
No artigo, consideramos a parte eletrônica do novo quadrocóptero Geoscan Pioneer, projetado para ensinar robótica. Falaremos sobre a criação de um helicóptero, ou melhor, que experiência adquirimos e que mudanças fizemos no projeto. No final, compartilhe planos para o futuro.
1. Por que criar um quadrocopter para treinamento em Geoscan
Para resolver muitos problemas aplicados, veículos aéreos não tripulados (UAVs), em particular, sistemas com vários rotores, são cada vez mais usados. Sua presença pode ser vista em muitas áreas, por exemplo, em fotografia aérea, entrega de carga, gravação de vídeo do ar, monitoramento de objetos, bem como em corridas (drone racing).
No entanto, na indústria em rápido desenvolvimento de aeronaves não tripuladas, há uma escassez de profissionais. A equipe técnica está melhor preparada a partir da escola. Somente todas as etapas do passado: do design à operação e modernização - podem se tornar um verdadeiro profissional em seu campo e dar mais uma rodada no desenvolvimento da indústria, tanto em termos de tecnologia quanto em envolver um número crescente de áreas relacionadas na indústria e resolver um número crescente de problemas aplicados. .
Pode-se argumentar que o uso do quadrocóptero por crianças em idade escolar, estudantes e amadores como um robô voador para aprender o básico do desenvolvimento, operação e modernização dos UAVs é um tópico interessante para nós. Como conseqüência, isso pode levar à criação de uma base para um novo padrão educacional.
Acreditamos que os seguintes tópicos são os mais interessantes para estudar:
Programação de sistemas de controle, criação de algoritmos de orientação e navegação no espaço, reconhecimento do ambiente;
Eletrônica - conectando sensores e estudando os princípios de seu trabalho, estudando a estrutura dos sistemas de aeronaves;
O projeto da estrutura e mecânica, bem como o estudo dos parâmetros eletromecânicos do helicóptero para otimizar os modos de vôo na solução de diferentes problemas;
Controle do helicóptero no modo piloto e no modo de operador de UAV. Ou seja, manual ou automaticamente.
Assim, estão sendo formadas muitas tarefas interessantes que podem ser resolvidas para a geração mais jovem no âmbito dos círculos educacionais, competições e olimpíadas.
Com base no exposto e na experiência existente na criação de UAVs no Geoscan, decidimos colocar essas idéias em prática criando um software e uma plataforma eletrônica.
Vale ressaltar que, para programar simplesmente um robô voador, você precisa de um sistema de navegação. E se na rua esse problema for resolvido pelo uso da navegação por satélite, em ambientes fechados esse problema não terá uma solução clara. Dado que nem sempre é possível trabalhar na rua devido ao clima, terreno circundante ou segurança, a navegação interna está se tornando uma obrigação. Qual sistema de navegação que escolhemos será descrito abaixo.
2. A primeira versão do sistema eletrônico do helicóptero "escolar"
Para criar um helicóptero pequeno, é necessário reduzir ao mínimo a massa e as dimensões da eletrônica. Para fazer isso, é lógico aplicar uma solução de placa única contendo um piloto automático (AP) com sensores, controladores de motor, comunicações por rádio, fontes de alimentação e os conectores necessários. A "placa única" simplifica a combinação de componentes eletrônicos com a estrutura e reduz ao mínimo o número de fios.
Motores sem escova são usados devido a várias vantagens em comparação com motores sem escova. Esses motores são mais eficientes e confiáveis, e o grande torque de peso relativamente leve permite que você abandone o uso de uma caixa de engrenagens no parafuso. Uma certa dificuldade é o desenvolvimento de controladores de velocidade para motores sem escova. Mas, graças à experiência no desenvolvimento de VANTs "adultos", isso não se tornou um grande problema. Das desvantagens do grupo hélice-motor selecionado, apenas o custo de motores e reguladores pode ser observado, mas isso é justificado pelo tempo de voo, boas características de velocidade do helicóptero, capacidade de mover uma carga útil maior e também menos preocupação em comprar e substituir motores com falha.
Assim, abordamos a criação de uma placa protótipo para um pequeno helicóptero. Não prestaremos muita atenção a este fórum, mas apenas observaremos suas principais deficiências, que não são poucas, principalmente devido ao tempo de desenvolvimento muito modesto de três semanas.
No projeto inicial, eu queria experimentar a funcionalidade máxima do helicóptero, para que o magnetômetro e o módulo de navegação por satélite fossem colocados na placa, o que acabou inoperante devido à compatibilidade eletromagnética insuficiente com a placa. O magnetômetro estava muito próximo dos condutores de potência e, quando a corrente passava pelo condutor, o magnetômetro fornecia informações incorretas. Devido à área insuficiente da tela da antena de cerâmica, o receptor GPS encontrou um número insuficiente de satélites para navegação.
Para facilitar a conexão de um quadrocopter a um computador, foi utilizado um modem Wi-Fi. O uso dessa interface para telemetria e controle é problemático se for suposto funcionar em um ambiente barulhento, por exemplo, em exposições ou outros eventos públicos, onde existem muitos dispositivos em 2,4 GHz. Além disso, o módulo mostrou uma operação de rede instável.

Do ponto de vista da operação, tudo também não deu certo. Primeiramente, os fios de fase dos motores precisavam ser soldados à placa, pois não havia conectores para eles. A dificuldade reside na necessidade de ter habilidades para trabalhar com um ferro de solda e na capacidade de misturar a ordem dos fios, o que leva à direção errada da rotação do motor e também complica a desmontagem da montagem. Em segundo lugar, não foi possível fazer furos de montagem convenientes na placa, o que afetou adversamente a confiabilidade e a praticidade de fixar a placa na estrutura. Em terceiro lugar, nem sempre é conveniente usar o conector de interface na forma de "pinos" padrão com um passo de 2 mm ao conectar vários dispositivos.
Entre outras coisas, as dimensões da placa foram maiores que o esperado devido à instalação unilateral de elementos (com exceção de um pequeno número de elementos reguladores na parte inferior).

No entanto, o helicóptero acabou por ser um trabalhador. O piloto automático e os reguladores de firmware foram transferidos de nosso
"grande" helicóptero . Depois de ajustar ligeiramente os coeficientes dos circuitos de controle, fizemos com que o helicóptero fizesse um excelente trabalho com sua principal tarefa - voar. Com motores de 1306 3100 kV, parafusos de 5 "e uma bateria de LiPo 2s de 1300 mAh, o helicóptero voa por 15 a 16 minutos e com a GoPro3 (80 g) - cerca de 10 minutos.
Um vôo foi implementado em um sistema de navegação ultrassônico (EUA) da
Marvelmind . O sistema consiste em dois tipos de sinalizadores ultrassônicos: estacionário e móvel. Ao mesmo tempo, o farol em movimento do sistema montado no helicóptero fornece três coordenadas de posição ao piloto automático com precisão suficientemente baixa (± 5-10 cm) e o sistema de controle que criamos combina esses dados com os dados do giroscópio e acelerômetro e controla a posição espacial do helicóptero.
3. Idéias para criar uma nova versão
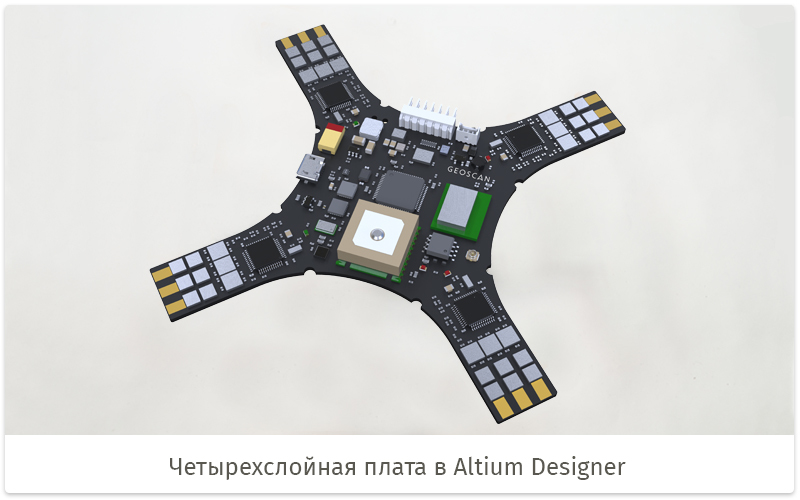
Ao abordar a nova versão do quadro, ficou óbvio para nós que eram necessárias várias melhorias. Nós pensamos sobre o conceito do projeto em mais detalhes, como uma visão completa das áreas e métodos de uso do helicóptero. A idéia principal foi a decisão de deixar apenas os componentes necessários na placa e fazer uma espécie de “placa-mãe”, à qual os módulos que especificam a finalidade funcional do helicóptero serão conectados. Um exemplo desse módulo é um receptor de satélite com uma bússola para navegação nas ruas.
Agora, a nova placa contém o principal controlador de ponto de acesso com sensores - um acelerômetro, um giroscópio e um barômetro. O barômetro é necessário para o modo de espera em altitude, o que simplifica muito o controle do helicóptero com controle manual. Para armazenar registros de voo e parâmetros do piloto automático, usamos um chip de memória flash separado.
Todos os componentes eletrônicos na placa e nos módulos de expansão são alimentados por três conversores de tensão: 5 V (para módulos, LEDs, receptores PPM / SBUS), 3,3 V (para módulos e microcircuitos na placa) e outros 3,3 V separadamente para sensores. A tensão de entrada é de 6 V a 14 V, o que corresponde a uma bateria de polímero de lítio com dois a três "bancos" (2s-3s).

A comunicação com um PC é via canal de rádio ou USB. Para reduzir o tempo de desenvolvimento, usamos o módulo de rádio
Radiocraft de 868 MHz, com potência de 25 mW.
O módulo de rádio é fornecido com uma antena de chip na placa, bem como um conector para conectar uma antena externa. No entanto, para usar o conector da antena externa, é necessário trabalhar com um ferro de soldar. Supõe-se que o usuário do chip tenha antenas de chip suficientes. Para conectar o PC ao helicóptero via rádio, é necessário usar o modem USB recíproco fornecido no kit.

Os LEDs controlados por RGB do WS2812B atuam como indicadores de vários eventos. É possível conectar LEDs adicionais, exceto aqueles na placa.

Os controladores de velocidade do motor são capazes de suportar uma corrente de 20 A e têm a capacidade de frear ativamente, o que afeta positivamente a dinâmica de controle do helicóptero.
A tensão de alimentação encontra-se nas baterias 2s-3s LiPo. Os reguladores são conectados ao AP via UART, e não através de um sinal PWM. Isso tem um bom efeito na imunidade ao ruído. O tamanho dos reguladores é reduzido em comparação com a primeira versão, devido a caixas mais compactas de componentes eletrônicos. Além disso, fizemos a instalação bidirecional de componentes, o que também nos permitiu reduzir o tamanho da placa.

Agora, existem furos de montagem "humanos" na placa para facilitar a montagem na estrutura.
Existem conectores mais úteis. Agora você não precisa soldar os fios dos motores na placa. Os módulos de expansão são conectados através de dois conectores na parte superior da placa, e você não pode confundir a posição do módulo devido ao número diferente de pinos e ao design do próprio conector.
Os conectores TE Micro-MaTch são selecionados para proteção contra danos mecânicos. Ao contrário dos pinos de 2,54 mm, eles não são tão facilmente danificados se forem derrubados ou manuseados incorretamente. Você também pode conectar módulos através de um cabo de extensão para permitir que o módulo seja executado, por exemplo, no helicóptero. As seguintes interfaces estão conectadas a esses conectores: UART, SPI, I2C, vários GPIOs, um sinal para conectar LEDs controlados adicionais e uma fonte de alimentação de 3,3 V e 5 V. O nível lógico das interfaces é de 3,3 V por padrão, mas pode ser alterado para 5 V., se desejado.
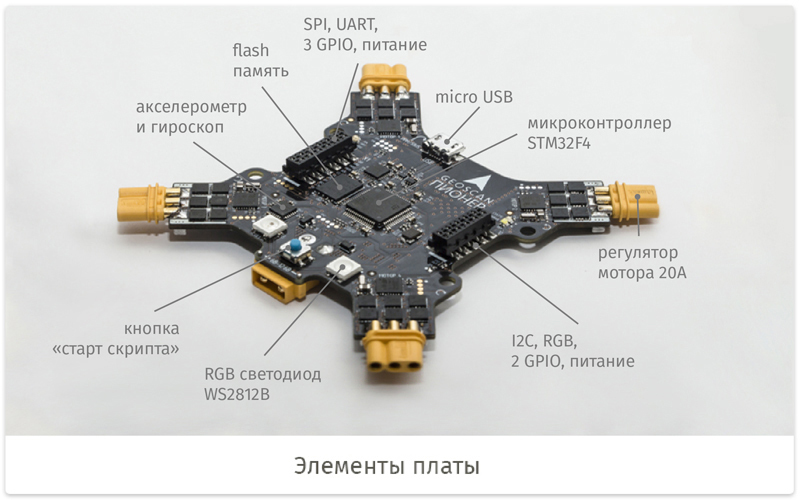
O botão é programado pelo usuário ou usado por padrão para executar o script.
Um pouco sobre o componente de software da plataforma. O firmware do microcontrolador de piloto automático STM32F4 é escrito em C ++ e executado no RTOS
NuttX . O firmware está fechado, mas o usuário pode escrever seu código na linguagem de script
Lua .
Em geral, escolhemos entre várias linguagens de script: Python, JavaScript (
IoT.js ) e Lua. A implementação padrão do Python é difícil de usar no MK, devido ao seu tamanho muito grande. Consideramos a opção com o MicroPython, mas não funcionou devido à possibilidade de acesso direto às instruções do assembler. E não gostaríamos de fornecer acesso a eles para o usuário médio. O JavaScript tem funcionalidade redundante e, para remover o excesso, teria que funcionar. Lua é uma linguagem muito popular, facilmente extensível usando C ++, e possui implementações adequadas para nós.
O script pode conter algoritmos de controle ou apenas uma sequência de ações, recebendo e processando dados de sensores, gerenciamento de carga útil, etc. Em geral, é fornecida uma ampla gama de funções de interação com um robô voador, que pode ser usado para pesquisas, tarefas competitivas ou amadoras. O script pode ser gravado e enviado para o helicóptero usando um aplicativo especial, mas você também pode gerar código usando o
Google Blockly .
Você pode fazer o download do script por um cabo USB ou um canal de rádio. O aplicativo no PC exibe informações de telemetria, que permitem avaliar o status do helicóptero. E, é claro, existem controles e configurações para o robô.
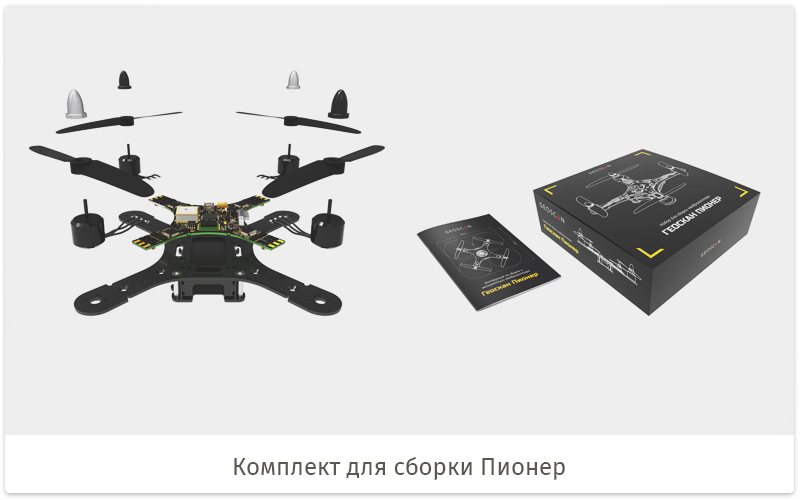
A armação, no momento, é feita de fibra de carbono ou fibra de vidro por fresagem. É montado a partir de um pequeno número de peças e possui um compartimento para bateria.
Opcionalmente, você pode colocar a proteção do chassi e do parafuso. Agora, no desenvolvimento de uma moldura de plástico, que será fabricada com a tecnologia de injeção.

4. Expandimos a funcionalidade com módulos
Como mencionado acima, a placa tem a capacidade de expandir usando plug-ins. Os módulos principais são os seguintes:
O módulo de navegação é um receptor para seu próprio sistema de posicionamento para ultrassom interno.
 Módulo GPS
Módulo GPS - posicionamento por satélite na rua. Ele também possui um magnetômetro a bordo para orientação do percurso.
 Módulo ToF
Módulo ToF - recebe informações de vários sensores de distância
ToF direcionados em diferentes direções, o que permite detectar obstáculos.
 Módulo de carga
Módulo de carga - equipado com captura de carga eletromagnética e LEDs para efeitos de indicação e iluminação.
 O módulo Marvelmind
O módulo Marvelmind é um adaptador para o sistema de posicionamento Marvelmind.
 O módulo OpenMV
O módulo OpenMV é um adaptador para a câmera para visão computacional
OpenMV .
Módulo de sonar - fornece a capacidade de obter altura usando um sensor ultrassônico.
Módulo WiFi - adiciona uma interface WiFi.
Módulo Bluetooth - adiciona uma interface Bluetooth.
Obviamente, muitos outros módulos que planejamos criar no futuro são possíveis.
5. Aplicação prática e planos futuros
Vídeo promocional Geoscan PioneerFizemos várias entregas do Pioneer para várias instituições de ensino. Eles foram feitos com base na primeira versão do quadro, portanto as entregas eram de natureza mais experimental. No entanto, o helicóptero era bastante adequado como projetista de montagem e para o ensino de habilidades de pilotagem.
As competições de pilotos foram realizadas com a participação dos pioneiros em Alferievo durante a conferência
Aeronet 2016 .
Como o robô voador Pioneer atraiu a atenção no festival de robótica
Robofiniste . Há um teste com um voo de oito, que, de fato, o helicóptero lidou com sucesso. O sistema funcionou com base na navegação por ultra-som.

Foi feita uma plataforma com um espaço seguro na forma de um quadro com uma grade, onde todos os visitantes do festival tiveram a oportunidade de controlar o helicóptero. Ao mesmo tempo, o sistema de controle não permitiu tirar o helicóptero da zona permitida.
Hoje, estamos trabalhando na produção dos primeiros lotes de pioneiros, desenvolvendo novos módulos de expansão, projetando uma estrutura plástica para moldagem e concluindo a criação do nosso sistema de navegação por ultrassom. Também está prevista uma apresentação do nosso Pioneer. Você pode descobrir sobre o local e a hora no site da Geoscan.