Como nos preparamos para o UAV Challenge 2016
 O avião quádruplo de Murena durante os vôos de teste doUAV Challenge é um evento anual destinado a expandir as capacidades do UAVe, em conjunto, uma das competições robóticas mais ambiciosas do mundo. O impacto do evento na indústria é bastante grande: em 2014, por exemplo, colaboradores regulares de projetos populares como Ardupilot, PX4 e Paparazzi participaram do UAV Challenge, muitas das características desses controladores de vôo existentes hoje em dia foram formadas precisamente sob a influência dos requisitos dessas competições. A cada dois anos, a competição é aberta a equipes de todo o mundo e, ao mesmo tempo, a missão de salvar uma pessoa se torna o tema. Este ano, também conseguimos entrar na lista das dez equipes que passaram nas três etapas preliminares do UAV Challenge e foram para os eventos da parte final, que aconteceu de 27 a 29 de setembro em Dalby, na Austrália. O desafio terminou há dois meses. Desde então, nossas impressões se acalmaram,analisamos a experiência e agora estamos prontos para descrever as duas aeronaves com as quais chegamos ao evento.Somos o MelAvio Avionics Club, uma associação de estudantes da Universidade de Tecnologia de Varsóvia. Lidamos com programação, eletrônica e mecânica como parte de sua aplicação a drones, e quase todo o nosso trabalho se prepara para várias competições, a principal das quais recentemente foi o UAV Challenge. De fato, este ano, MelAvio participou do desafio pela segunda vez: antes disso, dois anos atrás, nossa equipe já havia chegado à final na Austrália. Em seguida, conseguimos nos mostrar bem com o projeto mecânico original e um controlador de vôo caseiro, ocupando o décimo lugar na classificação geral e recebendo um prêmio por habilidades de voo, embora não cumprindo totalmente a missão da competição.
O avião quádruplo de Murena durante os vôos de teste doUAV Challenge é um evento anual destinado a expandir as capacidades do UAVe, em conjunto, uma das competições robóticas mais ambiciosas do mundo. O impacto do evento na indústria é bastante grande: em 2014, por exemplo, colaboradores regulares de projetos populares como Ardupilot, PX4 e Paparazzi participaram do UAV Challenge, muitas das características desses controladores de vôo existentes hoje em dia foram formadas precisamente sob a influência dos requisitos dessas competições. A cada dois anos, a competição é aberta a equipes de todo o mundo e, ao mesmo tempo, a missão de salvar uma pessoa se torna o tema. Este ano, também conseguimos entrar na lista das dez equipes que passaram nas três etapas preliminares do UAV Challenge e foram para os eventos da parte final, que aconteceu de 27 a 29 de setembro em Dalby, na Austrália. O desafio terminou há dois meses. Desde então, nossas impressões se acalmaram,analisamos a experiência e agora estamos prontos para descrever as duas aeronaves com as quais chegamos ao evento.Somos o MelAvio Avionics Club, uma associação de estudantes da Universidade de Tecnologia de Varsóvia. Lidamos com programação, eletrônica e mecânica como parte de sua aplicação a drones, e quase todo o nosso trabalho se prepara para várias competições, a principal das quais recentemente foi o UAV Challenge. De fato, este ano, MelAvio participou do desafio pela segunda vez: antes disso, dois anos atrás, nossa equipe já havia chegado à final na Austrália. Em seguida, conseguimos nos mostrar bem com o projeto mecânico original e um controlador de vôo caseiro, ocupando o décimo lugar na classificação geral e recebendo um prêmio por habilidades de voo, embora não cumprindo totalmente a missão da competição. Barracuda, drone MelAvio, no UAV Challenge Outback Rescue 2014Este ano, mudamos um pouco a abordagem da participação e usamos um controlador de vôo pronto (Ardupilot no Pixhawk), finalizando-o de acordo com nossas necessidades. Isso se deve ao fato de que as condições do desafio se tornaram mais complicadas em comparação com a última vez, e o desenvolvimento independente de uma solução que atenda a todas as condições é uma tarefa muito ambiciosa, era mais lógico usar os projetos de código aberto existentes.
Barracuda, drone MelAvio, no UAV Challenge Outback Rescue 2014Este ano, mudamos um pouco a abordagem da participação e usamos um controlador de vôo pronto (Ardupilot no Pixhawk), finalizando-o de acordo com nossas necessidades. Isso se deve ao fato de que as condições do desafio se tornaram mais complicadas em comparação com a última vez, e o desenvolvimento independente de uma solução que atenda a todas as condições é uma tarefa muito ambiciosa, era mais lógico usar os projetos de código aberto existentes.Desafio Desafio
Para deixar claro o escopo da tarefa, faz sentido descrever brevemente a missão apresentada para a competição. A tarefa das equipes era entregar uma amostra de sangue de Joe, um morador do interior, que, segundo a lenda, de repente se sentiu mal ao encontrar em sua casa fora da cidade. A casa de Joe é isolada da cidade por inundações; portanto, para alcançá-la e voar de volta, a aeronave deve superar completamente até cinquenta e um quilômetros de espaço aéreo por um caminho indireto. Além disso, a posição de Joe é conhecida apenas por uma precisão de cem metros e, para fechar o terreno e evitar ferir a pessoa, a aeronave deve localizá-la com mais precisão já existente. Para complicar também a situação, o fato de quase não haver garantias sobre a paisagem, tanto no início da missão quanto nas proximidades de Joe,para que o drone tenha a capacidade de decolar ou pousar na vertical ou na vertical, além de um sistema que permita, com um grau de confiabilidade suficiente, selecionar um local adequado para o pouso. Os organizadores do desafio incentivam o comportamento autônomo do drone, tanto quanto possível, então a melhor abordagem possível é eliminar completamente as ações do piloto das missões, desde a partida do local de lançamento até o pouso com uma amostra de sangue no mesmo local. Além do drone principal de "entrega", uma aeronave auxiliar pode participar da missão. Ambos os dispositivos têm uma ampla gama de requisitos para garantir seu voo seguro e comportamento correto em situações imprevistas.bem como um sistema que permite com um grau de confiabilidade suficiente escolher um local adequado para o pouso. Os organizadores do desafio incentivam o comportamento autônomo do drone, tanto quanto possível, então a melhor abordagem possível é eliminar completamente as ações do piloto das missões, desde a partida do local de lançamento até o pouso com uma amostra de sangue no mesmo local. Além do drone principal de "entrega", uma aeronave auxiliar pode participar da missão. Ambos os dispositivos têm uma ampla gama de requisitos para garantir seu voo seguro e comportamento correto em situações imprevistas.bem como um sistema que permite com um grau de confiabilidade suficiente escolher um local adequado para o pouso. Os organizadores do desafio incentivam o comportamento autônomo do drone, tanto quanto possível, então a melhor abordagem possível é eliminar completamente as ações do piloto das missões, desde a partida do local de lançamento até o pouso com uma amostra de sangue no mesmo local. Além do drone principal de "entrega", uma aeronave auxiliar pode participar da missão. Ambos os dispositivos têm uma ampla gama de requisitos para garantir seu voo seguro e comportamento correto em situações imprevistas.portanto, a melhor abordagem possível é eliminar completamente as ações do piloto das missões, desde a partida do local de lançamento até o pouso com uma amostra de sangue no mesmo local. Além do drone principal de "entrega", uma aeronave auxiliar pode participar da missão. Ambos os dispositivos têm uma ampla gama de requisitos para garantir seu voo seguro e comportamento correto em situações imprevistas.portanto, a melhor abordagem possível é eliminar completamente as ações do piloto das missões, desde a partida do local de lançamento até o pouso com uma amostra de sangue no mesmo local. Além do drone principal de "entrega", uma aeronave auxiliar pode participar da missão. Ambos os dispositivos têm uma ampla gama de requisitos para garantir seu voo seguro e comportamento correto em situações imprevistas.Ambos os dispositivos têm uma ampla gama de requisitos para garantir seu voo seguro e comportamento correto em situações imprevistas.Ambos os dispositivos têm uma ampla gama de requisitos para garantir seu voo seguro e comportamento correto em situações imprevistas. ,Como o principal drone da missão, decidimos usar um avião quad - uma combinação de um quadrocóptero e uma aeronave de layout clássico. A necessidade de decolar e pousar verticalmente removeu imediatamente de nossa atenção os esquemas padrão de asa fixa, de modo que as principais alternativas à opção escolhida eram um tiltrotor e um helicóptero. A versão com um avião de conversão foi rejeitada devido ao fato de que, com um passo fixo da hélice, os motores do avião de conversão estão condenados à baixa eficiência, o que era inaceitável para nós devido à faixa requerida; a construção de um tiltrotor com um suporte de passo variável implicava um grau de complexidade mecânica, que nós, como organização científica estudantil, não conseguimos lidar devido a recursos limitados.Para a opção de helicóptero, também esperávamos encontrar dificuldades com a mecânica, mas elas não pareciam muito deprimentes e recusamos essa opção em grande parte porque o quadriciclo parecia uma plataforma mais original e interessante.
,Como o principal drone da missão, decidimos usar um avião quad - uma combinação de um quadrocóptero e uma aeronave de layout clássico. A necessidade de decolar e pousar verticalmente removeu imediatamente de nossa atenção os esquemas padrão de asa fixa, de modo que as principais alternativas à opção escolhida eram um tiltrotor e um helicóptero. A versão com um avião de conversão foi rejeitada devido ao fato de que, com um passo fixo da hélice, os motores do avião de conversão estão condenados à baixa eficiência, o que era inaceitável para nós devido à faixa requerida; a construção de um tiltrotor com um suporte de passo variável implicava um grau de complexidade mecânica, que nós, como organização científica estudantil, não conseguimos lidar devido a recursos limitados.Para a opção de helicóptero, também esperávamos encontrar dificuldades com a mecânica, mas elas não pareciam muito deprimentes e recusamos essa opção em grande parte porque o quadriciclo parecia uma plataforma mais original e interessante.Construção civil
Antes de projetar o modelo "sério" do quadrilátero, montamos um modelo de teste - um aparelho que chamamos de "Anormal". Esse híbrido foi feito com base em um modelo de avião adquirido pronto para uso e foi projetado para testar a operacionalidade da própria idéia de um avião quad, bem como todas as inovações que adaptamos no controlador de vôo. Depois de termos certeza de que poderíamos realmente voar em uma configuração de drone, começamos a desenvolver um modelo maior. Avião de testeDesde o início do desenvolvimento, ficou claro que as hélices e motores do helicóptero criariam resistência e desequilíbrio adicionais no modo avião, por isso decidimos tentar tornar o design do próprio avião o mais "freado" possível e o mais estável possível. Além disso, nosso requisito inicial era preservar o espaço máximo no corpo da aeronave, de modo a equipar equipamentos de sistema de visão por computador e baterias de polímero de lítio com capacidade suficiente para cumprir uma missão inteira (a aeronave é totalmente elétrica). Com base nessas considerações, escolhemos um plano de asa alta com uma asa trapezoidal de alongamento médio e uma cauda em T; o ângulo da asa transversal V foi escolhido igual a um grau e meio.Com os dados iniciais indicados sobre o projeto e a suposição da massa da aeronave, iniciamos o desenvolvimento. Primeiro, com a ajuda do aplicativo Profili 2.0, uma opção de perfil adequada para a asa principal da aeronave foi selecionada, após o que no XFLR5 especificamos o formato da asa e a plumagem em volume. Além disso, na ANSYS Fluent, verificamos que os motores e hélices de helicópteros localizados nas imediações da asa não fazem uma mudança crítica na natureza do fluxo de ar na asa. Para executar esses procedimentos, procedemos a um estudo mais detalhado de toda a estrutura no SOLIDWORKS.
Avião de testeDesde o início do desenvolvimento, ficou claro que as hélices e motores do helicóptero criariam resistência e desequilíbrio adicionais no modo avião, por isso decidimos tentar tornar o design do próprio avião o mais "freado" possível e o mais estável possível. Além disso, nosso requisito inicial era preservar o espaço máximo no corpo da aeronave, de modo a equipar equipamentos de sistema de visão por computador e baterias de polímero de lítio com capacidade suficiente para cumprir uma missão inteira (a aeronave é totalmente elétrica). Com base nessas considerações, escolhemos um plano de asa alta com uma asa trapezoidal de alongamento médio e uma cauda em T; o ângulo da asa transversal V foi escolhido igual a um grau e meio.Com os dados iniciais indicados sobre o projeto e a suposição da massa da aeronave, iniciamos o desenvolvimento. Primeiro, com a ajuda do aplicativo Profili 2.0, uma opção de perfil adequada para a asa principal da aeronave foi selecionada, após o que no XFLR5 especificamos o formato da asa e a plumagem em volume. Além disso, na ANSYS Fluent, verificamos que os motores e hélices de helicópteros localizados nas imediações da asa não fazem uma mudança crítica na natureza do fluxo de ar na asa. Para executar esses procedimentos, procedemos a um estudo mais detalhado de toda a estrutura no SOLIDWORKS.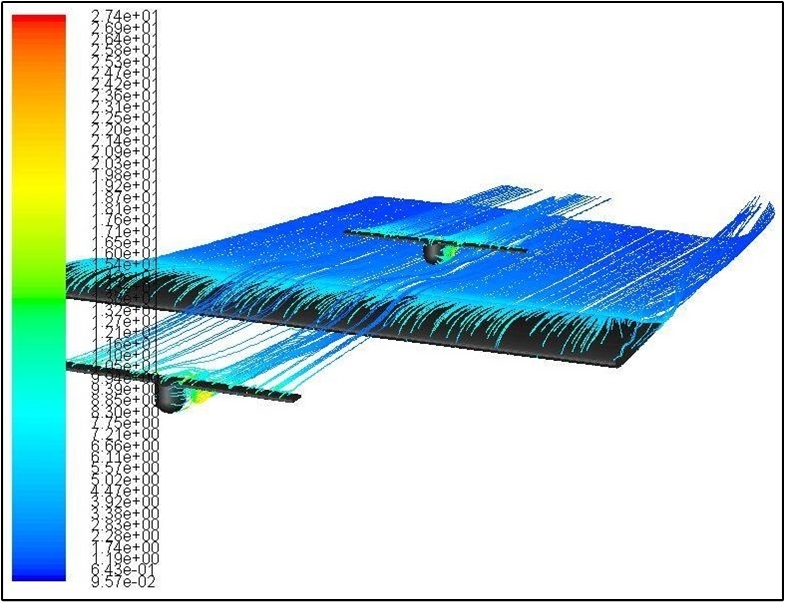 Teste de fluxo de hélice de aeronave no ANSYS FluentAo trabalhar na estrutura, atenção especial teve que ser dada ao corpo e à asa da aeronave, pois eles têm o número máximo de peças e têm o maior impacto na capacidade de carga e na dinâmica da aeronave. Uma abordagem especial para esses elementos foi necessária não apenas durante o desenvolvimento, mas também durante a montagem, pois era necessário torná-los o mais leve possível, mantendo a força suficiente.A asa da aeronave era composta por três componentes: a seção central e os consoles direito e esquerdo. A base para a construção da asa foi a espuma de poliestireno extrudido. Partes da asa foram projetadas para que sua superfície fosse reta e, graças a isso, uma máquina de arame CNC poderia ser usada para cortar com precisão o poliéster. Depois disso, o poliéster pré-fabricado foi submetido a processamento adicional para aumentar sua resistência e melhorar o desempenho aerodinâmico. Assim, o branco da seção central foi laminado com fibra de carbono e resina de poliéster; Para manter a peça lisa e homogênea, durante o período de laminação, foi envolvida com plexiglass, colocada em um saco a vácuo e fixada em espuma de poliestireno negativa.Não foi possível usar fibra de carbono para a fabricação de consoles de asa, inclusive pelo motivo de ser necessário colocar equipamentos de transmissão de rádio nessas partes (o carvão cria interferência); portanto, os consoles foram laminados com uma camada de fibra de vidro e uma camada de balsa. As fixações foram feitas nas bordas dos elementos para sua montagem em uma única estrutura de asa. Além disso, foi cortado um espaço na asa para a colocação de um transceptor de rádio, unidades para ailerons, fios e outros equipamentos; nos locais necessários, os recortes impressos em uma impressora 3D foram anexados aos recortes do equipamento.As fixações foram feitas nas bordas dos elementos para sua montagem em uma única estrutura de asa. Além disso, foi cortado um espaço na asa para a colocação de um transceptor de rádio, unidades para ailerons, fios e outros equipamentos; nos locais necessários, os recortes impressos em uma impressora 3D foram anexados aos recortes do equipamento.As fixações foram feitas nas bordas dos elementos para sua montagem em uma única estrutura de asa. Além disso, foi cortado um espaço na asa para a colocação de um transceptor de rádio, unidades para ailerons, fios e outros equipamentos; nos locais necessários, os recortes impressos em uma impressora 3D foram anexados aos recortes do equipamento.Em locais onde os consoles de asa estão conectados à asa central, também foram fornecidas fixações para vigas longitudinais, nas extremidades das quais existem motores de helicóptero. Os acessórios dos consoles de asa, vigas de helicóptero e plumagem foram impressos com nylon usando a tecnologia SLS com maior precisão. As montagens dos motores de helicóptero foram cortadas a laser de madeira compensada e coladas com resina de poliéster.
Teste de fluxo de hélice de aeronave no ANSYS FluentAo trabalhar na estrutura, atenção especial teve que ser dada ao corpo e à asa da aeronave, pois eles têm o número máximo de peças e têm o maior impacto na capacidade de carga e na dinâmica da aeronave. Uma abordagem especial para esses elementos foi necessária não apenas durante o desenvolvimento, mas também durante a montagem, pois era necessário torná-los o mais leve possível, mantendo a força suficiente.A asa da aeronave era composta por três componentes: a seção central e os consoles direito e esquerdo. A base para a construção da asa foi a espuma de poliestireno extrudido. Partes da asa foram projetadas para que sua superfície fosse reta e, graças a isso, uma máquina de arame CNC poderia ser usada para cortar com precisão o poliéster. Depois disso, o poliéster pré-fabricado foi submetido a processamento adicional para aumentar sua resistência e melhorar o desempenho aerodinâmico. Assim, o branco da seção central foi laminado com fibra de carbono e resina de poliéster; Para manter a peça lisa e homogênea, durante o período de laminação, foi envolvida com plexiglass, colocada em um saco a vácuo e fixada em espuma de poliestireno negativa.Não foi possível usar fibra de carbono para a fabricação de consoles de asa, inclusive pelo motivo de ser necessário colocar equipamentos de transmissão de rádio nessas partes (o carvão cria interferência); portanto, os consoles foram laminados com uma camada de fibra de vidro e uma camada de balsa. As fixações foram feitas nas bordas dos elementos para sua montagem em uma única estrutura de asa. Além disso, foi cortado um espaço na asa para a colocação de um transceptor de rádio, unidades para ailerons, fios e outros equipamentos; nos locais necessários, os recortes impressos em uma impressora 3D foram anexados aos recortes do equipamento.As fixações foram feitas nas bordas dos elementos para sua montagem em uma única estrutura de asa. Além disso, foi cortado um espaço na asa para a colocação de um transceptor de rádio, unidades para ailerons, fios e outros equipamentos; nos locais necessários, os recortes impressos em uma impressora 3D foram anexados aos recortes do equipamento.As fixações foram feitas nas bordas dos elementos para sua montagem em uma única estrutura de asa. Além disso, foi cortado um espaço na asa para a colocação de um transceptor de rádio, unidades para ailerons, fios e outros equipamentos; nos locais necessários, os recortes impressos em uma impressora 3D foram anexados aos recortes do equipamento.Em locais onde os consoles de asa estão conectados à asa central, também foram fornecidas fixações para vigas longitudinais, nas extremidades das quais existem motores de helicóptero. Os acessórios dos consoles de asa, vigas de helicóptero e plumagem foram impressos com nylon usando a tecnologia SLS com maior precisão. As montagens dos motores de helicóptero foram cortadas a laser de madeira compensada e coladas com resina de poliéster. Seção central no processo de fabricaçãoA estrutura do estojo também era feita de compensado. As peças necessárias foram cortadas de madeira compensada com um laser e coladas em uma única estrutura usando cola de cianoacrilato. A moldura foi colada com balsa, reforçada no nariz e dobrada com fibra de carbono e depois laminada com fibra de vidro. O design forneceu espaço para uma câmera com um estabilizador (frente do casco), baterias (parte traseira do casco), além de um computador de bordo e um controlador de vôo (meio do casco). Além disso, foram desenvolvidas conexões para a lança de asa e cauda, o que tornou possível posicionar convenientemente os fios de potência e sinal dentro da estrutura da aeronave.O estabilizador e o elevador foram feitos pelo método semelhante à fabricação de uma asa de avião.
Seção central no processo de fabricaçãoA estrutura do estojo também era feita de compensado. As peças necessárias foram cortadas de madeira compensada com um laser e coladas em uma única estrutura usando cola de cianoacrilato. A moldura foi colada com balsa, reforçada no nariz e dobrada com fibra de carbono e depois laminada com fibra de vidro. O design forneceu espaço para uma câmera com um estabilizador (frente do casco), baterias (parte traseira do casco), além de um computador de bordo e um controlador de vôo (meio do casco). Além disso, foram desenvolvidas conexões para a lança de asa e cauda, o que tornou possível posicionar convenientemente os fios de potência e sinal dentro da estrutura da aeronave.O estabilizador e o elevador foram feitos pelo método semelhante à fabricação de uma asa de avião.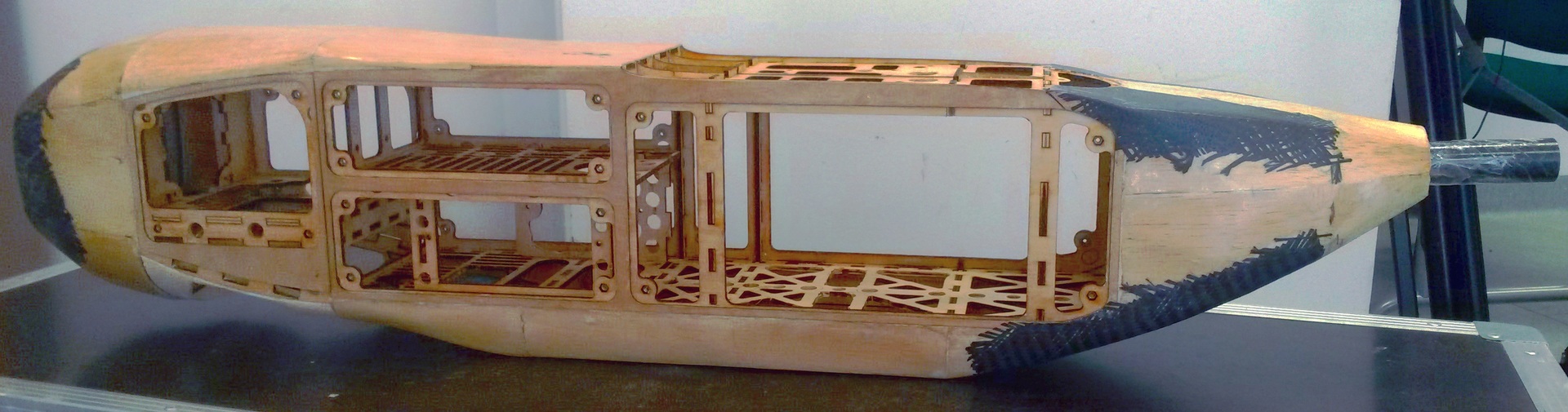 Quadro de UAV
Quadro de UAVParte do poder
Como motores de helicóptero para o dispositivo, levamos os maiores para nós na área de acesso operacional - o T-MOTOR U8 Pro 170KV com as hélices de madeira de 20 polegadas de diâmetro recomendadas pela T-MOTOR para esses motores. A ESC'i T-MOTOR FLAME 80A foi selecionada para controlar a velocidade dos motores. Alimentada por duas baterias de polímero de lítio e seis células Tattu 22000mah conectadas em série, essa usina nos permitiu obter uma tração vertical máxima de 20 kg.Para propulsão, escolhemos o motor Scorpion HKIII 4035 500KV com o ESC FOXY XR-120 OPTO alimentado pela mesma bateria à qual os motores de helicóptero estão conectados.O peso final de decolagem da aeronave com todo o equipamento a bordo foi igual a 14 kg. A velocidade máxima da aeronave é de 40 m / s, a velocidade de cruzeiro é de 25 m / s, a velocidade de estol de fluxo é de 18 m / s, a duração do voo no modo avião é de mais de uma hora, o alcance do vôo é de até 100 km, o que deveria nos permitir executar missões mesmo em condições climáticas adversas.Sistema de visão computacional
Uma parte importante da aeronave principal para nós era o sistema de visão computacional a bordo, sem o qual é impossível encontrar Joe e concluir a missão. Os principais elementos do sistema foram a câmera JAI GO 2400 RGB com transferência de quadro completo e resolução Full HD e o poderoso minicomputador GIGABYTE BXi7-5775. A câmera foi montada em uma suspensão estabilizadora de nosso projeto mecânico original, sob o controle do controlador Alexmos - isso nos permitiu obter imagens com um nível constante de inclinação em relação ao solo, para que a silhueta de uma pessoa nelas fosse claramente distinguível. O computador foi conectado ao controlador de vôo para fornecer dados e comandos de telemetria. Além disso, usando um modem 4G, o computador recebeu acesso ao servidor FTP,através do qual foi feita a comunicação com a estação do operador do sistema de visão computacional. O algoritmo do programa que lançamos a bordo é brevemente descrito no próximo parágrafo.Depois de receber a imagem da câmera, o último pacote de dados de telemetria recebido do controlador de vôo é imediatamente anexado a ela; portanto, para cada pixel da imagem é possível calcular aproximadamente suas coordenadas geográficas. Depois disso, são pesquisadas áreas de interesse: para isso, é construído um histograma de imagem e são selecionados níveis, o número de pixels cujo valor é maior que um determinado valor limite - esses são os níveis das regiões "desinteressantes" e os pixels correspondentes não são considerados mais. Os pixels "interessantes" restantes passam por uma operação de erosão morfológica, de modo que apenas os pixels combinados permanecem em grupos - esses grupos são classificados por concentração, tamanho e cor e, como resultado, obtemos um grupo classificado de áreas na imagem que podem pelo menos parecer semelhantes por pessoa.Depois disso, para cada uma dessas áreas, calculamosO descritor HOG e, usando o vetor de vetores de suporte, o classificamos como pessoa ou não. Se uma região é classificada como pessoa, isso não significa que a consideremos imediatamente como tal - ela simplesmente recebe uma vantagem significativa no ranking. Depois, as imagens de todas as áreas de interesse encontradas são enviadas para o servidor FTP na ordem correspondente à sua classificação. O arquivo de cada imagem inclui informações sobre a localização geográfica da região e o identificador da imagem completa da qual a região é retirada.O aplicativo na estação do operador permite visualizar imagens de áreas de interesse carregadas pela máquina em um servidor FTP, juntamente com um mapa da área sobre a qual o dispositivo está voando e classificá-las por classificação e tempo. Se uma determinada área de interesse faz com que o operador suspeite, ele, novamente através de um servidor FTP, pode enviar uma solicitação à aeronave, para que ele carregue no servidor uma foto completa correspondente à área de interesse selecionada. Além disso, se em uma das áreas de interesse mostradas, o operador reconhecer a pessoa que está procurando, ele poderá enviar suas coordenadas de pouso preferidas para o computador de bordo, e o computador as encaminhará ao controlador de vôo.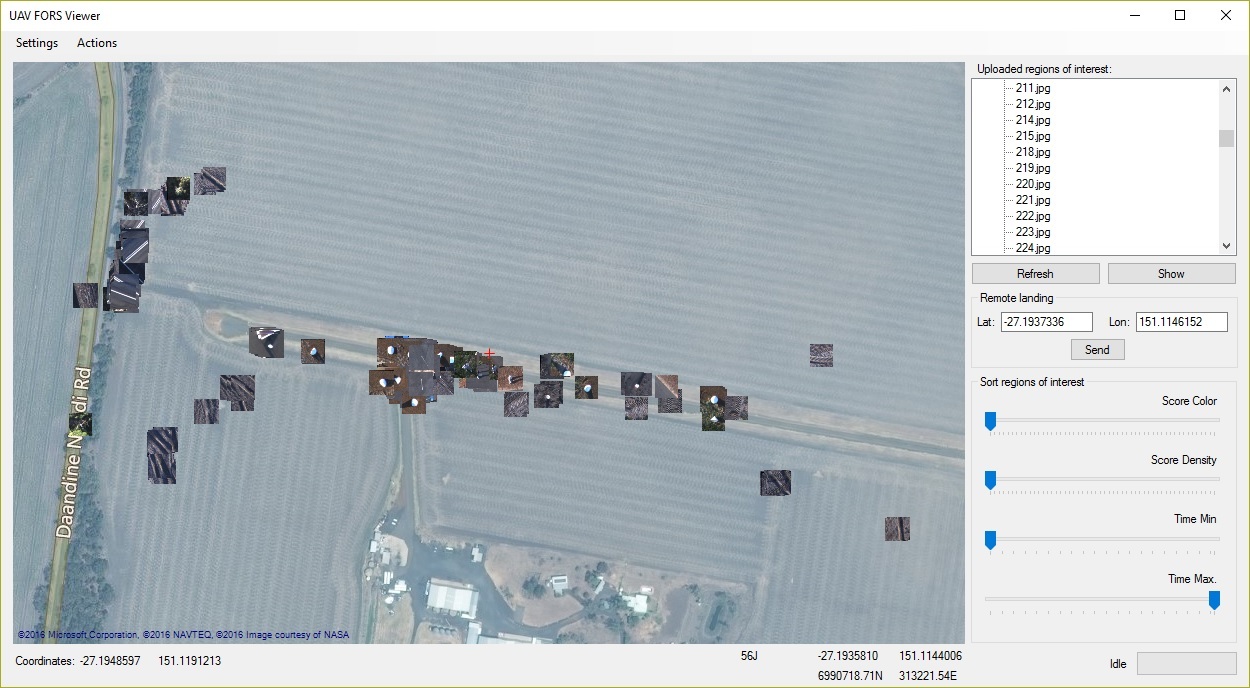 Aplicação no posto do operadorA máquina de vetores de suporte para classificar uma pessoa foi treinada por nós nos exemplos de fotografias tiradas durante os voos de teste. Antes de calcular o descritor HOG de cada uma das áreas de interesse, realizamos algumas transformações geométricas na área, de modo a trazer a pessoa potencial da imagem para uma posição vertical, pois o HOG tradicional funciona bem para classificar uma pessoa apenas na posição de pé.Classificação das regiões de interesse a bordo do drone: contorno vermelho - a região é classificada como não pessoal; o contorno verde - a região é classificada como pessoaComo a tarefa não era apenas encontrar uma pessoa, mas também escolher um local adequado para o pouso, além das operações acima, o sistema de visão computacional na aeronave principal foi programado para classificar o território sobre o qual a aeronave estava voando. Entre as classes possíveis foram identificadas: terra, asfalto, grama, arbustos e árvores, obstáculos não especificados; A classificação é baseada em informações sobre a cor e a heterogeneidade da imagem em um determinado local. Quando o operador da estação de trabalho precisa tomar uma decisão sobre o local de pouso, ele pode solicitar informações da aeronave sobre a classificação da seção de mapa de interesse.
Aplicação no posto do operadorA máquina de vetores de suporte para classificar uma pessoa foi treinada por nós nos exemplos de fotografias tiradas durante os voos de teste. Antes de calcular o descritor HOG de cada uma das áreas de interesse, realizamos algumas transformações geométricas na área, de modo a trazer a pessoa potencial da imagem para uma posição vertical, pois o HOG tradicional funciona bem para classificar uma pessoa apenas na posição de pé.Classificação das regiões de interesse a bordo do drone: contorno vermelho - a região é classificada como não pessoal; o contorno verde - a região é classificada como pessoaComo a tarefa não era apenas encontrar uma pessoa, mas também escolher um local adequado para o pouso, além das operações acima, o sistema de visão computacional na aeronave principal foi programado para classificar o território sobre o qual a aeronave estava voando. Entre as classes possíveis foram identificadas: terra, asfalto, grama, arbustos e árvores, obstáculos não especificados; A classificação é baseada em informações sobre a cor e a heterogeneidade da imagem em um determinado local. Quando o operador da estação de trabalho precisa tomar uma decisão sobre o local de pouso, ele pode solicitar informações da aeronave sobre a classificação da seção de mapa de interesse.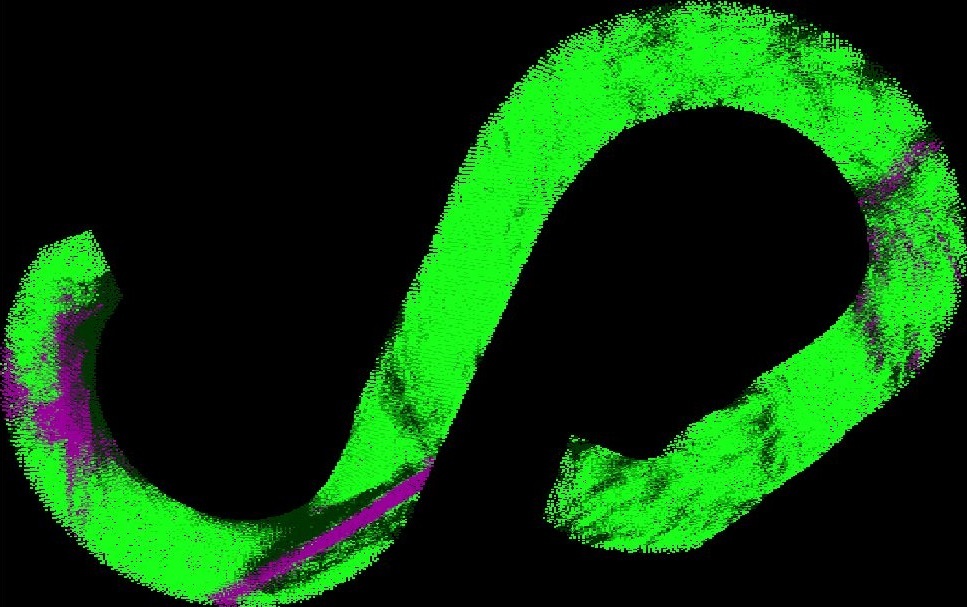 : - — , - — , —Além do drone principal descrito, decidimos usar um auxiliar, o qual seria responsável pela retransmissão no canal de comunicação entre a estação terrestre do operador e a aeronave principal. De fato, se o nosso drone principal estiver a vários quilômetros da estação terrestre, a manutenção da comunicação direta por rádio para receber dados de telemetria e comandos de transmissão se tornará problemática, tanto devido à diminuição da potência do sinal com o aumento da distância quanto ao aparecimento de obstáculos na linha de visão entre eles. antenas no chão e a bordo do dispositivo. Nem sempre é possível lidar com a dificuldade de estabelecer comunicação direta por rádio, aumentando a potência do sinal, pois, em primeiro lugar, existem restrições de estado que determinam a potência máxima permitida do sinal de rádio e, em segundo lugar,um aumento na potência pode não trazer um resultado positivo, especialmente quando a aeronave está em baixa altitude a uma grande distância. Resolvemos esse problema adicionando um repetidor, localizado em alta altitude, na linha de visão, tanto da estação do operador quanto da aeronave "em funcionamento".Para transferir o equipamento de revezamento, usamos uma asa voadora, feita com base na popular plataforma Skywalker X8. Nesse caso, a asa voadora se encaixa nas restrições causadas pela paisagem desconhecida da plataforma de lançamento, pois pode ser lançada de uma catapulta leve ou de uma bungee e pode pousar automaticamente, sem exigir espaço aberto significativo para isso. Para que a aeronave aterrisse sem trem de pouso, sem receber danos significativos, laminamos a parte inferior do casco com Kevlar e fibra de vidro. Além disso, para aumentar a resistência estrutural e oferecer a possibilidade de voar em velocidades mais altas, a borda principal da asa também foi laminada com fibra de vidro. O X8 foi equipado com um motor de 710 KV classificado para baterias de polímero de lítio de cinco células,e uma bateria para esse mecanismo por 16 amperes horas de seis células. Devido ao fato de termos usado uma bateria com uma tensão maior que a tensão nominal do motor, tivemos que fornecer entrada de ar adicional para resfriamento no projeto. Para o motor, foram utilizados um regulador de velocidade de 70 A e uma hélice dobrável de 9,5x8. Às onze, entregamos o servo HS-5625MG de alta qualidade da Hitec; os servidores têm uma margem significativa de desempenho, o que deve minimizar a possibilidade de perda das superfícies de controle, cada uma das quais é crítica no caso de uma asa voadora. Além disso, a bordo havia baterias pequenas adicionais para aviônicos e um sistema de terminação de emergência, bem como um controlador de vôo (Pixhawk). Como resultado, as características do dispositivo foram as seguintes: peso - 3,5 kg,velocidade máxima - 35 m / s, velocidade de cruzeiro - 25 m / s, tempo de vôo - até 55 minutos, distância percorrida - mais de 80 km.
: - — , - — , —Além do drone principal descrito, decidimos usar um auxiliar, o qual seria responsável pela retransmissão no canal de comunicação entre a estação terrestre do operador e a aeronave principal. De fato, se o nosso drone principal estiver a vários quilômetros da estação terrestre, a manutenção da comunicação direta por rádio para receber dados de telemetria e comandos de transmissão se tornará problemática, tanto devido à diminuição da potência do sinal com o aumento da distância quanto ao aparecimento de obstáculos na linha de visão entre eles. antenas no chão e a bordo do dispositivo. Nem sempre é possível lidar com a dificuldade de estabelecer comunicação direta por rádio, aumentando a potência do sinal, pois, em primeiro lugar, existem restrições de estado que determinam a potência máxima permitida do sinal de rádio e, em segundo lugar,um aumento na potência pode não trazer um resultado positivo, especialmente quando a aeronave está em baixa altitude a uma grande distância. Resolvemos esse problema adicionando um repetidor, localizado em alta altitude, na linha de visão, tanto da estação do operador quanto da aeronave "em funcionamento".Para transferir o equipamento de revezamento, usamos uma asa voadora, feita com base na popular plataforma Skywalker X8. Nesse caso, a asa voadora se encaixa nas restrições causadas pela paisagem desconhecida da plataforma de lançamento, pois pode ser lançada de uma catapulta leve ou de uma bungee e pode pousar automaticamente, sem exigir espaço aberto significativo para isso. Para que a aeronave aterrisse sem trem de pouso, sem receber danos significativos, laminamos a parte inferior do casco com Kevlar e fibra de vidro. Além disso, para aumentar a resistência estrutural e oferecer a possibilidade de voar em velocidades mais altas, a borda principal da asa também foi laminada com fibra de vidro. O X8 foi equipado com um motor de 710 KV classificado para baterias de polímero de lítio de cinco células,e uma bateria para esse mecanismo por 16 amperes horas de seis células. Devido ao fato de termos usado uma bateria com uma tensão maior que a tensão nominal do motor, tivemos que fornecer entrada de ar adicional para resfriamento no projeto. Para o motor, foram utilizados um regulador de velocidade de 70 A e uma hélice dobrável de 9,5x8. Às onze, entregamos o servo HS-5625MG de alta qualidade da Hitec; os servidores têm uma margem significativa de desempenho, o que deve minimizar a possibilidade de perda das superfícies de controle, cada uma das quais é crítica no caso de uma asa voadora. Além disso, a bordo havia baterias pequenas adicionais para aviônicos e um sistema de terminação de emergência, bem como um controlador de vôo (Pixhawk). Como resultado, as características do dispositivo foram as seguintes: peso - 3,5 kg,velocidade máxima - 35 m / s, velocidade de cruzeiro - 25 m / s, tempo de vôo - até 55 minutos, distância percorrida - mais de 80 km. Deve-se notar que adicionar uma aeronave adicional ao sistema para aumentar a área de cobertura da comunicação leva ao problema de organizar a própria comunicação, pois nesse caso, além de analisar a telemetria do drone principal e enviar comandos para ele, a estação base deve suportar a comunicação em larga escala com a aeronave auxiliar aparelho. Obviamente, essa comunicação pode ser organizada adicionando dois modems de rádio adicionais (um para o drone auxiliar e outro para a estação terrestre) operando em um canal que não interfere no equipamento já existente no sistema. Essa opção, no entanto, não é ideal devido a custos adicionais e à falta de escalabilidade ao adicionar novos drones ao sistema.A melhor opção é usar um transceptor de rádio existente nele para se comunicar com a aeronave auxiliar. Nesse caso, o esquema de comunicação no sistema é exibido como mostrado no diagrama abaixo.Esquema de comunicação entre a aeronave e a estação do operadorConforme descrito acima, o sistema possui apenas três modems de rádio responsáveis por resolver conflitos de transmissão ao acessar o único canal de rádio que eles usam. Duas estações base usadas para monitorar e controlar cada uma das aeronaves recebem e transmitem através do mesmo modem de rádio, cujo acesso é controlado pelo aplicativo de switch instalado em uma das estações (no nosso caso, esse aplicativo era de má qualidade). A troca de pacotes entre aplicativos de monitoramento / gerenciamento e o aplicativo switch é feita usando UDP.Destaca-se o papel do módulo "Roteador" no esquema de comunicação acima. Esse módulo simplesmente passa pacotes provenientes de um controlador de vôo ou estação base conectada a ele e toma uma das seguintes decisões sobre pacotes provenientes de um modem de rádio conectado: ignore o pacote, envie o pacote de volta ao rádio modem, envie o pacote ao controlador de vôo ou estação base conectada . O roteador ignora o pacote se ele já foi encontrado por esse roteador antes. Se o pacote não foi encontrado anteriormente, mas não se destina ao dispositivo ao qual o roteador está conectado, esse pacote é enviado de volta ao modem de rádio. Em outros casos, o pacote é enviado ao dispositivo conectado ao roteador. Durante nossos últimos testes,devido a suposições sobre a posição relativa da aeronave, nos roteadores no drone principal e na estação base, desativamos a opção de enviar o pacote de volta ao modem de rádio para reduzir a carga no canal de rádio.Com relação ao problema de determinar pelo roteador se o pacote recebido é destinado a este dispositivo, a solução não é totalmente trivial. O fato é que, para comunicação com aeronaves, usamos o protocolo mavlink, que é o padrão de fato para drones personalizados. Os cabeçalhos do mavlink não contêm informações sobre o destinatário do pacote, embora haja um subsistema identificador e remetente do sistema. No nosso caso, apenas o controlador de vôo do aparelho auxiliar deve lidar com a interpretação dos comandos da "Estação Base 1" e apenas o controlador de vôo do aparelho principal da "Estação Base 2", para que possamos classificar os pacotes apenas com o ID do remetente. Essa solução funciona de maneira bastante confiável, mas, novamente, é em pequena escala e precisa de processamento adicional.Pacotes de filtragem de roteador provenientes de ummodem de rádio Usamos o RFD 868+ como modems de rádio. Os roteadores foram fabricados por nós com base no STM32 Nucleo, ao qual adicionamos uma blindagem para simplificar a fonte de alimentação da placa, para expandir as possibilidades de comunicação e indicação.
Deve-se notar que adicionar uma aeronave adicional ao sistema para aumentar a área de cobertura da comunicação leva ao problema de organizar a própria comunicação, pois nesse caso, além de analisar a telemetria do drone principal e enviar comandos para ele, a estação base deve suportar a comunicação em larga escala com a aeronave auxiliar aparelho. Obviamente, essa comunicação pode ser organizada adicionando dois modems de rádio adicionais (um para o drone auxiliar e outro para a estação terrestre) operando em um canal que não interfere no equipamento já existente no sistema. Essa opção, no entanto, não é ideal devido a custos adicionais e à falta de escalabilidade ao adicionar novos drones ao sistema.A melhor opção é usar um transceptor de rádio existente nele para se comunicar com a aeronave auxiliar. Nesse caso, o esquema de comunicação no sistema é exibido como mostrado no diagrama abaixo.Esquema de comunicação entre a aeronave e a estação do operadorConforme descrito acima, o sistema possui apenas três modems de rádio responsáveis por resolver conflitos de transmissão ao acessar o único canal de rádio que eles usam. Duas estações base usadas para monitorar e controlar cada uma das aeronaves recebem e transmitem através do mesmo modem de rádio, cujo acesso é controlado pelo aplicativo de switch instalado em uma das estações (no nosso caso, esse aplicativo era de má qualidade). A troca de pacotes entre aplicativos de monitoramento / gerenciamento e o aplicativo switch é feita usando UDP.Destaca-se o papel do módulo "Roteador" no esquema de comunicação acima. Esse módulo simplesmente passa pacotes provenientes de um controlador de vôo ou estação base conectada a ele e toma uma das seguintes decisões sobre pacotes provenientes de um modem de rádio conectado: ignore o pacote, envie o pacote de volta ao rádio modem, envie o pacote ao controlador de vôo ou estação base conectada . O roteador ignora o pacote se ele já foi encontrado por esse roteador antes. Se o pacote não foi encontrado anteriormente, mas não se destina ao dispositivo ao qual o roteador está conectado, esse pacote é enviado de volta ao modem de rádio. Em outros casos, o pacote é enviado ao dispositivo conectado ao roteador. Durante nossos últimos testes,devido a suposições sobre a posição relativa da aeronave, nos roteadores no drone principal e na estação base, desativamos a opção de enviar o pacote de volta ao modem de rádio para reduzir a carga no canal de rádio.Com relação ao problema de determinar pelo roteador se o pacote recebido é destinado a este dispositivo, a solução não é totalmente trivial. O fato é que, para comunicação com aeronaves, usamos o protocolo mavlink, que é o padrão de fato para drones personalizados. Os cabeçalhos do mavlink não contêm informações sobre o destinatário do pacote, embora haja um subsistema identificador e remetente do sistema. No nosso caso, apenas o controlador de vôo do aparelho auxiliar deve lidar com a interpretação dos comandos da "Estação Base 1" e apenas o controlador de vôo do aparelho principal da "Estação Base 2", para que possamos classificar os pacotes apenas com o ID do remetente. Essa solução funciona de maneira bastante confiável, mas, novamente, é em pequena escala e precisa de processamento adicional.Pacotes de filtragem de roteador provenientes de ummodem de rádio Usamos o RFD 868+ como modems de rádio. Os roteadores foram fabricados por nós com base no STM32 Nucleo, ao qual adicionamos uma blindagem para simplificar a fonte de alimentação da placa, para expandir as possibilidades de comunicação e indicação.Conclusão
De acordo com os requisitos da competição, para a passagem para a parte final, cada uma das aeronaves descritas voou mais de cinco horas; Durante esses vôos de teste, identificamos e corrigimos muitos problemas e erros pequenos e significativos. Nosso relatório de vídeo para esta etapa ficou assim:Um dos erros mais desagradáveis no projeto mecânico que notamos durante os vôos preparatórios foi uma assimetria significativa da carga nos motores de helicóptero durante a conversão do modo avião para helicóptero. O fato é que um ângulo de ataque positivo da asa da aeronave em baixas velocidades desvia os feixes com os motores de helicóptero de volta, de modo que dois motores mais próximos da cauda da aeronave recebam uma grande carga durante a conversão. Além disso, o momento reativo da hélice da aeronave cria uma carga adicional nos motores do lado esquerdo, para que o motor traseiro esquerdo seja o mais intenso. No nosso caso, essa irregularidade várias vezes levou a mau funcionamento da usina e a um comportamento instável da aeronave, que uma vez terminou em uma queda com graves danos ao casco. Até o momentoquando identificamos o motivo de um comportamento tão incorreto do dispositivo (três meses antes da competição), era muito tarde para fazer alterações na mecânica ou tentar ajustar o programa de conversão, por isso corremos o risco de continuar participando do desafio, sabendo que nosso design não possui redundância em caso de acidente . No entanto, tentamos de todas as formas possíveis minimizar a possibilidade de mau funcionamento, controlando, tanto quanto possível, a capacidade de manutenção de todos os elementos, conexões e acessórios antes de cada voo.tentamos de todas as maneiras possíveis minimizar a possibilidade de mau funcionamento, enquanto controlamos ao máximo a capacidade de manutenção de todos os elementos, conexões e acessórios antes de cada voo.tentamos de todas as maneiras possíveis minimizar a possibilidade de mau funcionamento, enquanto controlamos ao máximo a capacidade de manutenção de todos os elementos, conexões e acessórios antes de cada voo.Infelizmente, as precauções que tomamos não foram suficientes, e nosso quadriátero caiu durante um dos vôos de teste que fizemos na Austrália para verificar a integridade estrutural após a montagem do dispositivo no local da competição. No caso de um acidente, toda a estrutura sofreu danos significativos; portanto, não foi possível consertar o aparato e tentar concluir pelo menos parte da missão. Os organizadores, no entanto, foram simpáticos à nossa situação e nos deram permissão para voar com um dispositivo auxiliar, a fim de verificar o alcance de nossas comunicações por rádio e a capacidade de controlar o dispositivo além da linha de visão.No final, vale dizer que nenhuma das equipes deste ano conseguiu cumprir plenamente a missão da competição, que foi associada à perda de aeronaves por vários motivos: acidente, incêndio, voo fora do espaço de voo alocado e, como regra, pairando em uma árvore. Durante o desafio, a equipe da TU Delft (o projeto mecânico original e um modelo de teste do sistema de visão computacional da Parrot, um vídeo sobre um drone aqui ) e o Canberra UAV (entregou uma amostra de sangue, mas bateu um helicóptero auxiliar, um vídeo sobre um drone aqui ) foram os mais notados .Para nós, assim como para outras equipes, o desafio serviu como uma excelente plataforma para experimentar e se comunicar com profissionais de drones de todo o mundo. Adquirimos grande experiência e coletamos muito material que nos ajudará ainda mais em nossos projetos pessoais e na preparação para as próximas competições.Materiais
" Regras do UAV Challenge Medical Express 2016." Um artigo dos organizadores do desafio sobre as estatísticas e o histórico da competição.» Descrição do sucesso do UAV de Canberra por Andrew Trijell, líder ideológico da equipe.Source: https://habr.com/ru/post/pt399699/
All Articles