Multicopter aprendeu a sentar no teto de carros em movimento
 O drone fica no teto de um carro a uma velocidade de 50 km / h.A capacidade dos multicopters de ficar estaticamente no ar os torna uma excelente ferramenta para executar várias tarefas, incluindo videovigilância, entrega de pacotes ou participação em operações de busca e salvamento. Ao mesmo tempo, eles precisam suportar uma autonomia limitada da bateria e um alcance relativamente pequeno. A carga da bateria não é suficiente para chegar ao local, se estiver localizado a muitos quilômetros da base. Os engenheiros do laboratório de sistemas robóticos e autônomos móveis da Escola Politécnica de Montreal (Canadá) propuseram uma solução original para o problema: um drone foi ensinado a se sentar nos telhados dos carros que passavam ao longo de sua rota.movendo-se a velocidades de até 50 km / h. Os carros associados literalmente se transformam em porta-aviões.Se a polícia tem todo o direito de usar veículos civis para suas necessidades, os drones da polícia também podem dotar esses direitos. Pode-se imaginar que, mesmo para drones civis, será introduzido um sistema de "parceria comercial", para que os motoristas paguem uma pequena taxa se um passageiro não tripulado for preso ao teto. A uma taxa por quilômetro. O multicopter reconhecerá carros (por coordenadas GPS e visualmente) e ficará no teto apenas daqueles que participam do programa de afiliados.Na verdade, com a tecnologia atual, o drone simplesmente não será capaz de pousar no teto de carros arbitrários, porque, para mirar, exige uma plataforma de aterrissagem no teto com um código AprilTag especial em preto e branco.
O drone fica no teto de um carro a uma velocidade de 50 km / h.A capacidade dos multicopters de ficar estaticamente no ar os torna uma excelente ferramenta para executar várias tarefas, incluindo videovigilância, entrega de pacotes ou participação em operações de busca e salvamento. Ao mesmo tempo, eles precisam suportar uma autonomia limitada da bateria e um alcance relativamente pequeno. A carga da bateria não é suficiente para chegar ao local, se estiver localizado a muitos quilômetros da base. Os engenheiros do laboratório de sistemas robóticos e autônomos móveis da Escola Politécnica de Montreal (Canadá) propuseram uma solução original para o problema: um drone foi ensinado a se sentar nos telhados dos carros que passavam ao longo de sua rota.movendo-se a velocidades de até 50 km / h. Os carros associados literalmente se transformam em porta-aviões.Se a polícia tem todo o direito de usar veículos civis para suas necessidades, os drones da polícia também podem dotar esses direitos. Pode-se imaginar que, mesmo para drones civis, será introduzido um sistema de "parceria comercial", para que os motoristas paguem uma pequena taxa se um passageiro não tripulado for preso ao teto. A uma taxa por quilômetro. O multicopter reconhecerá carros (por coordenadas GPS e visualmente) e ficará no teto apenas daqueles que participam do programa de afiliados.Na verdade, com a tecnologia atual, o drone simplesmente não será capaz de pousar no teto de carros arbitrários, porque, para mirar, exige uma plataforma de aterrissagem no teto com um código AprilTag especial em preto e branco. O teto de um carro comum não é muito adequado para o equipamento desse local. Os desenvolvedores do sistema acreditam que o transporte público (ônibus), caminhões de correio e serviços de entrega são adequados como transportadoras. Esses carros estão viajando ativamente pela cidade; portanto, para um drone, não será um problema "de graça" pular uma dúzia de quilômetros até o destino.Em teoria, é possível equipar os telhados dos carros com esses locais de aterrissagem. Durante os vôos de teste, os pesquisadores mostraram que mesmo uma área relativamente pequena no "carro de passageiro" é suficiente para o pouso.
O teto de um carro comum não é muito adequado para o equipamento desse local. Os desenvolvedores do sistema acreditam que o transporte público (ônibus), caminhões de correio e serviços de entrega são adequados como transportadoras. Esses carros estão viajando ativamente pela cidade; portanto, para um drone, não será um problema "de graça" pular uma dúzia de quilômetros até o destino.Em teoria, é possível equipar os telhados dos carros com esses locais de aterrissagem. Durante os vôos de teste, os pesquisadores mostraram que mesmo uma área relativamente pequena no "carro de passageiro" é suficiente para o pouso. O drone fica no teto de um carro de passageiro a uma velocidade de 40 km / h.Umavantagem desse método de movimento é que o drone no teto pode carregar suas baterias. Assim, dois problemas existentes no UAV são resolvidos ao mesmo tempo - energia da bateria insuficiente e curto alcance.O sistema de pouso não tripulado desenvolvido por engenheiros canadenses usa as coordenadas GPS de um telefone celular para procurar um veículo e, durante o pouso, não requer coordenação de manobras entre o UAV e o carro. Ou seja, nenhuma assistência é necessária do motorista, exceto para a instalação de uma plataforma de pouso no teto com um marcador visual e um telefone celular. Teoricamente, o motorista durante a viagem pode nem perceber que alguém usou seu carro na estrada.O elemento chave ao pousar o drone no teto do carro são os marcadores visuais em preto e branco da AprilTag , que foram recentemente usados cada vez mais na robótica. Desenvolvidos por Olson em 2011, esses marcadores desempenham o papel de identificação visual e posicionamento 3D preciso do objeto em relação à câmera.
O drone fica no teto de um carro de passageiro a uma velocidade de 40 km / h.Umavantagem desse método de movimento é que o drone no teto pode carregar suas baterias. Assim, dois problemas existentes no UAV são resolvidos ao mesmo tempo - energia da bateria insuficiente e curto alcance.O sistema de pouso não tripulado desenvolvido por engenheiros canadenses usa as coordenadas GPS de um telefone celular para procurar um veículo e, durante o pouso, não requer coordenação de manobras entre o UAV e o carro. Ou seja, nenhuma assistência é necessária do motorista, exceto para a instalação de uma plataforma de pouso no teto com um marcador visual e um telefone celular. Teoricamente, o motorista durante a viagem pode nem perceber que alguém usou seu carro na estrada.O elemento chave ao pousar o drone no teto do carro são os marcadores visuais em preto e branco da AprilTag , que foram recentemente usados cada vez mais na robótica. Desenvolvidos por Olson em 2011, esses marcadores desempenham o papel de identificação visual e posicionamento 3D preciso do objeto em relação à câmera. Para apontar o drone e coordenar com a plataforma em seis graus de liberdade, é usado um marcador de 30 × 30 cm. Como informação auxiliar, é suficiente uma estimativa aproximada das coordenadas e velocidade do veículo, proveniente dos módulos GPS e IMU (Unidade de Medição Inercial) do telefone móvel.O quadrocóptero está equipado com um sistema de navegação inercial (INS), uma câmera cardan de três eixos (com uma IMU separada) para rastrear o alvo e uma câmera fixa grande angular para baixo que rastreia o marcador AprilTag a curta distância nos últimos segundos da manobra. Os desenvolvedores observam que, na fase de aproximação do veículo, o UAV também pode usar o sensor de velocidade, que é colocado em muitos quadrocopters modernos. Esses sensores calculam a velocidade a partir de uma sequência de molduras.
Para apontar o drone e coordenar com a plataforma em seis graus de liberdade, é usado um marcador de 30 × 30 cm. Como informação auxiliar, é suficiente uma estimativa aproximada das coordenadas e velocidade do veículo, proveniente dos módulos GPS e IMU (Unidade de Medição Inercial) do telefone móvel.O quadrocóptero está equipado com um sistema de navegação inercial (INS), uma câmera cardan de três eixos (com uma IMU separada) para rastrear o alvo e uma câmera fixa grande angular para baixo que rastreia o marcador AprilTag a curta distância nos últimos segundos da manobra. Os desenvolvedores observam que, na fase de aproximação do veículo, o UAV também pode usar o sensor de velocidade, que é colocado em muitos quadrocopters modernos. Esses sensores calculam a velocidade a partir de uma sequência de molduras. As estimativas de localização, velocidade e aceleração relativas são calculadas no computador de bordo usando o filtro Kalmana uma frequência de 100 Hz. Este é um filtro recursivo eficaz que avalia o vetor de estado de um sistema dinâmico usando uma série de medições incompletas e com ruído.
As estimativas de localização, velocidade e aceleração relativas são calculadas no computador de bordo usando o filtro Kalmana uma frequência de 100 Hz. Este é um filtro recursivo eficaz que avalia o vetor de estado de um sistema dinâmico usando uma série de medições incompletas e com ruído. Experiências demonstraram que o multicopter pousa com sucesso em carros a velocidades de até 50 km / h. Com o aumento da velocidade, o risco de ficar parado da borda da plataforma aumenta. Talvez esse problema possa ser resolvido aumentando a velocidade do processamento de informações das câmeras zangão.
Experiências demonstraram que o multicopter pousa com sucesso em carros a velocidades de até 50 km / h. Com o aumento da velocidade, o risco de ficar parado da borda da plataforma aumenta. Talvez esse problema possa ser resolvido aumentando a velocidade do processamento de informações das câmeras zangão.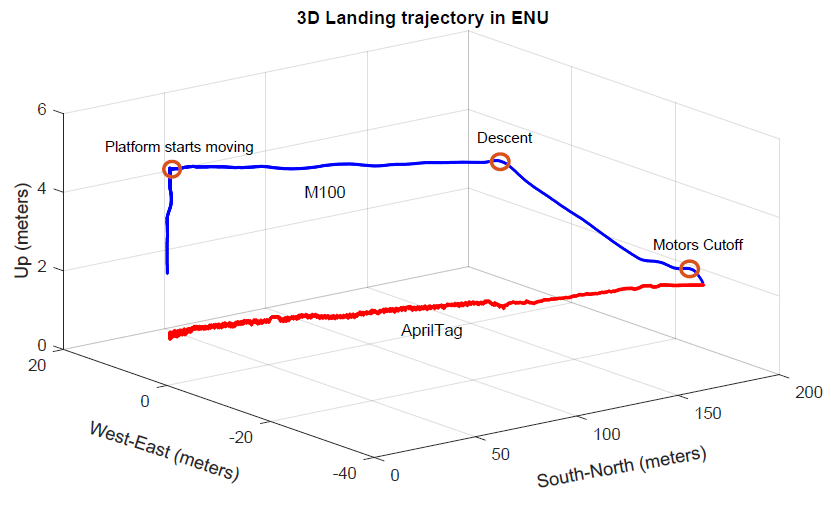 Trajetória de pouso a uma velocidade de 50 km / h Oartigo científico foi preparado para o Congresso Mundial da IFAC 2017 e publicado em 22 de novembro de 2016 em arXiv.org (arXiv: 1611.07329).
Trajetória de pouso a uma velocidade de 50 km / h Oartigo científico foi preparado para o Congresso Mundial da IFAC 2017 e publicado em 22 de novembro de 2016 em arXiv.org (arXiv: 1611.07329).Source: https://habr.com/ru/post/pt399463/
All Articles