Criação e teste de um motor sem escova
Neste artigo, gostaríamos de falar sobre como criamos um motor elétrico a partir do zero: da idéia e do primeiro protótipo a um motor completo que passou em todos os testes. Se este artigo lhe parecer interessante, separadamente, com mais detalhes, falaremos sobre as etapas mais interessantes do nosso trabalho. Na figura da esquerda para a direita: rotor, estator, montagem parcial do motor, montagem do motor
Na figura da esquerda para a direita: rotor, estator, montagem parcial do motor, montagem do motorEntrada
Os motores elétricos surgiram há mais de 150 anos, mas durante esse período seu design não sofreu alterações especiais: um rotor rotativo, enrolamentos do estator de cobre, rolamentos. Ao longo dos anos, houve apenas uma diminuição no peso dos motores elétricos, um aumento na eficiência e também na precisão do controle de velocidade.Hoje, graças ao desenvolvimento da eletrônica moderna e ao surgimento de ímãs poderosos baseados em metais de terras raras, é possível criar motores elétricos " Brushless " poderosos e ao mesmo tempo compactos e leves . Ao mesmo tempo, devido à simplicidade de seu design, eles são os mais confiáveis entre os motores elétricos já criados. A criação desse motor será discutida neste artigo.Descrição do motor
Em “Motores sem escova”, não existe um elemento “Escova”, familiar para todos na desmontagem de uma ferramenta elétrica, cujo papel é transferir corrente para o enrolamento de um rotor rotativo. Nos motores sem escova, a corrente é fornecida aos enrolamentos de um estator não móvel, que, criando um campo magnético alternadamente em seus pólos individuais, gira o rotor no qual os ímãs são montados.O primeiro desses motores foi impresso por nós como uma impressora 3D como um experimento. Em vez de placas especiais feitas de aço elétrico, usamos plástico comum para o corpo do rotor e o núcleo do estator, nos quais uma bobina de cobre foi enrolada. Ímãs retangulares de neodímio foram montados no rotor. Naturalmente, esse motor não era capaz de fornecer potência máxima. No entanto, isso foi suficiente para o motor girar até 20k rpm, após o que o plástico não o suportou e o rotor do motor se separou e os ímãs se espalharam. Esse experimento nos encorajou a criar um motor completo.Os primeiros protótipos
Tendo aprendido a opinião dos amantes de modelos controlados por rádio, como tarefa, escolhemos um motor para carros de corrida do tamanho “540”, como o mais popular. Este motor tem dimensões de 54 mm de comprimento e 36 mm de diâmetro. Fizemos orotor do novo motor a partir de um único ímã em forma de cilindro de neodímio. Um ímã epóxi foi colado a um eixo usinado em aço-ferramenta em uma produção piloto. Cortamos o estator com um laser a partir de um conjunto de chapas de aço de transformadores com 0,5 mm de espessura. Cada placa foi então cuidadosamente envernizada e, em seguida, um estator acabado foi colado a partir de cerca de 50 placas. As placas foram envernizadas para evitar curtos-circuitos entre elas e para excluir perdas de energia nas correntes de Foucault que poderiam ocorrer no estator.
estator com um laser a partir de um conjunto de chapas de aço de transformadores com 0,5 mm de espessura. Cada placa foi então cuidadosamente envernizada e, em seguida, um estator acabado foi colado a partir de cerca de 50 placas. As placas foram envernizadas para evitar curtos-circuitos entre elas e para excluir perdas de energia nas correntes de Foucault que poderiam ocorrer no estator. A carcaça do motor era feita de duas partes de alumínio na forma de um recipiente. O estator se encaixa firmemente na carcaça de alumínio e se encaixa bem contra as paredes. Esse design fornece um bom resfriamento do motor.
A carcaça do motor era feita de duas partes de alumínio na forma de um recipiente. O estator se encaixa firmemente na carcaça de alumínio e se encaixa bem contra as paredes. Esse design fornece um bom resfriamento do motor.
Medição de desempenho
Para alcançar as características máximas de seus desenvolvimentos, é necessário realizar uma avaliação adequada e uma medição precisa das características. Para isso, projetamos e montamos um dynostend especial.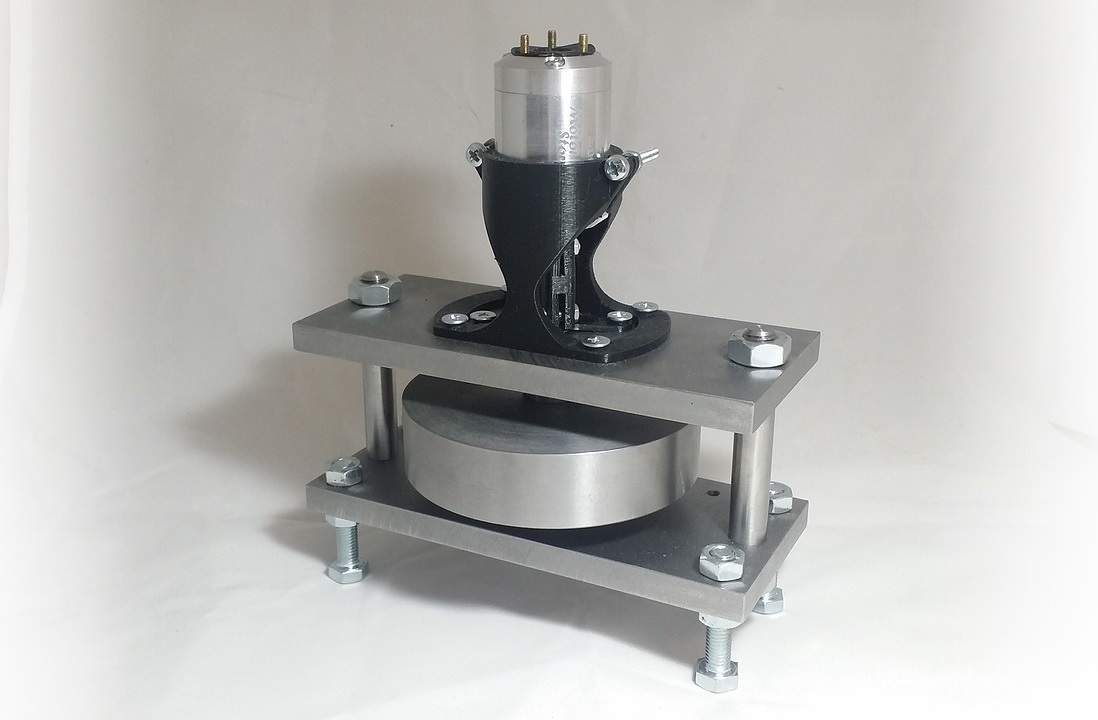 O elemento principal do suporte é uma carga pesada na forma de uma arruela. Durante as medições, o motor gira uma determinada carga e a potência de saída e o torque do motor são calculados pela velocidade e aceleração angulares.Para medir a velocidade de rotação da carga, são utilizados um par de ímãs no eixo e um sensor digital magnético A3144 baseado no efeito hall. Obviamente, seria possível medir rotações por impulsos diretamente dos enrolamentos do motor, uma vez que este motor é síncrono. No entanto, a versão com o sensor é mais confiável e funcionará mesmo em velocidades muito baixas, nas quais os pulsos serão ilegíveis.Além das revoluções, nosso estande é capaz de medir vários parâmetros mais importantes:
O elemento principal do suporte é uma carga pesada na forma de uma arruela. Durante as medições, o motor gira uma determinada carga e a potência de saída e o torque do motor são calculados pela velocidade e aceleração angulares.Para medir a velocidade de rotação da carga, são utilizados um par de ímãs no eixo e um sensor digital magnético A3144 baseado no efeito hall. Obviamente, seria possível medir rotações por impulsos diretamente dos enrolamentos do motor, uma vez que este motor é síncrono. No entanto, a versão com o sensor é mais confiável e funcionará mesmo em velocidades muito baixas, nas quais os pulsos serão ilegíveis.Além das revoluções, nosso estande é capaz de medir vários parâmetros mais importantes:- fornecer corrente (até 30A) usando um sensor de corrente baseado no efeito hall ACS712;
- tensão de alimentação. Medido diretamente através do ADC do microcontrolador, através de um divisor de tensão;
- temperatura dentro / fora do motor. A temperatura é medida pela resistência térmica do semicondutor;
Para coletar todos os parâmetros dos sensores e transferi-los para um computador, o microcontrolador AVR da série mega é usado na placa nano Arduino. O microcontrolador se comunica com o computador através da porta COM. Para processar as leituras, um programa especial foi gravado, calculando a média e demonstrando os resultados da medição.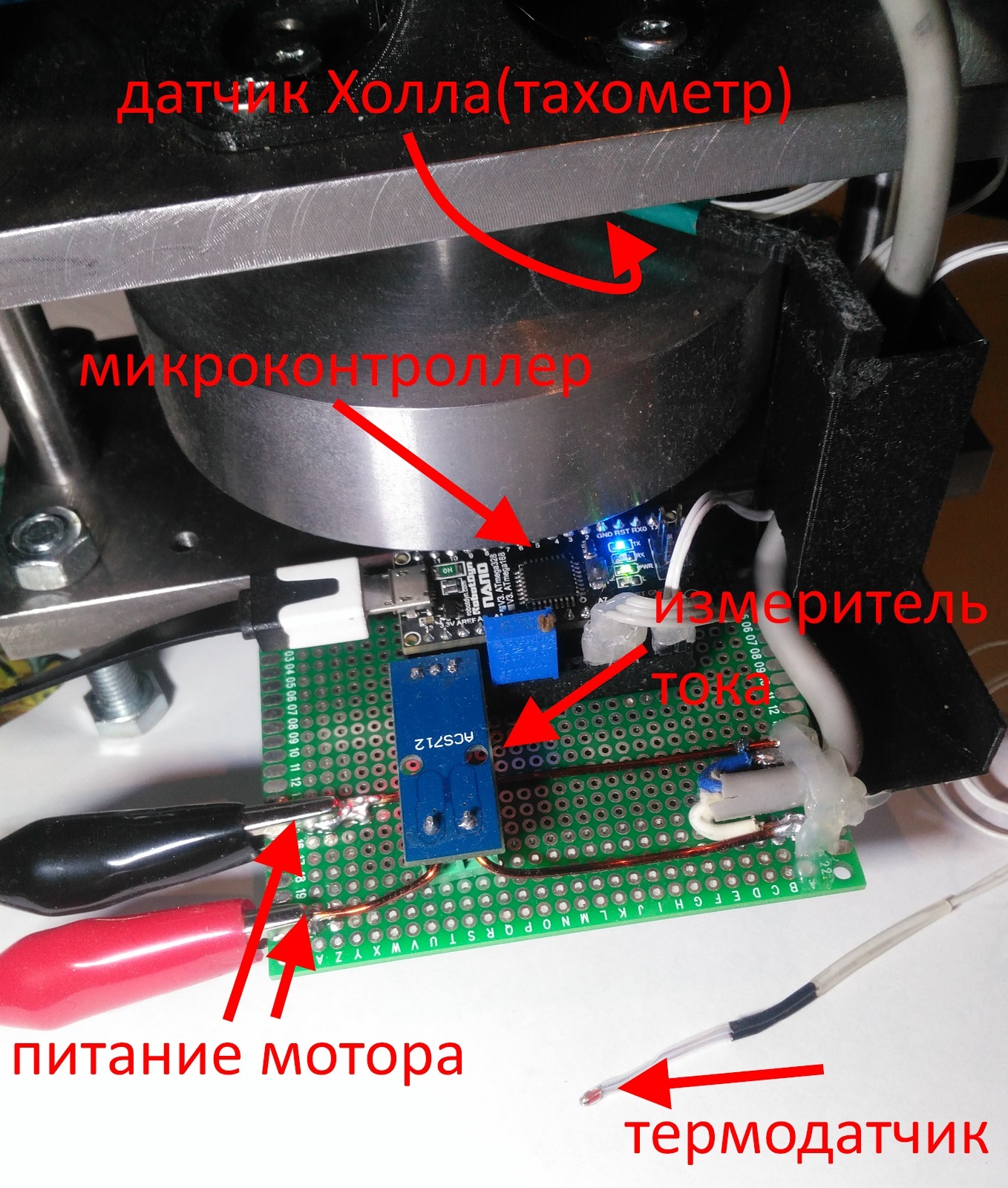 Como resultado, nosso estande é capaz de medir as seguintes características do motor a qualquer momento:
Como resultado, nosso estande é capaz de medir as seguintes características do motor a qualquer momento:- consumo atual;
- consumo de energia;
- consumo de energia;
- potência de saída;
- rotações do eixo;
- momento no eixo;
- Eficiência
- poder indo para aquecer;
- temperatura dentro do motor.
Vídeo demonstrativo do trabalho do estande:Resultados do teste
Para testar o desempenho do suporte, primeiro o testamos em um motor comutador R540-6022 convencional. Existem poucos parâmetros conhecidos para este motor, mas isso foi suficiente para avaliar os resultados das medições, que se mostraram bastante próximos dos de fábrica.Então nosso motor já foi testado. Naturalmente, ele foi capaz de mostrar melhor eficiência (65% versus 45%) e, ao mesmo tempo, um momento maior (1200 versus 250 g por cm) que um motor comum. A medição de temperatura também deu bons resultados, durante o teste o motor não aqueceu acima de 80 graus.Mas no momento as medições ainda não são finais. Não conseguimos medir o motor em toda a faixa de velocidade devido à potência limitada da fonte de energia. Também temos que comparar nosso motor com os de concorrentes similares e testá-lo "em batalha", colocando-o em um carro controlado por rádio e falando em competições. Source: https://habr.com/ru/post/pt400337/
All Articles