 Um carro moderno não é apenas um meio de transporte, mas também um dispositivo avançado com funções multimídia e um sistema de controle eletrônico para unidades e um monte de sensores. Muitos fabricantes de automóveis oferecem as funções de assistentes de movimento, assistentes de estacionamento, monitoramento e controle de automóveis por telefone. Isso é possível devido ao uso de um barramento CAN no carro ao qual todos os sistemas estão conectados: motor, sistema de freio, volante, multimídia, clima, etc.Meu carro é o Skoda Octavia 2011. Ele não oferece recursos de controle do telefone, então decidi corrigir essa desvantagem e, ao mesmo tempo, adicionar a função de controle de voz. Como gateway entre o barramento CAN e o telefone, eu uso o Raspberry Pi com a blindagem CAN BUS e o roteador WiFi TP-Link. O protocolo de comunicação dos agregados automáticos está fechado e a Volkswagen respondeu a todas as minhas cartas com a documentação do protocolo. Portanto, a única maneira de descobrir como os dispositivos se comunicam nos carros e aprender a gerenciá-los é a engenharia reversa do protocolo CAN do barramento VW.Atuei em etapas:
Um carro moderno não é apenas um meio de transporte, mas também um dispositivo avançado com funções multimídia e um sistema de controle eletrônico para unidades e um monte de sensores. Muitos fabricantes de automóveis oferecem as funções de assistentes de movimento, assistentes de estacionamento, monitoramento e controle de automóveis por telefone. Isso é possível devido ao uso de um barramento CAN no carro ao qual todos os sistemas estão conectados: motor, sistema de freio, volante, multimídia, clima, etc.Meu carro é o Skoda Octavia 2011. Ele não oferece recursos de controle do telefone, então decidi corrigir essa desvantagem e, ao mesmo tempo, adicionar a função de controle de voz. Como gateway entre o barramento CAN e o telefone, eu uso o Raspberry Pi com a blindagem CAN BUS e o roteador WiFi TP-Link. O protocolo de comunicação dos agregados automáticos está fechado e a Volkswagen respondeu a todas as minhas cartas com a documentação do protocolo. Portanto, a única maneira de descobrir como os dispositivos se comunicam nos carros e aprender a gerenciá-los é a engenharia reversa do protocolo CAN do barramento VW.Atuei em etapas:- Desenvolvimento do escudo CAN para Raspberry Pi
- Instalando o software para trabalhar com o barramento CAN
- Conexão ao barramento CAN de um carro
- Desenvolvimento de um sniffer e estudo do protocolo de barramento CAN
- Desenvolvimento de aplicativos para telefone
- Controle de voz com Homekit e Siri
No final da janela de controle de voz do vídeo.Desenvolvimento do escudo CAN para Raspberry Pi
Aqui, o esquema de blindagem foi adotado pelo lnxpps.de/rpie , também há uma descrição das conclusões, 2 microcircuitos MCP2515 e MCP2551 são usados para se comunicar com o CAN. 2 fios CAN-High e CAN-Low estão conectados à blindagem. No SprintLayout 6, espalhei o quadro, alguém pode ser útil no CANBoardRPi.lay (na foto do título, o protótipo do escudo na placa de ensaio).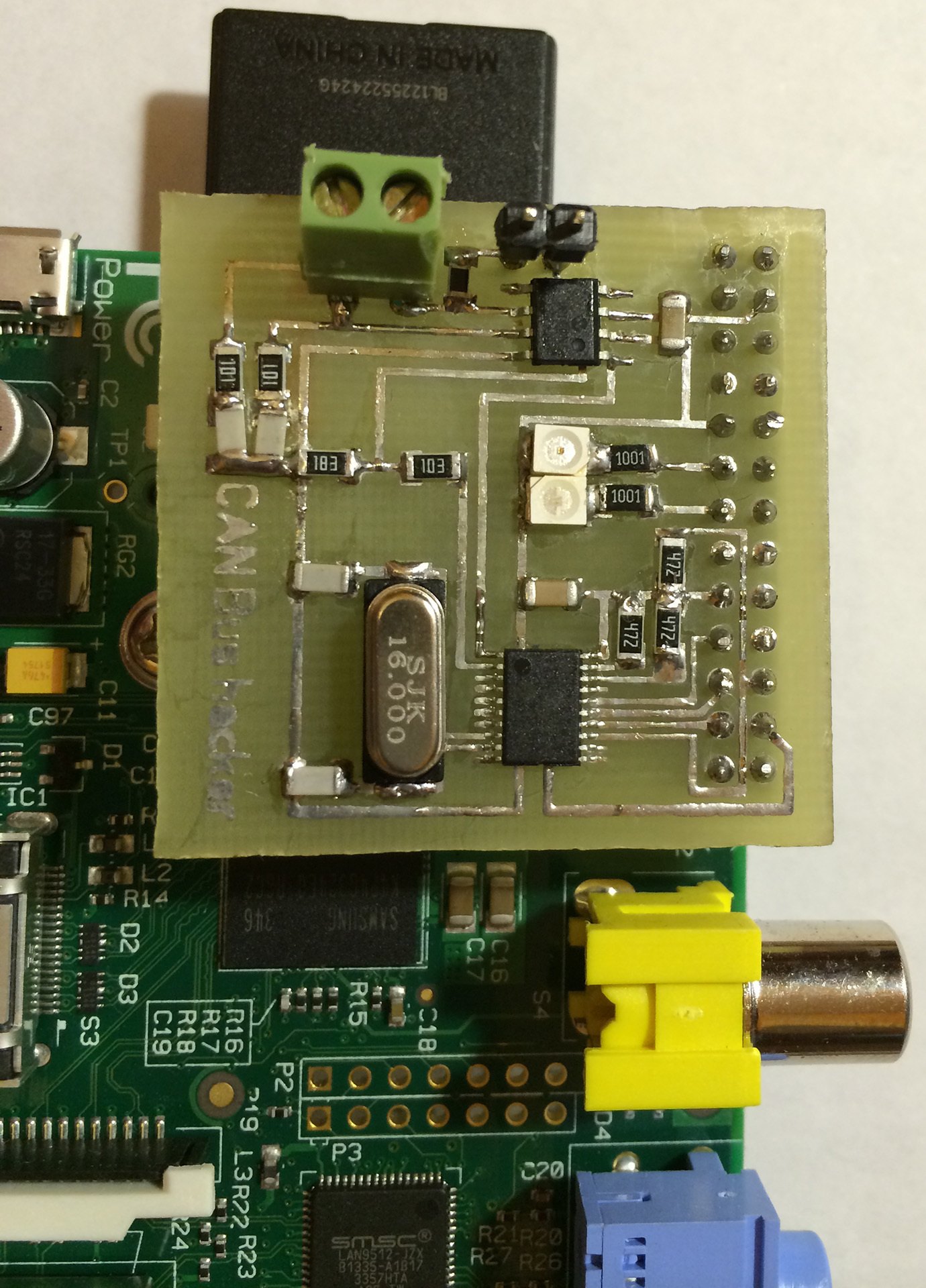

Instalando o software para trabalhar com o barramento CAN
No Raspbian de 2 anos, eu precisava corrigir o bcm2708.c para adicionar suporte ao CAN (talvez isso não seja necessário agora). Para trabalhar com o barramento CAN, você precisa instalar o pacote do utilitário can-utils em github.com/linux-can/can-utils , depois carregar os módulos e aumentar a interface do can:
insmod spi-bcm2708
insmod can
insmod can-dev
insmod can-raw
insmod can-bcm
insmod mcp251x
ip link set can0 type can bitrate 125000 loopback on
ifconfig can0 up
Verificamos que a interface CAN aumentou com o comando ifconfig :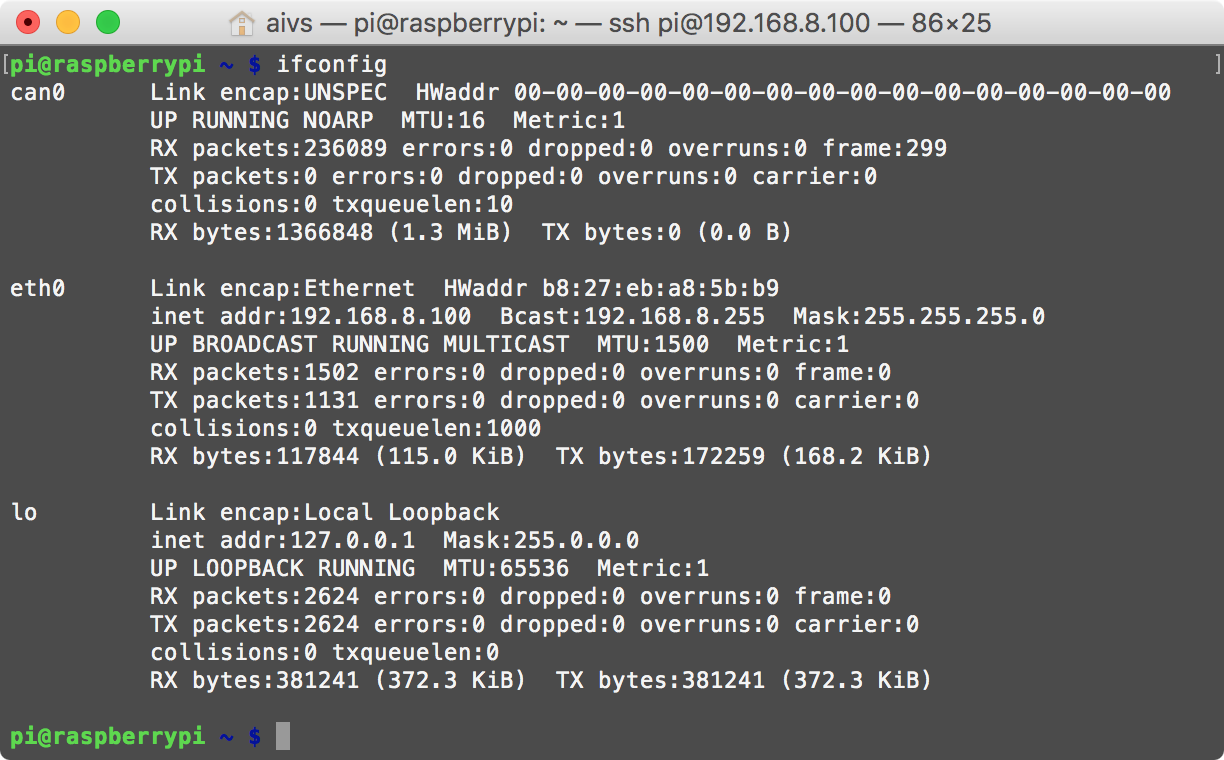 Você pode verificar se tudo funciona enviando e recebendo o comando.Em um terminal, ouvimos:
Você pode verificar se tudo funciona enviando e recebendo o comando.Em um terminal, ouvimos:root@raspberrypi ~
Em outro terminal, enviamos:root@raspberrypi ~
Um processo de instalação mais detalhado é descrito aqui lnxpps.de/rpie .Conexão ao barramento CAN de um carro
Após um pequeno estudo da documentação aberta no barramento VW CAN, descobri que utilizo 2 barramentos.O barramento CAN da unidade de energia , transmitindo dados a uma velocidade de 500 kbit / s, conecta todas as unidades de controle que atendem a esta unidade.Por exemplo, os seguintes dispositivos podem ser conectados ao barramento CAN de uma unidade de energia:- unidade de controle do motor
- Unidade de controle ABS
- unidade de controle de estabilização de percurso,
- unidade de controle da caixa de velocidades,
- unidade de controle do airbag,
- painel de instrumentos.
O barramento CAN do sistema Comfort e o sistema de comando da informação , que permite transferir dados a uma velocidade de 100 kbit / s entre as unidades de controle que atendem a esses sistemas.Por exemplo, osseguintes dispositivos podem ser conectados ao barramento CAN do sistema Comfort e ao sistema de informações <comando :- Unidade de controle Climatronic ou sistema de ar condicionado,
- unidades de controle nas portas do carro,
- Unidade de controle do sistema Comfort,
- unidade de controle com display para sistema de rádio e navegação.
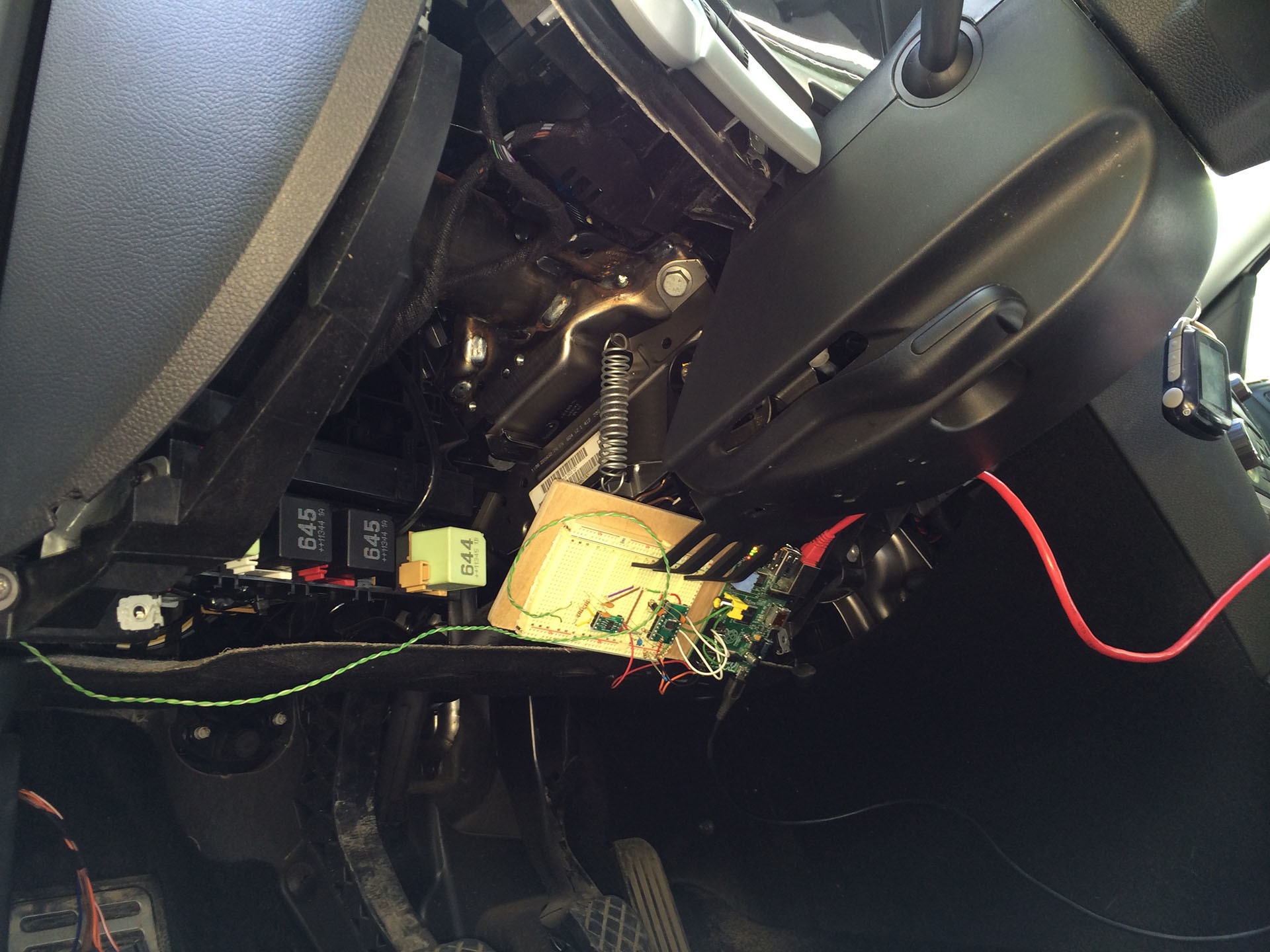
Tendo acesso ao primeiro, você pode controlar o tráfego (na minha versão sobre mecânica, você pode pelo menos controlar o controle de cruzeiro), tendo acesso ao segundo, você pode controlar o rádio, o clima, o travamento central, as janelas elétricas, os faróis, etc.Ambos os ônibus estão conectados através do gateway, localizado na área sob o volante, o conector OBD2 de diagnóstico também está conectado ao gateway. Infelizmente, o tráfego de ambos os barramentos não pode ser ouvido através do conector OBD2, você pode apenas enviar um comando e solicitar um status. Decidi que trabalharia apenas com o ônibus Comfort e o conector na porta do motorista era o local mais conveniente para conectar-se ao ônibus.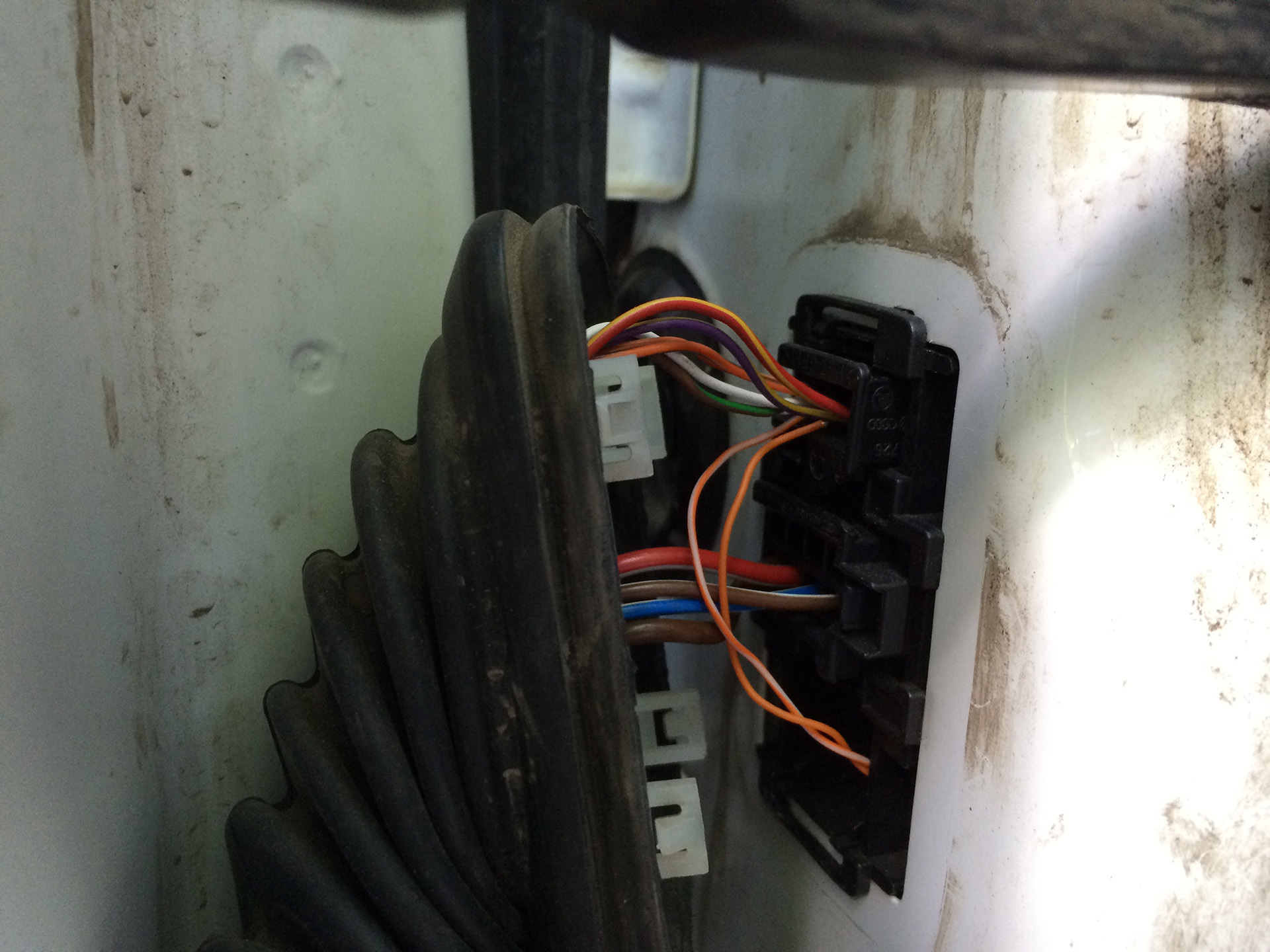 Agora eu posso ouvir tudo o que acontece no Comfort CAN e enviar comandos.
Agora eu posso ouvir tudo o que acontece no Comfort CAN e enviar comandos.Desenvolvimento de um sniffer e estudo do protocolo de barramento CAN
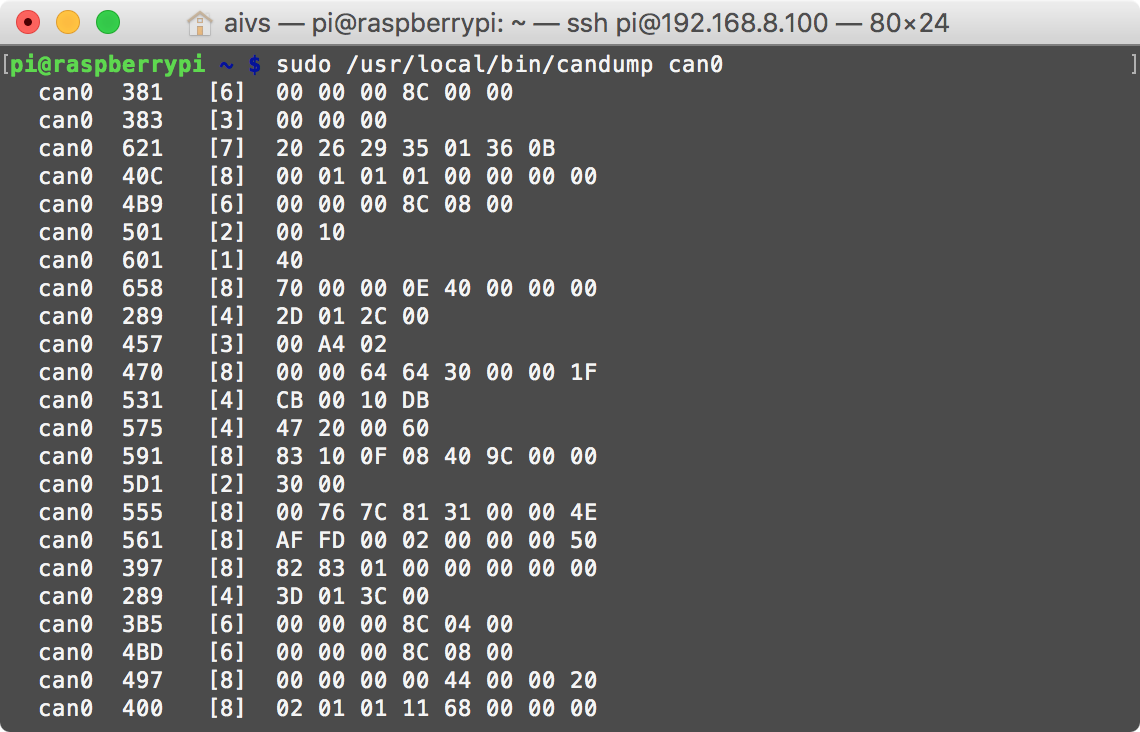 Depois de ter acesso a ouvir o barramento CAN, preciso descriptografar quem passa para quem e o quê. O formato do pacote CAN é mostrado na figura.
Depois de ter acesso a ouvir o barramento CAN, preciso descriptografar quem passa para quem e o quê. O formato do pacote CAN é mostrado na figura.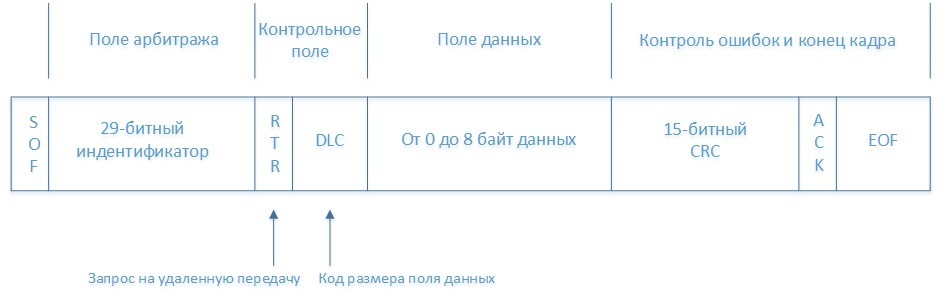 Todos os utilitários do conjunto can-utils podem analisar pacotes CAN e fornecer apenas informações úteis, a saber:
Todos os utilitários do conjunto can-utils podem analisar pacotes CAN e fornecer apenas informações úteis, a saber:- ID
- Comprimento dos dados
- Dados
Os dados são transmitidos de forma não criptografada, facilitando o estudo do protocolo. No Raspberry Pi, escrevi um pequeno servidor que redireciona dados do candump para o TCP / IP para analisar o fluxo de dados no computador e mostrá-lo lindamente.Para o macOS, escrevi um aplicativo simples que, para cada endereço de dispositivo, adiciona uma célula ao tablet e nessa célula já consigo ver quais dados estão sendo alterados. Pressiono o botão da janela de energia, encontrei uma célula na qual os dados mudam e depois determinei quais comandos correspondem a pressionar, pressionar, segurar, segurar.Você pode verificar se o comando funciona enviando-o do terminal, por exemplo, o comando para levantar o vidro esquerdo:
Pressiono o botão da janela de energia, encontrei uma célula na qual os dados mudam e depois determinei quais comandos correspondem a pressionar, pressionar, segurar, segurar.Você pode verificar se o comando funciona enviando-o do terminal, por exemplo, o comando para levantar o vidro esquerdo:cansend can0 181
Equipes que transmitem dispositivos via barramento CAN em carros VAG (Skoda Octavia 2011), recebidas por engenharia reversa:
181#0200
181#0800
181#2000
181#8000
181#0002
181#0008
181#0020
181#0080
291#09AA020000
291#0955040000
291#0900000000
Eu estava com preguiça de estudar todos os outros dispositivos, então nesta lista, apenas o que era interessante para mim.Desenvolvimento de aplicativos para telefone
Usando os comandos recebidos, escrevi um aplicativo para o iPhone que abre / fecha janelas e controla a trava central.No Raspberry Pi, lancei 2 pequenos servidores, o primeiro envia dados do candump para o TCP / IP, o segundo recebe comandos do iPhone e envia para eles.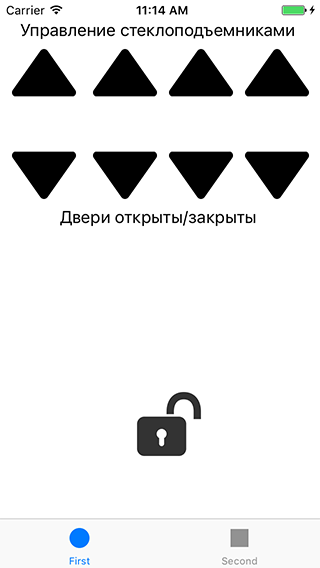
Controle automático de fontes de aplicativos para iOS
#import "FirstViewController.h"
#import "DataConnection.h"
#import "CommandConnection.h"
@interface FirstViewController () <DataConnectionDelegate>
@property (nonatomic, strong) DataConnection *dataConnection;
@property (nonatomic, strong) CommandConnection *commandConnection;
@property (weak, nonatomic) IBOutlet UILabel *Door_1;
@property (weak, nonatomic) IBOutlet UILabel *Door_2;
@property (weak, nonatomic) IBOutlet UILabel *Door_3;
@property (weak, nonatomic) IBOutlet UILabel *Door_4;
@property (weak, nonatomic) IBOutlet UIButton *CentralLock;
- (IBAction)lockUnlock:(UIButton *)sender;
@end
@implementation FirstViewController
- (void)viewDidLoad {
self.dataConnection = [DataConnection new];
self.dataConnection.delegate = self;
[self.dataConnection connectToCanBus];
self.commandConnection = [CommandConnection new];
[self.commandConnection connectToCanBus];
}
- (void)didReceiveMemoryWarning {
[super didReceiveMemoryWarning];
}
- (void)doorStatusChanged:(char)value {
if (value & 1) {
self.Door_1.backgroundColor = [UIColor yellowColor];
self.Door_1.text = @"";
NSLog(@"1");
}
else {
self.Door_1.backgroundColor = [UIColor lightGrayColor];
self.Door_1.text = @"";
}
if (value & 2) {
self.Door_2.backgroundColor = [UIColor yellowColor];
self.Door_2.text = @"";
NSLog(@"2");
}
else {
self.Door_2.backgroundColor = [UIColor lightGrayColor];
self.Door_2.text = @"";
}
if (value & 4) {
self.Door_3.backgroundColor = [UIColor yellowColor];
self.Door_3.text = @"";
NSLog(@"4");
}
else {
self.Door_3.backgroundColor = [UIColor lightGrayColor];
self.Door_3.text = @"";
}
if (value & 8) {
self.Door_4.backgroundColor = [UIColor yellowColor];
self.Door_4.text = @"";
NSLog(@"8");
}
else {
self.Door_4.backgroundColor = [UIColor lightGrayColor];
self.Door_4.text = @"";
}
}
BOOL firstStatusChange = YES;
BOOL lastStatus;
-(void) centralLockStatusChanged:(BOOL)status {
if (firstStatusChange) {
firstStatusChange = NO;
lastStatus = !status;
}
if (!(lastStatus == status)) {
if (status) {
[self.CentralLock setBackgroundImage:[UIImage imageNamed:@"lock_close"] forState:UIControlStateNormal];
}
else {
[self.CentralLock setBackgroundImage:[UIImage imageNamed:@"lock_open"] forState:UIControlStateNormal];
}
lastStatus = status;
}
}
- (IBAction)frontLeftUp:(UIButton *)sender {
[self.commandConnection sendMessage:@"cansend can0 181#0200"];
}
- (IBAction)frontLeftDown:(id)sender {
[self.commandConnection sendMessage:@"cansend can0 181#0800"];
}
- (IBAction)frontRightUp:(UIButton *)sender {
[self.commandConnection sendMessage:@"cansend can0 181#2000"];
}
- (IBAction)frontRightDown:(id)sender {
[self.commandConnection sendMessage:@"cansend can0 181#8000"];
}
- (IBAction)backLeftUp:(UIButton *)sender {
[self.commandConnection sendMessage:@"cansend can0 181#0002"];
}
- (IBAction)backLeftDown:(id)sender {
[self.commandConnection sendMessage:@"cansend can0 181#0008"];
}
- (IBAction)backRightUp:(UIButton *)sender {
[self.commandConnection sendMessage:@"cansend can0 181#0020"];
}
- (IBAction)backtRightDown:(id)sender {
[self.commandConnection sendMessage:@"cansend can0 181#0080"];
}
- (IBAction)lockUnlock:(UIButton *)sender {
if (lastStatus) {
[self.commandConnection sendMessage:@"cansend can0 291#09AA020000"];
int64_t delayInSeconds = 1;
dispatch_time_t popTime = dispatch_time(DISPATCH_TIME_NOW, delayInSeconds * NSEC_PER_SEC);
dispatch_after(popTime, dispatch_get_main_queue(), ^(void){
[self.commandConnection sendMessage:@"cansend can0 291#0900000000"];
});
}
else {
[self.commandConnection sendMessage:@"cansend can0 291#0955040000"];
int64_t delayInSeconds = 1;
dispatch_time_t popTime = dispatch_time(DISPATCH_TIME_NOW, delayInSeconds * NSEC_PER_SEC);
dispatch_after(popTime, dispatch_get_main_queue(), ^(void){
[self.commandConnection sendMessage:@"cansend can0 291#0900000000"];
});
}
}
@end
Existe uma maneira de não escrever seu aplicativo para o telefone, mas para tirar proveito do mundo pronto das residências inteligentes, você só precisa instalar o sistema de automação Z-Way no Raspberry Pi com o comando:wget -q -O - razberry.z-wave.me/install | sudo bash
Depois disso, adicionamos nossos dispositivos CAN ao sistema de automação Z-Way.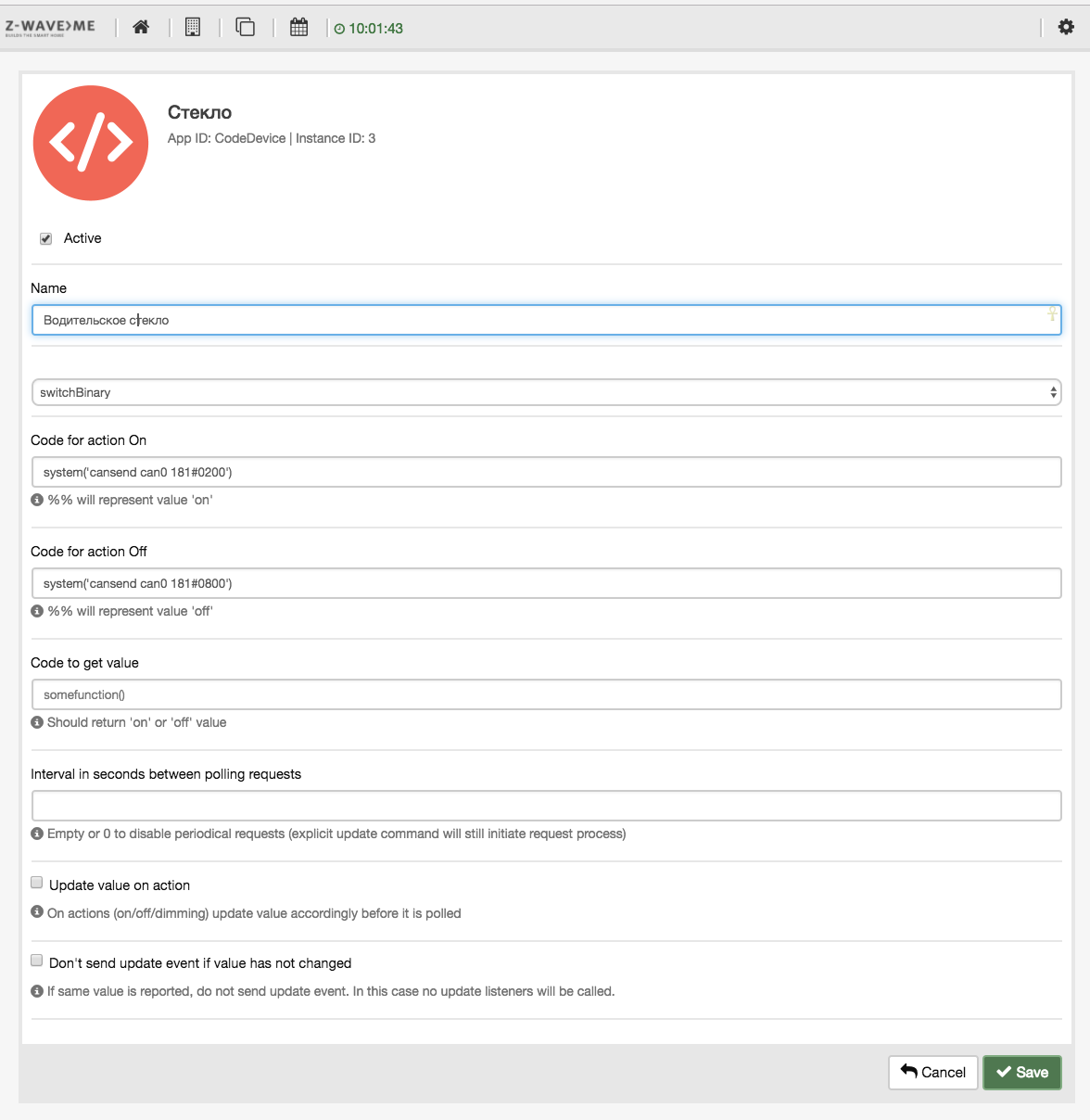 E controlamos o
E controlamos o regulador de janelas como uma chave normal: aplicativos móveis para Z-Way: ZWay Home Control e ZWay Control.
regulador de janelas como uma chave normal: aplicativos móveis para Z-Way: ZWay Home Control e ZWay Control.Controle de voz com Homekit e Siri
Em um dos meus artigos, descrevi o processo de instalação do Homebridge em um Raspberry Pi para controle de voz do sistema de automação residencial Z-Way . Depois de instalar o Homebridge, você poderá fazer o controle de voz com o Siri. Estou certo de que, para o Android, existem muitos aplicativos que permitem que a voz envie solicitações HTTP para controlar o Z-Way.Anexo o vídeo ao controle de voz do regulador da janela.