Futuros robôs aprenderão por curiosidade e autodeterminação de objetivos
 Imagine que um amigo peça para você ajudar a limpar o quarto, cheio de coisas e móveis diferentes. Mas imagine também que ele não irá ajudá-lo com isso, mas simplesmente descreva para você, mostrando as fotos, como ele gostaria que seu quarto aparecesse no final. A tarefa pode parecer chata, mas qualquer um de nós vai lidar com ela. Quando crianças, descobrimos novos objetos, aprendemos a reconhecê-los e desenvolvemos habilidades para lidar com eles. Empurrados pela curiosidade, gradualmente desenvolvemos conhecimento visual, atento e sensório-motor, permitindo que nós, adultos, tratemos nosso ambiente físico de nossa escolha.Os robôs de hoje não estão adaptados para essas tarefas. Imagine um robô humanóide ajudando a arrumar uma sala. Suponha que você mostrou a um robô uma sala em um estado normal e limpo e, quando houver uma bagunça, peça ao robô que o remova ao seu estado original. Em tais condições, seria muito cansativo ensinar ao robô onde direcionar a atenção e como gerenciar cada um dos objetos para colocá-lo na posição correta no lugar certo ou como construir uma sequência de ações.E, embora robôs novos e complexos e algoritmos avançados apareçam anualmente, executar tarefas complexas e encontrar soluções desconhecidas para tarefas diferentes requer uma programação tediosa de detalhes relacionados às habilidades motoras de nível inferior. Na melhor das hipóteses, os robôs podem aprender um pequeno conjunto de ações inflexíveis. Comparando as realizações atuais da IA com a inteligência biológica, veremos que a AI ainda tem limitações de autonomia e flexibilidade.Os robôs do futuro precisarão aprender a compreender autonomamente seus arredores, ou seja, determinar objetivos de forma independente e adquirir efetivamente habilidades para alcançá-los, com base na aquisição, modificação, generalização e recombinação de conhecimentos e habilidades adquiridos anteriormente. Isso permitirá que, com um pouco de treinamento extra, alterem seu ambiente do estado atual para uma ampla variedade de estados finais definidos como uma meta pelo usuário. A questão é: como podemos criar robôs do futuro que possam lidar com essa tarefa?
Imagine que um amigo peça para você ajudar a limpar o quarto, cheio de coisas e móveis diferentes. Mas imagine também que ele não irá ajudá-lo com isso, mas simplesmente descreva para você, mostrando as fotos, como ele gostaria que seu quarto aparecesse no final. A tarefa pode parecer chata, mas qualquer um de nós vai lidar com ela. Quando crianças, descobrimos novos objetos, aprendemos a reconhecê-los e desenvolvemos habilidades para lidar com eles. Empurrados pela curiosidade, gradualmente desenvolvemos conhecimento visual, atento e sensório-motor, permitindo que nós, adultos, tratemos nosso ambiente físico de nossa escolha.Os robôs de hoje não estão adaptados para essas tarefas. Imagine um robô humanóide ajudando a arrumar uma sala. Suponha que você mostrou a um robô uma sala em um estado normal e limpo e, quando houver uma bagunça, peça ao robô que o remova ao seu estado original. Em tais condições, seria muito cansativo ensinar ao robô onde direcionar a atenção e como gerenciar cada um dos objetos para colocá-lo na posição correta no lugar certo ou como construir uma sequência de ações.E, embora robôs novos e complexos e algoritmos avançados apareçam anualmente, executar tarefas complexas e encontrar soluções desconhecidas para tarefas diferentes requer uma programação tediosa de detalhes relacionados às habilidades motoras de nível inferior. Na melhor das hipóteses, os robôs podem aprender um pequeno conjunto de ações inflexíveis. Comparando as realizações atuais da IA com a inteligência biológica, veremos que a AI ainda tem limitações de autonomia e flexibilidade.Os robôs do futuro precisarão aprender a compreender autonomamente seus arredores, ou seja, determinar objetivos de forma independente e adquirir efetivamente habilidades para alcançá-los, com base na aquisição, modificação, generalização e recombinação de conhecimentos e habilidades adquiridos anteriormente. Isso permitirá que, com um pouco de treinamento extra, alterem seu ambiente do estado atual para uma ampla variedade de estados finais definidos como uma meta pelo usuário. A questão é: como podemos criar robôs do futuro que possam lidar com essa tarefa?Objetivo-Projeto Robôs
Em busca de uma resposta para essa pergunta, foi lançado um projeto importante para o uso da IA - o projeto europeu, supervisionado pelo Laboratório de Neurociência Incorporada Computacional , LOCEN, um grupo de pesquisa italiano baseado no Instituto de Ciências e Tecnologia Cognitivas, de propriedade da pesquisa estatal italiana Comitê ( ISTC-CNR ).O projeto GOAL-Robots - Robôs de Aprendizagem Autônoma Abertos com Objetivos Abertos ficou em primeiro lugar na lista de 11 projetos que receberam financiamento entre 800 participantes da teleconferência da UE FET-OPEN(Future Emergent Technologies) e faz parte do programa de pesquisa da UE Horizonte 2020. O LOCEN e seu orientador acadêmico, Gianluca Baldassarre, coordenarão um consórcio que incluirá três grupos de pesquisa europeus mais importantes:1. Laboratório de Psicologia e Percepção (LPP) da França, liderado por Kevin O'Regan, trabalhando no Instituto de Neurologia e Ciências Cognitivas de Paris chamado Descartes, realizará experimentos relacionados à aquisição de habilidades e objetivos em crianças.2. O Instituto de Estudos Avançados de Frankfurt (FIAS), na Alemanha, liderado por Jochen Triesch, se concentrará no desenvolvimento de sistemas visuais e habilidades motoras semelhantes às biológicas.3)Uma equipe de especialistas em robótica liderada por Jan Peters, Universidade de Tecnologia de Darmstadt (TUDa) na Alemanha, demonstrará robôs para o projeto.A GOAL-Robots segue o projeto europeu anterior IM-CLeVeR (“robôs universais de aprendizado acumulado motivados internamente”), no qual o LOCEN e parceiros anteriores estudaram o papel da motivação intrínseca (VM) na indução da auto-aprendizagem em organismos vivos e em robôs. A pesquisa sobre VM começou observando como as crianças, por curiosidade, exploram e interagem com o mundo exterior, adquirindo conhecimento sobre como as coisas funcionam e obtendo um grande repertório de habilidades motoras sensoriais para interagir com elas.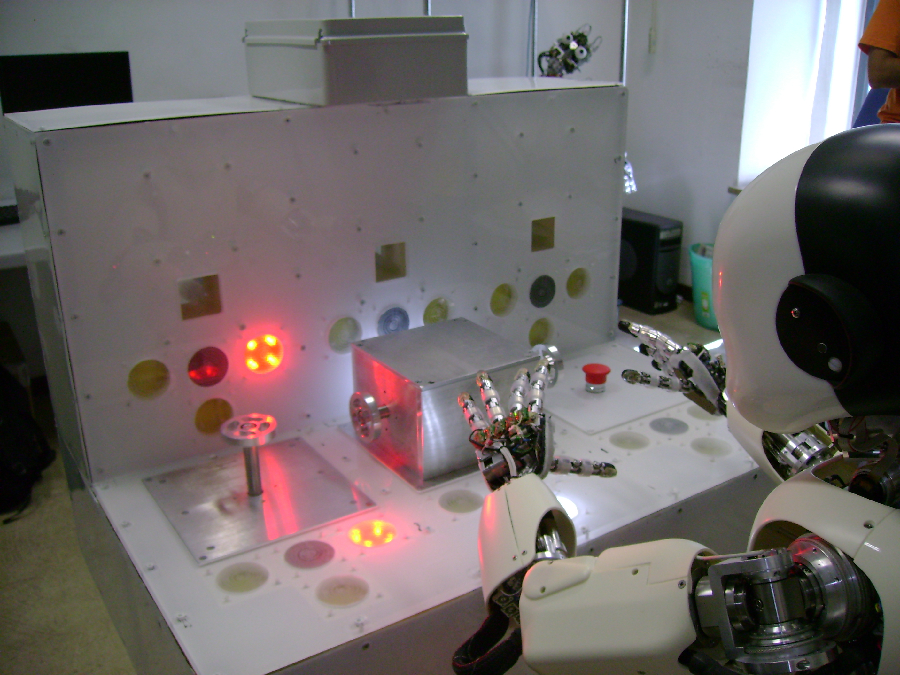 Se a curiosidade e as VMs são a base da universalidade e adaptabilidade humanas, a IA com arquitetura e algoritmos que emulam VMs pode ajudar a criar um "mecanismo motivacional" que guiará os robôs por um processo de aprendizado aberto autônomo que não requer programação constante e treinamento humano.A GOAL-Robots também adiciona um componente importante ao desenvolvimento do treinamento de robôs abertos: objetivos. Um objetivo é uma representação interna de uma pessoa sobre o mundo, o estado de um corpo ou evento ou um conjunto de eventos que possui duas propriedades importantes. Primeiro, uma pessoa pode causar essa idéia mesmo na ausência de percepção do estado correspondente do mundo ou evento. Segundo, esse desafio tem um efeito motivacional, ou seja, pode afetar a escolha, focar a personalidade e o comportamento, e levar seu processo de aprendizado a alcançar a meta. A capacidade de criar objetivos motivacionais à vontade, embora abstrata, e seu uso na escolha de ações e treinamento, é um elemento essencial da flexibilidade comportamental e da capacidade de treinar indivíduos biológicos. Os participantes do projeto acreditamque fornecer aos robôs mecanismos adequados para a formação e a busca de metas de treinamento aumentará radicalmente seu potencial de aprendizado independente.
Se a curiosidade e as VMs são a base da universalidade e adaptabilidade humanas, a IA com arquitetura e algoritmos que emulam VMs pode ajudar a criar um "mecanismo motivacional" que guiará os robôs por um processo de aprendizado aberto autônomo que não requer programação constante e treinamento humano.A GOAL-Robots também adiciona um componente importante ao desenvolvimento do treinamento de robôs abertos: objetivos. Um objetivo é uma representação interna de uma pessoa sobre o mundo, o estado de um corpo ou evento ou um conjunto de eventos que possui duas propriedades importantes. Primeiro, uma pessoa pode causar essa idéia mesmo na ausência de percepção do estado correspondente do mundo ou evento. Segundo, esse desafio tem um efeito motivacional, ou seja, pode afetar a escolha, focar a personalidade e o comportamento, e levar seu processo de aprendizado a alcançar a meta. A capacidade de criar objetivos motivacionais à vontade, embora abstrata, e seu uso na escolha de ações e treinamento, é um elemento essencial da flexibilidade comportamental e da capacidade de treinar indivíduos biológicos. Os participantes do projeto acreditamque fornecer aos robôs mecanismos adequados para a formação e a busca de metas de treinamento aumentará radicalmente seu potencial de aprendizado independente.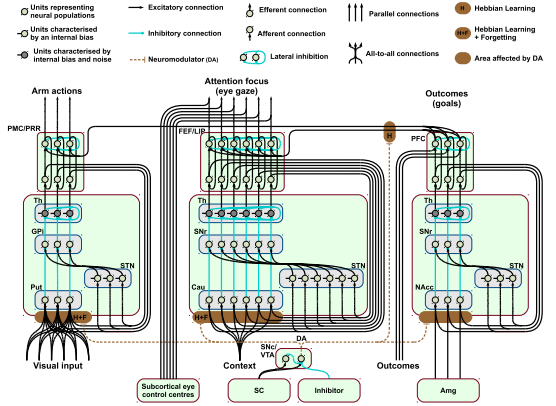
Tarefas e idéias
A ideia do projeto é uma combinação de mecanismos relacionados à VM e a motivação de objetivos de energia. Em particular, a VM estimulará os robôs a descobrir independentemente novos eventos interessantes que ocorreram devido às ações deles mesmos. Os robôs exploram seus arredores sob a influência da curiosidade e definem objetivos cada vez mais complexos de forma independente, e os usam para obter várias habilidades em um estilo aberto. Um processo aberto para adquirir habilidades requer mecanismos complexos e a integração de vários componentes da arquitetura. Em particular, os robôs precisarão adquirir novas habilidades sem interromper as habilidades adquiridas anteriormente e, ao mesmo tempo, reutilizar as habilidades adquiridas anteriormente para acelerar a aquisição de novas (transferência de conhecimento). Além disso, eles precisarão aprender a combinar habilidades pré-adquiridas para criar habilidades mais complexas. Esses são os desafios mais importantes da IA para hoje. Para resolvê-los, o projeto usará algoritmos avançados, tanto para o processamento de informações sensoriais (por exemplo, usando redes de aprendizado profundo) quanto para organizar e usar conhecimentos relacionados às habilidades motoras (por exemplo, usando primitivas de movimento dinâmico e redes neurais com efeito de eco [echo redes neurais estaduais]).Todos os mecanismos associados a diferentes partes do processo de aprendizado precisarão ser integrados em uma arquitetura de controle: os processos de formação de objetivos de alto nível serão combinados com as camadas motivacionais nas quais, com base na VM, o robô formará e selecionará objetivos. Os objetivos serão gradualmente associados ao nível mais baixo dos controladores, de modo que o robô possa recuperar as habilidades adquiridas para atingir os objetivos desejados e criar habilidades mais complexas com base na combinação dos anteriores. A transferência de conhecimento entre diferentes habilidades será integrada, levando em consideração a necessidade de eliminar a interferência mútua, e assim por diante. Esses mecanismos são úteis não apenas para a fase de aprendizado independente, mas também para a possibilidade de usar o conhecimento adquirido pelo usuário.
Um processo aberto para adquirir habilidades requer mecanismos complexos e a integração de vários componentes da arquitetura. Em particular, os robôs precisarão adquirir novas habilidades sem interromper as habilidades adquiridas anteriormente e, ao mesmo tempo, reutilizar as habilidades adquiridas anteriormente para acelerar a aquisição de novas (transferência de conhecimento). Além disso, eles precisarão aprender a combinar habilidades pré-adquiridas para criar habilidades mais complexas. Esses são os desafios mais importantes da IA para hoje. Para resolvê-los, o projeto usará algoritmos avançados, tanto para o processamento de informações sensoriais (por exemplo, usando redes de aprendizado profundo) quanto para organizar e usar conhecimentos relacionados às habilidades motoras (por exemplo, usando primitivas de movimento dinâmico e redes neurais com efeito de eco [echo redes neurais estaduais]).Todos os mecanismos associados a diferentes partes do processo de aprendizado precisarão ser integrados em uma arquitetura de controle: os processos de formação de objetivos de alto nível serão combinados com as camadas motivacionais nas quais, com base na VM, o robô formará e selecionará objetivos. Os objetivos serão gradualmente associados ao nível mais baixo dos controladores, de modo que o robô possa recuperar as habilidades adquiridas para atingir os objetivos desejados e criar habilidades mais complexas com base na combinação dos anteriores. A transferência de conhecimento entre diferentes habilidades será integrada, levando em consideração a necessidade de eliminar a interferência mútua, e assim por diante. Esses mecanismos são úteis não apenas para a fase de aprendizado independente, mas também para a possibilidade de usar o conhecimento adquirido pelo usuário. A cada ano, o projeto apresentará um “robô de demonstração”, e plataformas robóticas complexas (como iCub ou Kuka) serão conduzidas por arquiteturas desenvolvidas no projeto para resolver problemas de complexidade crescente. Esses demonstradores não apenas mostrarão o progresso do projeto, mas também se tornarão critérios para comparar o progresso no desenvolvimento de robôs independentes.O demonstrador final terá que enfrentar a tarefa formulada no início do artigo: é possível ao robô demonstrar universalidade e adaptabilidade semelhantes às humanas, interagindo com o mundo real? Em particular, os robôs terão a tarefa de: a) estudar a posição de vários objetos localizados em contêineres e prateleiras correspondentes à ordem eb) reproduzir esse estado depois que o usuário mover e trocar os objetos.Se o projeto GOAL-Robots cumprir suas promessas, você não precisará mais se preocupar com amigos preguiçosos: quando eles pedirem ajuda, basta pedir a seus amigos artificiais para ajudá-los!
A cada ano, o projeto apresentará um “robô de demonstração”, e plataformas robóticas complexas (como iCub ou Kuka) serão conduzidas por arquiteturas desenvolvidas no projeto para resolver problemas de complexidade crescente. Esses demonstradores não apenas mostrarão o progresso do projeto, mas também se tornarão critérios para comparar o progresso no desenvolvimento de robôs independentes.O demonstrador final terá que enfrentar a tarefa formulada no início do artigo: é possível ao robô demonstrar universalidade e adaptabilidade semelhantes às humanas, interagindo com o mundo real? Em particular, os robôs terão a tarefa de: a) estudar a posição de vários objetos localizados em contêineres e prateleiras correspondentes à ordem eb) reproduzir esse estado depois que o usuário mover e trocar os objetos.Se o projeto GOAL-Robots cumprir suas promessas, você não precisará mais se preocupar com amigos preguiçosos: quando eles pedirem ajuda, basta pedir a seus amigos artificiais para ajudá-los!Source: https://habr.com/ru/post/pt398815/
All Articles