 Esses três robôs são os antecessores da Astrobee. Eles passaram em alguns testes na ISS, mas não ajudaram uma pessoa.
Esses três robôs são os antecessores da Astrobee. Eles passaram em alguns testes na ISS, mas não ajudaram uma pessoa.A NASA usa robôs na Estação Espacial Internacional desde 2006. Por mais de 10 anos, vários sistemas foram testados na ISS. Um dos projetos mais incomuns foi chamado SPHERES (Posicionamento Sincronizado de Posição, Envolver, Reorientar, Satélites Experimentais). Como parte desse projeto, a NASA testou um trio de robôs que passaram mais de 600 horas na estação. Durante esse período, engenheiros e cientistas puderam realizar um grande número de experimentos, incluindo a interação de robôs em operação, mapeamento e navegação independentes. Ao mesmo tempo, esses robôs não foram projetados para realizar qualquer trabalho prático que pudesse ajudar os astronautas.
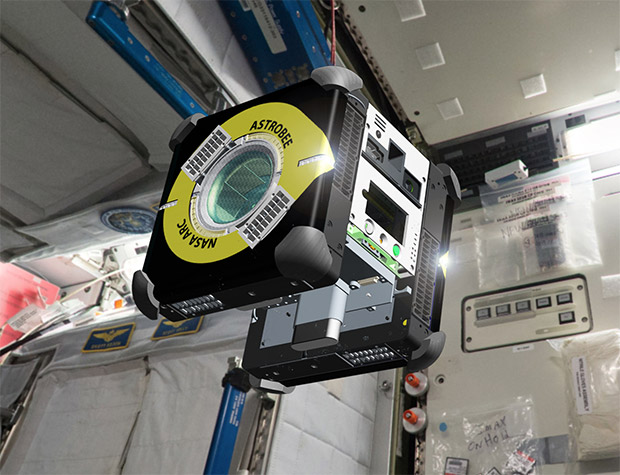
Agora chegou a hora de uma nova geração de robôs que serão capazes de fornecer assistência direta às pessoas a bordo da ISS. Esse robô é o
Astrobee . Ele pode participar de tarefas rotineiras dos astronautas, incluindo analisar a qualidade do ar, determinar níveis de ruído e retransmitir sons de uma estação através de um microfone e câmera. Além disso, o robô está equipado com um scanner RFID, ele pode usar algumas ferramentas, trabalhando com eles usando um pequeno manipulador.
No outono, a NASA mostrou as capacidades de seu robô em um dos
centros de pesquisa da
NASA . Não parece muito impressionante por suas capacidades. De fato, o robô é um cubo com um comprimento de face de 32 centímetros. O corpo é feito de material elástico. O interior é um sistema reativo em miniatura que permite que o robô se mova. Além disso, um grande número de sensores, sistemas de controle, uma tela sensível ao toque e vários conectores gratuitos adicionais para adicionar vários hardwares, incluindo o braço manipulador mencionado acima, são colocados no gabinete.
Para testar as capacidades do sistema reativo do robô, o Astrobee foi colocado em uma doca semelhante a um trenó. Esses trenós, por sua vez, estão localizados em uma das faces de um cubo de granito muito suave. Usando um jato comprimido de dióxido de carbono comprimido, o sistema desliza sem esforço sobre a superfície. Graças a isso, os desenvolvedores podem testar os sistemas de navegação e reativos, ajustando vários elementos, se necessário. No espaço, o robô voará em gravidade zero sem nenhum trenó, movendo-se devido à propulsão a jato.
Os desenvolvedores da NASA afirmam que o Astrobee não é a próxima geração de
robôs SPHERE . De fato, essa é uma plataforma completamente nova, montada do zero e projetada para operação autônoma na ISS. Uma das adições mais visíveis é o sistema de propulsão a jato. Ele "inicia" a partir da corrente elétrica, e o robô pode ser carregado em sua estação. Os robôs SPHERE, por exemplo, também sabiam se mover com o movimento do jato, mas dependiam da carga de suas baterias. Como mencionado acima, quando elementos adicionais são adicionados ao design do robô, ele se torna mais funcional. Os módulos podem ser substituídos por outros, substituindo uma função por outra, se necessário.
A diferença entre o novo robô e seus antecessores pode ser chamada de fato de que SPHERES era completamente dependente do movimento da "carga" disponível de dióxido de carbono. Acreditava-se que eles podem trabalhar não apenas dentro da estação, mas também fora. Astrobee, nesse sentido, é muito diferente de seus "colegas". Só pode se mover em gravidade zero se estiver na atmosfera. O robô não possui carga de dióxido de carbono; portanto, seu sistema reativo usa o ar da estação. Ou seja, não pode sair da ISS.
O sistema de controle por computador do robô captura e lança ar na direção oposta à rota pretendida. Astrobee pode se mover em qualquer direção.
 A fotografia mostra um dos módulos de propulsão a jato Astrobee.
A fotografia mostra um dos módulos de propulsão a jato Astrobee.Atrás da parede protetora de uma das faces do cubo há um ventilador que aspira o ar. Existem outros elementos semelhantes. Seu movimento é projetado para minimizar forças giroscópicas. Este sistema está
constantemente trabalhando , criando uma bolsa de ar comprimido dentro do robô. Ar, se necessário, o movimento do sistema é ejetado de bicos especiais. Eles estão localizados em todas as faces do Astrobee. Se os bicos estiverem fechados, o robô não se moverá. Abrir o bico significa a liberação de ar comprimido e o movimento na direção oposta.
No total, os desenvolvedores forneceram 12 bicos, que são colocados em um pedido especial. Se você usar apenas um bico por unidade de tempo, o cubo em gravidade zero se moverá aleatoriamente. Gerenciar isso será muito difícil. Mas se você trabalhar imediatamente com um par de bicos, o cubo se moverá de maneira equilibrada.
É claro que a presença de um sistema que se move com um jato de ar em um espaço fechado de ar requer o desenvolvimento de medidas especiais de segurança. Se necessário, qualquer um dos astronautas pode pegar o cubo e movê-lo para um local seguro. Além disso, o corpo do robô é coberto com material macio, o que minimiza os possíveis danos causados pelo impacto do robô em qualquer elemento frágil (tela do laptop, etc.).
Quanto às vigias da estação, não há necessidade de temer por elas. Eles consistem em quatro camadas de vidro. Duas camadas são óculos duráveis, cobertos por mais duas camadas de outro tipo de vidro. Agora, a NASA precisa provar que, sob nenhuma circunstância, o robô poderá romper uma das camadas.
Além disso, os desenvolvedores ao criar o Astrobee forneceram total segurança. Em outras palavras, se o software do sistema é “louco”, o sistema inteiro como um todo não deve causar danos críticos à estação. Por exemplo, um bug no software pode fazer com que o robô acelere o máximo possível e passe cerca de 20 metros nesse modo (distância máxima em linha reta ao ISS). Nesse caso, você precisa ter certeza de que, ao atingir qualquer elemento da estação (a mesma janela), isso não causará danos críticos.
Entre os elementos individuais do sistema de propulsão a jato do robô, há um grande número de sensores e outros equipamentos necessários para a operação autônoma. Em particular, ele pode lidar com o movimento de mercadorias. Várias faces do robô foram projetadas para trabalhar com cargas. Devido à presença de um sistema de captura de objetos, o robô pode transportá-lo de uma extremidade da estação para a outra.
O sistema de computador do robô consiste em três níveis: baixo, médio e alto. Os níveis médio e alto são quase idênticos, exceto que o nível médio é baseado no Linux e é responsável pela maioria das funções do robô. Mas o nível superior é executado com base no Android e é responsável por trabalhar com mercadorias e transferi-las de um ponto a outro. Este nível, de acordo com os desenvolvedores, não é muito complicado, então você pode escrever aplicativos para o Android, expandindo a funcionalidade do sistema.
Quanto aos sensores, o Astrobee possui uma câmera de navegação principal com um campo de visão de 116 °. Além disso, os desenvolvedores previram a presença de uma câmera HD com autofoco, capaz de transmitir informações da ISS para a Terra em tempo real. A câmera CamBoard Pico Flexx permite que o dispositivo detecte obstáculos a uma distância de 4 metros. E outro detector óptico determina a velocidade do dispositivo. Se a velocidade for muito alta, vários motores serão desligados para reduzi-la.
Uma das vantagens do Astrobee é que o robô é capaz de se mover autonomamente pela ISS (em qualquer lugar, exceto no segmento russo). Essa é uma conquista significativa de engenheiros e cientistas, já que dentro da ISS há um espaço segmentado, e navegar por um robô não é tão simples. No entanto, ele é organizado de maneira muito racional, para que o robô não precise se esforçar demais para navegar pelos vários compartimentos. Na memória do robô, há um mapa principal, para que em um quadro do ambiente o robô possa entender onde está.
Mas interagir com as pessoas durante o movimento é uma tarefa mais difícil. As pessoas se movem de maneira mais ou menos imprevisível, e o robô não deve colidir com elas no processo de mudança. No processo de trabalho no Astrobee, esse problema também foi resolvido. A propósito, o modo autônomo do robô pode ser desativado e controlado remotamente.
Uma estação de acoplamento foi projetada para o robô carregar as baterias do dispositivo e coletar dados de telemetria.
Como mencionado acima, para executar várias operações para o robô, um manipulador foi criado e impresso em uma impressora 3D. Na maioria das vezes, o manipulador está dobrado, mas, se necessário, pode se decompor. Usando a câmera, o robô reconhece objetos acessíveis que podem ser movidos. Também com a ajuda do manipulador Astrobee é capaz de se mover pelo espaço da estação. Nesse caso, você pode economizar energia da bateria. Se você usar apenas o manipulador e desligar o sistema reativo, o consumo de energia será reduzido em 80%.
A "garra" no final do manipulador é bastante confiável - se o robô tiver consertado com sua ajuda, mas não conseguirá quebrar. Mas, no entanto, se necessário, o astronauta pode remover o robô, a força de compressão é especialmente fornecida a um nível tal que uma pessoa pode facilmente levar até um robô fixo, se algo der errado.
Então, por que é necessário?
A principal tarefa do robô é ajudar os astronautas na execução de várias tarefas de rotina. Independentemente de o robô funcionar offline ou ser controlado remotamente, ele poderá substituir uma pessoa. Por exemplo, instale uma câmera de vídeo, observe o comportamento de vários elementos dentro da estação, monitore a operação da estação e monitore a qualidade do ar. Em particular, é extremamente importante determinar o nível de concentração de dióxido de carbono. Essa análise geralmente é feita, mas os astronautas realmente não gostam desse procedimento monótono. Mas o robô pode substituir a pessoa nisso e analisar o ar sempre que necessário.
 Renderização da aparência do protótipo final do robô
Renderização da aparência do protótipo final do robôEste ano, o robô não funcionará na ISS. A NASA afirma lançar sua estação no ano fiscal de 2018. Três desses robôs serão enviados de uma só vez. Dois realizarão as principais tarefas, e o terceiro serve como complemento. Se algum dos robôs enviados quebrar, ele poderá ser substituído.
Antes que esses robôs cheguem à ISS, seus antecessores, SPHERES, já serão removidos. No passado, os dispositivos se mostravam bem e os dados coletados por eles ajudavam bastante os cientistas no desenvolvimento de um robô de nova geração. Um robô pode aliviar significativamente os membros da equipe da ISS, e três desses robôs removerão completamente algumas das tarefas menores, mas demoradas, dos astronautas.