Os cientistas desenvolveram um chip para o planejamento de movimentos de robôs em tempo real
 Se você já assistiu como as versões demo dos robôs funcionam, provavelmente percebeu que o robô pode "congelar" por um longo tempo antes de continuar se movendo. Você pode pensar que dessa maneira o robô pondera em que ponto e ao longo de qual caminho se mover. Essa suposição não está longe da verdade: neste momento, o processador processa as operações de planejamento de movimento, que geralmente levam muito tempo.Pesquisadores da Duke University encontraram uma maneira de acelerar o planejamento de movimentos de robôs três vezes, usando um vigésimo da energia necessária hoje. No centro de sua solução, há um processador especializado que pode executar a parte mais demorada do trabalho - verificando todas as colisões possíveis em toda a amplitude de movimento do robô - com alta eficiência.O planejamento de movimento, por exemplo, para um braço robótico envolve principalmente a criação de um mapa de rota probabilístico. É um gráfico que consiste em pontos em um espaço livre de obstáculos com linhas de nervuras conectando esses pontos, para que cada movimento entre eles não leve a uma colisão. De fato, o planejador de movimento seleciona os pontos inicial e final no gráfico e, em seguida, determina a maneira mais eficaz de se mover para ir de um ponto a outro.
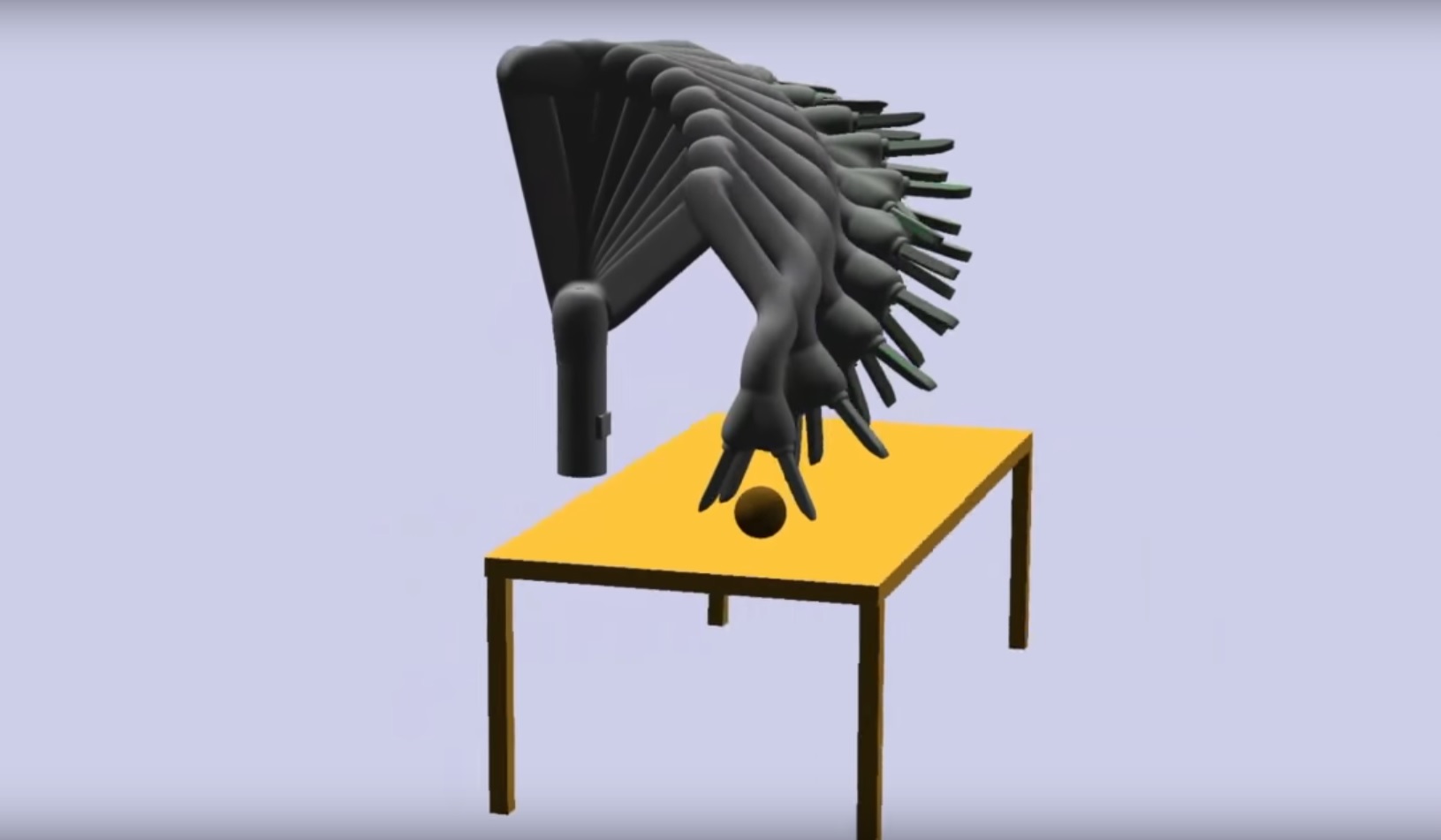
Se você já assistiu como as versões demo dos robôs funcionam, provavelmente percebeu que o robô pode "congelar" por um longo tempo antes de continuar se movendo. Você pode pensar que dessa maneira o robô pondera em que ponto e ao longo de qual caminho se mover. Essa suposição não está longe da verdade: neste momento, o processador processa as operações de planejamento de movimento, que geralmente levam muito tempo.Pesquisadores da Duke University encontraram uma maneira de acelerar o planejamento de movimentos de robôs três vezes, usando um vigésimo da energia necessária hoje. No centro de sua solução, há um processador especializado que pode executar a parte mais demorada do trabalho - verificando todas as colisões possíveis em toda a amplitude de movimento do robô - com alta eficiência.O planejamento de movimento, por exemplo, para um braço robótico envolve principalmente a criação de um mapa de rota probabilístico. É um gráfico que consiste em pontos em um espaço livre de obstáculos com linhas de nervuras conectando esses pontos, para que cada movimento entre eles não leve a uma colisão. De fato, o planejador de movimento seleciona os pontos inicial e final no gráfico e, em seguida, determina a maneira mais eficaz de se mover para ir de um ponto a outro. Os algoritmos de planejamento de movimento estão procurando o caminho ideal de um ponto para outro, o que permite evitar obstáculos (à esquerda). Um mapa probabilístico de rotas com arestas conectando pontos no espaço livre (direita).Em teoria, parece bastante simples, mas na prática, você precisa levar em consideração o fato de estar trabalhando com um braço robótico. E quando o pincel se move de um ponto para outro, o antebraço pode colidir com um obstáculo. A área na qual o braço do robô se move é chamada de "volume de trabalho".
Os algoritmos de planejamento de movimento estão procurando o caminho ideal de um ponto para outro, o que permite evitar obstáculos (à esquerda). Um mapa probabilístico de rotas com arestas conectando pontos no espaço livre (direita).Em teoria, parece bastante simples, mas na prática, você precisa levar em consideração o fato de estar trabalhando com um braço robótico. E quando o pincel se move de um ponto para outro, o antebraço pode colidir com um obstáculo. A área na qual o braço do robô se move é chamada de "volume de trabalho".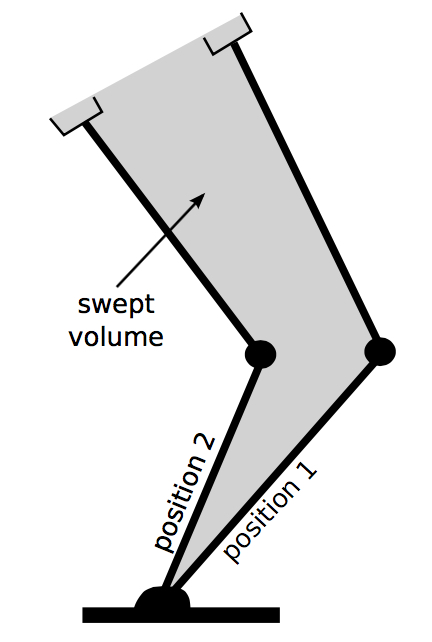 O volume de trabalho é o espaço no qual o robô muda de posição de uma posição para outra.Os resultados do estudo mostraram que a detecção de obstáculos leva mais de 99% do tempo computacional. Cálculos preliminares são feitos quando o robô está configurado. Você cria um mapa, que consiste em aproximadamente 150 mil arestas, descrevendo as possíveis trajetórias do robô, evitando auto-colisões e colisões com itens que não mudam de posição, por exemplo, sexo.150 mil costelas são demais para o protótipo do sistema de equipes da Duke University. Como um número mais razoável é próximo de 1000, os pesquisadores tiveram que encontrar uma maneira de reduzir seu número.Para acelerar e simplificar todo o processo, os pesquisadores primeiro modelaram cerca de 10 mil cenários com diferentes números de obstáculos localizados aleatoriamente de diferentes tamanhos e depois verificaram quais arestas no mapa são usadas pelo sistema para planejar o movimento. As costelas raramente usadas foram removidas do mapa. Após várias iterações de redução e verificação dos resultados em um exemplo, o número de arestas acabou sendo menor que mil. Ao mesmo tempo, a redução não afetou a capacidade de resolver dois problemas principais do planejador de movimento - velocidade de processamento lenta e alto consumo de energia.Limitar o número de arestas no mapa a um valor aceitável é muito importante, porque os recursos do processador que processa as operações de planejamento são limitados. Nesse caso, o processador - circuito integrado lógico programável ( FPGA ) - é programado com uma matriz de circuitos de detecção de colisão, cada um dos quais corresponde a uma borda no mapa. Assim, o tamanho da placa é limitado pelo número de circuitos que podem caber no FPGA - um máximo de vários milhares.A tecnologia dos cientistas da Duke University funciona dividindo o espaço de trabalho em milhares de voxels. O algoritmo determina então se uma trajetória de objeto pré-programada é incorporada em um dos voxels. Graças aos FPGAs, a tecnologia verifica milhares de rotas ao mesmo tempo e, em seguida, percorre o caminho mais curto usando as opções de segurança restantes. O robô só pode executá-lo.Na saída, os cientistas receberam uma aceleração significativa: não importa quantas arestas no cartão, a velocidade de processamento do FPGA de todo o cartão foi de 50 nanossegundos por pixel. Em um exemplo particularmente complexo, o processamento levou um pouco mais de 0,6 ms. O agendador, que trabalhava com base em um processador Intel Xeon de quatro núcleos com uma frequência de clock de 3,5 gigahertz, lidou com essa tarefa em 2.738 ms. Os processadores convencionais consomem cerca de 200 a 300 watts de eletricidade durante o planejamento do movimento, e o desenvolvimento dos cientistas da Universidade Duke é inferior a 10 watts.Agora, os robôs industriais não usam planejadores de movimento. No que diz respeito, por exemplo, à montagem na linha de montagem de carros usando robôs, o ambiente é planejado de forma que os robôs possam repetir cegamente os mesmos movimentos repetidamente. Eles simplesmente não têm a oportunidade de cometer um erro: as partes do carro sempre se encontram no mesmo lugar, e os robôs são mantidos em caixas especiais que as cercam das pessoas. Porém, se o robô usar algoritmos de planejamento de movimento em tempo real, não poderá ser prejudicado por pessoas que passam erradas ou por um mau funcionamento do transportador - os robôs farão seu trabalho com a precisão usual.O planejamento de tráfego em tempo real economiza tempo e custos para projetar o ambiente do ambiente do robô. Os cientistas estudam a tecnologia de planejamento nos últimos 30 anos e os recentes avanços tornaram possível criar um plano de movimento aprimorado em questão de segundos. As abordagens existentes, com algumas exceções, dependem dos recursos dos processadores centrais ou mais rápidos, mas também de GPUs que consomem mais energia. Segundo os cientistas, o processador central é bom em resolver diferentes tipos de tarefas, mas não pode competir com um processador especialmente projetado para apenas uma tarefa específica.Dinesh Manocha, professor da Universidade da Carolina do Norte em Chapel Hill, que trabalha em um planejador de movimento em tempo real em GPUs, concorda que os FPGAs têm o potencial de aumentar a eficiência do planejamento de movimento. Ele está confiante de que o desenvolvimento dos cientistas encontrará sua aplicação prática em um futuro próximo: os robôs estão sendo cada vez mais usados em condições novas e incertas, o papel do planejamento de tráfego só aumentará com o tempo.A Startup Realtime Robotics comercializará cientistas de tecnologia. Como parte deste projeto, os FPGAs serão substituídos por circuitos integrados especializados ( ASICs ), que podem combinar mais de 100 mil arestas. Essa atualização permitirá que os robôs trabalhem em uma ampla variedade de ambientes.
O volume de trabalho é o espaço no qual o robô muda de posição de uma posição para outra.Os resultados do estudo mostraram que a detecção de obstáculos leva mais de 99% do tempo computacional. Cálculos preliminares são feitos quando o robô está configurado. Você cria um mapa, que consiste em aproximadamente 150 mil arestas, descrevendo as possíveis trajetórias do robô, evitando auto-colisões e colisões com itens que não mudam de posição, por exemplo, sexo.150 mil costelas são demais para o protótipo do sistema de equipes da Duke University. Como um número mais razoável é próximo de 1000, os pesquisadores tiveram que encontrar uma maneira de reduzir seu número.Para acelerar e simplificar todo o processo, os pesquisadores primeiro modelaram cerca de 10 mil cenários com diferentes números de obstáculos localizados aleatoriamente de diferentes tamanhos e depois verificaram quais arestas no mapa são usadas pelo sistema para planejar o movimento. As costelas raramente usadas foram removidas do mapa. Após várias iterações de redução e verificação dos resultados em um exemplo, o número de arestas acabou sendo menor que mil. Ao mesmo tempo, a redução não afetou a capacidade de resolver dois problemas principais do planejador de movimento - velocidade de processamento lenta e alto consumo de energia.Limitar o número de arestas no mapa a um valor aceitável é muito importante, porque os recursos do processador que processa as operações de planejamento são limitados. Nesse caso, o processador - circuito integrado lógico programável ( FPGA ) - é programado com uma matriz de circuitos de detecção de colisão, cada um dos quais corresponde a uma borda no mapa. Assim, o tamanho da placa é limitado pelo número de circuitos que podem caber no FPGA - um máximo de vários milhares.A tecnologia dos cientistas da Duke University funciona dividindo o espaço de trabalho em milhares de voxels. O algoritmo determina então se uma trajetória de objeto pré-programada é incorporada em um dos voxels. Graças aos FPGAs, a tecnologia verifica milhares de rotas ao mesmo tempo e, em seguida, percorre o caminho mais curto usando as opções de segurança restantes. O robô só pode executá-lo.Na saída, os cientistas receberam uma aceleração significativa: não importa quantas arestas no cartão, a velocidade de processamento do FPGA de todo o cartão foi de 50 nanossegundos por pixel. Em um exemplo particularmente complexo, o processamento levou um pouco mais de 0,6 ms. O agendador, que trabalhava com base em um processador Intel Xeon de quatro núcleos com uma frequência de clock de 3,5 gigahertz, lidou com essa tarefa em 2.738 ms. Os processadores convencionais consomem cerca de 200 a 300 watts de eletricidade durante o planejamento do movimento, e o desenvolvimento dos cientistas da Universidade Duke é inferior a 10 watts.Agora, os robôs industriais não usam planejadores de movimento. No que diz respeito, por exemplo, à montagem na linha de montagem de carros usando robôs, o ambiente é planejado de forma que os robôs possam repetir cegamente os mesmos movimentos repetidamente. Eles simplesmente não têm a oportunidade de cometer um erro: as partes do carro sempre se encontram no mesmo lugar, e os robôs são mantidos em caixas especiais que as cercam das pessoas. Porém, se o robô usar algoritmos de planejamento de movimento em tempo real, não poderá ser prejudicado por pessoas que passam erradas ou por um mau funcionamento do transportador - os robôs farão seu trabalho com a precisão usual.O planejamento de tráfego em tempo real economiza tempo e custos para projetar o ambiente do ambiente do robô. Os cientistas estudam a tecnologia de planejamento nos últimos 30 anos e os recentes avanços tornaram possível criar um plano de movimento aprimorado em questão de segundos. As abordagens existentes, com algumas exceções, dependem dos recursos dos processadores centrais ou mais rápidos, mas também de GPUs que consomem mais energia. Segundo os cientistas, o processador central é bom em resolver diferentes tipos de tarefas, mas não pode competir com um processador especialmente projetado para apenas uma tarefa específica.Dinesh Manocha, professor da Universidade da Carolina do Norte em Chapel Hill, que trabalha em um planejador de movimento em tempo real em GPUs, concorda que os FPGAs têm o potencial de aumentar a eficiência do planejamento de movimento. Ele está confiante de que o desenvolvimento dos cientistas encontrará sua aplicação prática em um futuro próximo: os robôs estão sendo cada vez mais usados em condições novas e incertas, o papel do planejamento de tráfego só aumentará com o tempo.A Startup Realtime Robotics comercializará cientistas de tecnologia. Como parte deste projeto, os FPGAs serão substituídos por circuitos integrados especializados ( ASICs ), que podem combinar mais de 100 mil arestas. Essa atualização permitirá que os robôs trabalhem em uma ampla variedade de ambientes.Source: https://habr.com/ru/post/pt400079/
All Articles