs podem executar essas tarefas bem, usando os dados acumulados durante o estudo desses objetos. As máquinas conseguiram calcular as consequências de mover o objeto na superfície para o ponto desejado.Quanto à abertura das portas, em um dos casos, uma pessoa ajudou os robôs. Outras máquinas receberam os dados necessários para o treinamento de um robô interagindo com um parceiro humano e, posteriormente, usaram essas informações para repetir as ações de um "colega". Como se viu, com o tempo, os sistemas foram treinados de maneira bastante eficaz por tentativa e erro. Depois que os manipuladores começaram a abrir portas com diferentes tipos de maçanetas sem problemas, as condições da tarefa foram alteradas. Por exemplo, a posição da porta, o ângulo de sua abertura etc. mudou. No experimento final, verificou-se que os robôs podem abrir uma porta e uma fechadura sem ajuda humana, o que eles ainda não encontraram."Quando realizamos determinadas ações, geralmente agimos de forma intuitiva, provavelmente podemos passar essa intuição para robôs, que, como resultado, aprendem e trabalham mais rapidamente", diz um dos desenvolvedores do Google.Um dos problemas desse tipo de treinamento de robô é traduzir informações em um formato compreensível para uma máquina. A maioria dos robôs não possui sensores que lhes permitam perceber o meio ambiente e os fenômenos que ocorrem nele como um ser humano. Portanto, essas informações devem ser adaptadas a cada vez para robôs e seus sistemas de controle. “Um bom professor de robôs entende que está lidando com uma máquina que tem uma maneira diferente de perceber a realidade circundante”, diz Aude Billard, da Escola Politécnica Federal de Lausanne (Suíça).David Vogt e sua equipe estão confiantes de que os humanos podem treinar robôs demonstrando suas ações. Talvez esse método de treinamento possa ser usado nas empresas. Assim, sistemas robóticos podem ser treinados em novas funções sem usar o trabalho de programadores. E assim, um trabalhador comum poderá mostrar ao robô o que precisa ser feito e ele começará a realizar um novo trabalho para si mesmo."Idealmente, humanos e robôs devem poder executar ações que não podem executar separadamente", disse Vogt. Os resultados serão apresentados em breve pelo professor e seus colegas na Conferência Internacional de Robôs Humanóides em Cancun, México.Source: https://habr.com/ru/post/pt398751/
All Articles