 O campo magnético gira os parafusos individuais que controlam o movimento dos braços, pernas e cabeça do brinquedo através das cordas
O campo magnético gira os parafusos individuais que controlam o movimento dos braços, pernas e cabeça do brinquedo através das cordasExistem duas maneiras de controlar remotamente o robô. Ou você tenta equipá-lo com um sistema de propulsão autônomo e sistema de navegação (muito difícil), ou você cria um robô muito pequeno que se move em um campo magnético. O robô é controlado por grandes ímãs externos. O controle remoto de tais dispositivos é especialmente requisitado na medicina, principalmente porque dispositivos com tamanho de até
alguns micrômetros estão sujeitos ao controle magnético. Experimentos com
colocação remota de
cateter no coração e controle de uma
sonda de vídeo no trato gastrointestinal já foram concluídos. O enorme potencial das micro-máquinas para fornecer medicamentos a órgãos humanos específicos.
No entanto, muitas aplicações promissoras de controle magnético requerem o trabalho coordenado de não uma, mas de muitos micro-robôs simultaneamente. Até agora, os cientistas conseguiam alcançar apenas o movimento simultâneo de robôs idênticos em um campo homogêneo, mas não participantes arbitrários do enxame. Sim, houve várias experiências no controle individual de robôs de um enxame. Mas em todos os casos, esses robôs devem diferir entre si em propriedades magnéticas ou em design. É por isso que o
trabalho científico dos físicos do laboratório de pesquisa da Philips GmbH Innovative Technologies é muito interessante. Eles aprenderam a torcer o campo magnético em locais arbitrários - e realizaram experimentos com sucesso para apertar e afrouxar parafusos individuais localizados próximos um do outro.
À primeira vista, não está claro como a torção de parafusos arbitrários está associada ao controle de um enxame de robôs no corpo humano. No entanto, se você pensar bem, essas tarefas são muito próximas. Afinal, controlar o campo magnético com tanta precisão permite criar tração magnética em áreas específicas do corpo humano - exatamente onde o dispositivo magnético está localizado, que deve ser acionado.
Apertar parafusos individuais com um campo magnéticoPrincípio de funcionamento
A ilustração abaixo mostra um aplicador de campo com diâmetro de 12 cm. Ele consiste em três pares de bobinas de cobre montadas ao longo de três eixos espaciais e núcleos de ferro cilíndricos para fortalecer o campo ao longo do eixo z. O design é um pouco semelhante em princípio a um dispositivo de imagem por partículas magnéticas (MPI), mas a tarefa oposta é colocada aqui - não detectar a localização de partículas magnéticas com alta precisão, mas controlar esses objetos com a mesma alta precisão.

Se uma corrente da mesma amplitude flui ao longo de duas bobinas, surge um campo espacialmente uniforme ao longo dos eixos, como nos
anéis de Helmholtz . A combinação de três pares de bobinas permite gerar campos dinâmicos uniformes de orientação arbitrária. Se correntes da mesma amplitude fluem em direções opostas, um par de bobinas funciona como uma
bobina de Maxwell , formando um campo gradiente (na ilustração no canto superior direito e na ilustração abaixo).
 Configuração ideal da bobina da Maxwell
Configuração ideal da bobina da MaxwellAo conduzir um experimento conceitual, os cientistas provaram que podem apertar os parafusos localizados literalmente em locais arbitrários dentro do gerador de campo.
A ilustração mostra como a direção do vetor de magnetização é calculada e o torque é gerado. A física permite que você aperte / desaparafuse todos os parafusos ao mesmo tempo ou cada parafuso individualmente.
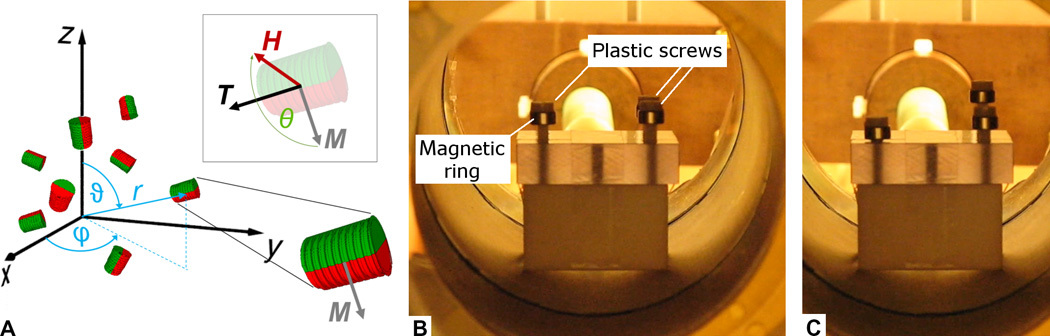
Os cientistas acreditam que o dispositivo desenvolvido já pode ser usado em medicina. Por exemplo, para apertar e desapertar os parafusos que são colocados dentro de cápsulas ou implantes firmemente fixados aos tecidos circundantes do corpo humano. Se a cápsula estiver bloqueada, ela não girará com o parafuso. Além disso, a força de fixação da cápsula pode ser tão alta que permitirá que você parafuse parafusos ou parafusos diretamente nos tecidos do corpo humano. Por exemplo, no osso.
Talvez torcer o dispositivo com um campo magnético possa ser aplicável ao movimento de microrobôs em fluidos corporais. Nesse caso, os médicos receberão o controle seletivo muito necessário de um enxame de microrobôs no corpo humano.
Além disso, máquinas mais complexas no corpo humano podem ser controladas girando parafusos de controle individuais, como mostrado no KDPV usando o brinquedo Lego como exemplo (ilustração de um artigo científico). Pode ser alguns implantes complexos dentro do corpo. Talvez em ortopedia, o formato dos implantes seja ajustado sem a necessidade de usar motores ou instalar baterias dentro do dispositivo. Os cientistas sugerem o uso prático da rotação remota dos parafusos nos dispositivos para alongamento dos membros, no controle de microbombas, na liberação remota de medicamentos e na introdução precisa de grãos radioativos do tipo
103 Pd em tumores cancerígenos (radioterapia de contato).
O artigo científico foi
publicado em 15 de fevereiro de 2017 na revista
Science Robotics (doi: 10.1126 / scirobotics.aal2845).