Quadrocopter no MultiWii SE v2.5 - do conceito ao primeiro voo
Há algum tempo, tropeçando na Internet com artigos e vídeos sobre helicópteros, pensei que era difícil e não acessível a todos. Mas o desejo de se tornar um guia de vôo foi grande e, depois de estudar a massa de material sobre esse tópico, ele concluiu por si mesmo que não era necessário comprar uma versão finalizada para a construção de um quadrocóptero, ou seja, construir do zero e ele próprio. Agora, quero compartilhar com você minha experiência na construção de um quadrocopter no MultiWii SE v2.5. No artigo, tentarei descrever em detalhes todo o processo de construção de um quadrocóptero do zero ao primeiro voo para um iniciante absoluto neste tópico, que ele próprio era há algum tempo.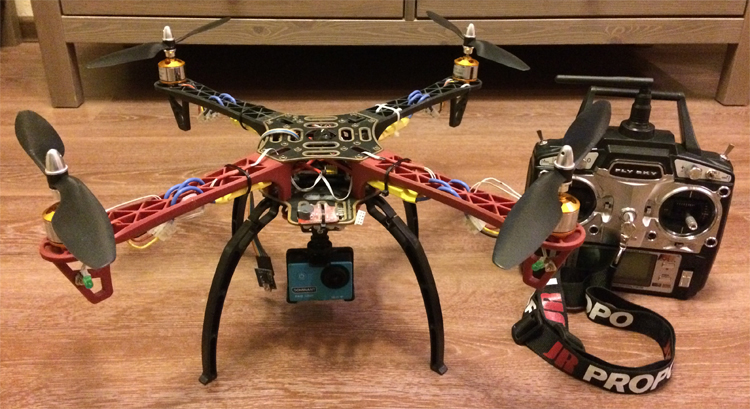 Um pouco de teoria sobre voar em umhelicóptero quadcopter , coletaremos em um quadro clássico do formato "X". Gerenciar um helicóptero não é tão fácil quanto parece à primeira vista, não tem frente e traseira como nos carros controlados por rádio. Com o comando "forward", o quadrocopter não voa para onde o piloto está olhando, mas para onde o nariz do quadrocopter é direcionado (há uma seta correspondente no controlador de vôo), esse é um grande perigo para iniciantes, porque do solo, pode ser difícil determinar onde está o nariz do helicóptero; portanto, ao montá-lo, é necessário marcá-lo de alguma forma, por exemplo, com raios de uma cor diferente ou colocando LEDs. Controlar o helicóptero, ou seja, Para determinar e definir sua orientação no espaço, inclinaremos, rolaremos e guinamos os ângulos + subiremos. O vôo do helicóptero na direção necessária é obtido alterando esses três ângulos. Por exemplo, para voar para frente, o helicóptero deve dobrar o nariz no chão (inclinação).
Um pouco de teoria sobre voar em umhelicóptero quadcopter , coletaremos em um quadro clássico do formato "X". Gerenciar um helicóptero não é tão fácil quanto parece à primeira vista, não tem frente e traseira como nos carros controlados por rádio. Com o comando "forward", o quadrocopter não voa para onde o piloto está olhando, mas para onde o nariz do quadrocopter é direcionado (há uma seta correspondente no controlador de vôo), esse é um grande perigo para iniciantes, porque do solo, pode ser difícil determinar onde está o nariz do helicóptero; portanto, ao montá-lo, é necessário marcá-lo de alguma forma, por exemplo, com raios de uma cor diferente ou colocando LEDs. Controlar o helicóptero, ou seja, Para determinar e definir sua orientação no espaço, inclinaremos, rolaremos e guinamos os ângulos + subiremos. O vôo do helicóptero na direção necessária é obtido alterando esses três ângulos. Por exemplo, para voar para frente, o helicóptero deve dobrar o nariz no chão (inclinação).
Regulador de pressão - gás, subida
Aileron - roll, aileron (roll)
Elevador - elevador, pitch (pitch)
Leme - leme, yaw (yaw)
Motores:
LFW - frente esquerda, rotação no sentido horário
RFC - frente direita, rotação
LBC no sentido anti-horário - traseira esquerda, rotação no sentido anti-horário
RBW - traseira direita, rotação no sentido horário
 Componentes necessários:
Componentes necessários:Controlador de vôo CRIUS MultiWii SE v2.5 FTDI
Quadro do
programador Motores HJ450 2212-1000KV - 4 unid. Controladores de velocidade ESC 30A - 4pcs. Bateria 11.1V 2200Mah 3S 40C Li-Po ( exemplo ) Carregamento da bateria B3 AC 2S-3S 7.4V 11.1V Li-Po Balanceador de bateria
Fio para a bateria Plugue T Grampos de plástico Equipamento de controle FlySky FS-T6 2.4G 6CH completo com receptor Hélices 1045 (10x4,5) CW / CCW - 2 un. rotação no sentido horário + 2pcs. rotação no sentido anti-horário; tomar mais hélices, porque enquanto aprendem a controlar um helicóptero, quando caem, eles quebram uma vez
Opcionalmente:Pés para aterrissagem
Testador de bateria Testador de indicador de tensão da bateria Li-Po Baixa tensão (sinalizará quando a bateria estiver descarregada)
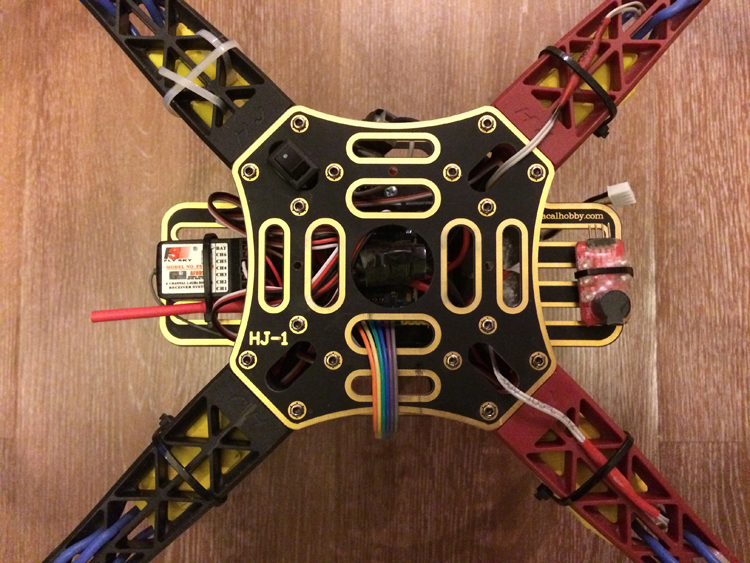
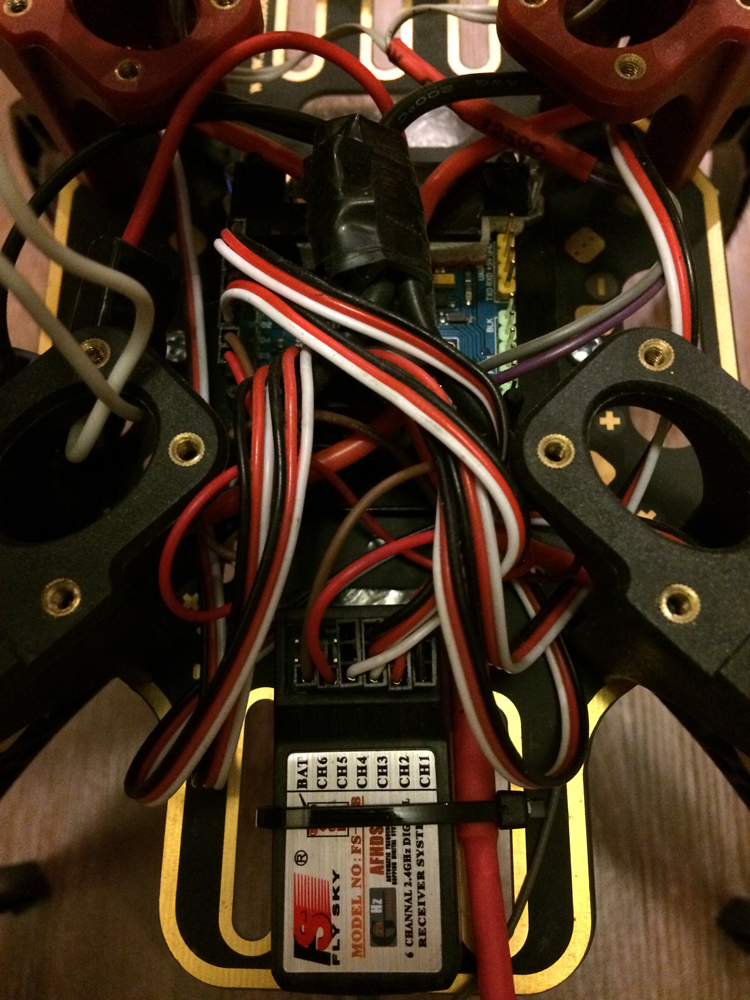
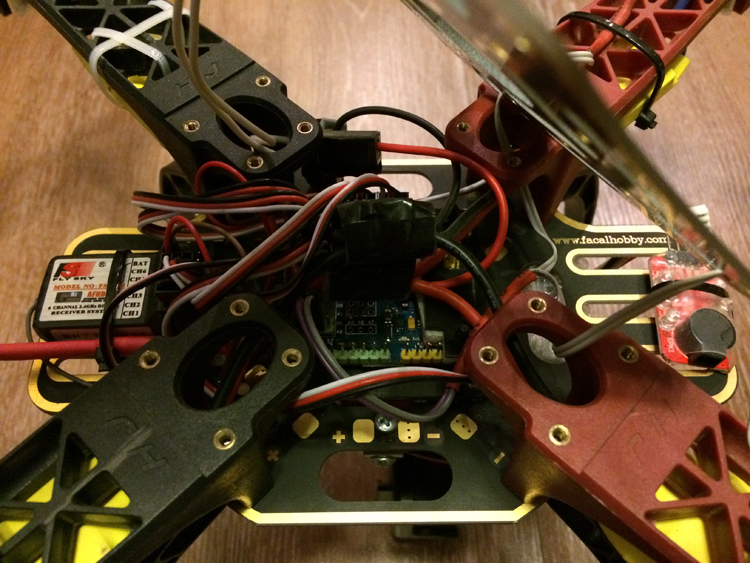
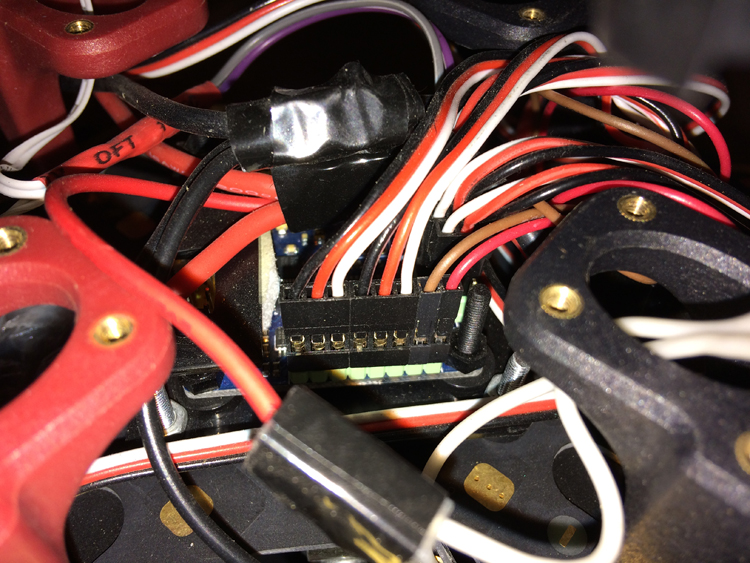
Diagrama de montagem: Antes da montagem, é necessário calibrar os controladores ESC, o processo é o seguinte: conectamos o motor ao regulador, conectamos o regulador ao canal de gás no receptor (CH3) e ao acumulador, elevamos o manípulo do gás no equipamento de controle até a parada, ligamos o appu - é emitido um som característico manete do acelerador até a parada - um som característico é emitido e, em seguida, teste - levante / abaixe o manete do acelerador - verifique a operação, desligue o appu - o regulador está calibrado; Usando essa analogia, calibre todos os ESCs ( vídeo adequado para maior clareza).Montamos o quadro, instalamos o MultiWii, montamos os motores, conectamos os controladores ESC: aos motores, ao MultiWii e ao acumulador (conectamos os "prós e contras" dos reguladores e os conectamos às baterias "+" e "-", respectivamente). Atenção, para alterar a direção de rotação do motor, basta trocar dois fios dos três que vêm do motor para o ESC. É desejável instalar o MultiWii no quadro através da plataforma (eu mesmo fiz , mas você pode comprá-lo) para evitar curtos-circuitos no gabinete e obter precisão dos dados; Também fiz uma pequena “fazenda coletiva” para o barômetro - fechei com espuma de borracha para reduzir o erro nos dados.Canais adicionais CH5 e CH6 podem ser usados para ativar funções: mantenha a altura, volte para casa, controle o cardan da câmera etc., você pode ler mais neste artigo . Meus diodos estão conectados a "+" e "-" em A2. O programador FTDI está conectado ao conector FTDI correspondente na placa.
Antes da montagem, é necessário calibrar os controladores ESC, o processo é o seguinte: conectamos o motor ao regulador, conectamos o regulador ao canal de gás no receptor (CH3) e ao acumulador, elevamos o manípulo do gás no equipamento de controle até a parada, ligamos o appu - é emitido um som característico manete do acelerador até a parada - um som característico é emitido e, em seguida, teste - levante / abaixe o manete do acelerador - verifique a operação, desligue o appu - o regulador está calibrado; Usando essa analogia, calibre todos os ESCs ( vídeo adequado para maior clareza).Montamos o quadro, instalamos o MultiWii, montamos os motores, conectamos os controladores ESC: aos motores, ao MultiWii e ao acumulador (conectamos os "prós e contras" dos reguladores e os conectamos às baterias "+" e "-", respectivamente). Atenção, para alterar a direção de rotação do motor, basta trocar dois fios dos três que vêm do motor para o ESC. É desejável instalar o MultiWii no quadro através da plataforma (eu mesmo fiz , mas você pode comprá-lo) para evitar curtos-circuitos no gabinete e obter precisão dos dados; Também fiz uma pequena “fazenda coletiva” para o barômetro - fechei com espuma de borracha para reduzir o erro nos dados.Canais adicionais CH5 e CH6 podem ser usados para ativar funções: mantenha a altura, volte para casa, controle o cardan da câmera etc., você pode ler mais neste artigo . Meus diodos estão conectados a "+" e "-" em A2. O programador FTDI está conectado ao conector FTDI correspondente na placa.




 Depois de montar e conectar tudo, é necessário preencher o firmware no MultiWii, fazer isso através do programa IDE do Arduino (você pode baixar a versão atual aqui) Conectamos o MultiWii ao PC através do programador FTDI, iniciamos o Arduino IDE, selecionamos a porta COM à qual a placa está conectada no menu, também selecionamos o tipo de placa no menu, abrimos o firmware (link no final do artigo), abrimos o arquivo MultiWii.ino, você verá acima Em várias guias, estaremos interessados apenas em config.h, nele precisamos configurar o firmware - dependendo das configurações necessárias, você deve descomentar (excluir “//”) uma das linhas da seção desejada (link para o arquivo config.h com minhas configurações no final artigo), após a instalação, preencha o firmware no MultiWii.Agora precisamos continuar configurando o helicóptero por meio da GUI, para isso usaremos o programa MultiWiiConf (link no final do artigo). Conectamos o MultiWii ao PC através do programador FTDI, lançamos o MultiWiiConf, selecionamos a porta COM à qual a placa está conectada no menu, pressione o botão START (os valores devem aparecer no gráfico), antes de editar os parâmetros - pressione READ, para salvar os parâmetros - pressione WRITE. Depois de selecionar a porta e pressionar INICIAR (você verá que o gráfico ganhou vida, os dados estão chegando), é necessário calibrar os sensores: para calibrar o acelerômetro, defina o helicóptero paralelo ao horizonte e pressione o botão CALIB_ACC, a GUI congelará por um tempo e verifique se os eixos ROLL e PITCH estão paralelos ;para calibrar o magnetômetro (bússola) - pressione o botão CALIB_MAG e gire o helicóptero em todos os eixos ou coloque-o alternadamente nas nervuras por 30 segundos. Além disso, após conectar com sucesso o programa configurador ao seu helicóptero, no canto superior direito, você verá barras azuis mostrando os canais do seu controle remoto, mova os manípulos para garantir que tudo funcione corretamente. O stick na posição min deve mostrar um valor de 1000, no centro de 1500 e no máximo de 2000; caso contrário, apare o controle remoto de acordo com as instruções (link no final do artigo). Lembre-se de que as tiras devem se mover de acordo com os movimentos dos paus, ou seja, se você aumentar a alavanca do acelerador, a faixa deverá subir (da mesma forma para outros canais); caso contrário, inverta os canais do seu controle remoto. Também na GUI, você pode definir as funções a serem adicionadas. canaispor exemplo, retenção de altitude (BARO). A função de alinhamento horizontal (LEVEL) deve sempre estar ativada! Aqui está um adequadovídeo para maior clareza do programa MultiWiiConf.Algumas digressões sobre o tópicoNão espere que a função mantenha a altura (BARO) de pairar bastante em um ponto, como um barômetro é usado para isso - o helicóptero certamente tentará manter a altitude em que você ativou a função, mas nadará dentro de um raio de ± alguns metros, apenas pela precisão dos dados do barômetro e para protegê-lo de influências externas, fiz uma “fazenda coletiva” com espuma de borracha. Lembre-se de que a retenção da altitude deve ser ativada no gás suspenso, ou seja, depois, quando você usa o manípulo de gás para garantir que o helicóptero ± seja mantido na mesma altura e não é aconselhável tocar no gás depois de ativar a função. Para pairar com mais precisão em um ponto - é melhor usar o módulo GPS opcional.A função de retenção de curso (MAG) é muito caprichosa e seu uso para mim terminou deploravelmente, após a ativação e a decolagem, o helicóptero começou a girar como um pião e rapidamente voou para longe de mim, tentativas de determinar o nariz do helicóptero e devolvê-lo ao curso não tiveram êxito, não tive escolha como jogar gás e correr em direção a um ponto que cai do céu. Aqui está um pequeno vídeo e foto após o outono. Talvez esse comportamento tenha sido causado por uma bússola incorretamente calibrada ou por uma interferência magnética ou outra coisa; em geral, leia as informações na Internet antes de usar e tenha cuidado.Para o futuro, pode ser útil não levar consigo um laptop com o programa MultiWiiConf em vôos - você pode conectar o módulo Bluetooth HC-05 ao controlador MultiWii (conecta-se ao conector UART) e por aplicativos Android ( MultiWii Configuration e EZ-GUI Ground Station ) via Bluetooth se conecta ao helicóptero e faça as configurações necessárias, semelhantes às do MultiWiiConf.O procedimento para dar partida nos motores é o seguinte: ligue o helicóptero (rangido), ligue o aplicativo, pegue o manete de gás da posição inferior para a direita - os motores iniciam (alimentam) e giram em marcha lenta, agora para retirar sem problemas o gás; para parar os motores, retire o manípulo do acelerador da posição inferior para a esquerda - os motores pararam, desligue o helicóptero, desligue o aplicativo.É isso, espero que meu artigo seja útil para você, mas agora você pode instalar hélices e avançar, no nosso caso, boa sorte e menos quedas.Um pequeno vídeo dos meus voosLinks para download:Archive - firmware MultiWii + programa MultiWiiConfArquivo config.h com minhas configuraçõesManual do FlySky FS-T6PS - continue aqui: “Instale FPV e telemetria em um quadrocopter”
Depois de montar e conectar tudo, é necessário preencher o firmware no MultiWii, fazer isso através do programa IDE do Arduino (você pode baixar a versão atual aqui) Conectamos o MultiWii ao PC através do programador FTDI, iniciamos o Arduino IDE, selecionamos a porta COM à qual a placa está conectada no menu, também selecionamos o tipo de placa no menu, abrimos o firmware (link no final do artigo), abrimos o arquivo MultiWii.ino, você verá acima Em várias guias, estaremos interessados apenas em config.h, nele precisamos configurar o firmware - dependendo das configurações necessárias, você deve descomentar (excluir “//”) uma das linhas da seção desejada (link para o arquivo config.h com minhas configurações no final artigo), após a instalação, preencha o firmware no MultiWii.Agora precisamos continuar configurando o helicóptero por meio da GUI, para isso usaremos o programa MultiWiiConf (link no final do artigo). Conectamos o MultiWii ao PC através do programador FTDI, lançamos o MultiWiiConf, selecionamos a porta COM à qual a placa está conectada no menu, pressione o botão START (os valores devem aparecer no gráfico), antes de editar os parâmetros - pressione READ, para salvar os parâmetros - pressione WRITE. Depois de selecionar a porta e pressionar INICIAR (você verá que o gráfico ganhou vida, os dados estão chegando), é necessário calibrar os sensores: para calibrar o acelerômetro, defina o helicóptero paralelo ao horizonte e pressione o botão CALIB_ACC, a GUI congelará por um tempo e verifique se os eixos ROLL e PITCH estão paralelos ;para calibrar o magnetômetro (bússola) - pressione o botão CALIB_MAG e gire o helicóptero em todos os eixos ou coloque-o alternadamente nas nervuras por 30 segundos. Além disso, após conectar com sucesso o programa configurador ao seu helicóptero, no canto superior direito, você verá barras azuis mostrando os canais do seu controle remoto, mova os manípulos para garantir que tudo funcione corretamente. O stick na posição min deve mostrar um valor de 1000, no centro de 1500 e no máximo de 2000; caso contrário, apare o controle remoto de acordo com as instruções (link no final do artigo). Lembre-se de que as tiras devem se mover de acordo com os movimentos dos paus, ou seja, se você aumentar a alavanca do acelerador, a faixa deverá subir (da mesma forma para outros canais); caso contrário, inverta os canais do seu controle remoto. Também na GUI, você pode definir as funções a serem adicionadas. canaispor exemplo, retenção de altitude (BARO). A função de alinhamento horizontal (LEVEL) deve sempre estar ativada! Aqui está um adequadovídeo para maior clareza do programa MultiWiiConf.Algumas digressões sobre o tópicoNão espere que a função mantenha a altura (BARO) de pairar bastante em um ponto, como um barômetro é usado para isso - o helicóptero certamente tentará manter a altitude em que você ativou a função, mas nadará dentro de um raio de ± alguns metros, apenas pela precisão dos dados do barômetro e para protegê-lo de influências externas, fiz uma “fazenda coletiva” com espuma de borracha. Lembre-se de que a retenção da altitude deve ser ativada no gás suspenso, ou seja, depois, quando você usa o manípulo de gás para garantir que o helicóptero ± seja mantido na mesma altura e não é aconselhável tocar no gás depois de ativar a função. Para pairar com mais precisão em um ponto - é melhor usar o módulo GPS opcional.A função de retenção de curso (MAG) é muito caprichosa e seu uso para mim terminou deploravelmente, após a ativação e a decolagem, o helicóptero começou a girar como um pião e rapidamente voou para longe de mim, tentativas de determinar o nariz do helicóptero e devolvê-lo ao curso não tiveram êxito, não tive escolha como jogar gás e correr em direção a um ponto que cai do céu. Aqui está um pequeno vídeo e foto após o outono. Talvez esse comportamento tenha sido causado por uma bússola incorretamente calibrada ou por uma interferência magnética ou outra coisa; em geral, leia as informações na Internet antes de usar e tenha cuidado.Para o futuro, pode ser útil não levar consigo um laptop com o programa MultiWiiConf em vôos - você pode conectar o módulo Bluetooth HC-05 ao controlador MultiWii (conecta-se ao conector UART) e por aplicativos Android ( MultiWii Configuration e EZ-GUI Ground Station ) via Bluetooth se conecta ao helicóptero e faça as configurações necessárias, semelhantes às do MultiWiiConf.O procedimento para dar partida nos motores é o seguinte: ligue o helicóptero (rangido), ligue o aplicativo, pegue o manete de gás da posição inferior para a direita - os motores iniciam (alimentam) e giram em marcha lenta, agora para retirar sem problemas o gás; para parar os motores, retire o manípulo do acelerador da posição inferior para a esquerda - os motores pararam, desligue o helicóptero, desligue o aplicativo.É isso, espero que meu artigo seja útil para você, mas agora você pode instalar hélices e avançar, no nosso caso, boa sorte e menos quedas.Um pequeno vídeo dos meus voosLinks para download:Archive - firmware MultiWii + programa MultiWiiConfArquivo config.h com minhas configuraçõesManual do FlySky FS-T6PS - continue aqui: “Instale FPV e telemetria em um quadrocopter” Source: https://habr.com/ru/post/pt401789/
All Articles