Desenvolvimento de um kit de eletrificação de bicicletas
Saudações a todos que gostam de eletrônicos! Meu nome é Vasily Sukhoparov, sou o diretor técnico da Eczo.bike. Quero falar sobre como desenvolvemos um kit de eletrificação de bicicletas, quais armadilhas tivemos que enfrentar e quais truques de engenharia seguir. A seguir, haverá um pouco de programação do STM32, circuitos, os meandros do design de placas de potência e algumas palavras sobre o componente mecânico do CEM (Kit de Eletrificação de Bicicleta). Kit de eletrificação com uma potência máxima de 2600 W, computador de bordo, rastreador e baterias substituíveis.
Por que tudo isso foi inventado?
Tendo a experiência de automontagem de uma bicicleta elétrica em peças e um grande número de cones embalados no processo, me levou a entender que no momento não há ofertas no mercado que atendam a todas as minhas necessidades.Todos os detalhes tinham que ser personalizados, fazendas coletivas, inventavam algo do zero. Você não pode simplesmente pegar e conectar os eletrônicos a uma bicicleta, como uma nova placa de vídeo em um computador. Não havia sistema Plug and Play Ride.Seu próprio sistema poderia fornecer:- modularidade- interface amigável- a capacidade de ajustar-se- não há necessidade de soldar os conectores e, geralmente, conhecimento de eletrônica- baixo pesoTudo o que foi dito acima é o que um usuário comum terá que enfrentar quando quiser se equipar novamente com os componentes chineses. Com essa abordagem, a construção de bicicletas elétricas permanecerá por muito tempo o grande número de nerds e engenheiros eletrônicos, incapazes de entrar nas massas.As soluções industriais não brilham com energia especial (até 1000W) e geralmente são incorporadas em seus próprios quadros de bicicleta. No aspirador doméstico, existem mais "cavalos" :) Não é necessário falar sobre configurabilidade e conectar recursos adicionais.Gradualmente, a partir do desenvolvimento de um computador de bordo no porão da sua casa (literalmente) e terminando com um inversor, um sistema de gerenciamento de bateria e todo o kit como um todo, ele entendeu como tudo deve ser construído para garantir o máximo conforto ao usar este dispositivo. Ao mesmo tempo, para que a coisa funcionasse para o usuário, e não para o usuário, ele precisou gastar tempo para fazê-la funcionar.Com o que você acabou?
O protótipo na imagem antes da montagem do kat em grande parte por mão de obra manual, as placas foram soldadas diretamente no escritório e os programas foram programados ali mesmo. As caixas feitas de blocos de plástico sólido foram fresadas em CNC, a armação de metal foi feita em produção. As baterias foram montadas por seu próprio trabalho, usando a tecnologia à la Tesla, cujo componente básico é um elemento no fator de forma 18650, células semelhantes são encontradas na maioria dos laptops. Sim, formalmente Tesla monta baterias de laptop :-) O computador de bordo mostra não apenas a tensão da bateria ou a porcentagem de carga (que às vezes não é informativa), mas também o consumo em W * h, consumo específico de energia W * h / km e alcance, três parâmetros principais que você deseja saber quando estiver dirigindo para algum lugar distante e você precisa planejar uma rota. Com o aumento da velocidade, a resistência do ar também aumenta, além disso, em progressão e é a principal contribuição para o consumo de energia durante o movimento. Você pode economizar menos pressionando o chinelo no chão ou girando os pedais.
O computador de bordo mostra não apenas a tensão da bateria ou a porcentagem de carga (que às vezes não é informativa), mas também o consumo em W * h, consumo específico de energia W * h / km e alcance, três parâmetros principais que você deseja saber quando estiver dirigindo para algum lugar distante e você precisa planejar uma rota. Com o aumento da velocidade, a resistência do ar também aumenta, além disso, em progressão e é a principal contribuição para o consumo de energia durante o movimento. Você pode economizar menos pressionando o chinelo no chão ou girando os pedais.
 BMS (Sistema de gerenciamento de bateria) - um sistema de gerenciamento de bateria. Calcula a carga / descarga, controla o processo de carregamento dos elementos e os equilibra, se necessário. A diferença do BMS convencional está novamente na confiabilidade, na maioria das vezes o BMS chinês queimou durante um curto-circuito com uma chama. Você pode ver a tensão em cada elemento da bateria, sob carga, você pode controlar sua resistência interna. O principal defeito das baterias é o aumento da auto-descarga e a deterioração do ext. resistência, que pode danificar a bateria inteira se não for notada a tempo.Monitoramento térmico embutido. A adição deste módulo ao sistema permite que você use a carga da bateria ao máximo possível sem comprometer sua saúde, por exemplo, reduzir a energia quando a bateria está quase completamente descarregada ou em temperaturas muito frias / quentes, acelera o processo de carregamento usando seu próprio algoritmo de balanceamento.
BMS (Sistema de gerenciamento de bateria) - um sistema de gerenciamento de bateria. Calcula a carga / descarga, controla o processo de carregamento dos elementos e os equilibra, se necessário. A diferença do BMS convencional está novamente na confiabilidade, na maioria das vezes o BMS chinês queimou durante um curto-circuito com uma chama. Você pode ver a tensão em cada elemento da bateria, sob carga, você pode controlar sua resistência interna. O principal defeito das baterias é o aumento da auto-descarga e a deterioração do ext. resistência, que pode danificar a bateria inteira se não for notada a tempo.Monitoramento térmico embutido. A adição deste módulo ao sistema permite que você use a carga da bateria ao máximo possível sem comprometer sua saúde, por exemplo, reduzir a energia quando a bateria está quase completamente descarregada ou em temperaturas muito frias / quentes, acelera o processo de carregamento usando seu próprio algoritmo de balanceamento. Um motor externo foi escolhido para a conversão da bicicleta, só permite que você tenha um bom momento no volante e mais potência com menos peso. Este motor pesa 3 kg. Para comparação, o motor da roda pode ser de dois tipos: acionamento direto - acionamento direto - é fornecido em 1000W ou mais, mas pesa de 6 kg a 23 kg apenas por motor. Engrenagem - engrenagem - até 500W de peso de 2 kg e literalmente alguns motores de 1000W de até 4,5 kg. No primeiro caso, é necessário colocar aros reforçados na bicicleta, e é necessário acumular ferro no ponto de fixação do eixo do motor, para que o quadro não desmorone. Mas nem uma única roda de motor em uma categoria de peso semelhante permite obter um momento da ordem de 160 Nm na roda traseira.
Um motor externo foi escolhido para a conversão da bicicleta, só permite que você tenha um bom momento no volante e mais potência com menos peso. Este motor pesa 3 kg. Para comparação, o motor da roda pode ser de dois tipos: acionamento direto - acionamento direto - é fornecido em 1000W ou mais, mas pesa de 6 kg a 23 kg apenas por motor. Engrenagem - engrenagem - até 500W de peso de 2 kg e literalmente alguns motores de 1000W de até 4,5 kg. No primeiro caso, é necessário colocar aros reforçados na bicicleta, e é necessário acumular ferro no ponto de fixação do eixo do motor, para que o quadro não desmorone. Mas nem uma única roda de motor em uma categoria de peso semelhante permite obter um momento da ordem de 160 Nm na roda traseira.Características KEV
2600
70
50
36,4~54.6V
1C (~1 )
CAN
DC-DC OUT: 13V 13W + 10W
FSTN 240x128 2.8"
Bluetooth 4,0 BMS
Para garantir a universalidade da conexão, foram selecionados um barramento CAN com uma voltagem interna de 13V e um barramento de força separado com voltagem da bateria.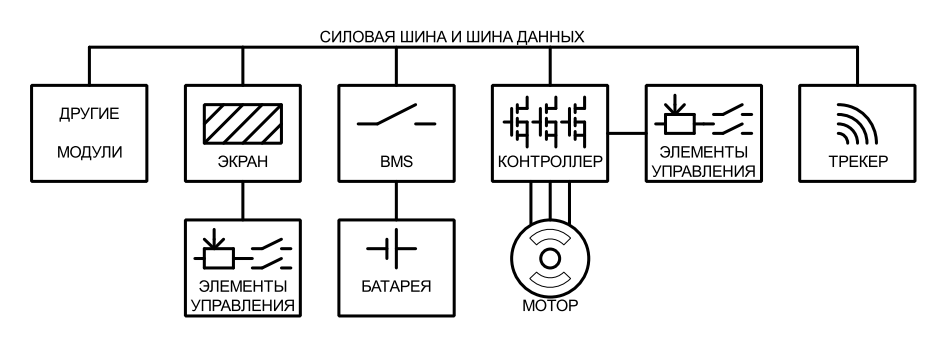 O coração de todo o sistema é o controlador que controla o motor. Ele converte a voltagem direta da bateria em voltagem alternada com uma frequência de até 1500 Hz. (A frequência PWM é maior - até 20 kHz) Os sinais de controle são recebidos diretamente ou do computador de bordo (tela) através do barramento CAN. Ele também possui um conversor interno Ubat. a 13V para garantir a operação dos módulos.A bateria está conectada à rede pública via BMS, como mencionado acima, monitora a bateria para garantir sua longa vida útil. Também possui um conversor de 13V para operação dos módulos.O computador de bordo é conectado via barramento CAN com a tensão interna, exibe as informações que recebe dos módulos e também pode gravar dados no cartão SD.O rastreador também é conectado via CAN + 13V e tem à sua disposição uma pequena bateria para proteger contra roubo de bicicleta quando a bateria principal está ausente.O sistema suporta a conexão de até 4 baterias e controladores ao mesmo tempo, por exemplo, para controlar veículos de quatro rodas.
O coração de todo o sistema é o controlador que controla o motor. Ele converte a voltagem direta da bateria em voltagem alternada com uma frequência de até 1500 Hz. (A frequência PWM é maior - até 20 kHz) Os sinais de controle são recebidos diretamente ou do computador de bordo (tela) através do barramento CAN. Ele também possui um conversor interno Ubat. a 13V para garantir a operação dos módulos.A bateria está conectada à rede pública via BMS, como mencionado acima, monitora a bateria para garantir sua longa vida útil. Também possui um conversor de 13V para operação dos módulos.O computador de bordo é conectado via barramento CAN com a tensão interna, exibe as informações que recebe dos módulos e também pode gravar dados no cartão SD.O rastreador também é conectado via CAN + 13V e tem à sua disposição uma pequena bateria para proteger contra roubo de bicicleta quando a bateria principal está ausente.O sistema suporta a conexão de até 4 baterias e controladores ao mesmo tempo, por exemplo, para controlar veículos de quatro rodas.Em conclusão
Nos artigos a seguir, vou falar mais sobre o desenvolvimento do computador de bordo, controlador, sistema de gerenciamento de bateria e como montamos as baterias a partir das células. Se for interessante, escreverei um artigo separado sobre o teste do inversor em um suporte dinâmico ou sobre como medir a eficiência do conjunto motor + controlador em casa. Source: https://habr.com/ru/post/pt399029/
All Articles