Por alguma razão, poucas pessoas na Rússia sabem sobre a situação real com o uso de várias robótica no local de emergência da central nuclear de Fukushima. O público em geral tem um estereótipo inequívoco:

De fato, em vários trabalhos durante a liquidação das consequências do acidente na usina nuclear de Fukushima (provavelmente escreverei mais pelo bem da FAE), centenas de unidades de vários robôs com controle remoto foram usadas e estão sendo usadas. A escala de uso de carros com controle remoto é incomparavelmente maior do que na usina nuclear de Chernobyl, pelas simples razões de que todo esse equipamento se desenvolveu rapidamente nos últimos 30 anos e porque o acidente na usina nuclear de Chernobyl é mais generalizado do que na usina nuclear de Chernobyl.
 Aspirador de pó robô, versão japonesa para Fukushima.
Aspirador de pó robô, versão japonesa para Fukushima.Antes de olhar para os robôs, vale a pena pelo menos em termos gerais imaginar que o trabalho foi realizado no FAES nos últimos 6 anos desde o acidente.
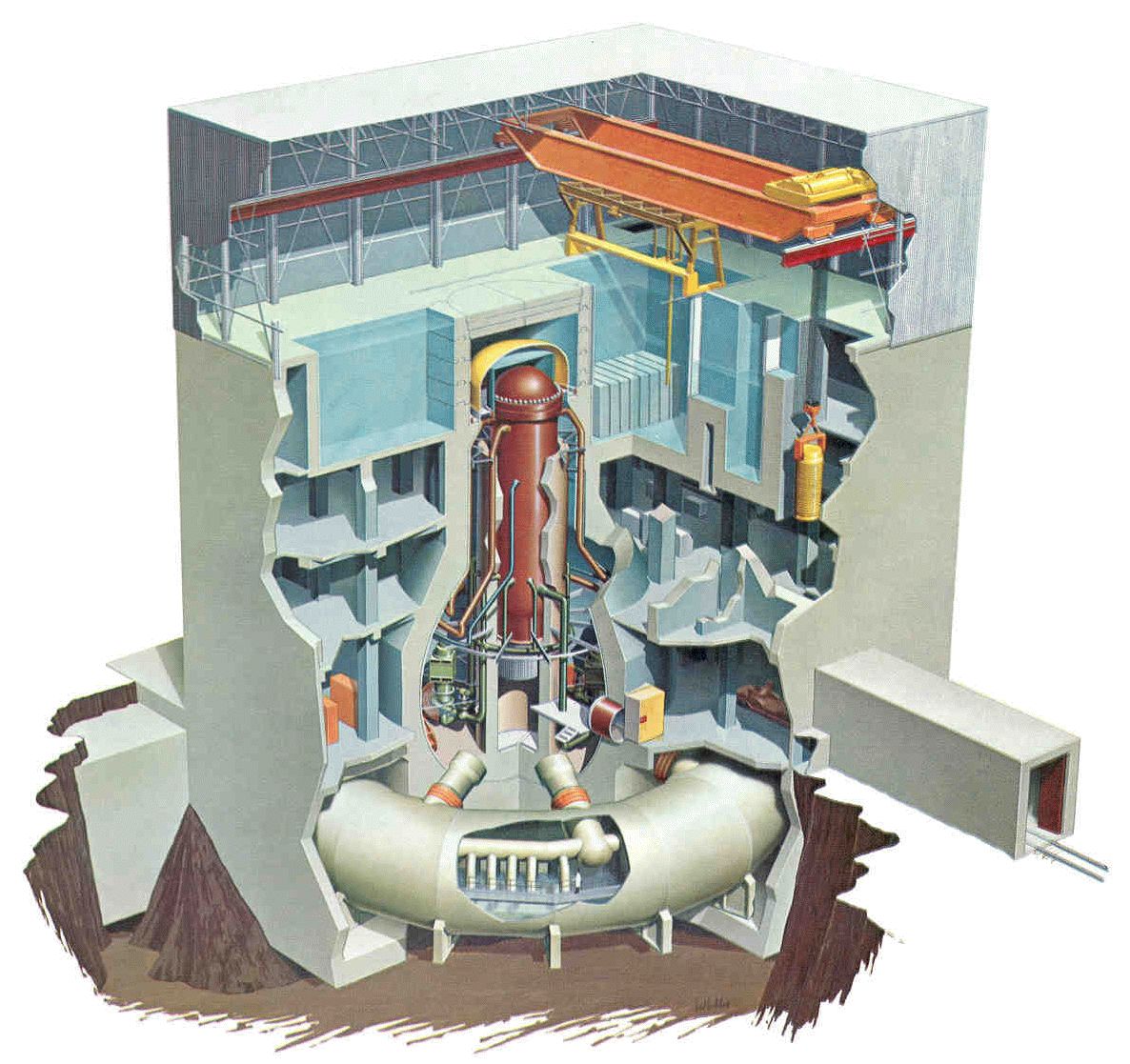 Esta imagem simplificada dá uma idéia geral do design dos blocos da usina nuclear de Fukushima: o reator aqui no centro (marrom) está localizado no centro de um contêiner de concreto em forma de pêra, dentro do qual há muitos equipamentos. No canto superior direito do reator, há uma piscina de retenção, logo abaixo do reator, há uma sala para atuadores de hastes de controle e proteção (ao contrário da PWR, eles são introduzidos no AZ a partir de baixo na BWR ). Abaixo e ao redor do reator, há uma piscina de borbulhador toroidal projetada para condensar o vapor no caso de uma grande ruptura do vaso principal do reator.
Esta imagem simplificada dá uma idéia geral do design dos blocos da usina nuclear de Fukushima: o reator aqui no centro (marrom) está localizado no centro de um contêiner de concreto em forma de pêra, dentro do qual há muitos equipamentos. No canto superior direito do reator, há uma piscina de retenção, logo abaixo do reator, há uma sala para atuadores de hastes de controle e proteção (ao contrário da PWR, eles são introduzidos no AZ a partir de baixo na BWR ). Abaixo e ao redor do reator, há uma piscina de borbulhador toroidal projetada para condensar o vapor no caso de uma grande ruptura do vaso principal do reator.Depois de levar os reatores dos blocos 1,2,3 para o estado de "desligamento a frio" (ou seja, resfriar o combustível irradiado no reator a 100 ° C e abaixo) ao final de 11 anos, as seguintes tarefas foram
formuladas :
- Reconhecimento da situação de radiação em locais de difícil acesso - o vaso do reator, o contêiner, o borbulhador da torre e outros, onde até o final de 2011 a situação ainda não era conhecida (principalmente com os restos do combustível derretido)
- Reduzir a vazão de radioatividade do vento e da água dos reatores - eliminando vazamentos (incluindo a notória parede de gelo), revestindo parte das paredes dos edifícios, coletando lixo contaminado em recipientes onde isso ainda não foi feito
- Preparação de locais para descarga de SNF dos pools de armazenamento de todos os 4 blocos - limpeza de estruturas destruídas, mapeamento de detritos nos pools de armazenamento e sua limpeza, organização de estruturas temporárias acima dos pools e, finalmente, - SNF descarregado em contêineres
- Máxima descontaminação das instalações (isto é, limpeza de contaminantes da superfície. Isso é necessário principalmente no interesse do trabalho de remoção do SNF - para reduzir o nível de dose do pessoal que executará esse trabalho
- Selagem de contêineres de reatores e subsequente bombeamento de água radioativa de edifícios de unidades de energia
- Desmantelamento de resíduos de combustível fundido altamente radioativo (corium) em 1,2,3 blocos
- Após a liberação dos blocos de objetos perigosos nucleares e de radiação - desmontagem e organização da “área verde”
 Infográficos a partir de blocos no início de 2016.
Infográficos a partir de blocos no início de 2016.Todo o plano deve ser implementado em 30 a 40 anos, e o mais difícil aqui é o descarregamento do combustível nuclear usado nos reservatórios cheios de detritos e a remoção de corium dos restos dos vasos do reator. No momento, o SNF está completamente descarregado do bloco 4 (onde, felizmente, não estava no reator, mas apenas na piscina de retenção - ou seja, o bloco 4 pode ser transformado em um gramado verde em breve), e a construção de uma carcaça protetora para descarregar termina. SNF do bloco 3, está planejado para iniciá-lo em 2017.
Com os blocos 1,2, a situação é a mais difícil - aqui, para a construção de um abrigo para limpeza do SNF, é necessário primeiro desmontar os detritos e descontaminar parcialmente para reduzir os campos, que a TEPCO (o proprietário da usina nuclear) está fazendo agora.
 Vista geral do site da central nuclear de Fukushima em 2016. A propósito, há um bom plano explicando todos esses tanques e alguns edifícios.
Vista geral do site da central nuclear de Fukushima em 2016. A propósito, há um bom plano explicando todos esses tanques e alguns edifícios.Portanto, os robôs participam absolutamente de todos os trabalhos descritos acima. Sim, é claro, estas são todas máquinas telecontroladas, principalmente cabos, não vou me aprofundar no debate terminológico aqui, considerarei esses equipamentos como robôs, ou apenas autônomos, e os chamo de robôs.
 O iRobot Packbot 510 é o primeiro dos usados no FAES.
O iRobot Packbot 510 é o primeiro dos usados no FAES.Desde os primeiros dias do acidente, ainda em sua parte ativa, surgiu a questão da inteligência sobre radiação. A TEPCO possuía alguma frota de robôs iRobot Packbot - uma máquina de grande escala, bastante conveniente para esses fins. Eles colocaram dosímetros em pakbots (parece que essa é geralmente uma das opções padrão), câmeras gama, sensores de pressão, temperatura, umidade e os enviaram para os blocos destruídos pelas explosões. Infelizmente, tudo estava ruim com os pakbots enquanto se moviam pelas escadas, e eles realizaram reconhecimento no térreo e fora dos quarteirões.
Treinamento de abril no local do FNPP com o robô guerreiro iRobot.Depois de algum tempo, foram adicionados vários robôs (de design semelhante) desenvolvidos pelo centro FuRO e pela Universidade de Chiba - Quince, Hibiscus, Sakura etc., de acordo com desenvolvedores que têm a melhor inteligência / mecânica quando se deslocam em terrenos difíceis. De fato, esses robôs já em abril-maio de 2011 permitiram explorar os andares superiores dos blocos, dois deles foram perdidos devido a quebras de cabos.
Marmelo no reconhecimento dentro da segunda unidade da central nuclear de Fukushima, abril-julho de 2011.Além disso, pelo menos um drone Honeywell T-HAWK fornecido pelos militares japoneses foi usado para reconhecimento aéreo e vigilância. Os militares e vários outros robôs de esteira do tipo Talon também foram generosos. Esta é uma versão mais pesada e segura da ideologia do Packbot.

Além do reconhecimento, quase instantaneamente, nas primeiras semanas, para a remoção dos escombros, começou o uso de equipamentos de construção telecontrolados - várias escavadeiras, escavadeiras, caminhões, que eliminaram com sucesso as passagens entre os blocos de detritos radioativos.
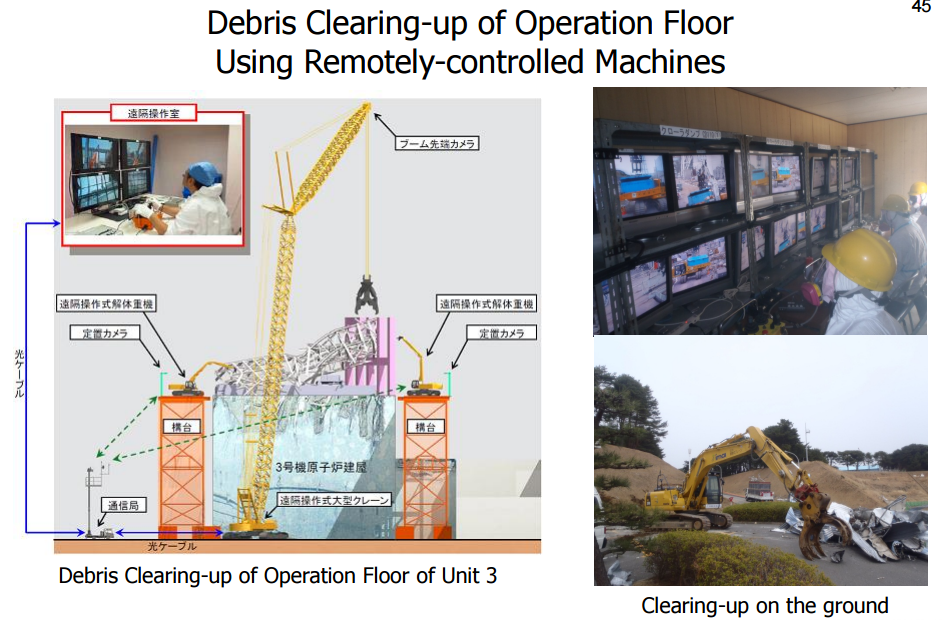
 Robôs usados para a limpeza de resíduos radioativos no bloco 3 em maio-junho de 2011. Incluindo dois tradicionais para a indústria nuclear Brokk'a
Robôs usados para a limpeza de resíduos radioativos no bloco 3 em maio-junho de 2011. Incluindo dois tradicionais para a indústria nuclear Brokk'aUma aplicação interessante foi encontrada para as bombas de concreto robótico Putzmeister - despejando água acima dos blocos e observando a situação de uma lança de 70 metros. O gerenciamento dessas máquinas era realizado por via aérea a partir de salas móveis protegidas com chumbo, instaladas perto do local de trabalho.
 Putzmeister de controle remoto com uma lança de 62 metros, no início de abril de 2011, a tarefa é reconhecimento e fornecimento de água para o topo do bloco destruído.
Putzmeister de controle remoto com uma lança de 62 metros, no início de abril de 2011, a tarefa é reconhecimento e fornecimento de água para o topo do bloco destruído.Acho que o aparecimento instantâneo desses equipamentos no site do FNPP se deve ao fato de que, nos últimos 10 anos, tornou-se popular adicionar a possibilidade de controle externo do controle remoto às máquinas de construção, ou seja, controle essencialmente totalmente eletrônico, o que já é fácil de levar a pelo menos outro hemisfério da Terra. Com essa técnica, basta pendurá-la com câmeras e equipar o canal de telecomunicações correto, e um robô com controle remoto está pronto. Infelizmente, em 1986, para alcançar esse resultado, foi necessário atormentar a nós mesmos e, de fato, o problema não foi resolvido - a velocidade de eliminar as consequências do acidente acabou sendo mais importante do que a carga de dose das pessoas.

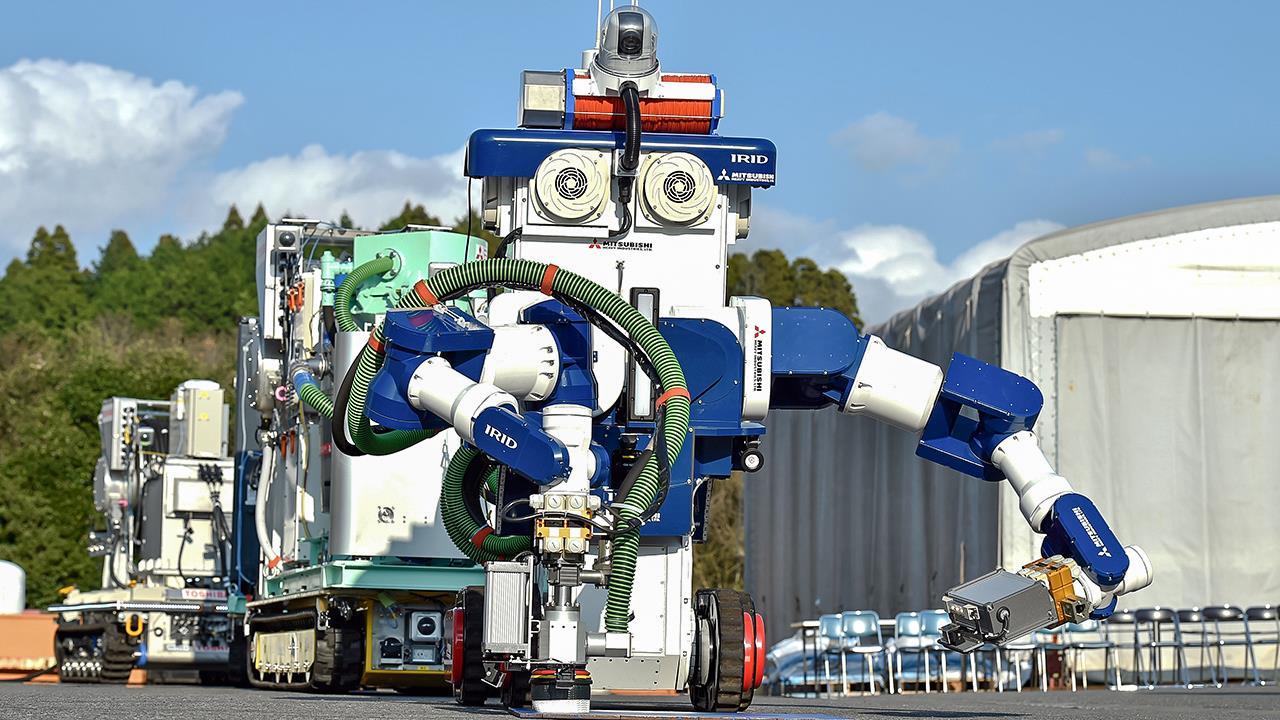
Finalmente, desde 2011, a tecnologia remota resistente à radiação, padrão para a indústria nuclear, também tem sido usada no site da FAES: robôs BROKK pesados (mais de uma tonelada!) E carrinhos móveis Walischmiller - basicamente, novamente, para desmontar resíduos radioativos, trabalhando nos locais mais quentes pontos.
Curiosamente, todo esse equipamento não apresentava problemas específicos associados à radiação - bem, ou estava de alguma forma oculto (o que é duvidoso). No entanto, a robótica desprotegida foi usada em campos baixos (não superior a 15 raios-x por hora) e, para condições mais severas, às vezes a proteção do chumbo era colocada nos eletrônicos (por exemplo, 3 bombas de concreto com controle remoto Putzmeister, que ficavam perto dos blocos destruídos por explosões e derramavam água de cima)
 A situação da radiação em 23/03/2011 - uma semana após o término da fase ativa do acidente. O maior número de 130 mSv é 13 R / h, comparado com ~ 1000 R / h no local de Chernobyl em 6 de maio.
A situação da radiação em 23/03/2011 - uma semana após o término da fase ativa do acidente. O maior número de 130 mSv é 13 R / h, comparado com ~ 1000 R / h no local de Chernobyl em 6 de maio.No entanto, um ponto importante deve ser observado aqui. O equipamento serial ou semi-serial não foi enviado para o vaso do reator ou para o fundo do contêiner, onde campos de até 50.000 r / h foram medidos posteriormente. Para tais tarefas e outras específicas, como descontaminação de grandes volumes, reconhecimento sob a água, remoção de detritos de piscinas de armazenamento de combustível usado, as empresas japonesas lideram desde 2011 o desenvolvimento de uma ampla variedade de mecanismos, muitos dos quais são comissionados apenas hoje. Vamos olhar para eles:
 Pesquisador e FRIGO-MA
Pesquisador e FRIGO-MAVamos começar com uma versão mais compacta da cinemática do Pakbot - o corredor de pesquisas da TOPY. Um robô não muito interessante, no entanto, entrou nos porões dos blocos em 2012. Uma versão ainda menor desse esquema, chamada FRIGO-MA, e um estranho robô quadrúpede da Toshiba que poderia produzir um reconhecimento plano separado, foram usados para controlar o vazamento da tubulação da tubulação do reator (por um bom tempo a tarefa de encontrar locais de vazamento de água de resfriamento foi extremamente importante para os liquidatários).
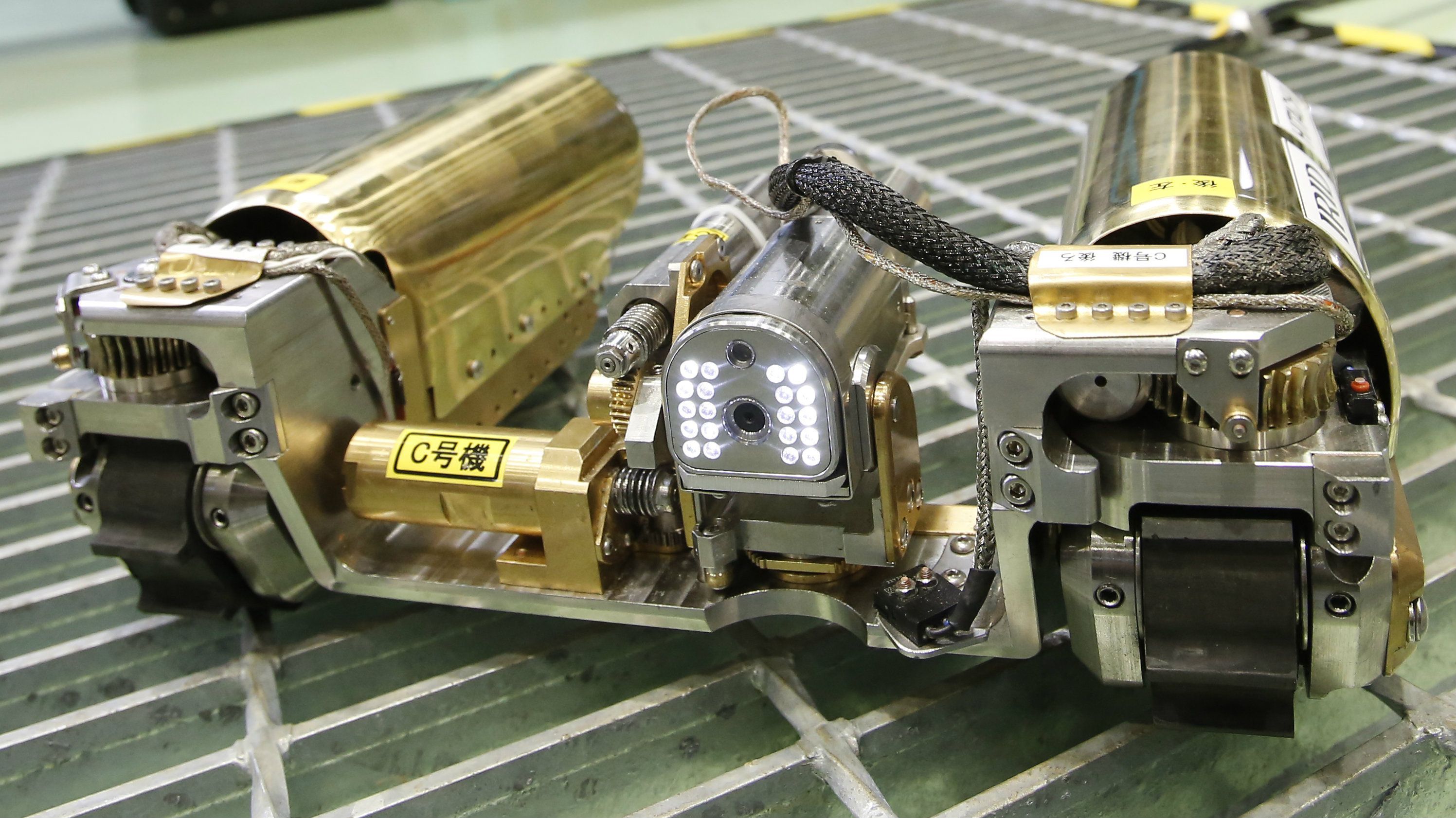
Scorpion, um olheiro ainda menor e mais robusto, desenvolveu a Toshiba - e esse robô entrou em borbulhantes e reatores de contêineres (e parece que um dos escorpiões se tornou o primeiro robô a ser replicado pela mídia).
Testando "Scorpion" no layout do bloco de conteúdo 2. É interessante que muitos modelos foram construídos para enviar robôs, que reproduziam de maneira confiável muitos elementos de projetos de usinas nucleares.A propósito, para a questão dos pequenos olheiros. Gostei da foto desse robô - adivinhe o que é usado como câmera

O rival do Toshiba Scorpion era o Shape-changer da Hitachi, um design bastante impressionante, com cinemática interessante. Dois robôs desta versão foram enviados para a parte inferior do contêiner, realizaram reconhecimento nos campos de ~ 500 r / h (5 Sv / h) e encontraram lá spray de cério.

Foram eles que se tornaram os heróis das notícias do ano passado "A TEPCO enviou robôs para o reator e morreram de radiação" - na verdade, o primeiro robô ficou preso, mas o segundo realmente se deparou com um pedaço de SNF com um campo de 5000-8000 r / h e a eletrônica recusou (a ironia do destino aqui é que o termo "permanecer consciente" em um carro acabou sendo muito semelhante a uma pessoa). A propósito, apesar da morte, esses robôs descobriram uma coisa bastante importante - no contêiner da unidade 1, a água está em um nível bastante alto, o que significa que é estanque.
Vídeo filmado por um desses olheiros.No entanto, diferentemente de uma pessoa, os engenheiros têm a oportunidade, diante de um problema, tentam resolvê-lo inventando uma nova opção. Agora, a Toshiba está testando uma versão do mesmo pequeno escoteiro de Escorpião, equipado com uma micro-ramificação e uma faca para empurrar pedaços de cério. Em geral, os carros novos estão se aproximando cada vez mais da principal área inexplorada - locais de penetração do vaso do reator e do container corium e mapeando a localização do corium sob o reator nos blocos 1,2,3.
No momento, a partir de métodos não remotos, a TEPCO conseguiu abaixar a câmera resistente à radiação no bloco n ° 2 para o córion e medir o DER a 530 Sv / h (ou seja, 53000 r / h). Essa taxa de dose não nos permite esperar que a tarefa de reconhecimento / mapeamento seja simples - os eletrônicos existentes, mesmo resistentes à radiação, se tornam pouco confiáveis nessas condições e é impossível protegê-lo em um pequeno robô.
A propósito, no âmbito do ITER, uma linha de microcircuitos resistentes à radiação (ADCs, DACs, interfaces digitais, lógica) está sendo desenvolvida na Europa para aproximadamente essas condições de trabalho. Outro exemplo de como um projeto "sem valor" traz resultados concretos.
Terminando o tópico do reconhecimento, deve-se mencionar que a TEPCO usou vários robôs subaquáticos autônomos em série e um pequeno barco de controle remoto para o reconhecimento de porões cheios de água.
A segunda tarefa principal do exército de robôs da TEPCO foi e é a análise de bloqueios, principalmente no âmbito da remoção de SNF. Como escrevi acima, inicialmente a FAEC usava produtos padrão BROKK e Walischmiller para a indústria nuclear e equipamentos de construção telecontrolados. No entanto, a Hitachi desenvolveu rapidamente um robô ASTACO-SoRa especial do tipo BROKK (ou seja, robô de esteira pesada com potência autônoma de um motor de combustão interna).
No disfarce de ASTACO-SoRa, há algo nas imagens do anime japonês.Sua tarefa era desmontar detritos de cabos - um objeto complexo para o desmantelamento de armas de robôs padrão, que é freqüentemente encontrado em usinas nucleares. Juntamente com o ASTACO-SoRa especial e os BROKKs resistentes à radiação, foram utilizados os robôs de desmontagem Husqvarna DXR-140, DX-250 e DX-310. Como você não sabia que a husqvarna produz destruidores?
 Aceitação de Husqvarn em 2012 na usina nuclear de Fukushima.
Aceitação de Husqvarn em 2012 na usina nuclear de Fukushima.Por que você precisa desses dispositivos? Deixe-me lembrá-lo que, na estrutura do evento principal de hoje, a extração de combustível nuclear usado nas piscinas de armazenamento, é necessário desmontar os detritos ao redor das piscinas, construir abrigos e geralmente preparar. E não em todos os lugares em que o ambiente de radiação permite que as pessoas façam isso, é compreensível a mudança abundante dessas tarefas para desmontar robôs, embora o ritmo do trabalho esteja caindo fortemente.
 Novamente, nessa tarefa, junto com todo tipo de robôs desajeitados e lentos, os equipamentos de construção telecontrolados.
Novamente, nessa tarefa, junto com todo tipo de robôs desajeitados e lentos, os equipamentos de construção telecontrolados.By the way, sobre o ritmo, uma pequena digressão. Em 1986, os robôs se moviam ainda mais devagar, eram ainda menos precisos e confiáveis, e todos os dias de atraso no armazenamento de combustível nuclear irradiado do teto da unidade nuclear de Chernobyl 4 levavam à remoção adicional de radionuclídeos - pelo vento e pela água. Por isso, tentando concluir as tarefas de limpeza com robôs e certificando-se de que é muito lento, os liquidatários do acidente de Chernobyl voltaram à realização dessa tarefa pelas pessoas. A lentidão e a falta de confiabilidade da robótica se tornaram o principal motivo de seu pequeno uso, e não de radiação e "condições terríveis", como costumam dizer os desenvolvedores desses robôs. Como prova, darei uma parte de um vídeo documentário:
Mas voltando a Fukushima. Juntamente com o desmantelamento de detritos e o envio de resíduos radioativos sólidos para contêineres em blocos contaminados, havia (e existe) outra tarefa desagradável - descontaminação de paredes, pisos, tetos etc. - todos os elementos estruturais que não podem ser simplesmente removidos do local de trabalho futuro. Os radionuclídeos jogados fora durante a fase ativa do acidente se instalaram nessas superfícies - em algum lugar onde eles podem ser lavados e em algum lugar que precisa ser retirado. Uma boa opção é o jateamento de gelo - bombardeio de superfícies com partículas de gelo seco (de CO2), seguido por sucção no filtro de tudo o que aconteceu. No entanto, o próprio sistema para essa limpeza é bastante complicado - para começar, eles tentaram instalá-lo no mesmo Husqvarna DXR-140, com peso de 985 kg, mas o resultado não foi muito bom. Mas estamos no Japão! Pátria de robôs estranhos! E o resultado superou todas as expectativas.
O trem robótico consiste em quatro carrinhos, o primeiro equipado com um manipulador de descontaminação, enquanto o restante carrega um sistema de geração de gelo seco, um aspirador de pó, filtros, vários líquidos de limpeza etc.Em geral, cerca de uma dúzia de mecanismos especializados foram criados para a tarefa de descontaminação, incluindo o mais fácil de limpar o chão e o mais estranho de limpar o teto. Ao mesmo tempo, até onde você pode entender, os resultados de não testes, mas o trabalho real nos blocos ainda são bastante modestos e mais parecidos com os mesmos testes, apenas no mundo real. Inclusive, o trem megarobo mostrado acima ainda não foi lançado em blocos (ao que parece).
Tecnologia de descontaminação - um manipulador montado no final de uma escada retrátil com controle remoto?
Outro exemplo de uma estranha máquina de descontaminação.
Finalmente, a última tarefa mais importante para a qual os japoneses estão projetando robôs com controle remoto é limpar os pools de exposição. Essa tarefa é mais difícil porque aqui, além de estruturas instáveis na água barrenta, é preciso lidar com grandes campos de radiação (especialmente recolhendo lixo de racks com combustível nuclear usado) e o perigo de surtos de uma reação em cadeia - por exemplo, se você deixar cair um conjunto de combustível em outro, é bem possível.
Vídeo filmado por um veículo subaquático na piscina de exposição do terceiro bloco. Sob esse lixo, existem várias centenas de toneladas de combustível usado!Para resolver esse problema, um complexo bastante grande foi criado a partir de um robô telecontrolado subaquático com dois manipuladores suspensos em um guindaste e vários dispositivos de elevação. A TEPCO planeja começar a usar esse complexo já em 2017, ao liberar combustível irradiado na terceira unidade, onde a descarga do SNF deve começar em 2018.
Para resumir, gostaria de observar o seguinte:
1. A liquidação das consequências do acidente na central nuclear de Fukushima tornou-se um local para o uso maciço de equipamentos telecontrolados, principalmente em tarefas de reconhecimento e mapeamento.
2. Os robôs seriais existentes não conseguem lidar com as tarefas de liquidação em si (e reconhecimento em lugares difíceis). Por dois ou três anos após o acidente, muitas novas variantes de equipamentos foram desenvolvidas - é claro que está em andamento uma busca por formulários que sejam bem-sucedidos e eficazes para trabalhar nas condições de acidentes de radiação em instalações industriais. No total, a propósito, contei 43 tipos de carros com controle remoto que se enquadravam nos quadros dos relatórios da TEPCO.
3. O trabalho de máquinas com controle remoto é muito mais lento do que com a ajuda de pessoas.
Esse é um problema bem conhecido e está relacionado à cinemática e à mobilidade defeituosas dos próprios robôs, e à dificuldade de perceber a situação pelo operador através de câmeras separadas: hoje eles estão tentando resolver o segundo problema com a ajuda da realidade aumentada e virtual, mas esses sinos e assobios da moda ainda não chegaram ao FAES ( mas são usados ativamente no desenvolvimento nas universidades).PS Por algum motivo eu não entendo, alguns vídeos não são capturados, se alguém pode aconselhar algo - aconselhar.