O principal objetivo do módulo é controlar
motores sem escova síncronos (BLDC, BLAC, PMSM ...) com uma
forma de tensão
trapezoidal ou
sinusoidal ,
com sensores de posição de velocidade ou
sem sensores . Além disso, o módulo possui pequenas dimensões, uma ampla gama de tensões de alimentação, uma variedade de canais de depuração, comunicações com e sem fio.
A potência dos motores controlados pelo módulo pode estar dentro de algumas centenas de watts e tensão de até 30V. São motores de vários mecanismos e dispositivos, tais como: impressoras 3D, portas automáticas, persianas automáticas, bombas independentes, ventiladores, travas, ferramentas elétricas, estabilizadores, motores e servomecanismos de modelos RC, robôs, etc.
Mas isso não se limita ao uso do módulo. Ele pode ser usado com pequenas adições para controlar solenóides, motores de passo, para controlar a iluminação, como um carregador poderoso, como um regulador de tensão, como uma fonte poderosa de sinais de áudio, como um switch de alto amplificador com um medidor de corrente e simplesmente como uma plataforma de depuração.
Em uma palavra, esse módulo na casa de um engenheiro pode ser muito útil.
Todas essas propriedades do módulo são obtidas graças ao circuito de meia ponte trifásico clássico com sensores de corrente e tensão e um potente microcontrolador.
(Clique para ampliar)Para acelerar o processo de desenvolvimento do circuito da unidade de energia, um dos projetos padrão propostos pela TI foi tomado como base.
Decidi sobre o design da
placa TIDA-00901 .
(Clique para ampliar)A placa possui boas características: corrente de até 20 A, potência do motor de 200 W, tensão nominal de 12 V. Projetado para operação em carro.
Como driver de teclas de força, o chip
DRV8305 é
usado . Algumas pesquisas levaram à conclusão de que este é um dos melhores chips de driver para tais aplicações.
Um documento de desenvolvimento muito útil é o
projeto de referência para acionamentos de motores automotivos BLDC de 12 V 200 W (20 A) .
A placa possui um formato redondo específico, o controlador C2000 LaunchPad é usado como um elemento de controle. Infelizmente, o software não está totalmente aberto com relação às bibliotecas de controle do motor. O C2000 LaunchPad é baseado na família de processadores DSP F2802x Piccolo. Essa família de processadores é especializada no desenvolvimento de conversores simples de energia e não difere em grande universalidade e recursos.
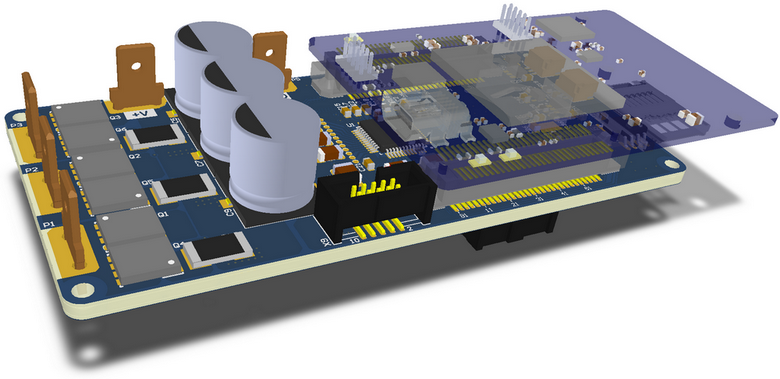
Arquitetura de módulos.
Neste projeto, decidiu-se executar o módulo na forma de uma estrutura composta de 2 placas. A placa principal contém um driver de energia, um subsistema de energia e algumas funções periféricas. A placa do processador está instalada na placa principal. Como processador selecionado
Placa do projeto
K66BLEZ1 (mais artigos sobre esse projeto -
1 ,
2 ,
3 ,
4 ) com um microcontrolador da família NXP
Kinetis baseado no
núcleo ARM Cortex-M4 . (
180 MHz, 2 MB de memória Flash, 256 KB de RAM + cartão micro SD, relógio em tempo real com alimentação própria, dispositivo USB / host de alta velocidade, chip Bluetooth LE 4 / ZigBee separado )
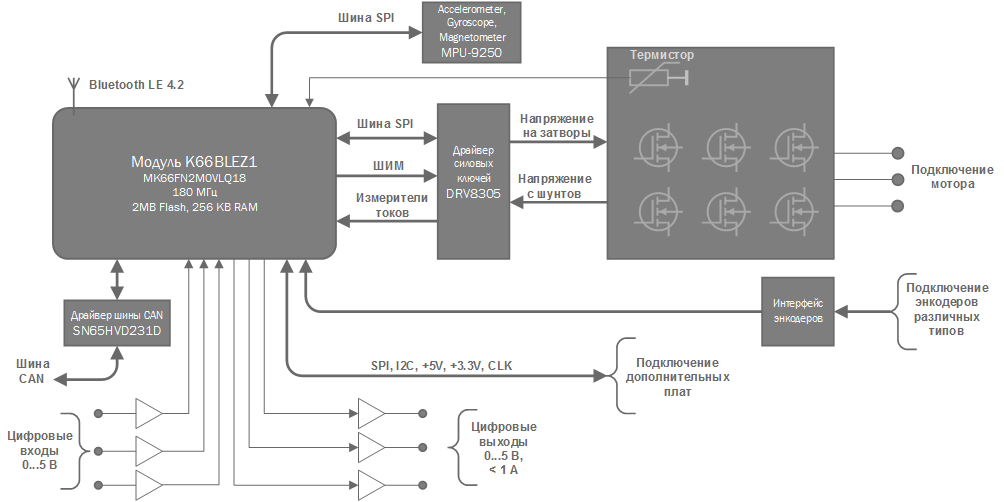
(Clique para ampliar)O módulo é alimentado na faixa de tensão
de 8,5 a 30 V. Vários sensores de temperatura - no microcontrolador, os interruptores próximos e um externo protegem o módulo e o motor de superaquecimento perigoso. Toda a base elementar é selecionada para operação em
temperaturas de até -40 graus. SAs teclas de energia para controlar o motor foram projetadas para
uma corrente de pulso de até 200 A. A medição de corrente é realizada por desvios resistivos com uma resistência de 0,001 Ohms. Graças aos amplificadores ajustáveis integrados no chip do driver DRV8305, o módulo é capaz de
medir correntes de 300 A a 0,1 A.O barramento CAN torna possível integrar muitos desses módulos em uma rede sincronizada comum.
O chip
MPU-9250 é útil se você precisar controlar a orientação do módulo no espaço e na navegação inercial, além de monitorar vibrações e choques.
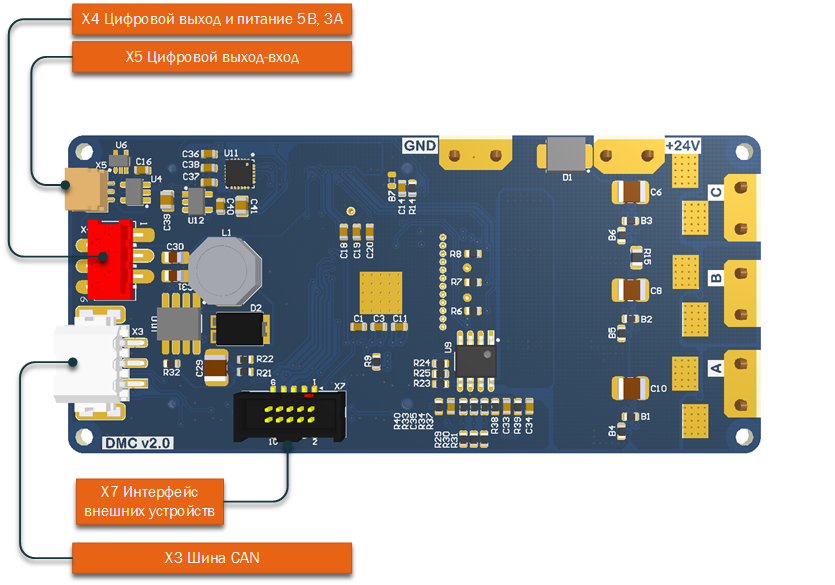
Um conversor com uma tensão de saída de 5 V integrada no módulo DC-DC é projetado para
correntes de até 3,5 A. O próprio módulo consome desse conversor não mais que 150 mA, o restante da corrente pode ser fornecido a uma carga externa do conector X4. O conector X4 é conveniente para conectar elementos de iluminação e indicação, como tiras de LED RGB baseadas em chips
WS2812B e similares. O processador suporta a formação de hardware dos bits do protocolo de codificação digital no formato
WS2812B , bem como a codificação PPM, PCM, PWM. Da mesma forma, o módulo pode receber sinais PPM e PCM sem dificuldade com carga mínima do processador.
Cálculo da frequência máxima de comutação e a justificativa para a seleção de transistores de potência
Verificamos novamente a tabela de comparação de transistores proposta no
documento da TI . Todos os parâmetros são reescritos a partir de folhas de dados.
(Clique para ampliar)Aqui, como especialistas em TI, escolhi o CSD1854Q5B. Em termos de corrente máxima, esta é a melhor escolha. E a frequência de comutação de 122 KHz vai muito além do limite razoável alcançável com o controle da família Kinetis.
Cálculo da ondulação de corrente máxima e justificativa para a seleção de capacitores de filtro
As ondulações de corrente afetam diretamente o aquecimento e a vida útil dos capacitores, especialmente os eletrolíticos. Portanto, é necessário selecionar os capacitores por tipo e classificação, levando em consideração a vida útil estimada e as correntes máximas.
Usando esta fórmula, você deve verificar se o módulo é capaz de controlar este motor sem exceder as correntes máximas do capacitor.
Como os especialistas em TI calcularam, com os capacitores indicados no diagrama, um módulo com uma frequência PWM de 40 KHz pode fornecer por um longo tempo um motor bloqueado com uma corrente através dos enrolamentos de mais de 80 A.
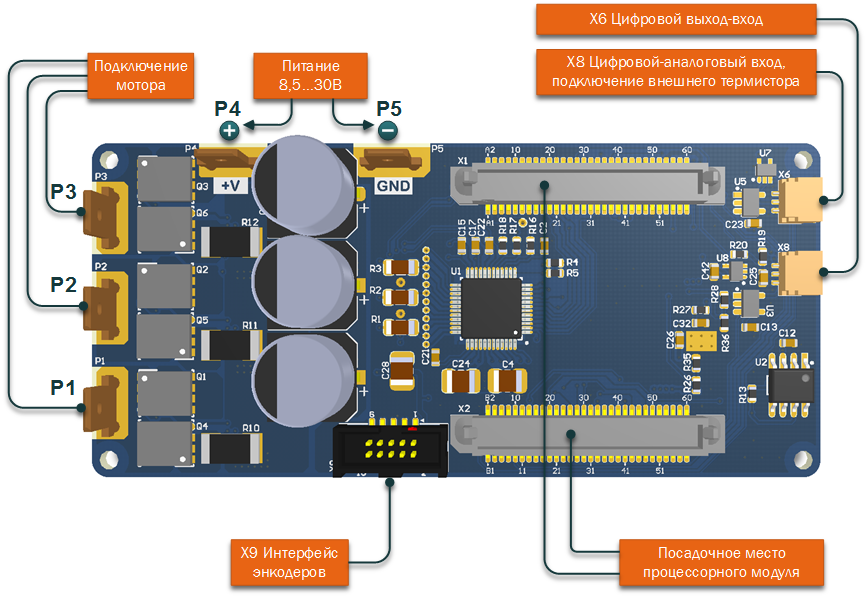
Diagrama da placa principal do módulo
(Clique para ampliar)(Clique para ampliar)Localização do conector
Vista superior da placa principal:
(Clique para ampliar)Vista da placa principal de baixo
(Clique para ampliar)Dimensões
(Clique para ampliar)Repositório do projeto
Todos os materiais relacionados ao projeto
são armazenados aqui .
O circuito e a placa de circuito são desenvolvidos no Altium Designer 17.0.6.
No repositório, você pode encontrar o
modelo de montagem
3D no formato STEP.
Há também
um arquivo de cálculo para o conversor DC-DC no A8586 no formato Mathcad.
A parte do programa do projeto será considerada no próximo artigo.